Edge and Fog Computing Platform for Data Fusion of Complex Heterogeneous Sensors

 , ,
, ,  , ,
, ,  , and
, and
Abstract
:1. Introduction
1.1. Motivation
1.2. Contributions
- It eases the integration of complex sensors into new or existing networks and applications.
- It extends the concept of the sensor itself, evolving towards a source of data so that anything generating data (simple and complex sensors, databases, open-data platforms, processing modules...) could be seamlessly treated and fused in order to develop growing applications.
- It simplifies the interaction between hardware and software developers. It provides a foundation for the coordination of teams jointly working on new sensors and/or applications. Although we are not presenting quantitative comparisons, we believe this leads to both a time and cost reduction in development.
- Finally, in order to illustrate these benefits, we have constructed an integrated traffic monitoring sensor that provides both vehicle counting and identification. Fusing the complementary data this sensor produces, we can obtain extended traffic information, like weighted travel times, that none of the original sensors could provide on their own.
2. Related Work
2.1. Edge Computing
2.2. Hardware Integration Platforms
2.3. Complex Sensors in Traffic Monitoring
3. Integration Strategy Based on Symbiotic Hardware/Software Design
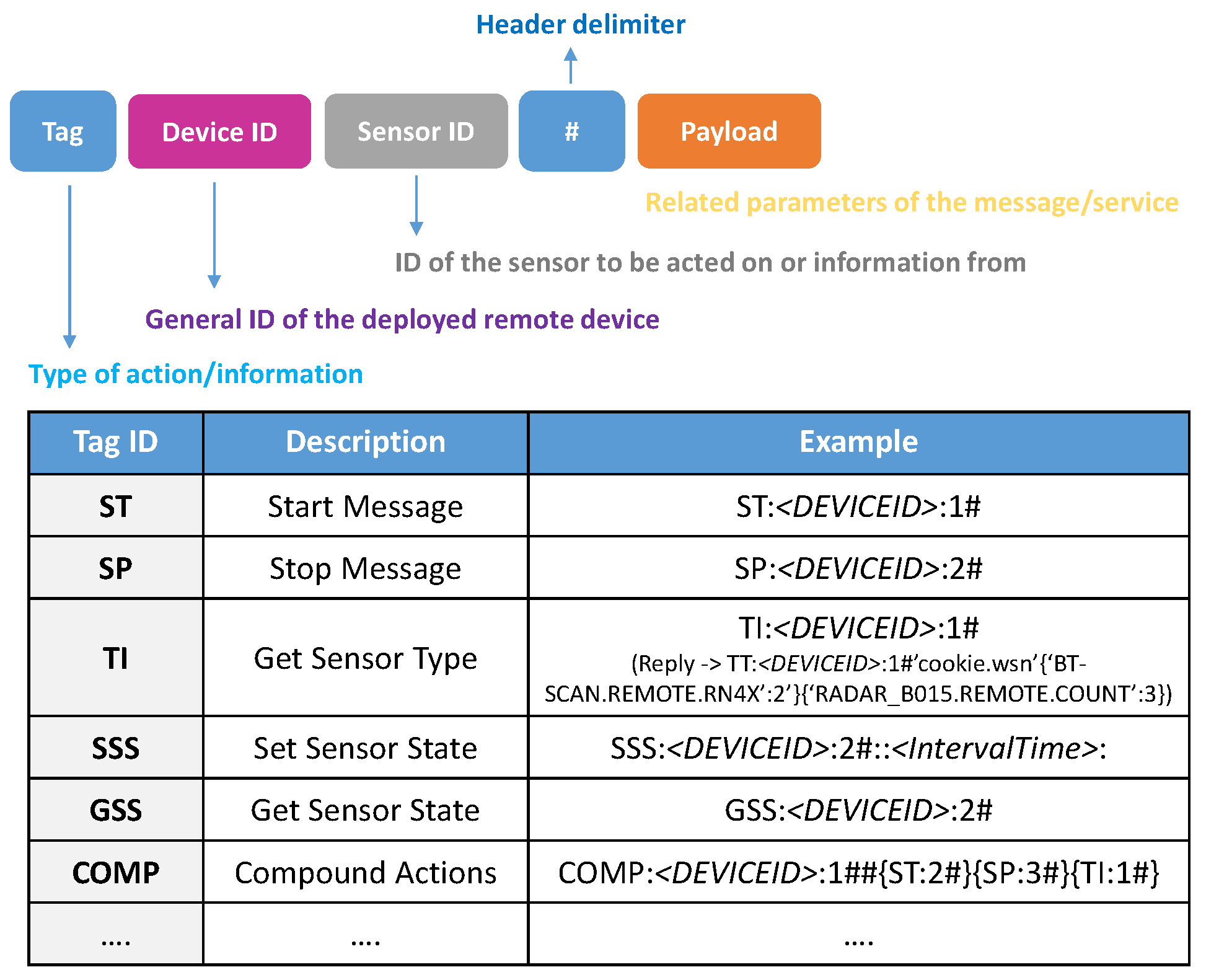
3.1. Messaging System Architecture
3.2. Sensor
- Sensor body. This is the core element and contains the basic operational logic of sensors. It handles the representation model of the sensor, holds copies of, or links to, all the semi-persistent data, and acts as a container for the other two components.
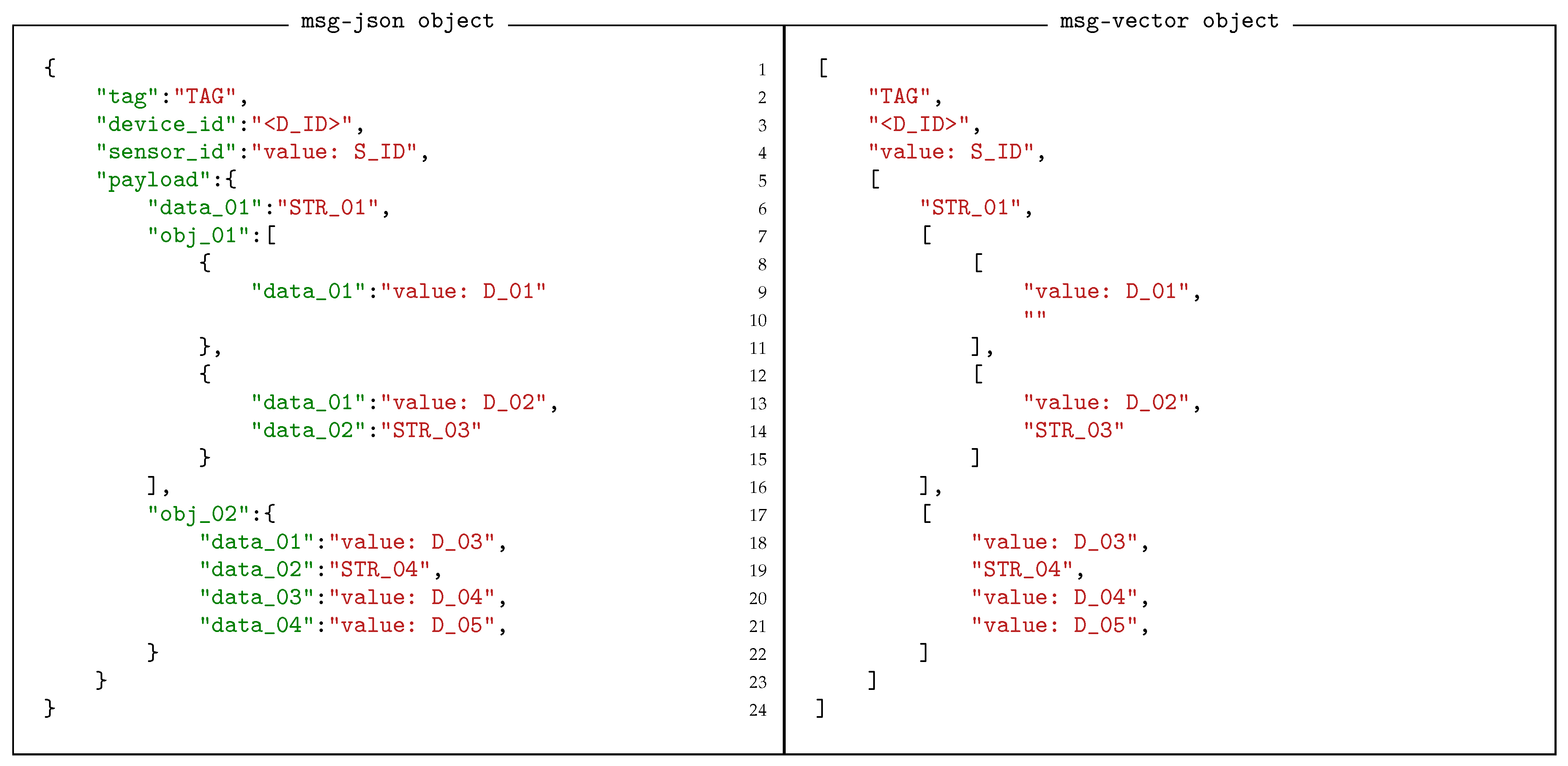
- Message Processor. This processes the incoming messages and performs any local action necessary before the message is transferred to the real sensor. It also converts any message that is in the general JSON-based format to the serial format, or vice versa, if necessary.
- Message Handlers. There can be several of these to process the messages generated by the sensor and pass them (or a processed version of them) to the appropriate network connection. It is typically in one of these handlers that the generated message can be transformed into a different representation. If it is not required such a handler is not included.

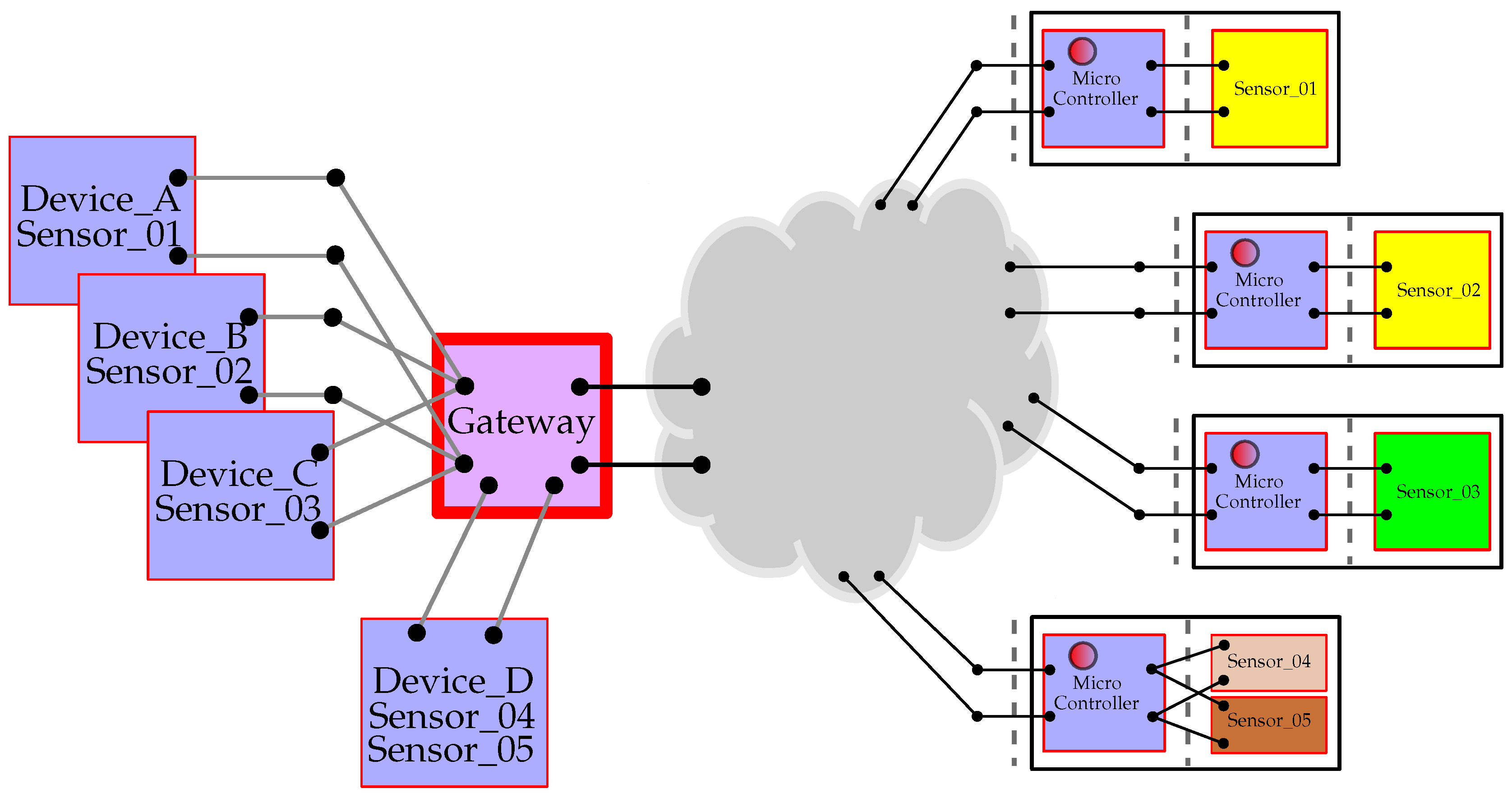
3.3. Device
- Routing: The Device is responsible for routing messages between the real sensor and the software sensor shadow. It does this by acting as an interface onto the Gateway to which it is attached.
- Type Information Management: All sensors, real or otherwise, are assigned a type description as a unique key defining its operation. As we presented in Section 3.2, within the framework, this key is an index to the message structure used by the sensor. Two different physical sensors from different manufactures that use the same message structure can use the same type key. The Device manages the type information, so when a new sensor appears on the Device, it negotiates directly with the sensor to retrieve the type information and construct a corresponding sensor shadow to manage its operation.
- Device Control Functionality: The Device itself can expose some functionality that cuts across multiple sensors. Hence there needs to be message processing functionality in the Device itself. This is done by providing a special sensor allocation, the control sensor, assigned the Sensor ID to the value 1. This object follows all the rules of a normal sensor and, consequently, also incorporates the ability of implementing specific functionalities locally.
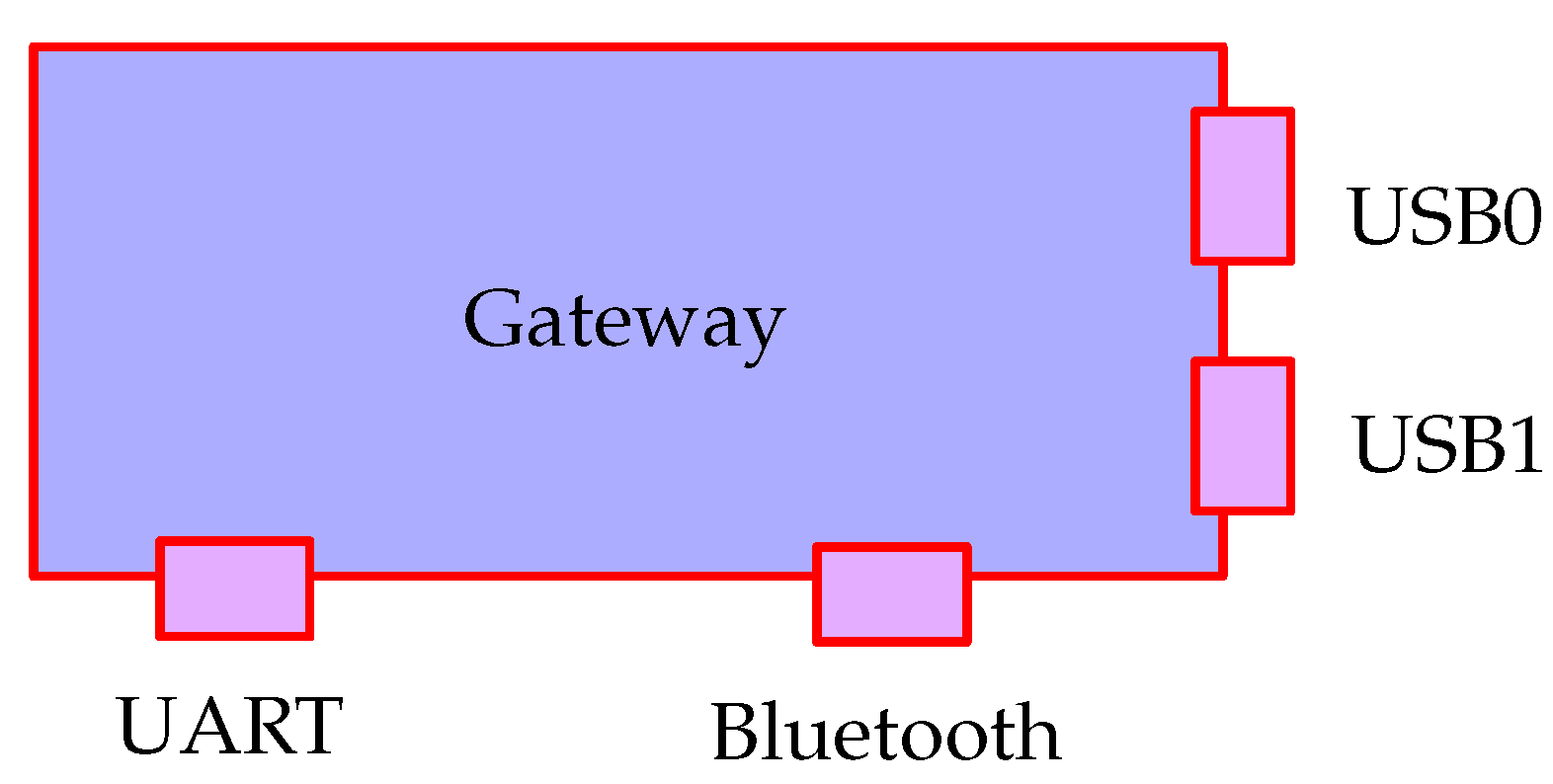
3.4. Gateway

3.5. Messaging Abstraction
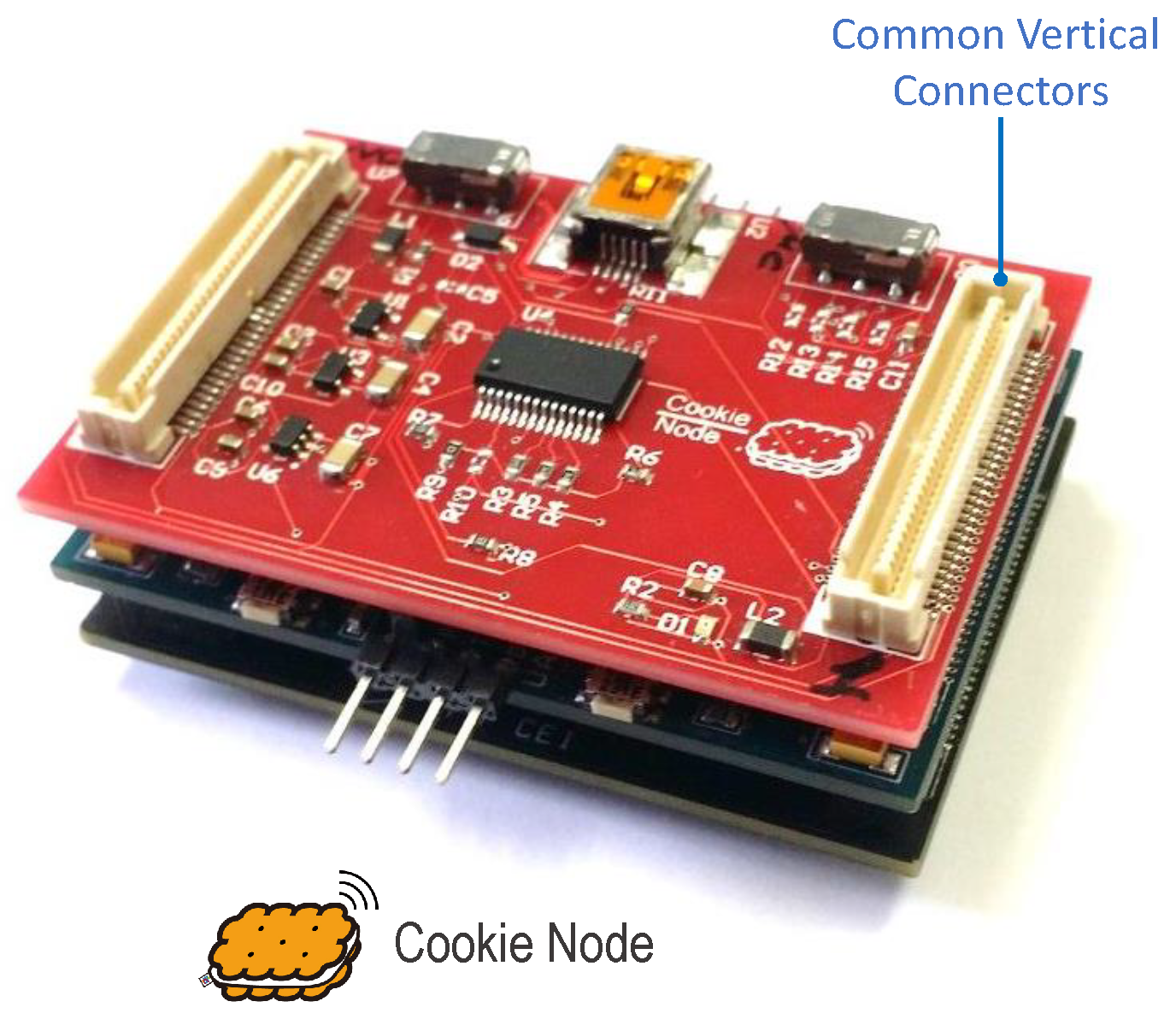
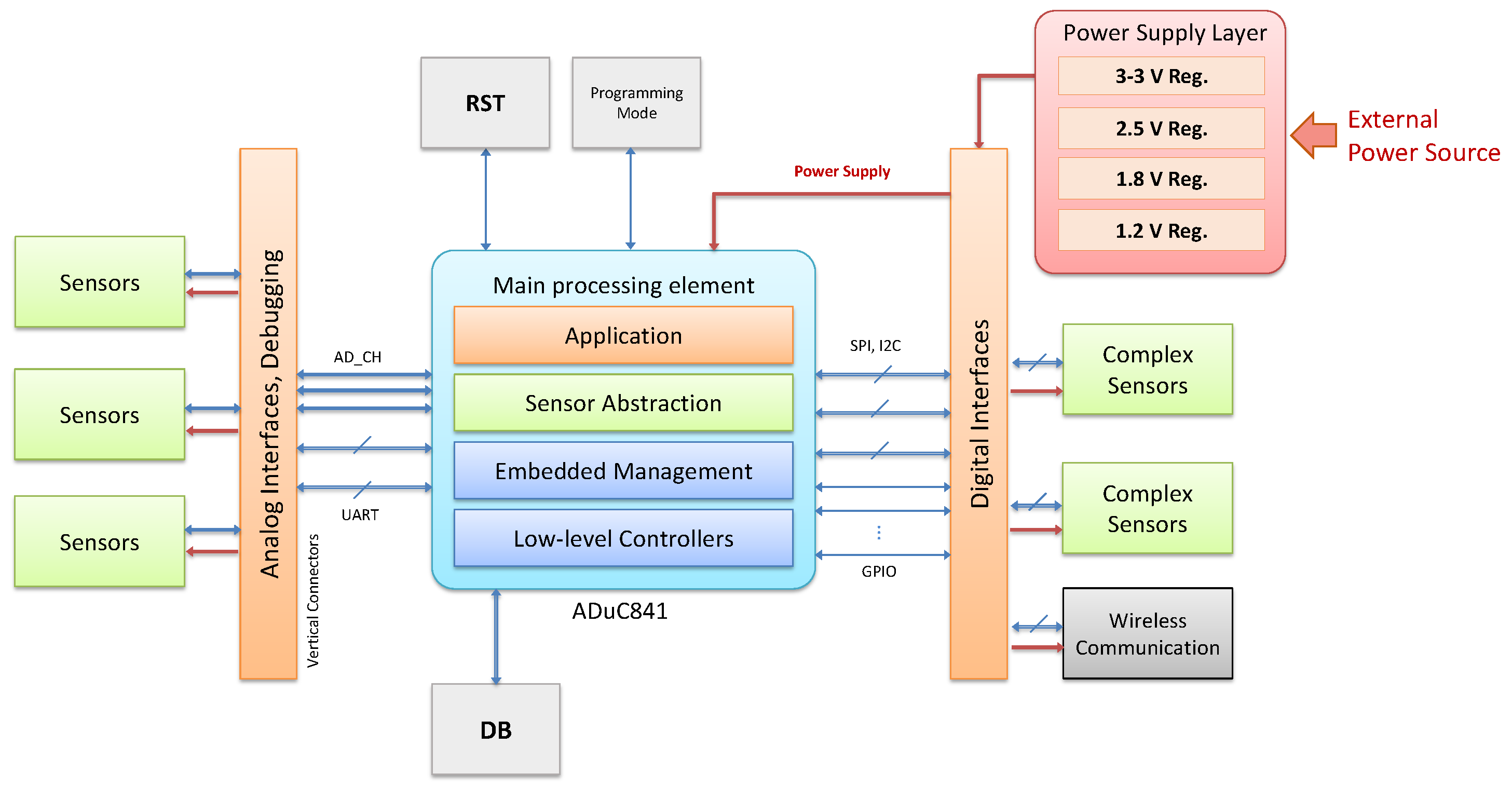
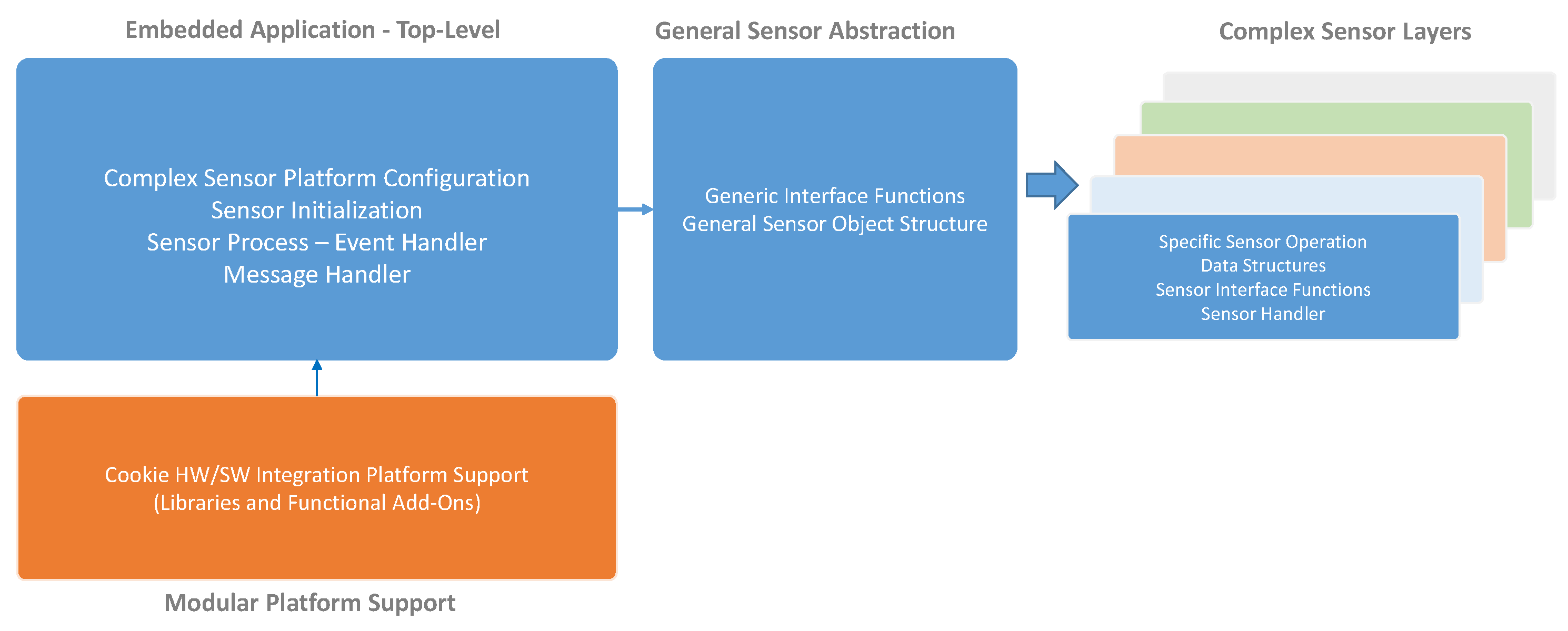
3.6. Modular Embedded Architecture for the Edge Devices
- Device level: It refers to intrinsic configuration or information of the Cookie node, and it provides support for gathering information from or sending configuration to all the plugged sensor layers in the same message stream. The device is effectively addressed by setting Sensor_ID=1.
- Sensor level: Specifically, parameters, configuration, and data gathering from a particular sensor associated with a specific sensor level.
- Composite level: This allows the multiplexing of multiple messages from various sensors into a single message body. In effect it eliminates the need to duplicate the Device_ID when many messages are being generated by that device.
4. Real Use Case: Bluetooth Identifier and Radar Counter
4.1. Radar Counter
4.2. Bluetooth Identifier
4.3. Information Flow within the Hardware
4.4. Integrated Vehicle Counting and Identification Data


5. Results
5.1. Data Rate Reduction of Complex Sensors
5.2. Integration of Complex Sensors
5.3. Data Fusion of Complex Sensors

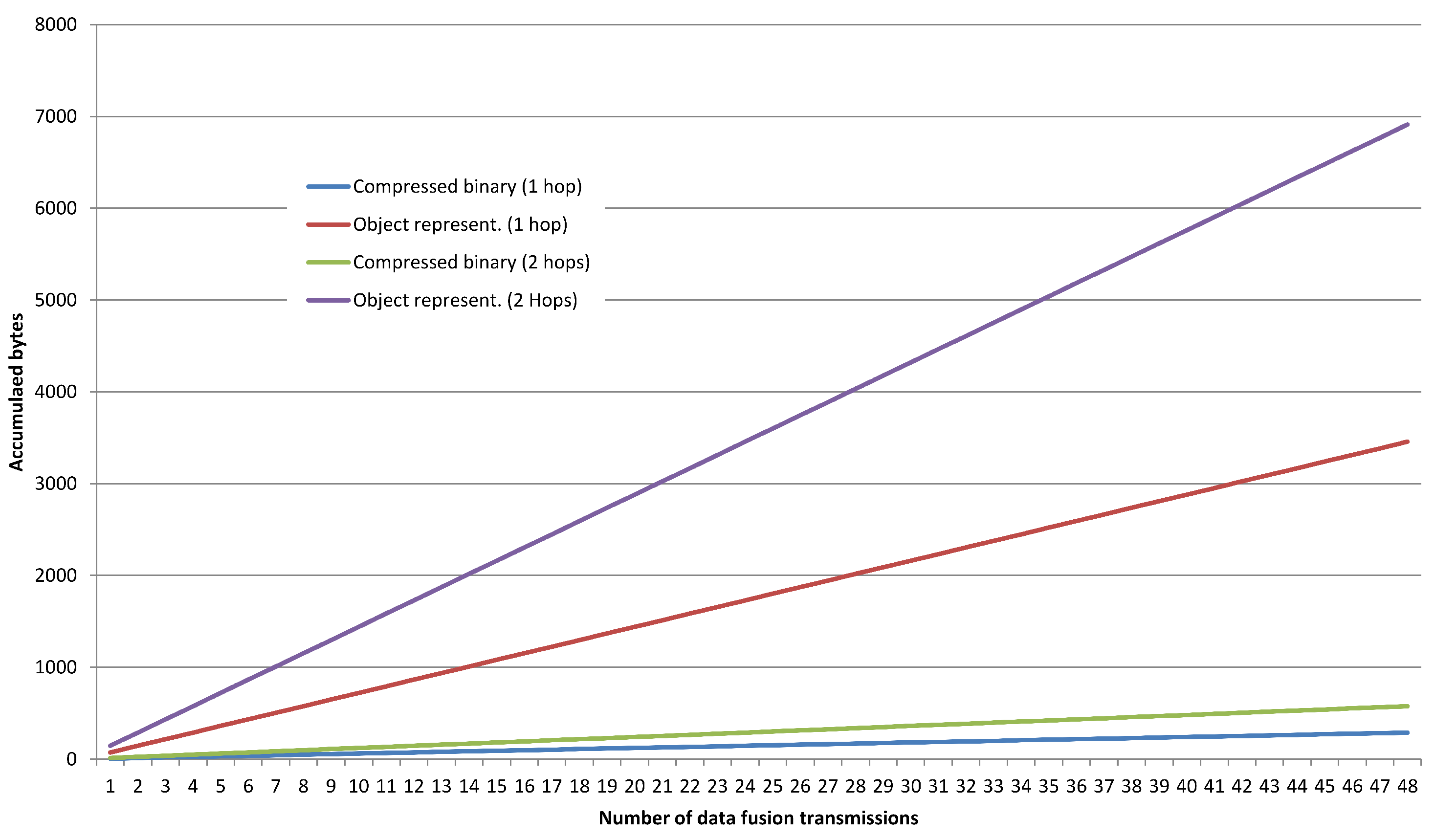
5.4. Optimization of the Network Overhead for the Data Fusion
5.5. Reduction of Development Times
- Independent hardware design and implementation: The modularity of the Cookie architecture accelerated the effective inclusion of the two complex sensors for this real use case. This was a result of having design rules to specify and implement a new Cookie layer within the architecture, and parametrized hardware interfaces in the form of hardware design templates available for the developers. This fact does not only encompass the integration of a particular sensor with a fixed processing element (as is the usual case in commercial devices), but also relying on trivial re-usability of a large family of pre-existing Cookie layer IoT hardware technologies (the result of 10 years of applying this architecture in several real deployments.) This includes: Various processing technologies (a combination of different microcontrollers and if more intensive processing is required FPGAs are also available), wireless communication (including wide-extended low-power wireless network protocols,) and flexible power supply. Users do not need to perform the design of a new overall board to integrate their new complex sensor, but just a new Cookie layer that can be directly plugged into the modular stack. If they need particular requirements for the target application, they can evaluate the repository of hardware layers and, in case a unique feature is necessary to comply with specific constraints and they are not covered by the repository, a new layer can be designed without affecting the other layers (for instance, the processing layer can be empower with a desired processing specification but the communication technology will remain unaltered). Table 5 summarizes the development time reduction based on authors’ experience in the hardware design for this real use case.
- Manufacturing Costs: Based on the aforementioned modularity and re-usability of the Cookie architecture, the manufacturing of the network prototype is considerably reduced in terms of complexity and cost, since the process is indeed focused only on those independent layers rather than the (re)design of the overall embedded platform to be deployed. Specifically, according to the real expenses of the proposed complex sensors, there is a 90% of cost reduction in the manufacturing process, which was also reflected in a shorter delivery time for the final prototypes.
- Integration effort at both hardware and software levels: The modularization of the software and the standardized messaging approach has a similar effect on incorporating a new sensor into the network side. The modularized library of the Cookie makes it much easier to add messages to the input/output of the Cookie module.In addition the standard form of the messaging means the gateway side of the software needs little, or no modification. Unless message representation conversion is required in the gateway nothing needs to be added. A new sensor board can be implemented, then simply turned on and its messaging will appear in the network. This does not mean to say that the processing of the messages does not need to be designed and implemented (which is simply an application level process), but the mechanism of getting the information from the sensor to wherever it is required is already available.This significantly simplifies the joint development of hardware and software teams, which only have to concentrate on their own requirements letting the common messaging interface deal with the interaction between these two areas.
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Barnett, J. DSN Problems—An Overview. In Proceedings of a Workshop on Distributed Sensor Nets Held at Pittsburg; Defense Technical Information Center: Fort Belvoir, VA, USA, 1978; pp. 37–40. [Google Scholar]
- Chiang, M.; Zhang, T. Fog and IoT: An Overview of Research Opportunities. IEEE Internet Things J. 2016, 3, 854–864. [Google Scholar] [CrossRef]
- El-Sayed, H.; Sankar, S.; Prasad, M.; Puthal, D.; Gupta, A.; Mohanty, M.; Lin, C.T. Edge of Things: The Big Picture on the Integration of Edge, IoT and the Cloud in a Distributed Computing Environment. IEEE Access 2018, 6, 1706–1717. [Google Scholar] [CrossRef]
- Wilby, M.R.; Rodríguez González, A.B.; Vinagre Díaz, J.J.; Requena Carrión, J. Neuromorphic Sensor Network Platform: A Bioinspired Tool to Grow Applications in Wireless Sensor Networks. Int. J. Distrib. Sens. Netw. 2015, 11, 230401. [Google Scholar] [CrossRef]
- Mujica, G.; Rosello, V.; Portilla, J.; Riesgo, T. Hardware-software integration platform for a WSN testbed based on cookies nodes. In Proceedings of the IECON 2012—38th Annual Conference on IEEE Industrial Electronics Society, Monteral, QC, Canada, 25–28 October 2012; pp. 6013–6018. [Google Scholar]
- Hashem, I.A.T.; Yaqoob, I.; Anuar, N.B.; Mokhtar, S.; Gani, A.; Ullah Khan, S. The Rise of “Big Data” on Cloud Computing. Inf. Syst. 2015, 47, 98–115. [Google Scholar] [CrossRef]
- Yi, S.; Li, C.; Li, Q. A Survey of Fog Computing: Concepts, Applications and Issues. In Proceedings of the 2015 Workshop on Mobile Big Data, Miami, FL, USA, 22–25 June 2015; ACM: New York, NY, USA, 2015; pp. 37–42. [Google Scholar]
- Bonomi, F.; Milito, R.; Zhu, J.; Addepalli, S. Fog Computing and its Role in the Internet of Things. In Proceedings of the First Edition of the MCC Workshop on Mobile Cloud Computing—MCC ’12, Helsinki, Finland, 13–17 August 2012; ACM Press: New York, NY, USA, 2012; p. 13. [Google Scholar]
- Premsankar, G.; Francesco, M.D.; Taleb, T. Edge Computing for the Internet of Things: A Case Study. IEEE Internet Things J. 2018, 5, 1275–1284. [Google Scholar] [CrossRef]
- Alioto, M.; Shahghasemi, M. The Internet of Things on Its Edge: Trends Toward Its Tipping Point. IEEE Consum. Electron. Mag. 2018, 7, 77–87. [Google Scholar] [CrossRef]
- Rajaram, V.; Qian, Z.; Kang, S.; McGruer, N.E.; Rinaldi, M. MEMS-based Near-zero Power Infrared Wireless Sensor Node. In Proceedings of the 2018 IEEE 31th International Conference on Micro Electro Mechanical Systems (MEMS), Belfast, UK, 21–25 January 2018; pp. 17–20. [Google Scholar]
- Pinrod, V.; Pancoast, L.; Davaji, B.; Lee, S.; Ying, R.; Molnar, A.; Lal, A. Zero-power Sensors with Near-zero-power Wakeup Switches for Reliable Sensor Platforms. In Proceedings of the 2017 IEEE 30th International Conference on Micro Electro Mechanical Systems (MEMS), Las Vegas, NV, USA, 22–26 January 2017; pp. 1236–1239. [Google Scholar]
- Zornoza, J.; Mujica, G.; Portilla, J.; Riesgo, T. Merging smart wearable devices and wireless mesh networks for collaborative sensing. In Proceedings of the 2017 32nd Conference on Design of Circuits and Integrated Systems (DCIS), Barcelona, Spain, 22–24 November 2017; pp. 1–6. [Google Scholar]
- Texas Instruments Ultra-Low-Power MCU, TI MSP430 Family & Datasheet. Available online: http://www.ti.com/lit/ds/symlink/msp430fg439.pdf (accessed on 13 November 2017).
- Microchip Technology ATSAMD21, Cortex-M0+ Based Microcontroller & Datasheet. Available online: https://cdn-shop.adafruit.com/product-files/2772/atmel-42181-sam-d21_datasheet.pdf (accessed on 15 December 2016).
- Skolnik, M. Radar Handbook, 3rd ed.; Electronics Electrical Engineering; McGraw-Hill Education: New York, NY, USA, 2008. [Google Scholar]
- Haghani, A.; Hamedi, M.; Farokhi Sadabadi, K.; Young, S.; Tarnoff, P. Data Collection of Freeway Travel Time Ground Truth with Bluetooth Sensors. Transp. Res. Rec. 2010, 2160, 60–68. [Google Scholar] [CrossRef]
- Vinagre Díaz, J.J.; Rodríguez González, A.B.; Wilby, M.R. Bluetooth Traffic Monitoring Systems for Travel Time Estimation on Freeways. IEEE Trans. Intell. Transp. Syst. 2016, 17, 123–132. [Google Scholar] [CrossRef]
- Faouzi, N.E.E.; Leung, H.; Kurian, A. Data fusion in intelligent transportation systems: Progress and challenges—A survey. Inf. Fusion 2011, 12, 4–10. [Google Scholar] [CrossRef]
- OASIS. MQTT Version 3.1.1 Plus Errata 01. Available online: http://docs.oasis-open.org/mqtt/mqtt/v3.1.1/mqtt-v3.1.1.html (accessed on 15 December 2016).
- Vinoski, S. Advanced Message Queuing Protocol. IEEE Internet Comput. 2006, 10, 87–89. [Google Scholar] [CrossRef]
- Esposito, C.; Castiglione, A.; Palmieri, F.; Ficco, M.; Dobre, C.; Iordache, G.V.; Pop, F. Event-based sensor data exchange and fusion in the Internet of Things environments. J. Parallel Distrib. Comput. 2018, 118, 328–343. [Google Scholar] [CrossRef]
- RFbeam Microwave GmbH K-LC5 Radar Transceiver & Datasheet. Available online: https://www.rfbeam.ch/files/products/9/downloads/Datasheet_K-LC5.pdf (accessed on 31 January 2017).
- Microchip Technology (previously Roving Networks) Bluetooth Data Module Command Reference & Advanced Information User’s Guide. Available online: http://ww1.microchip.com/downloads/en/DeviceDoc/bluetooth_cr_UG-v1.0r.pdf (accessed on 24 January 2014).











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Type of Sensor | Parameter | Action |
|---|---|---|
| Bluetooth scanner | Inquiry Window | Configures the maximum time of MAC scanning per inquiry. |
| Inquiry Trigger Interval | Configures the timeout after with a new Inquiry is to be triggered. | |
| Transmission Power | Configures the value of the transmission power in dBm. | |
| Detection Delay | Configures the delay between two detections. | |
| Radar traffic counter | Vehicle Direction | Configures the type of vehicle detection in accordance with the sensor orientation (Vehicle approaching/exiting). |
| Noise Threshold | Tunes the noise level threshold to adapt the radar to the particular conditions of the scenario. | |
| Led Notification | Configures the behavior of the Onboard Led (for Debugging purposes). |
| Parameter | Experimental Setup |
|---|---|
| Sample rate | 2 × KB/s |
| Window Size | 128 samples |
| ADC resolution | 16 bits |
| Velocity type | 32-bit float |
| Radar range | 10 m |
| Data | Data Rate (KB/s) | Accumulated Data Reduction |
|---|---|---|
| Unprocessed Data Stream | 50 | - |
| Velocity Data (1 target) | ||
| Counting Data (3 vehicles each second) |
| Data | Number of Records | Accumulated Data Reduction |
|---|---|---|
| Single detections in origin and destination | - | |
| Double detections in the corresponding link | 2849 | |
| Valid double detections (discarding outliers) | 1919 | |
| Calculated travel times | 212 |
| Complex Sensor Layer | Normal Development + Testing Time Estimation (Person/Hour) | Framework-Based Development + Testing Time (Person/Hour) | Reduction (%) |
|---|---|---|---|
| Bluetooth board | 140 | 35 | 75 |
| Radar Board | 350 | 70 | 80 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mujica, G.; Rodriguez-Zurrunero, R.; Wilby, M.R.; Portilla, J.; Rodríguez González, A.B.; Araujo, A.; Riesgo, T.; Vinagre Díaz, J.J. Edge and Fog Computing Platform for Data Fusion of Complex Heterogeneous Sensors. Sensors 2018, 18, 3630. https://doi.org/10.3390/s18113630
Mujica G, Rodriguez-Zurrunero R, Wilby MR, Portilla J, Rodríguez González AB, Araujo A, Riesgo T, Vinagre Díaz JJ. Edge and Fog Computing Platform for Data Fusion of Complex Heterogeneous Sensors. Sensors. 2018; 18(11):3630. https://doi.org/10.3390/s18113630
Chicago/Turabian StyleMujica, Gabriel, Roberto Rodriguez-Zurrunero, Mark Richard Wilby, Jorge Portilla, Ana Belén Rodríguez González, Alvaro Araujo, Teresa Riesgo, and Juan José Vinagre Díaz. 2018. "Edge and Fog Computing Platform for Data Fusion of Complex Heterogeneous Sensors" Sensors 18, no. 11: 3630. https://doi.org/10.3390/s18113630
APA StyleMujica, G., Rodriguez-Zurrunero, R., Wilby, M. R., Portilla, J., Rodríguez González, A. B., Araujo, A., Riesgo, T., & Vinagre Díaz, J. J. (2018). Edge and Fog Computing Platform for Data Fusion of Complex Heterogeneous Sensors. Sensors, 18(11), 3630. https://doi.org/10.3390/s18113630