A Reliable Health Indicator for Fault Prognosis of Bearings

 ,
,  ,
, 
Abstract
:1. Introduction
- 1)
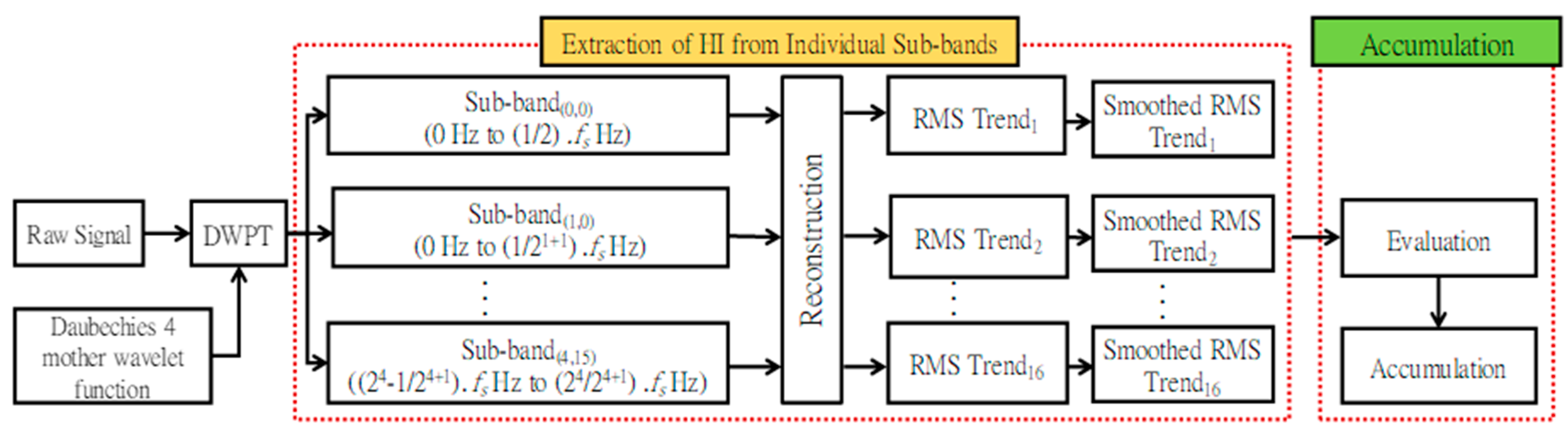
- A novel method is proposed to construct a bearing HI through sub-band analysis of the vibration acceleration signals, which are inherently nonstationary and require analysis at different resolutions in the time-frequency domain to capture the maximum amount of information related to bearing degradation. An HI that is calculated for the entire raw signal fails to capture this information. Alternatively, decomposing the signal into different sub-bands enables analysis and selection of the best available information that is related to bearing degradation from individual sub-bands.
- 2)
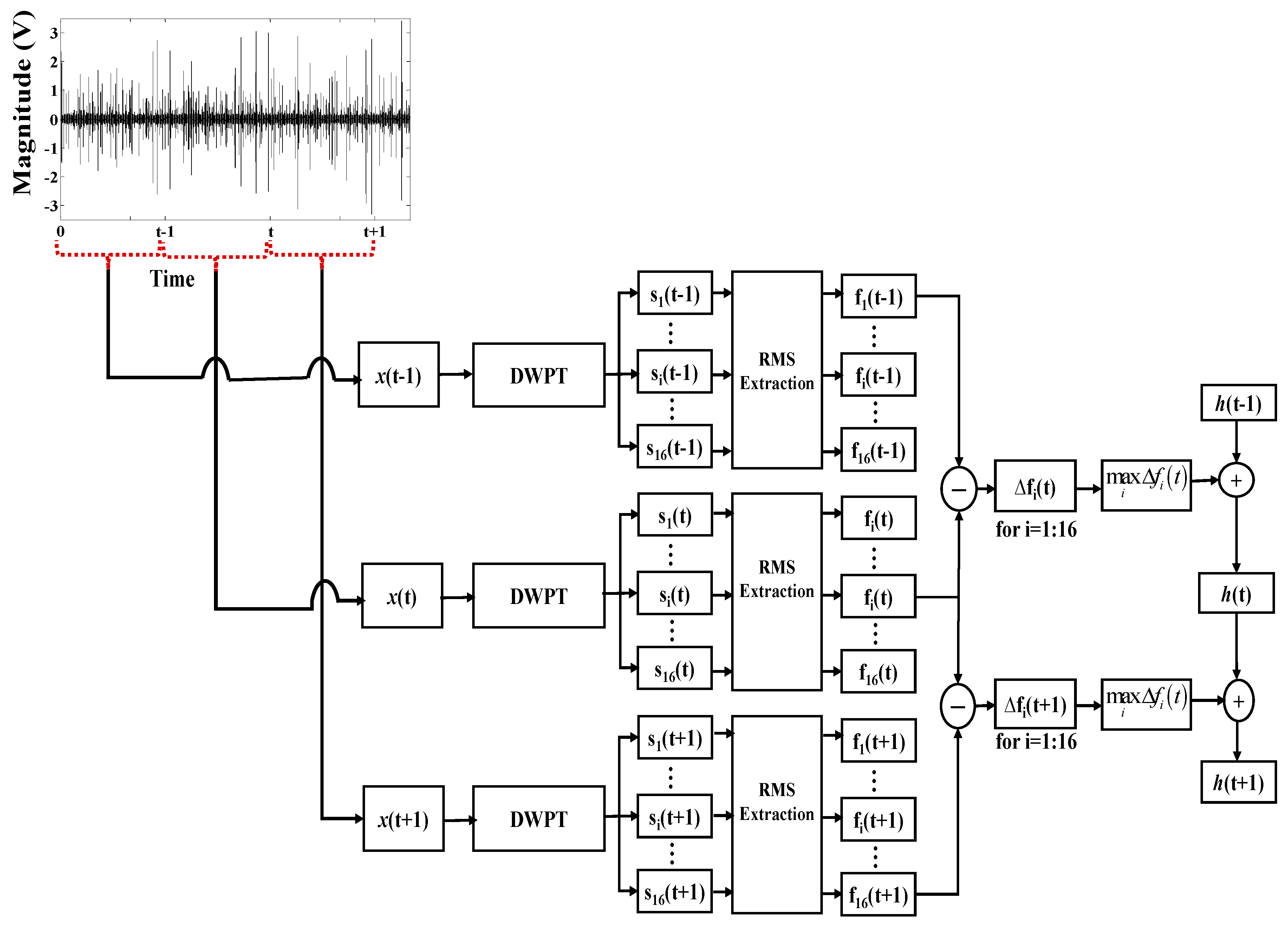
- A gradient-based metric is proposed to evaluate the HI extracted from individual sub-bands at each time index. The sub-bands that exhibit the best trend in terms of the proposed metric are then selected to construct an optimal HI that can be used to infer a bearing’s health and estimate its RUL.
- 3)
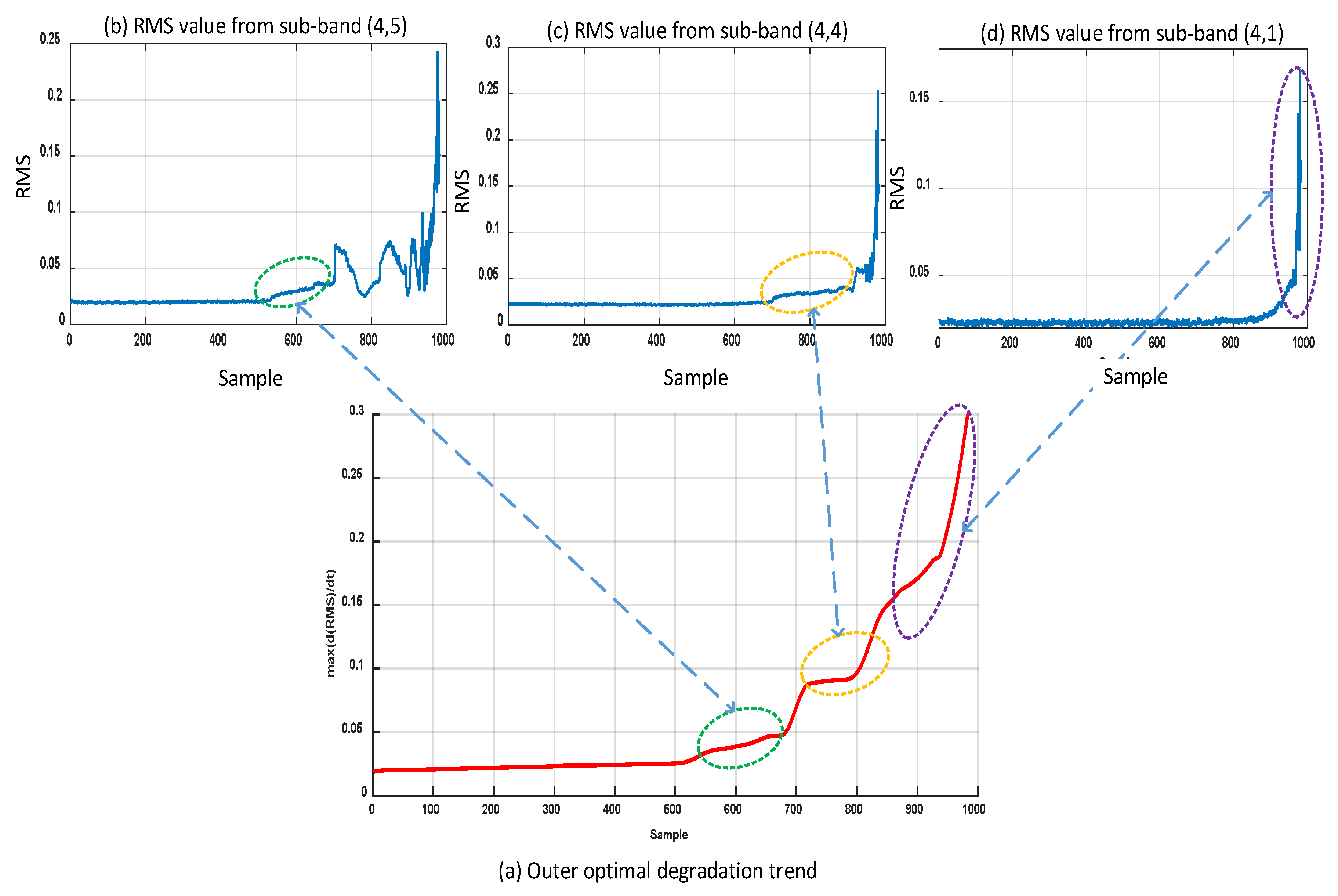
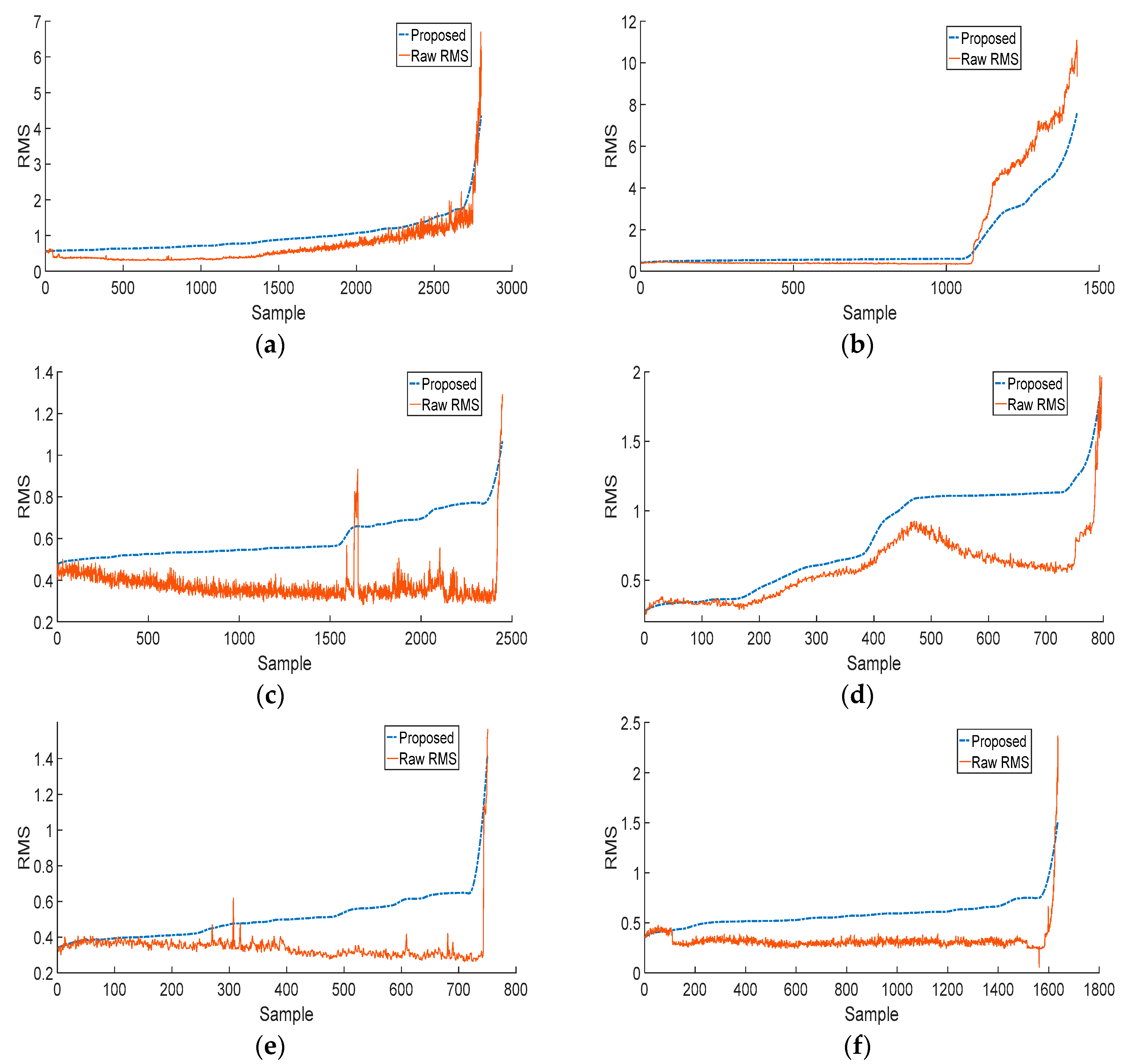
- The proposed method yields an HI that monotonically increases and is robust to random fluctuations and noise. The RMS value is used as the HI; it is calculated using a novel method and can be used to infer the true level of physical degradation in the bearing and estimate its RUL.
2. Accelerated Bearing Degradation Test Data
3. Proposed Methodology for the Construction of a Bearing Health Indicator
3.1. Extraction of a Health Indicator from Individual Sub-Bands
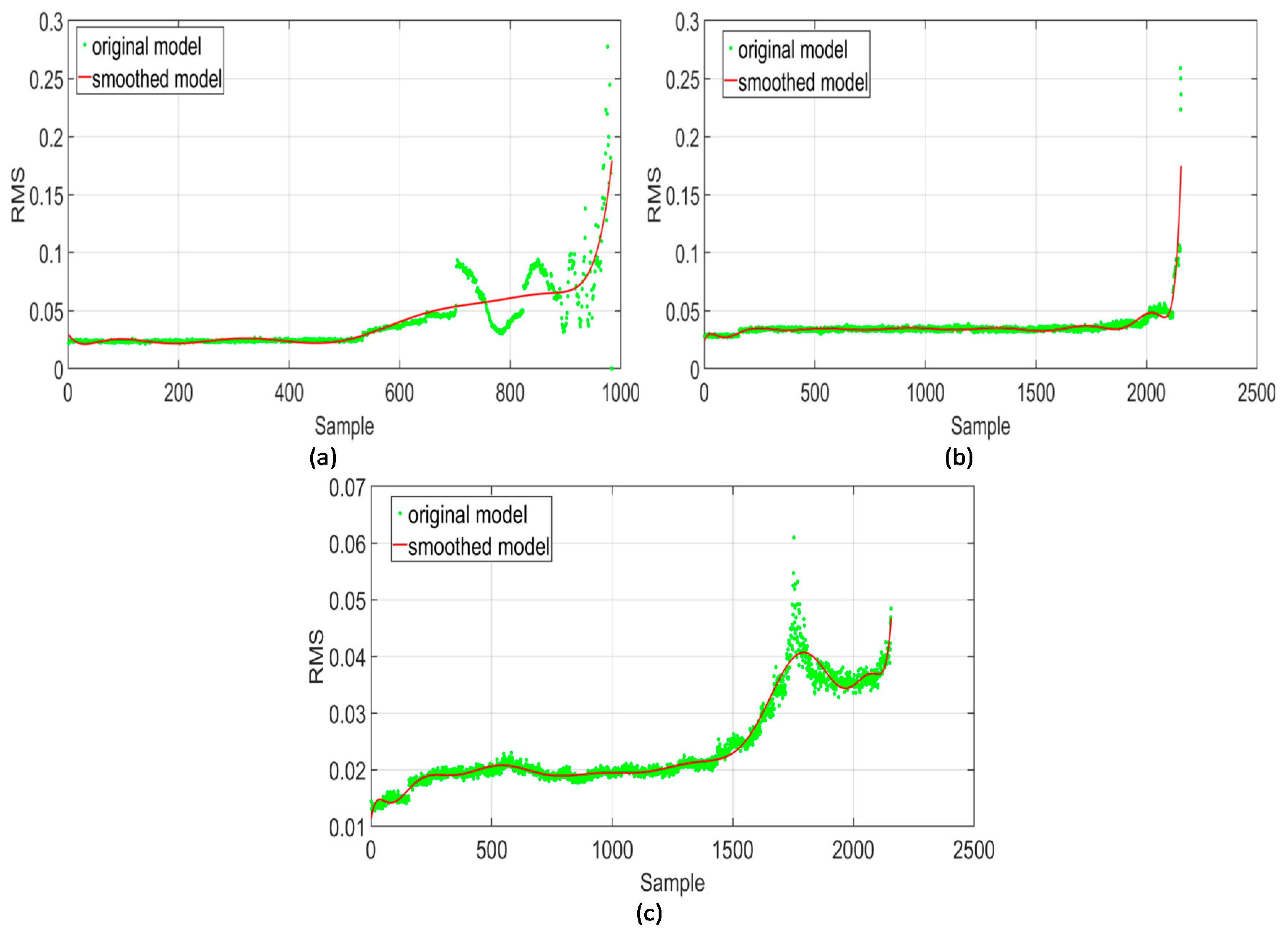
3.2. Smoothing of the Health Indicator
3.3. Evaluation and Accumulation of Health Indicators from Individual Sub-Bands
4. Results and Discussion
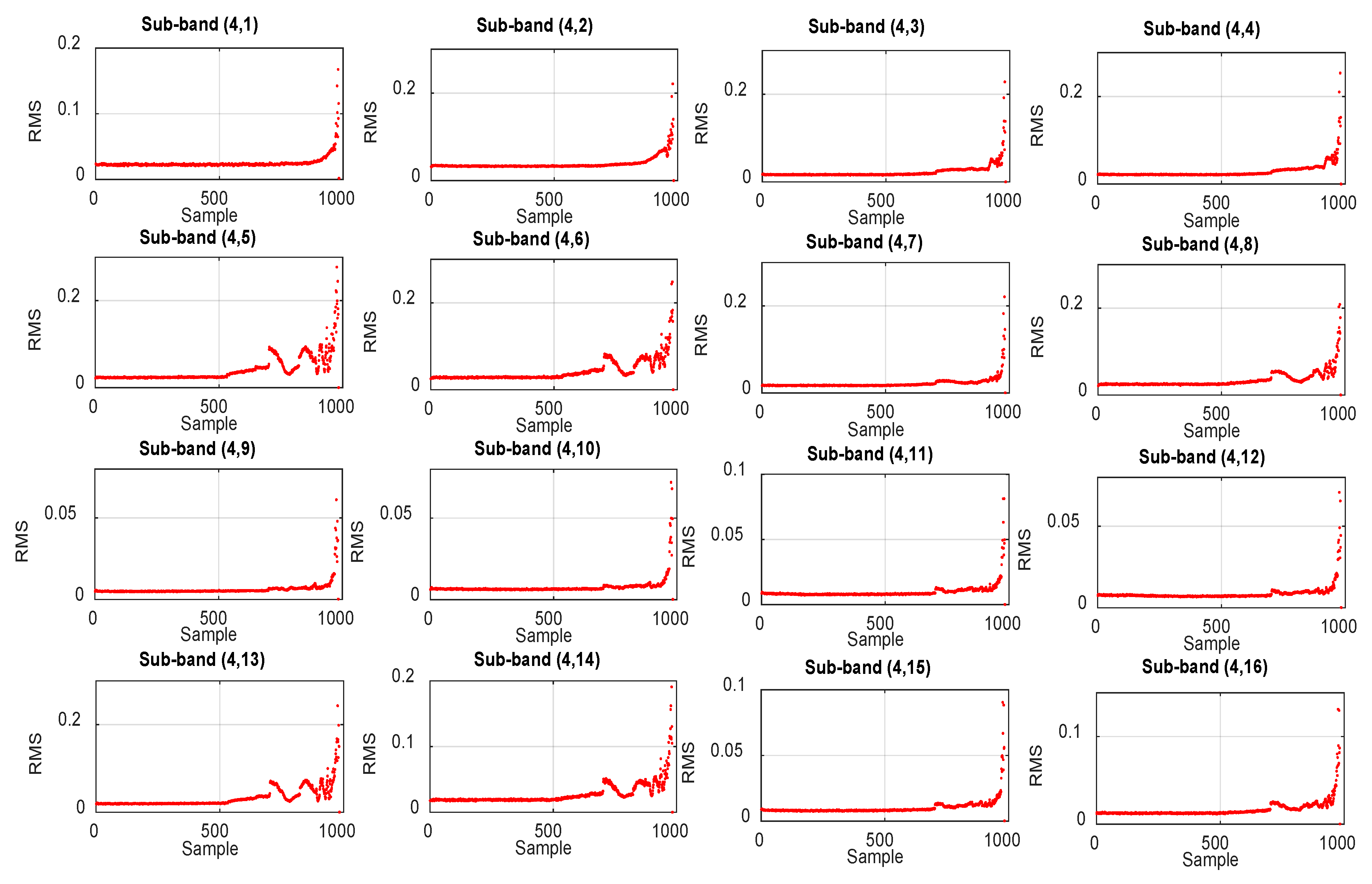
4.1. HI Trends for the IMS Dataset
4.2. Effect of Smoothing on the RMS Trends
4.3. HI Trends for the PRONOSTIA Dataset
4.4. Quantitative Evaluation of the Proposed Health Indicator
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Yu, M.; Wang, D.; Luo, M.; Huang, L. Prognosis of Hybrid Systems with Multiple Incipient Faults: Augmented Global Analytical Redundancy Relations Approach. IEEE Trans. Syst. Man Cybern. Part A Syst. Hum. 2011, 41, 540–551. [Google Scholar] [CrossRef]
- Ahmad, W.; Khan, S.A.; Kim, J. A Hybrid Prognostics Technique for Rolling Element Bearings Using Adaptive Predictive Models. IEEE Trans. Ind. Electron. 2018, 65, 1577–1584. [Google Scholar] [CrossRef]
- Jin, X.; Sun, Y.; Que, Z.; Wang, Y.; Chow, T.W.S. Anomaly Detection and Fault Prognosis for Bearings. IEEE Trans. Instrum. Meas. 2016, 65, 2046–2054. [Google Scholar] [CrossRef]
- Elforjani, M.; Shanbr, S. Prognosis of Bearing Acoustic Emission Signals Using Supervised Machine Learning. IEEE Trans. Ind. Electron. 2018, 65, 5864–5871. [Google Scholar] [CrossRef]
- Javed, K.; Gouriveau, R.; Zerhouni, N.; Nectoux, P. Enabling Health Monitoring Approach Based on Vibration Data for Accurate Prognostics. IEEE Trans. Ind. Electron. 2015, 62, 647–656. [Google Scholar] [CrossRef] [Green Version]
- Lei, Y.; Li, N.; Gontarz, S.; Lin, J.; Radkowski, S.; Dybala, J. A Model-Based Method for Remaining Useful Life Prediction of Machinery. IEEE Trans. Reliab. 2016, 65, 1314–1326. [Google Scholar] [CrossRef]
- Lei, Y.; Li, N.; Guo, L.; Li, N.; Yan, T.; Lin, J. Machinery health prognostics: A systematic review from data acquisition to RUL prediction. Mech. Syst. Signal Process. 2018, 104, 799–834. [Google Scholar] [CrossRef]
- Li, N.; Lei, Y.; Lin, J.; Ding, S.X. An Improved Exponential Model for Predicting Remaining Useful Life of Rolling Element Bearings. IEEE Trans. Ind. Electron. 2015, 62, 7762–7773. [Google Scholar] [CrossRef]
- Deutsch, J.; He, D. Using Deep Learning-Based Approach to Predict Remaining Useful Life of Rotating Components. IEEE Trans. Syst. Man Cybern. Syst. 2018, 48, 11–20. [Google Scholar] [CrossRef]
- Thorsen, O.V.; Dalva, M. Failure identification and analysis for high-voltage induction motors in the petrochemical industry. IEEE Trans. Ind. Appl. 1999, 35, 810–818. [Google Scholar] [CrossRef]
- Duong, B.P.; Kim, J.-M. Non-Mutually Exclusive Deep Neural Network Classifier for Combined Modes of Bearing Fault Diagnosis. Sensors 2018, 18, 1129. [Google Scholar] [CrossRef] [PubMed]
- Soualhi, A.; Razik, H.; Clerc, G.; Doan, D.D. Prognosis of Bearing Failures Using Hidden Markov Models and the Adaptive Neuro-Fuzzy Inference System. IEEE Trans. Ind. Electron. 2014, 61, 2864–2874. [Google Scholar] [CrossRef]
- Singleton, R.K.; Strangas, E.G.; Aviyente, S. Extended Kalman Filtering for Remaining-Useful-Life Estimation of Bearings. IEEE Trans. Ind. Electron. 2015, 62, 1781–1790. [Google Scholar] [CrossRef]
- Saxena, A.; Celaya, J.; Saha, B.; Saha, S.; Goebel, K. On Applying the Prognostic Performance Metrics. In Proceedings of the Annual Conference of the Prognostics and Health Management Society, San Diego, CA, USA, 27 September–1 October 2009. [Google Scholar]
- Saxena, S.; Celaya, J.; Saha, B.; Saha, S.; Goebel, K. Metrics for offline evaluation of prognostic performance. Int. J. Progn. Health Manag. 2010, 1, 4–23. [Google Scholar]
- Qiu, H.; Lee, J.; Yu, G.; Lin, J. Bearing Data Set; NASA Ames Prognostics Data Repository; NASA Ames Research Center: Moffett Field, CA, USA, 2007. [Google Scholar]
- Qiu, H.; Lee, J.; Lin, J.; Yu, G. Wavelet filter-based weak signature detection method and its application on rolling element bearing prognostics. J. Sound Vib. 2006, 289, 1066–1090. [Google Scholar] [CrossRef]
- Medjaher, K.; Zerhouni, N.; Baklouti, J. Data-driven prognostics based on health indicator construction: Application to PRONOSTIA’s data. In Proceedings of the 2013 European Control Conference (ECC), Zurich, Switzerland, 17–19 July 2013; pp. 1451–1456. [Google Scholar]
- Nectoux, P.; Gouriveau, R.; Medjaher, K.; Ramasso, E.; Morello, B.C.; Zerhouni, N. PRONOSTIA: An Experimental Platform for Bearings Accelerated Degradation Tests. In Proceedings of the IEEE International Conference on Prognostics and Health Management (PHM’12), Beijing, China, 18–21 June 2012; pp. 1–8. [Google Scholar]
- Liu, K.; Gebraeel, N.Z.; Shi, J. A Data-Level Fusion Model for Developing Composite Health Indices for Degradation Modeling and Prognostic Analysis. IEEE Trans. Autom. Sci. Eng. 2013, 10, 652–664. [Google Scholar] [CrossRef]
- Tse, P.W.; Wang, D. Enhancing the abilities in assessing slurry pumps’ performance degradation and estimating their remaining useful lives by using captured vibration signals. J. Vib. Control 2017, 23, 1925–1937. [Google Scholar] [CrossRef]
- Liao, L. Discovering Prognostic Features Using Genetic Programming in Remaining Useful Life Prediction. IEEE Trans. Ind. Electron. 2014, 61, 2464–2472. [Google Scholar] [CrossRef]
- Ahmad, W.; Ali Khan, S.; Kim, J.-M. Estimating the remaining useful life of bearings using a neuro-local linear estimator-based method. J. Acoust. Soc. Am. 2017, 141, EL452–EL457. [Google Scholar] [CrossRef] [PubMed]
- Lu, S.; He, Q.; Wang, J. A review of stochastic resonance in rotating machine fault detection. Mech. Syst. Signal Process. 2019, 116, 230–260. [Google Scholar] [CrossRef]
- Lu, S.; He, Q.; Zhang, H.; Kong, F. Rotating machine fault diagnosis through enhanced stochastic resonance by full-wave signal construction. Mech. Syst. Signal Process. 2017, 85, 82–97. [Google Scholar] [CrossRef]
- Lei, Y.; Li, N.; Lin, J. A New Method Based on Stochastic Process Models for Machine Remaining Useful Life Prediction. IEEE Trans. Instrum. Meas. 2016, 65, 2671–2684. [Google Scholar] [CrossRef]
- Guo, L.; Li, N.; Jia, F.; Lei, Y.; Lin, J. A recurrent neural network based health indicator for remaining useful life prediction of bearings. Neurocomputing 2017, 240, 98–109. [Google Scholar] [CrossRef]
- Malhi, A.; Yan, R.; Gao, R.X. Prognosis of Defect Propagation Based on Recurrent Neural Networks. IEEE Trans. Instrum. Meas. 2011, 60, 703–711. [Google Scholar] [CrossRef]
- Zhang, Z.; Si, X.; Hu, C. An Age- and State-Dependent Nonlinear Prognostic Model for Degrading Systems. IEEE Trans. Reliab. 2015, 64, 1214–1228. [Google Scholar] [CrossRef]
- Li, H.; Wang, Y.; Wang, B.; Sun, J.; Li, Y. The application of a general mathematical morphological particle as a novel indicator for the performance degradation assessment of a bearing. Mech. Syst. Signal Process. 2017, 82, 490–502. [Google Scholar] [CrossRef]
- Loutas, T.H.; Roulias, D.; Georgoulas, G. Remaining Useful Life Estimation in Rolling Bearings Utilizing Data-Driven Probabilistic E-Support Vectors Regression. IEEE Trans. Reliab. 2013, 62, 821–832. [Google Scholar] [CrossRef]
- Wang, D.; Tsui, K.; Miao, Q. Prognostics and Health Management: A Review of Vibration Based Bearing and Gear Health Indicators. IEEE Access 2018, 6, 665–676. [Google Scholar] [CrossRef]
- Randall, R.B.; Antoni, J. Rolling element bearing diagnostics—A tutorial. Mech. Syst. Signal Process. 2011, 25, 485–520. [Google Scholar] [CrossRef]
- Kang, M.; Kim, J.; Wills, L.M.; Kim, J. Time-Varying and Multiresolution Envelope Analysis and Discriminative Feature Analysis for Bearing Fault Diagnosis. IEEE Trans. Ind. Electron. 2015, 62, 7749–7761. [Google Scholar] [CrossRef]
- Cui, L.; Li, B.; Ma, J.; Jin, Z. Quantitative trend fault diagnosis of a rolling bearing based on Sparsogram and Lempel-Ziv. Measurement 2018, 128, 410–418. [Google Scholar] [CrossRef]
- Kang, M.; Kim, J.; Jeong, I.; Kim, J.; Pecht, M. A Massively Parallel Approach to Real-Time Bearing Fault Detection Using Sub-Band Analysis on an FPGA-Based Multicore System. IEEE Trans. Ind. Electron. 2016, 63, 6325–6335. [Google Scholar] [CrossRef]
- Song, L.; Wang, H.; Chen, P. Vibration-Based Intelligent Fault Diagnosis for Roller Bearings in Low-Speed Rotating Machinery. IEEE Trans. Instrum. Meas. 2018, 67, 1887–1899. [Google Scholar] [CrossRef]
- Wickerhauser, M.V. Lectures on Wavelet Packet Algorithms. In Proceedings of the Ondelettes et Paquets d’Ondes, Roquencourt, France, 17–21 June 1991; pp. 31–99. [Google Scholar]
- Mallat, S.G. A theory for multiresolution signal decomposition: The wavelet representation. IEEE Trans. Pattern Anal. Mach. Intell. 1989, 11, 674–693. [Google Scholar] [CrossRef]
- Teotrakool, K.; Devaney, M.J.; Eren, L. Adjustable-Speed Drive Bearing-Fault Detection via Wavelet Packet Decomposition. IEEE Trans. Instrum. Meas. 2009, 58, 2747–2754. [Google Scholar] [CrossRef]
- Eren, L.; Teotrakool, K.; Devaney, M.J. Bearing Fault Detection via Wavelet Packet Decomposition with Spectral Post Processing. In Proceedings of the IEEE Instrumentation Measurement Technology Conference IMTC, Warsaw, Poland, 1–3 May 2007; pp. 1–4. [Google Scholar]
- Ye, Z.; Wu, B.; Sadeghian, A. Current signature analysis of induction motor mechanical faults by wavelet packet decomposition. IEEE Trans. Ind. Electron. 2003, 50, 1217–1228. [Google Scholar]
- Cleveland, W.S.; Devlin, S.J. Locally Weighted Regression: An Approach to Regression Analysis by Local Fitting. J. Am. Stat. Assoc. 1988, 83, 596–610. [Google Scholar] [CrossRef]
- Zhang, B.; Zhang, L.; Xu, J. Degradation Feature Selection for Remaining Useful Life Prediction of Rolling Element Bearings. Qual. Reliab. Eng. Int. 2016, 32, 547–554. [Google Scholar] [CrossRef]
- Li, N.; Lei, Y.; Liu, Z.; Lin, J. A particle filtering-based approach for remaining useful life predication of rolling element bearings. In Proceedings of the International Conference on Prognostics and Health Management, Cheney, WA, USA, 22–25 June 2014; pp. 1–8. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| S. No. | Bearing | Health Indicators | ||
|---|---|---|---|---|
| Traditional RMS | Variance | Proposed | ||
| 1 | IMS Outer | 0.0132 | 0.001 | 0.9868 |
| 2 | IMS Inner | 0.0144 | 0.0292 | 0.9133 |
| 3 | IMS Roller | 4.64 × 10−4 | 2.09 × 10−2 | 0.9995 |
| 4 | PRONOSTIA b11 | 0.0071 | 0.0093 | 0.9925 |
| 5 | PRONOSTIA b13 | 0.0152 | 0.4278 | 0.9836 |
| 6 | PRONOSTIA b14 | 3.99 × 10−2 | 4.29 × 10−1 | 0.9629 |
| 7 | PRONOSTIA b15 | 8.12 × 10−4 | 3.48 × 10−1 | 0.9736 |
| 8 | PRONOSTIA b16 | 0.0037 | 0.3509 | 0.9163 |
| 9 | PRONOSTIA b17 | 0.0053 | 0.378 | 0.9588 |
| 10 | PRONOSTIA b22 | 0.0402 | 0.0402 | 0.9686 |
| 11 | PRONOSTIA b23 | 0.0082 | 0.3335 | 0.9043 |
| 12 | PRONOSTIA b24 | 0.0027 | 0.3675 | 0.9694 |
| 13 | PRONOSTIA b25 | 0.0147 | 0.3323 | 0.9883 |
| 14 | PRONOSTIA b26 | 0.0057 | 0.2767 | 0.9472 |
| 15 | PRONOSTIA b27 | 0.0565 | 0.2826 | 0.9609 |
| 16 | PRONOSTIA b32 | 0.0073 | 0.0024 | 0.9383 |
| 17 | PRONOSTIA b33 | 0.0438 | 0.4539 | 0.9977 |
| S. No. | Bearing | Health Indicators | ||
|---|---|---|---|---|
| Traditional RMS | Variance | Proposed | ||
| 1 | IMS Outer | 0.9487 | 0.944 | 0.9958 |
| 2 | IMS Inner | 0.9685 | 0.9586 | 0.9954 |
| 3 | IMS Roller | 0.9754 | 0.9737 | 0.9947 |
| 4 | PRONOSTIA b11 | 0.9467 | 0.8936 | 0.9968 |
| 5 | PRONOSTIA b13 | 0.9362 | 0.8702 | 0.9968 |
| 6 | PRONOSTIA b14 | 0.962 | 0.8181 | 0.9974 |
| 7 | PRONOSTIA b15 | 0.9675 | 0.9448 | 0.9982 |
| 8 | PRONOSTIA b16 | 0.9347 | 0.8825 | 0.9981 |
| 9 | PRONOSTIA b17 | 0.9635 | 0.8563 | 0.9983 |
| 10 | PRONOSTIA b22 | 0.9699 | 0.9395 | 0.9979 |
| 11 | PRONOSTIA b23 | 0.9073 | 0.8735 | 0.9924 |
| 12 | PRONOSTIA b24 | 0.9478 | 0.7794 | 0.9971 |
| 13 | PRONOSTIA b25 | 0.9446 | 0.9172 | 0.9985 |
| 14 | PRONOSTIA b26 | 0.9611 | 0.9431 | 0.9981 |
| 15 | PRONOSTIA b27 | 0.9402 | 0.9112 | 0.9947 |
| 16 | PRONOSTIA b32 | 0.9352 | 0.8618 | 0.9974 |
| 17 | PRONOSTIA b33 | 0.9622 | 0.8908 | 0.9983 |
| S.No. | Bearing | Health Indicators | ||
|---|---|---|---|---|
| Traditional RMS | Variance | Proposed | ||
| 1 | IMS Outer | 0.668 | 0.3965 | 0.8131 |
| 2 | IMS Inner | 0.3882 | 0.2689 | 0.7833 |
| 3 | IMS Roller | 0.8465 | 0.7931 | 0.9572 |
| 4 | PRONOSTIA b11 | 0.6798 | 0.3792 | 0.7819 |
| 5 | PRONOSTIA b13 | 0.55 | 0.8353 | 0.6793 |
| 6 | PRONOSTIA b14 | 0.7095 | 0.7156 | 0.7158 |
| 7 | PRONOSTIA b15 | −0.1582 | −0.4051 | 0.6654 |
| 8 | PRONOSTIA b16 | −0.0922 | −0.2725 | 0.9 |
| 9 | PRONOSTIA b17 | 0.336 | 0.4472 | 0.8316 |
| 10 | PRONOSTIA b22 | 0.745 | 0.5847 | 0.9623 |
| 11 | PRONOSTIA b23 | 0.0211 | −0.4844 | 0.4235 |
| 12 | PRONOSTIA b24 | −0.0938 | −0.3742 | 0.8288 |
| 13 | PRONOSTIA b25 | −0.6617 | −0.7458 | 0.9304 |
| 14 | PRONOSTIA b26 | −0.0114 | −0.2822 | 0.6057 |
| 15 | PRONOSTIA b27 | 0.248 | 0.2095 | 0.4489 |
| 16 | PRONOSTIA b32 | 0.1087 | 0.1468 | 0.8077 |
| 17 | PRONOSTIA b33 | 0.6403 | 0.6584 | 0.8543 |
| Method | Bearing 11 | Bearing 13 | Bearing 14 | Bearing 15 |
|---|---|---|---|---|
| Paris Model | 0.6967 | 0.6074 | 0.6317 | 0.7443 |
| Exponential Model | 0.7111 | 0.5311 | 0.5420 | 0.7463 |
| Improved Exponential Model | 0.8696 | 0.7623 | 0.8712 | 0.9324 |
| Adaptive Predictive Model | 0.9362 | 0.9003 | 0.9608 | 0.7790 |
| Proposed | 0.9395 | 0.9287 | 0.7623 | 0.9547 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Duong, B.P.; Khan, S.A.; Shon, D.; Im, K.; Park, J.; Lim, D.-S.; Jang, B.; Kim, J.-M. A Reliable Health Indicator for Fault Prognosis of Bearings. Sensors 2018, 18, 3740. https://doi.org/10.3390/s18113740
Duong BP, Khan SA, Shon D, Im K, Park J, Lim D-S, Jang B, Kim J-M. A Reliable Health Indicator for Fault Prognosis of Bearings. Sensors. 2018; 18(11):3740. https://doi.org/10.3390/s18113740
Chicago/Turabian StyleDuong, Bach Phi, Sheraz Ali Khan, Dongkoo Shon, Kichang Im, Jeongho Park, Dong-Sun Lim, Byungtae Jang, and Jong-Myon Kim. 2018. "A Reliable Health Indicator for Fault Prognosis of Bearings" Sensors 18, no. 11: 3740. https://doi.org/10.3390/s18113740
APA StyleDuong, B. P., Khan, S. A., Shon, D., Im, K., Park, J., Lim, D.-S., Jang, B., & Kim, J.-M. (2018). A Reliable Health Indicator for Fault Prognosis of Bearings. Sensors, 18(11), 3740. https://doi.org/10.3390/s18113740