New Approach of High Sensitivity Techniques Using Collective Detection Method with Multiple GNSS Receivers

Abstract
:1. Introduction
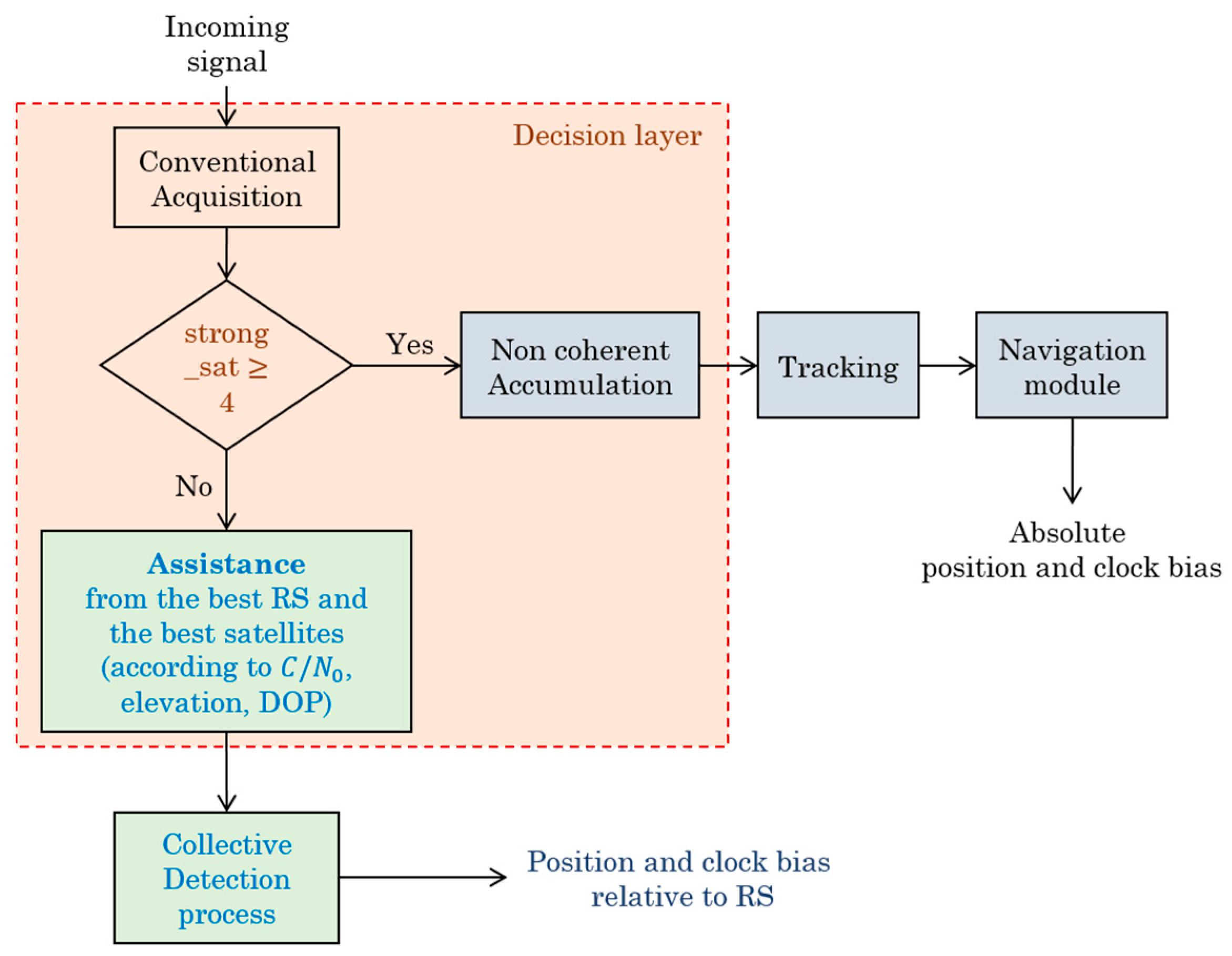
- Depending on the type of receiver start-up (cold/warm/hot): use relevant information in the receiver or perform the normal process.
- According to level: use high sensitivity techniques (long coherent integration with non-coherent accumulation).
- Depending on the number of received GNSS signals: track more powerful signal by standard tracking or combine various available signals using collective detection.
2. Collective Detection Approach
2.1. Dependence on Assistance Data
2.2. Working Principle of Collective Detection
2.3. SPL Delta Corrected FFT Technique in CD
3. Smart Collaborative Positioning Using CD Approach
3.1. Influence of Some Parameters in CD Process
3.2. Best Satellites Selection Algorithm in CD Process
- (1)
- For each RS that can assist the user:
- (i)
- Get the elevations and azimuths of all satellites in view and sort them with their elevations in ascending order.
- (ii)
- Select the better satellites with higher :It is necessary to choose a certain value as a threshold for the selection of strong and weak satellites. For example, we can choose the nominal value of 45 dB-Hz as the threshold value. This can be changed according to the objectives set for the receiver design. This operation corresponds to Equation (18).
- (iii)
- Select the best satellites with higher elevation angles:It is necessary to choose a certain value as a threshold for the selection of satellites as good or bad according to their angle of elevation. To have good satellites, the threshold can be set at , i.e., exclude satellites with elevation lower than , even it is very common to define an elevation mask of . The algorithm will just choose the satellites having the best angles, i.e., which have the highest angles. This operation corresponds to Equation (19).
- (2)
- Assign weights to each satellite in view corresponding to both parameters, for and for the elevation angle.
- (3)
- Compute the cost function according to assigned weights and select the best satellites. If the satellites selected by each RS have the same parameters by calculating the cost function, then select the satellites that make up the best GDOP among the satellites, i.e., look up the optimal geometry according to the number of available satellites. This operation corresponds to Equation (20).
- (4)
- Choose the best RS, which has optimal results, among the available RS which can assist the MS. The choice of the best RS can be made by comparing their statistical characteristics, i.e., the results obtained in code phase estimation from both RS. For each RS, the mean error and the standard deviation of the difference between the estimated code phase and the true code phase are compared. If all RS have the same parameters or the same costs (almost impossible in reality), choose the nearest reference station, and in the case where the RSs are at an equal distance from the MS, choose one RS randomly. Otherwise, an interesting alternative is to use two or more RS at the same time in the calculation of individual and collective detection metrics to estimate the position of the MS. The feasibility of this technique is demonstrated in [14].
- (5)
- Send assistance data from the best RS or from both RS according to step 4.
- (6)
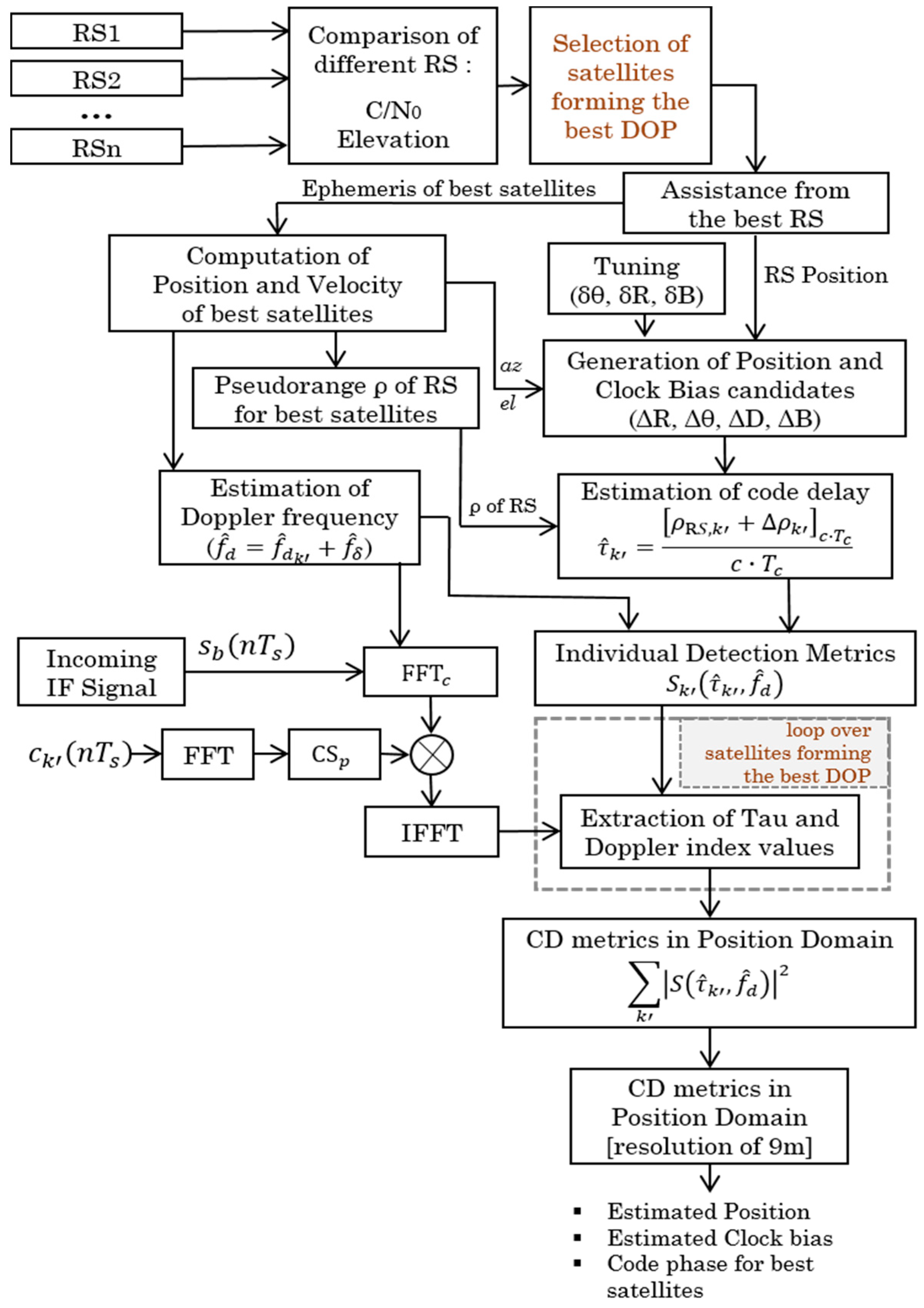
- Perform CD process:
- -
- Correlation as a function of code phase and Doppler estimated by SPL method with delta correction, refered to Equation (16).
- -
- Based on polar coordinates in 2 or 3 iterations
- -
- CD metric is calculated as the sum of the best satellites chosen in steps 1, 2 and 3, while combining measurements from all RS.
- (7)
- Estimate the user MS position.
4. Experimental Results and Performance Analysis
4.1. Smart Collaborative Positioning: Selection of the Best RS
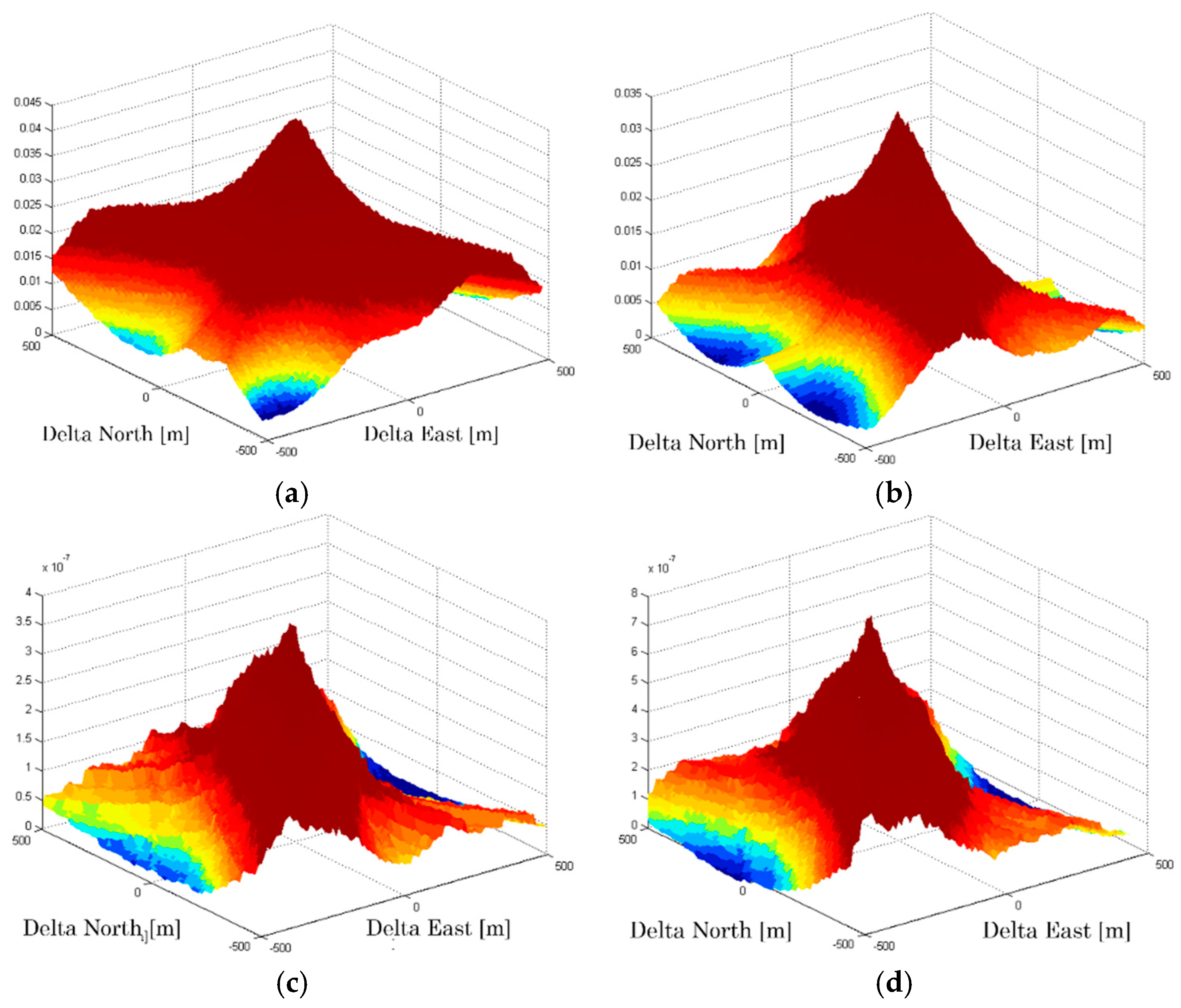
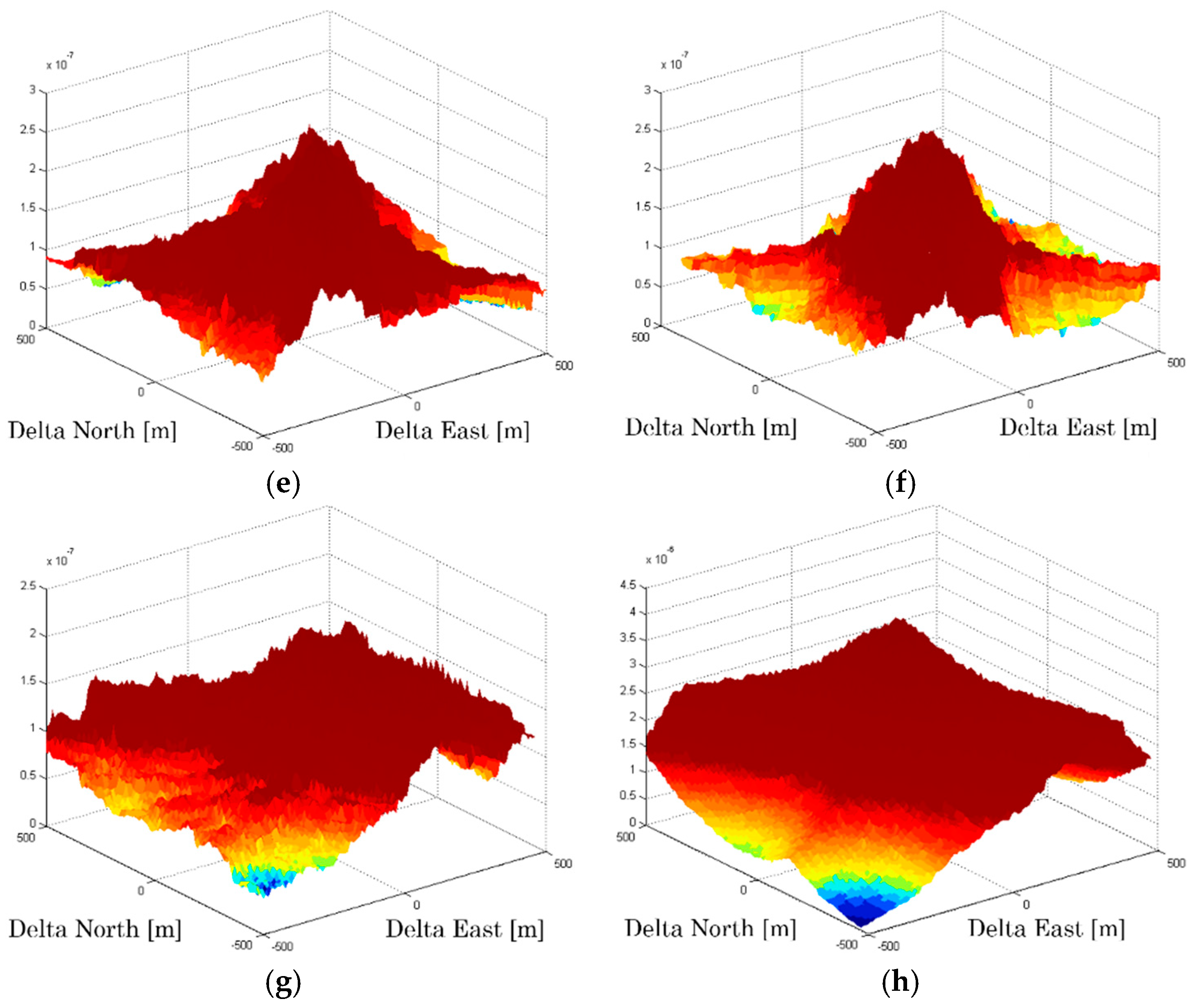
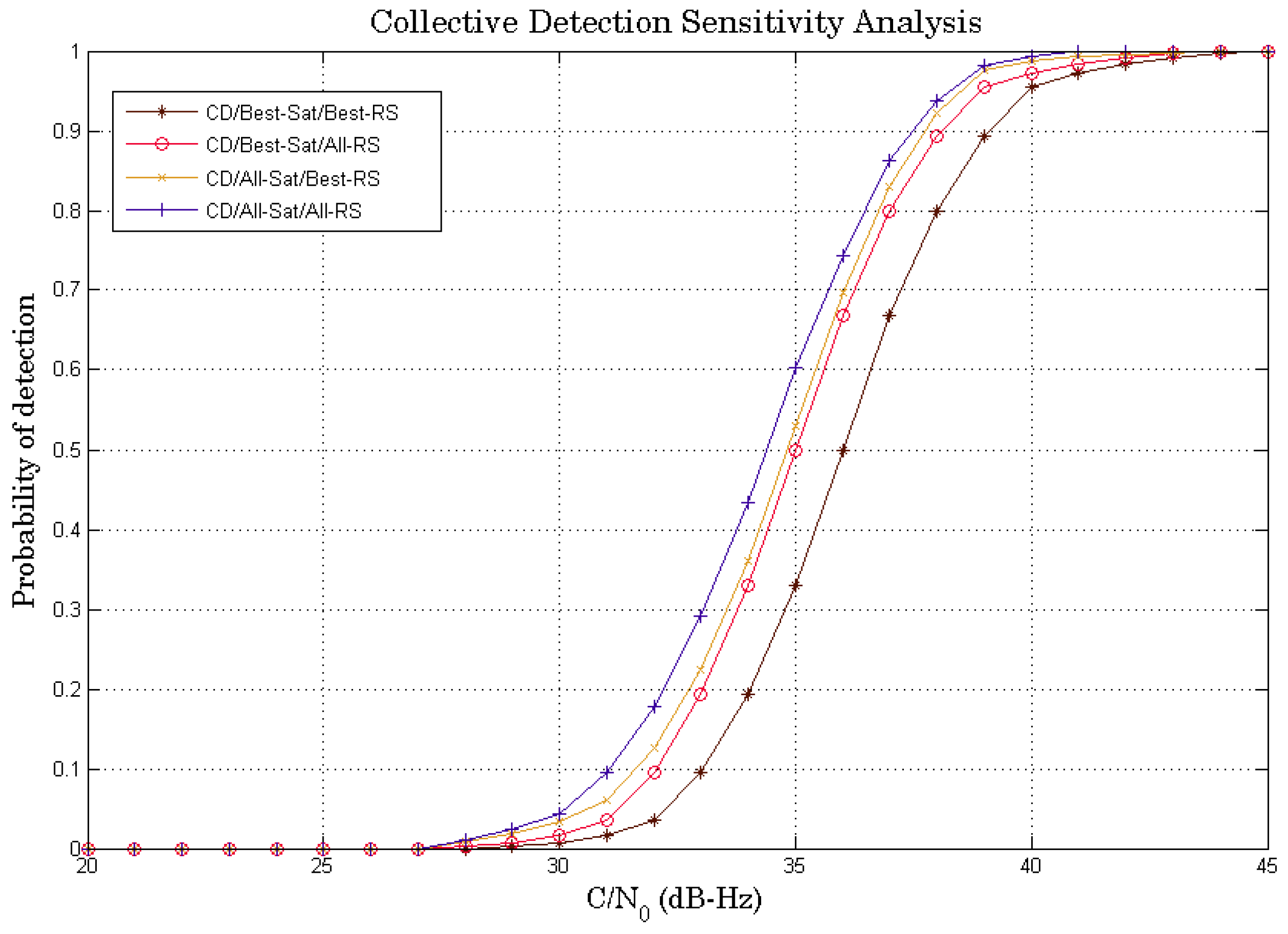
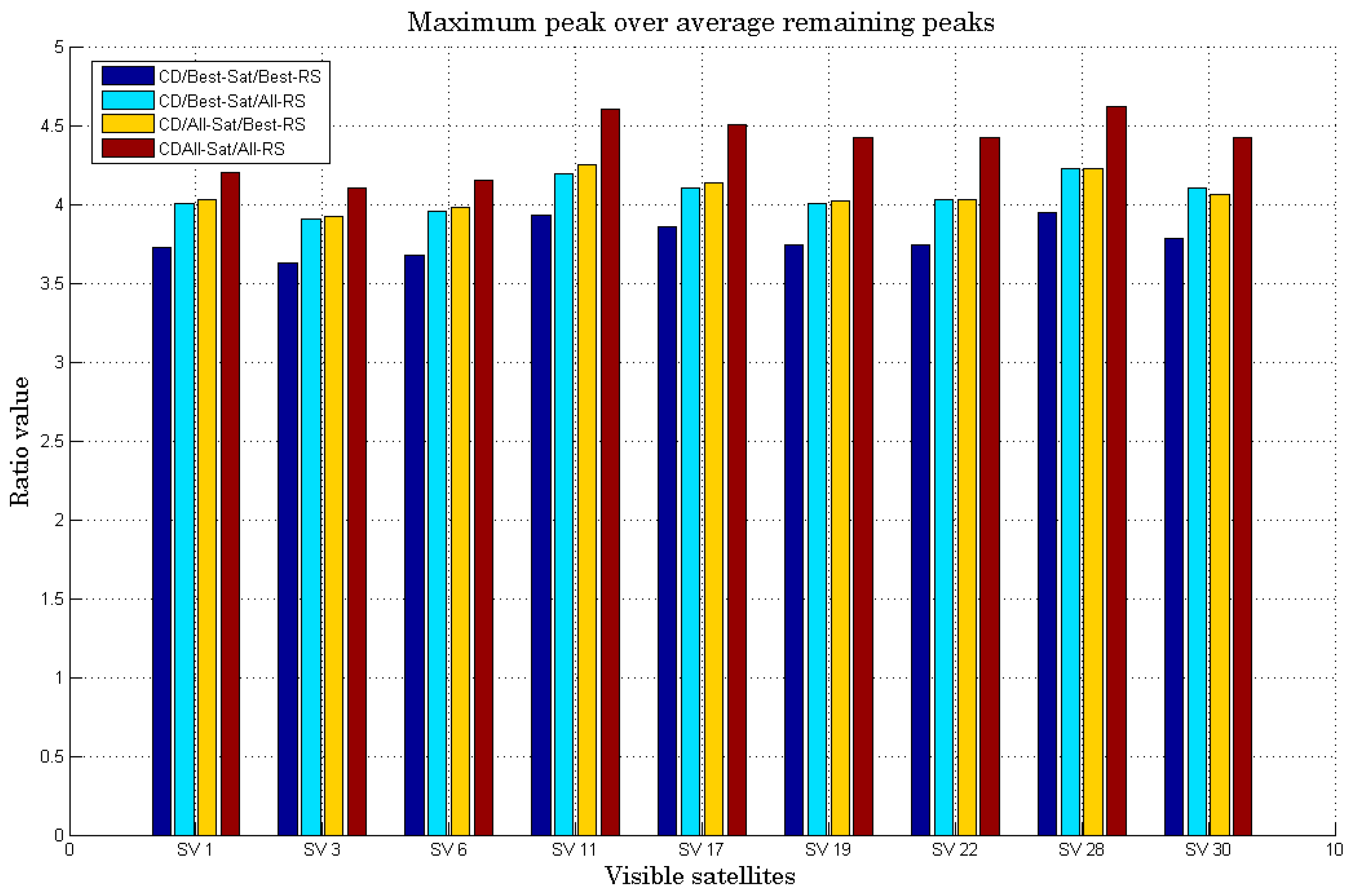
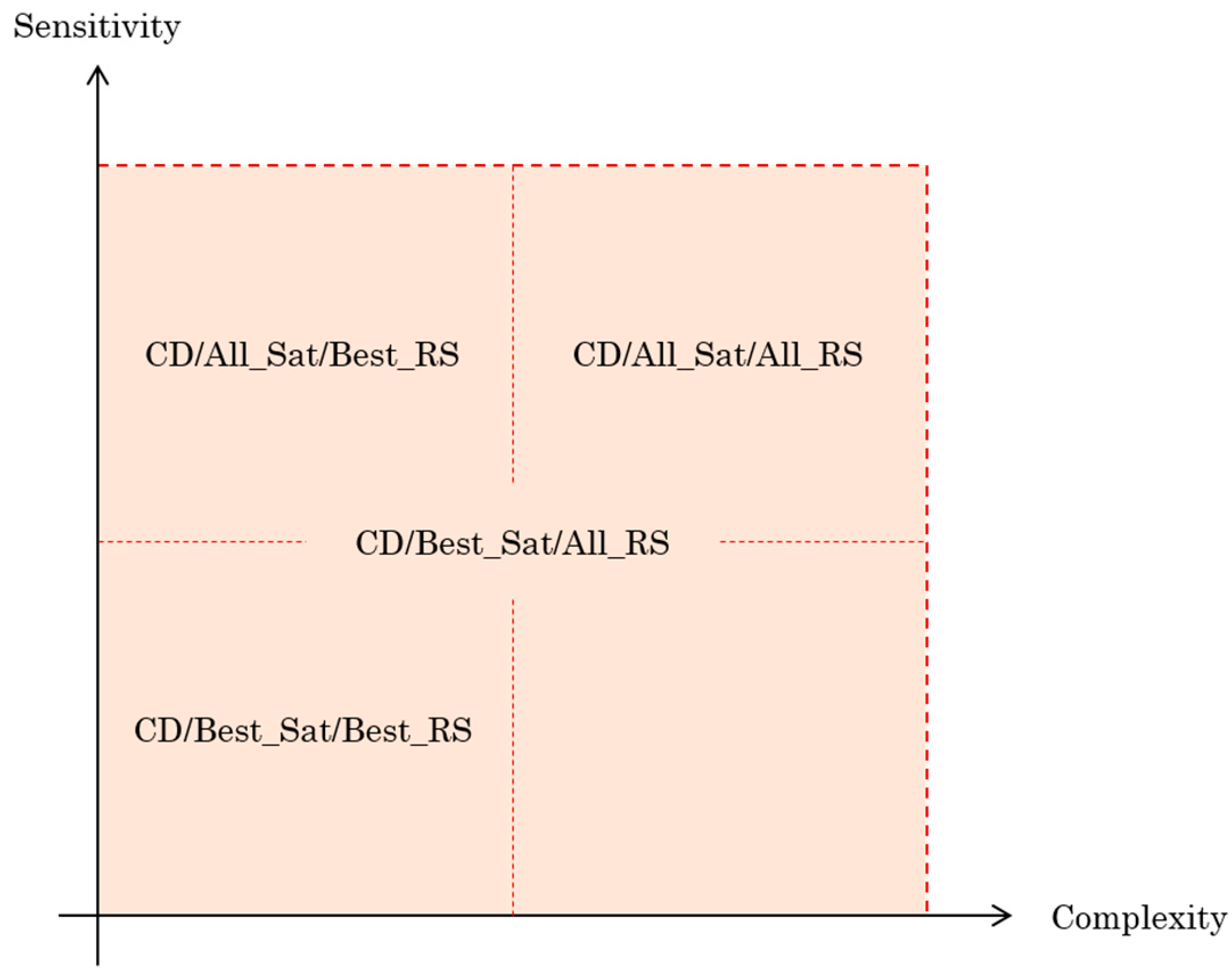
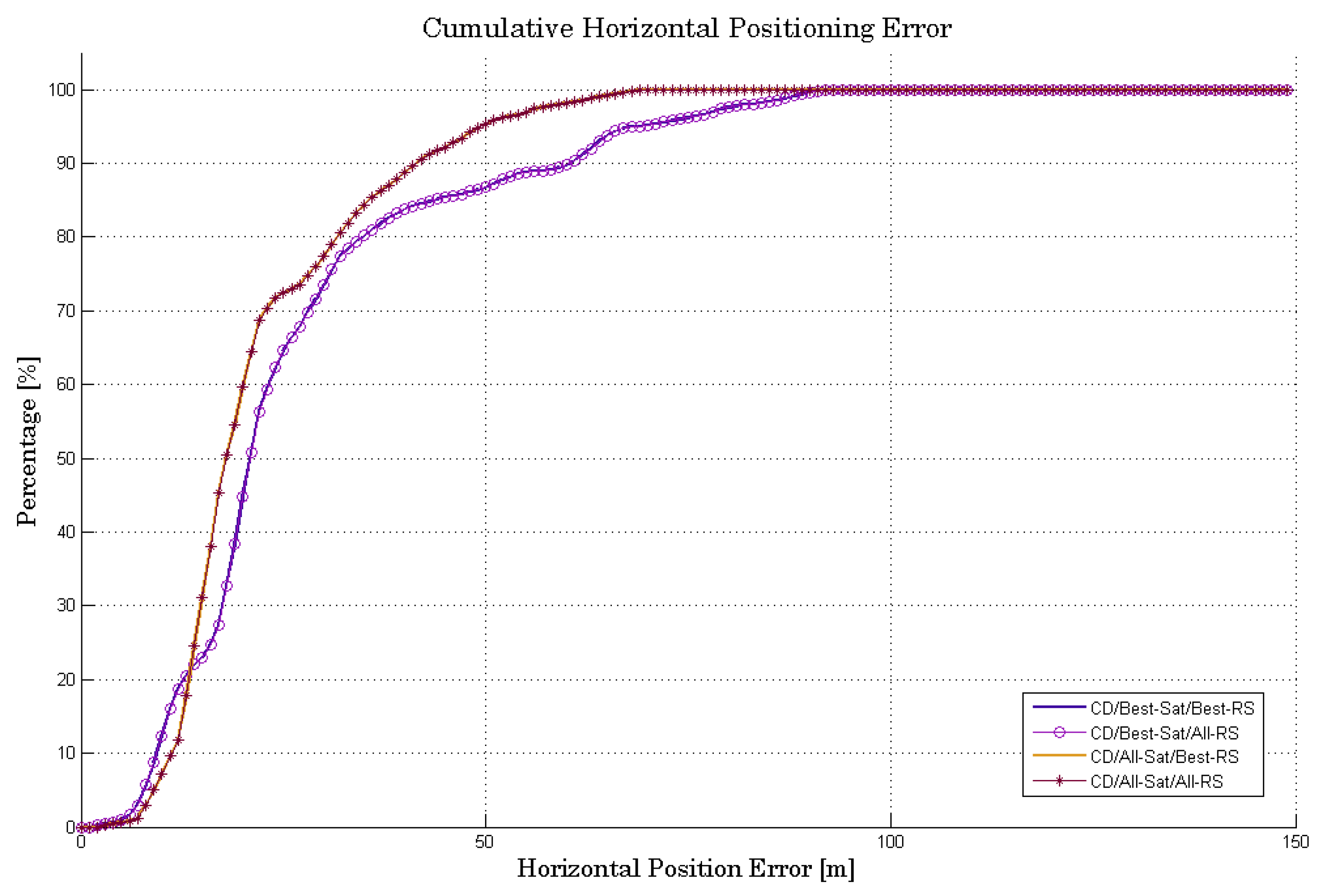
- (1)
- CD in function of best satellites and best RS “CD/Best_Sat/Best_RS”,
- (2)
- CD in function of best satellites and all RS “CD/Best_Sat/All_RS”,
- (3)
- CD in function of all visible satellites and best RS “CD/All_Sat/Best_RS”, and
- (4)
- CD in function of all visible satellites and all RS “CD/All_Sat/All_RS”.
4.2. Sensitivity Analysis
4.3. Complexity Analysis
4.4. Accuracy Analysis: Working with Optimum Number of Parameters
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Seco-Granados, G.; López-Salcedo, J.; Jiménez-Baños, D.; López-Risueño, G. Challenges in Indoor Global Navigation Satellite Systems: Unveiling its Core features in Signal Processing. IEEE Signal Process. Mag. 2012, 29, 108–131. [Google Scholar] [CrossRef]
- DiEsposti, R. GPS SV Code Signal Processing and Receiver Design for Simultaneous All-In-View Coherent Signal Acquisition and Navigation Solution Determination; ION NTM: San Diego, CA, USA, 2007. [Google Scholar]
- Axelrad, P.; Bradley, B.; Donna, J.; Mitchell, M.; Mohiuddin, S. Collective detection and direct positioning using multiple GNSS satellites. J. Inst. Navig. 2011, 58, 305–321. [Google Scholar] [CrossRef]
- Cheong, J. Signal Processing and Collective Detection for Locata Positioning System. Ph.D. Thesis, University of New South Wales, Sydney, Australia, 2012. [Google Scholar]
- Andrianarison, M.; Sahmoudi, M.; Landry, R. Cooperative Detection of Multiple GNSS Satellite Signals in GNSS-Challenged Environments. In Proceedings of the 28th ITM of ION, ION GNSS+ 2015, Tampa, FL, USA, 14–18 September 2015; pp. 370–380. [Google Scholar]
- Omar, A.B.; Sahmoudi, M.; Esteves, P.; Ries, L.; Andrianarison, M.; Landry, R. A New Method of Collective Acquisition of Multiple GNSS Satellite Signals in Challenging Environments; the NAVITEC’2014; ESA/ESTECL: Noordwijk, The Netherlands, 2014. [Google Scholar]
- Esteves, P.; Sahmoudi, M.; Ries, L. Collective Detection of Multi-GNSS Signals: Vector-Acquisition Promises Sensitivity and Reliability Improvement. Inside GNSS Magazine, 20 May/June 2014; 54–65. [Google Scholar]
- Andrianarison, M.; Sahmoudi, M.; Landry, R., Jr. Innovative Techniques for Collective Detection of Multiple GNSS Signals in Challenging Environments. In Proceedings of the 2016 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Alcala de Henares, Madrid, Spain, 4–7 October 2016. [Google Scholar]
- Li, L.; Cheong, J.; Wu, J.; Dempster, A. Improvement to Multi-resolution Collective Detection in GNSS Receivers. J. Navig. 2014, 67, 277–293. [Google Scholar] [CrossRef]
- Andrianarison, M.; Sahmoudi, M.; Landry, R., Jr. Efficient and Innovative Techniques for Collective Acquisition of Weak GNSS Signals. J. Comput. Commun. Spec. Issue Navig. 2017, 5, 84–113. [Google Scholar] [CrossRef]
- Esteves, P. An Innovative and Efficient Frequency Estimation Method for GNSS Signals Acquisition. In Proceedings of the 26th International Technical Meeting of The Satellite Division of the Institute of Navigation (ION GNSS+ 2013), Nashville, TN, USA, 16–20 September 2013. [Google Scholar]
- He, Z.; Renaudin, V.; Petovello, M.; Lachapelle, G. Use of High Sensitivity GNSS Receiver Doppler Measurements for Indoor Pedestrian Dead Reckoning. Sensors 2013, 13, 4303–4326. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Van Diggelen, F. A-GPS: Assisted GPS, GNSS, and SBAS; Artech House Publishers: Boston, MA, USA, 2009. [Google Scholar]
- Andrianarison, M.; Sahmoudi, M.; Landry, R., Jr. New Strategy of Collaborative Acquisition for Connected GNSS Receivers in Deep Urban Environments. J. Position. 2018, 9, 23–46. [Google Scholar] [CrossRef]
- Lesouple, J.; Barbiero, F.; Sahmoudi, M.; Tourneret, J.-Y.; Vigneau, W. Multipath Mitigation for GNSS Positioning in Urban Environment Using Sparse Estimation. IEEE Trans. Intell. Trans. Syst. 2018. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Rx | 14 H | 15 H | 16 H | 17 H | 18 H | Mean Elevation | ||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| SV | El | SV | El | SV | El | SV | El | SV | El | |||
| RS1 | 1 | 37.01 | 1 | 59.36 | 1 | 61.03 | 1 | 43.21 | 45.75 | 50.15 | ||
| 3 | 20.71 | 3 | 35.79 | 37.75 | 28.25 | |||||||
| 6 | 26.51 | 37.00 | 26.51 | |||||||||
| 7 | 55.34 | 7 | 78.33 | 7 | 59.48 | 7 | 21.31 | 46.25 | 53.61 | |||
| 8 | 86.12 | 8 | 60.90 | 8 | 42.19 | 8 | 18.29 | 46.00 | 51.87 | |||
| 9 | 37.01 | 43.25 | 37.01 | |||||||||
| 11 | 28.98 | 11 | 63.24 | 11 | 76.47 | 11 | 51.46 | 11 | 33.47 | 46.00 | 50.72 | |
| 13 | 12.57 | 13 | 16.75 | 34.25 | 14.66 | |||||||
| 16 | 26.87 | 39.75 | 26.87 | |||||||||
| 17 | 18.20 | 17 | 43.12 | 17 | 56.94 | 43.75 | 39.42 | |||||
| 18 | 21.34 | 18 | 24.99 | 18 | 58.91 | 18 | 39.19 | 18 | 21.01 | 40.50 | 33.08 | |
| 19 | 23.54 | 19 | 39.03 | 38.50 | 31.28 | |||||||
| 22 | 27.62 | 22 | 32.46 | 38.50 | 30.04 | |||||||
| 23 | 17.57 | 33.50 | 17.57 | |||||||||
| 24 | 12.59 | 34.00 | 12.59 | |||||||||
| 27 | 51.97 | 27 | 24.34 | 42.75 | 38.15 | |||||||
| 28 | 12.79 | 28 | 34.08 | 28 | 49.03 | 28 | 74.28 | 28 | 80.08 | 46.00 | 50.05 | |
| 30 | 30.98 | 30 | 57.64 | 30 | 67.24 | 30 | 44.17 | 30 | 21.31 | 43.50 | 44.26 | |
| RS2 | 1 | 36.94 | 1 | 59.16 | 1 | 61.01 | 1 | 43.03 | 45.50 | 50.03 | ||
| 3 | 20.64 | 3 | 35.88 | 37.75 | 28.26 | |||||||
| 6 | 26.03 | 36.75 | 26.03 | |||||||||
| 7 | 55.32 | 7 | 78.17 | 7 | 59.27 | 7 | 21.17 | 46.25 | 53.48 | |||
| 8 | 86.09 | 8 | 60.54 | 8 | 42.01 | 8 | 18.09 | 46.00 | 51.68 | |||
| 9 | 36.97 | 43.25 | 36.97 | |||||||||
| 11 | 28.95 | 11 | 63.20 | 11 | 76.36 | 11 | 51.27 | 11 | 33.21 | 45.50 | 50.59 | |
| 13 | 12.34 | 13 | 16.49 | 34.00 | 14.41 | |||||||
| 16 | 26.72 | 39.75 | 26.72 | |||||||||
| 17 | 18.07 | 17 | 43.05 | 17 | 56.18 | 43.50 | 39.10 | |||||
| 18 | 21.14 | 18 | 24.87 | 18 | 58.89 | 18 | 39.09 | 18 | 21.17 | 40.00 | 33.03 | |
| 19 | 23.47 | 19 | 39.01 | 38.50 | 31.24 | |||||||
| 22 | 27.59 | 22 | 32.29 | 38.25 | 29.94 | |||||||
| 23 | 17.37 | 33.25 | 17.37 | |||||||||
| 24 | 12.33 | 34.00 | 12.33 | |||||||||
| 27 | 51.67 | 27 | 24.26 | 42.75 | 37.96 | |||||||
| 28 | 12.42 | 28 | 34.01 | 28 | 49.00 | 28 | 74.23 | 28 | 79.78 | 45.75 | 49.88 | |
| 30 | 30.69 | 30 | 57.39 | 30 | 67.21 | 30 | 44.15 | 30 | 21.10 | 43.75 | 44.10 | |
| MS | 1 | 36.95 | 1 | 58.99 | 1 | 60.85 | 1 | 43.02 | 45.75 | 49.95 | ||
| 3 | 34.78 | 37.50 | 34.78 | |||||||||
| 6 | 25.89 | 36.75 | 25.89 | |||||||||
| 7 | 54.94 | 7 | 77.69 | 7 | 58.88 | 7 | 21.02 | 41.25 | 53.13 | |||
| 8 | 86.02 | 8 | 60.23 | 8 | 41.76 | 8 | 17.79 | 39.00 | 51.45 | |||
| 11 | 28.75 | 11 | 62.95 | 11 | 76.12 | 11 | 51.06 | 11 | 32.87 | 37.50 | 50.35 | |
| 17 | 18.00 | 17 | 42.84 | 17 | 56.43 | 41.75 | 39.09 | |||||
| 19 | 23.17 | 19 | 38.87 | 37.50 | 31.02 | |||||||
| 22 | 27.33 | 22 | 32.22 | 36.25 | 29.77 | |||||||
| 27 | 51.63 | 27 | 23.77 | 43.75 | 37.70 | |||||||
| 28 | 12.40 | 28 | 33.68 | 28 | 48.27 | 28 | 73.87 | 28 | 79.74 | 42.75 | 49.59 | |
| 30 | 30.21 | 30 | 57.10 | 30 | 66.59 | 30 | 43.75 | 30 | 21.02 | 39.75 | 43.73 | |
| Item | Rough 1st Iteration | Medium 2nd Iteration | Fine 3rd Iteration | |
|---|---|---|---|---|
| Horizontal dimension | Radial Uncertainty [m] | ±10,000 | ±2922 | ±292 |
| Radial Step Size [m] | 2922 | 292 | 29.2 | |
| Angular Step size [°] | 14.4 | 5.7 | 5.7 | |
| Clock Bias | Clock Bias Uncertainty [m] | ±150,000 | ±220 | ±22 |
| Clock Bias Step Size [m] | 440 | 44 | 4.4 | |
| RS | Best RS | All RS | |
|---|---|---|---|
| Satellite | |||
| Best Satellites | less sensitive less complex | less sensitive more complex | |
| All Satellites | more sensitive less complex | more sensitive more complex | |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Andrianarison, M.; Landry, R., Jr. New Approach of High Sensitivity Techniques Using Collective Detection Method with Multiple GNSS Receivers. Sensors 2018, 18, 3690. https://doi.org/10.3390/s18113690
Andrianarison M, Landry R Jr. New Approach of High Sensitivity Techniques Using Collective Detection Method with Multiple GNSS Receivers. Sensors. 2018; 18(11):3690. https://doi.org/10.3390/s18113690
Chicago/Turabian StyleAndrianarison, Maherizo, and René Landry, Jr. 2018. "New Approach of High Sensitivity Techniques Using Collective Detection Method with Multiple GNSS Receivers" Sensors 18, no. 11: 3690. https://doi.org/10.3390/s18113690
APA StyleAndrianarison, M., & Landry, R., Jr. (2018). New Approach of High Sensitivity Techniques Using Collective Detection Method with Multiple GNSS Receivers. Sensors, 18(11), 3690. https://doi.org/10.3390/s18113690