Estimating Three-Dimensional Body Orientation Based on an Improved Complementary Filter for Human Motion Tracking

Abstract
:1. Introduction
- A complementary filter whose fusion coefficient is auto-tuned by a predetermined function is designed for real-time human segment orientation tracking;
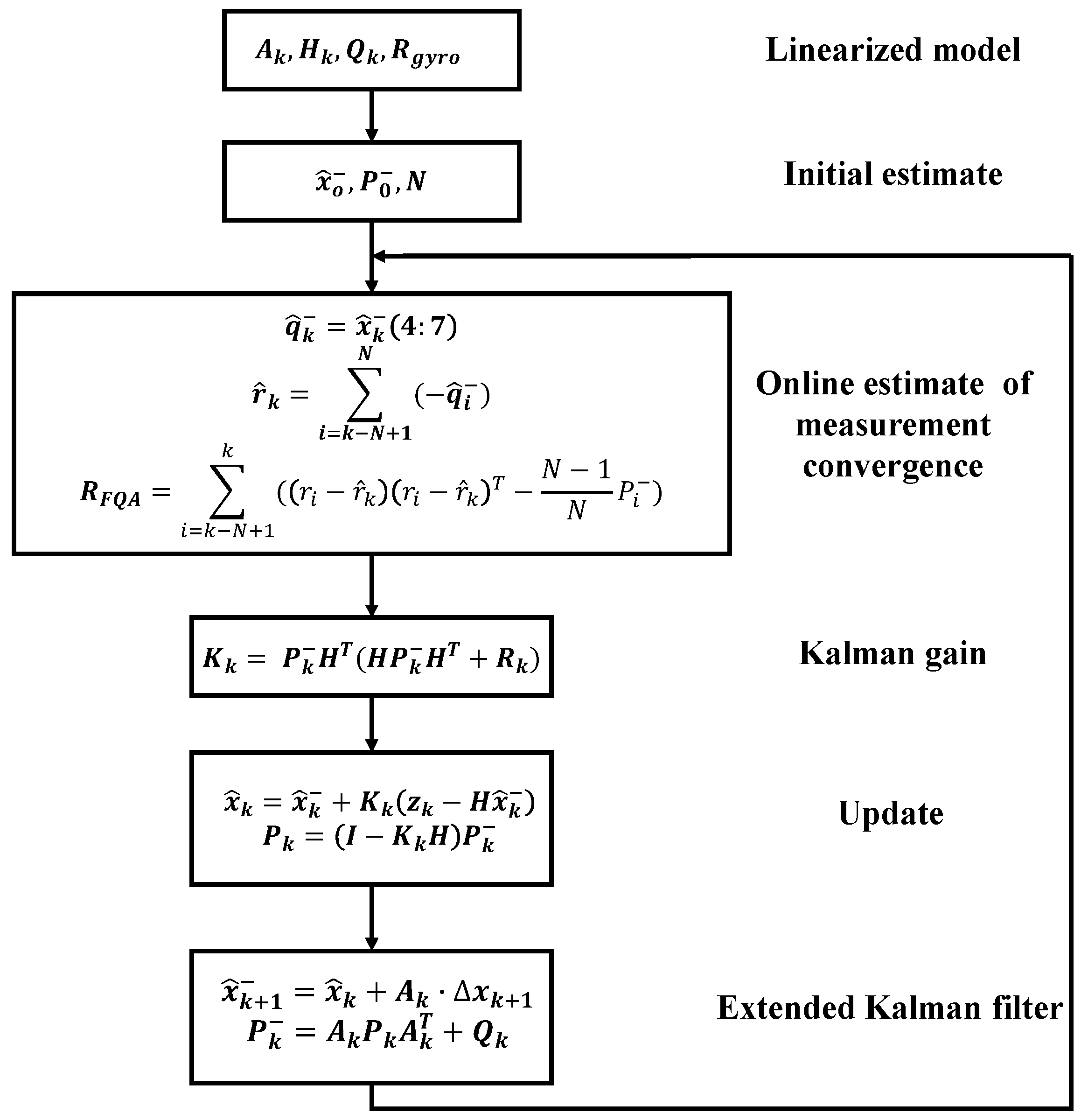
- An adaptive Kalman filter based on [7] is designed for online estimating the measurement convergence;
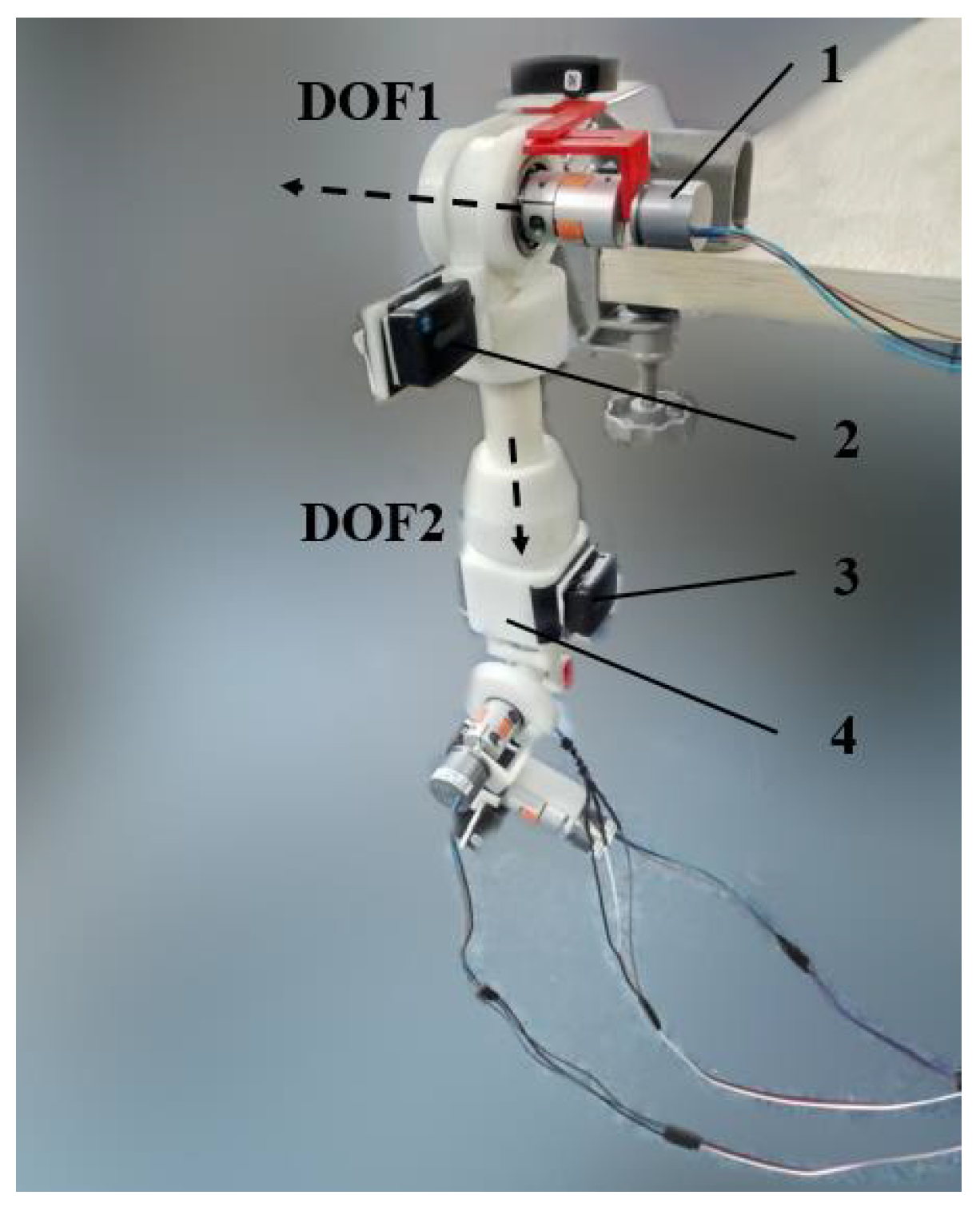
- The performance of two algorithms stated above is validated on an especially designed test platform to make a comparison with the performance of some previously existing algorithms.
2. Related Work
2.1. Angular Rate Integration
2.2. Vector Observation
2.3. Data Fusion-Based Algorithms
2.3.1. Kalman Filter
2.3.2. Complementary Filter
3. Method
3.1. Factored Quaternion Algorithm (FQA)
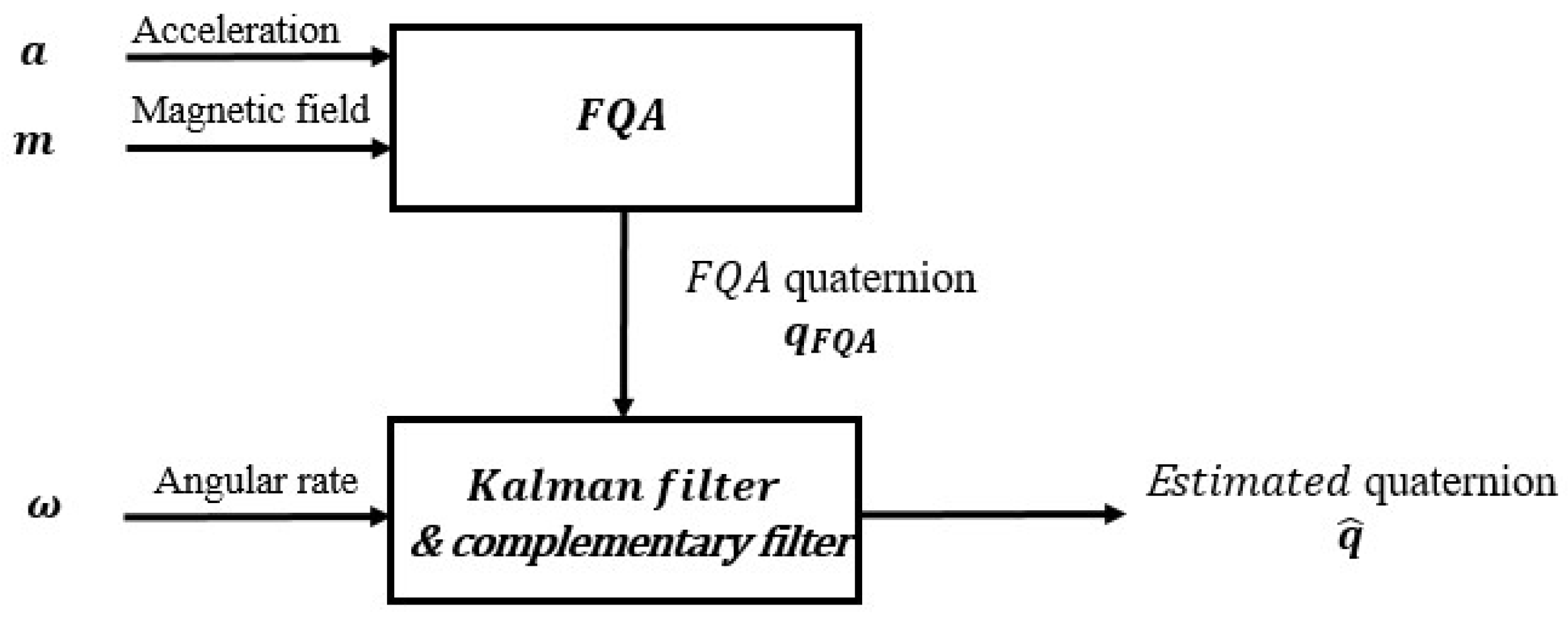
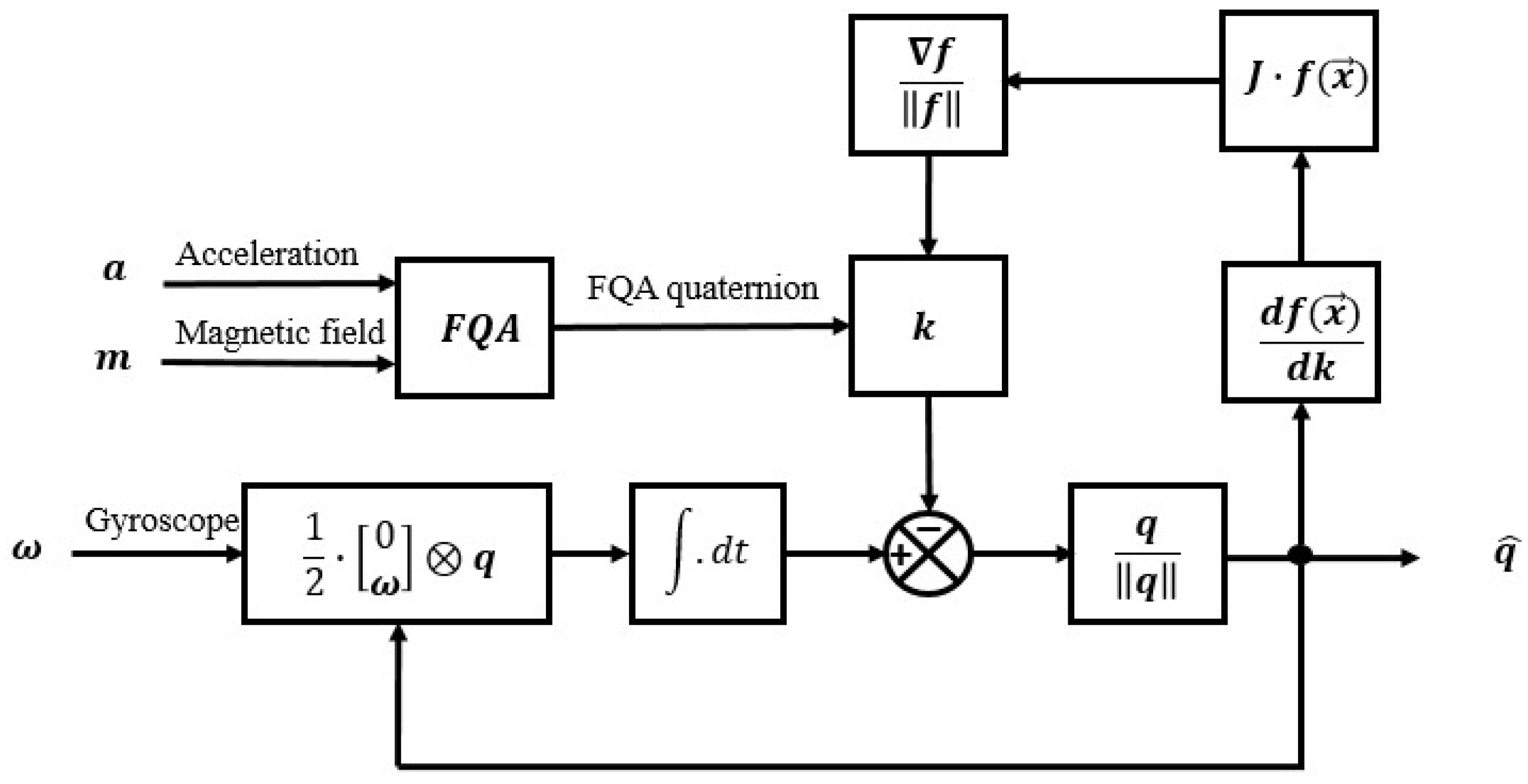
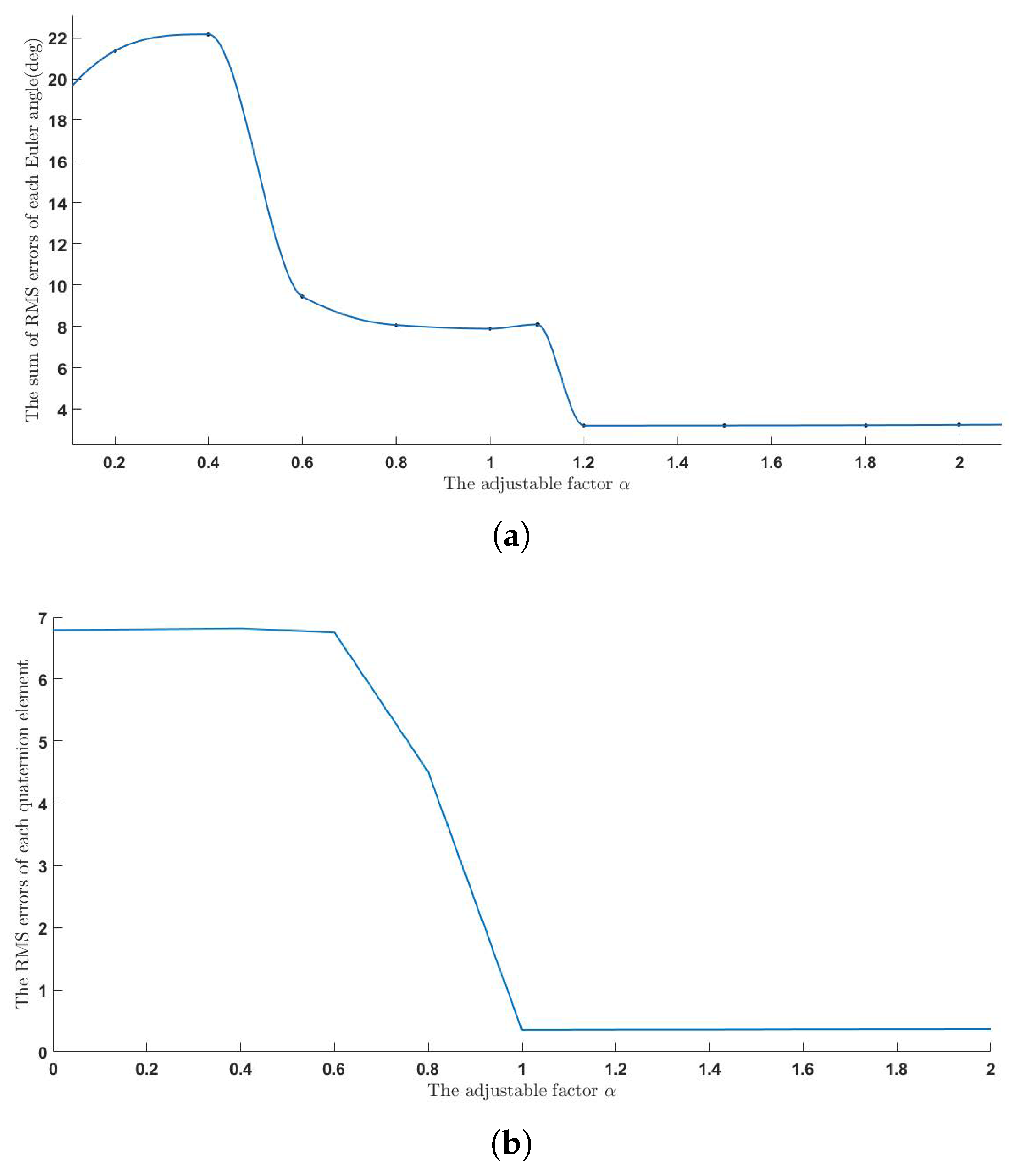
3.2. An Automatic Coefficient-Tuning Complementary Filter
3.3. Kalman Filter Design
4. Experiment
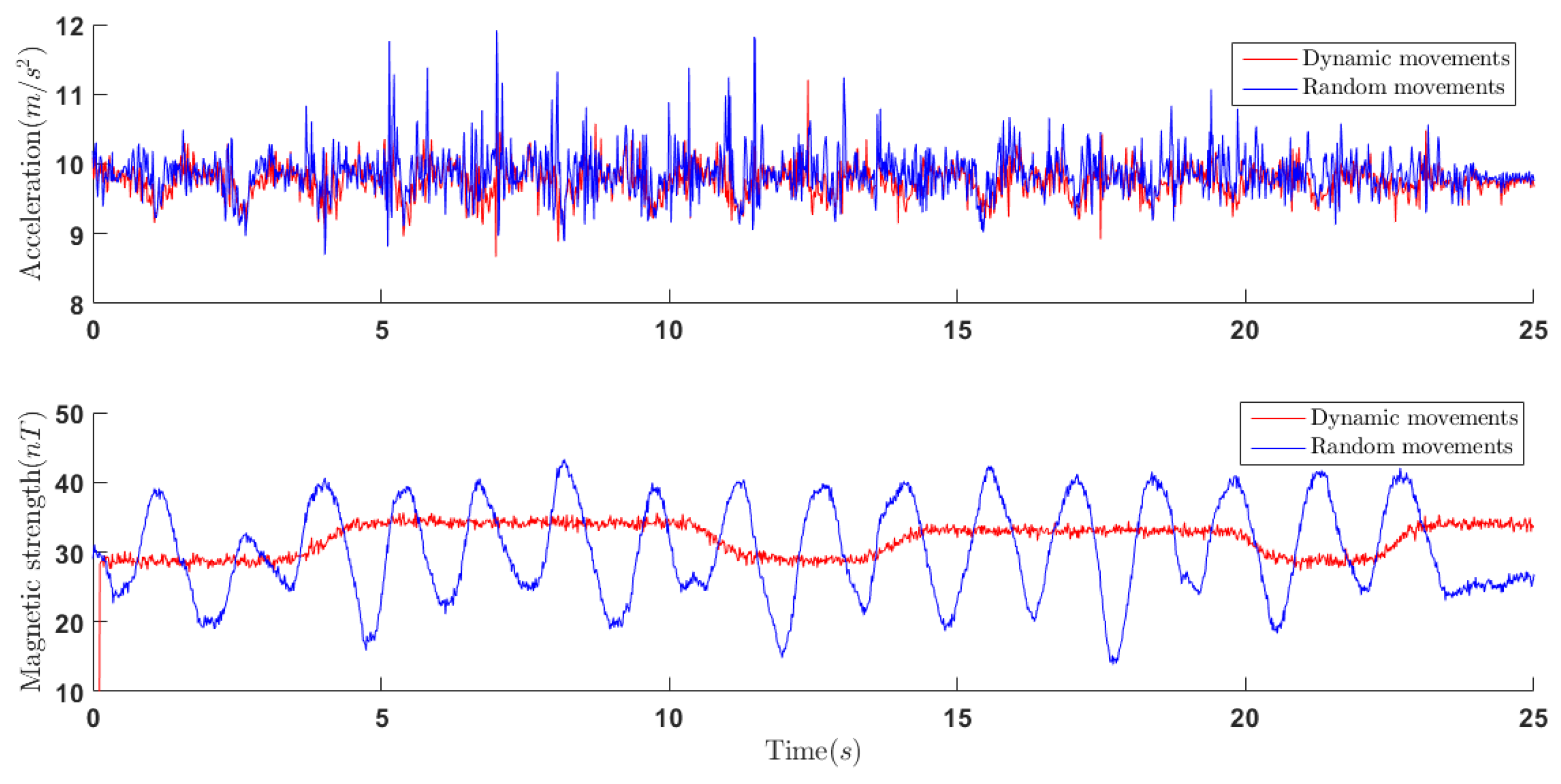
4.1. Data Acquisition
4.2. Results and Discussion
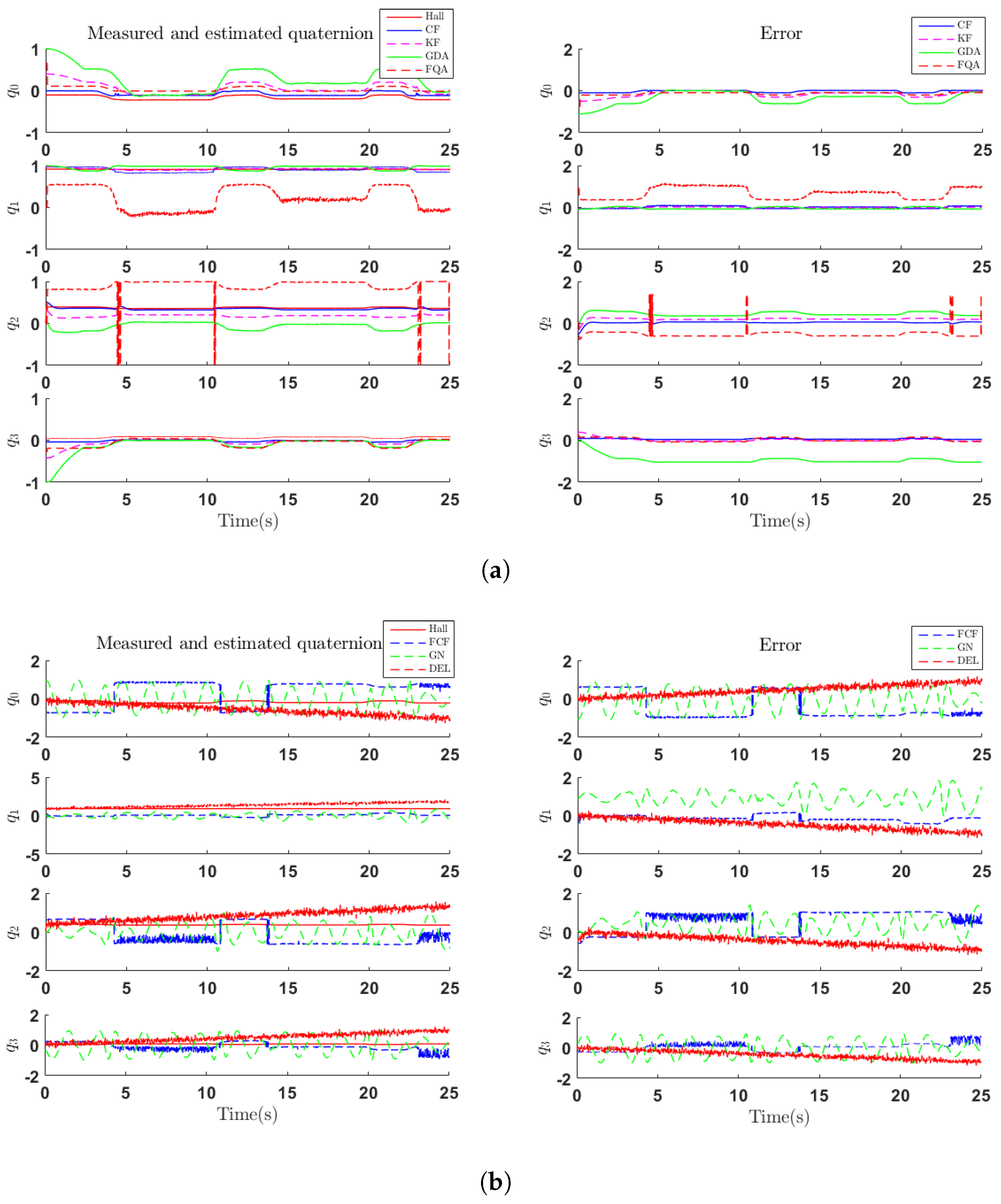
4.2.1. Accuracy Analysis
4.2.2. Computational Efficiency and Stability Analysis
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| IMU | Inertial Measurement Unit |
| DOF | Degree of freedom |
| FQA | Factored quaternion algorithm |
| GDA | Orientation estimating algorithm using a gradient descent algorithm |
| CF | Complementary filter proposed by this paper |
| KF | Kalman filter improved by this paper |
| FCF | A fast complementary filter whose fusion coefficients should be pre-tuned manually |
| GN | An improved algorithm using Gauss-Newton method |
References
- Zhou, H.; Hu, H. Human motion tracking for rehabilitation—A survey. Biomed. Signal Process. Control 2008, 3, 1–18. [Google Scholar] [CrossRef] [Green Version]
- Nair, L.H. AHRS based body orientation estimation for real time fall detection. In Proceedings of the International Conference on Innovations in Information, Embedded and Communication Systems, Coimbatore, India, 17–18 March 2017; pp. 1–4. [Google Scholar]
- Yang, U.J.; Kim, J.Y. Mechanical design of powered prosthetic leg and walking pattern generation based on motion capture data. Adv. Robot. 2015, 29, 1061–1079. [Google Scholar] [CrossRef]
- Gu, X.; Zhang, Y.; Sun, W.; Bian, Y.; Zhou, D.; Kristensson, P.O. Dexmo: An Inexpensive and Lightweight Mechanical Exoskeleton for Motion Capture and Force Feedback in VR. In Proceedings of the 2016 CHI Conference on Human Factors in Computing Systems, San Jose, CA, USA, 7–12 May 2016; pp. 1991–1995. [Google Scholar] [CrossRef]
- Shimizu, M.; Koide, K.; Ardiyanto, I.; Miura, J.; Oishi, S. LIDAR-based body orientation estimation by integrating shape and motion information. In Proceedings of the 2016 IEEE International Conference on Robotics and Biomimetics (ROBIO), Qingdao, China, 3–7 December 2016; pp. 1948–1953. [Google Scholar] [CrossRef]
- Lamine, H.; Bennour, S.; Laribi, M.A.; Romdhane, L.; Zaghloul, S. Evaluation of Calibrated Kinect Gait Kinematics Using a Vicon Motion Capture System. Comput. Methods Biomech. Biomed. Eng. 2017, 20, 111–112. [Google Scholar] [CrossRef]
- Yun, X.; Bachmann, E.R. Design, Implementation, and Experimental Results of a Quaternion-Based Kalman Filter for Human Body Motion Tracking. IEEE Trans. Robot. 2006, 22, 1216–1227. [Google Scholar] [CrossRef] [Green Version]
- Luinge, H.J.; Veltink, P.H. Inclination measurement of human movement using a 3-D accelerometer with autocalibration. IEEE Trans. Neural Syst. Rehabil. Eng. 2004, 12, 112–121. [Google Scholar] [CrossRef] [PubMed]
- Ligorio, G.; Sabatini, A.M. A Novel Kalman Filter for Human Motion Tracking with an Inertial-Based Dynamic Inclinometer. IEEE Trans. Biomed. Eng. 2015, 62, 2033–2043. [Google Scholar] [CrossRef] [PubMed]
- Shuster, M.D.; Oh, S.D. Three-axis attitude determination from vector observations. J. Guid. Control Dyn. 1981, 4, 70–77. [Google Scholar] [CrossRef]
- Yun, X.; Bachmann, E.R.; McGhee, R.B. A Simplified Quaternion-Based Algorithm for Orientation Estimation From Earth Gravity and Magnetic Field Measurements. IEEE Trans. Instrum. Meas. 2008, 57, 638–650. [Google Scholar] [CrossRef] [Green Version]
- Phan, D.; Kashyap, B.; Pathirana, P.N.; Seneviratne, A. A constrained nonlinear optimization solution for 3D orientation estimation of the human limb. In Proceedings of the 2017 10th Biomedical Engineering International Conference (BMEiCON), Hokkaido, Japan, 31 August–2 Septemper 2017; pp. 1–4. [Google Scholar] [CrossRef]
- Makni, A.; Fourati, H.; Kibangou, A.Y. Adaptive Kalman filter for MEMS-IMU based attitude estimation under external acceleration and parsimonious use of gyroscopes. In Proceedings of the 2014 European Control Conference (ECC), Strasbourg, France, 24–27 June 2014; pp. 1379–1384. [Google Scholar] [CrossRef]
- Sabatini, A.M. Estimating Three-Dimensional Orientation of Human Body Parts by Inertial/Magnetic Sensing. Sensors 2011, 11, 1489–1525. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Roetenberg, D.; Luinge, H.J.; Baten, C.T.M.; Veltink, P.H. Compensation of magnetic disturbances improves inertial and magnetic sensing of human body segment orientation. IEEE Trans. Neural Syst. Rehabil. Eng. 2005, 13, 395–405. [Google Scholar] [CrossRef] [PubMed]
- Roetenberg, D.; Baten, C.T.M.; Veltink, P.H. Estimating Body Segment Orientation by Applying Inertial and Magnetic Sensing Near Ferromagnetic Materials. IEEE Trans. Neural Syst. Rehabil. Eng. 2007, 15, 469–471. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Roetenberg, D.; Luinge, H.; Slycke, P. Xsens MVN: Full 6DOF Human Motion Tracking Using Miniature Inertial Sensors. Available online: http://www.xsens.com/images/stories/PDF/MVNwhitepaper.pdf (accessed on 12 March 2014).
- Bachmann, E.R.; McGhee, R.B.; Yun, X.; Zyda, M.J. Inertial and Magnetic Posture Tracking for Inserting Humans into Networked Virtual Environments. In Proceedings of the ACM Symposium on Virtual Reality Software and Technology, Baniff, AB, Canada, 15–17 November 2001; ACM: New York, NY, USA, 2001; pp. 9–16. [Google Scholar] [CrossRef]
- Gallagher, A.; Matsuoka, Y.; Ang, W.T. An efficient real-time human posture tracking algorithm using low-cost inertial and magnetic sensors. In Proceedings of the 2004 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) (IEEE Cat. No.04CH37566), Sendai, Japan, 28 September–2 October 2004; Volume 3, pp. 2967–2972. [Google Scholar] [CrossRef]
- Wu, J.; Zhou, Z.; Chen, J.; Fourati, H.; Li, R. Fast Complementary Filter for Attitude Estimation Using Low-Cost MARG Sensors. IEEE Sens. J. 2016, 16, 6997–7007. [Google Scholar] [CrossRef]
- Madgwick, S.O.H.; Harrison, A.J.L.; Vaidyanathan, R. Estimation of IMU and MARG orientation using a gradient descent algorithm. In Proceedings of the 2011 IEEE International Conference on Rehabilitation Robotics, Zurich, Switzerland, 29 June–1 July 2011; pp. 1–7. [Google Scholar] [CrossRef]
- Seel, T.; Ruppin, S. Eliminating the Effect of Magnetic Disturbances on the Inclination Estimates of Inertial Sensors. IFAC-PapersOnLine 2017, 50, 8798–8803. [Google Scholar] [CrossRef]
- Zhang, S.; Jin, W.; Zhang, Y. Implementation and complexity analysis of orientation estimation algorithms for human body motion tracking using low-cost sensors. In Proceedings of the 2017 2nd International Conference on Frontiers of Sensors Technologies (ICFST), Shenzhen, China, 14–16 April 2017; pp. 49–54. [Google Scholar] [CrossRef]
- Yadav, N.; Bleakley, C. Accurate Orientation Estimation Using AHRS under Conditions of Magnetic Distortion. Sensors 2014, 14, 20008–20024. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Myers, K.; Tapley, B. Adaptive sequential estimation with unknown noise statistics. IEEE Trans. Autom. Control 1976, 21, 520–523. [Google Scholar] [CrossRef]
- Palermo, E.; Rossi, S.; Marini, F.; Patanè, F.; Cappa, P. Experimental evaluation of accuracy and repeatability of a novel body-to-sensor calibration procedure for inertial sensor-based gait analysis. Measurement 2014, 52, 145–155. [Google Scholar] [CrossRef]
- Vargas-Valencia, L.S.; Elias, A.; Rocon, E.; Bastos-Filho, T.; Frizera, A. An IMU-to-Body Alignment Method Applied to Human Gait Analysis. Sensors 2016, 16, 2090. [Google Scholar] [CrossRef] [PubMed]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Algorithm | CF | KF | GDA | FQA | FCF | GN | DEL |
|---|---|---|---|---|---|---|---|
| RMS error | 0.0312 | 0.0465 | 0.2208 | 0.0622 | 0.3762 | 0.3653 | 0.2958 |
| RMS error | 0.0333 | 0.0558 | 0.0351 | 0.5414 | 0.2673 | 0.9790 | 0.3093 |
| RMS error | 0.0534 | 0.0458 | 0.2124 | 0.3440 | 0.3805 | 0.3348 | 0.2709 |
| RMS error | 0.0371 | 0.0678 | 0.9070 | 0.0911 | 0.2369 | 0.3329 | 0.3217 |
| Algorithm | CF | KF | GDA | FQA | FCF | GN | DEL |
|---|---|---|---|---|---|---|---|
| RMS error | 0.0372 | 0.0880 | 0.0561 | 0.1511 | 0.2088 | 0.1551 | 1.3173 |
| RMS error | 0.0852 | 0.1034 | 0.1631 | 0.1333 | 0.7500 | 0.9869 | 0.4463 |
| RMS error | 0.0659 | 0.0975 | 0.0596 | 0.1361 | 0.7846 | 1.0760 | 0.1675 |
| RMS error | 0.1774 | 0.3525 | 0.2866 | 0.4157 | 0.1127 | 0.6512 | 0.8094 |
| Algorithm | CF | KF | GDA | FCF | GN |
|---|---|---|---|---|---|
| Computational time (s) | 0.57995 | 0.91342 | 0.68451 | 0.6344 | 1.1746 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yi, C.; Ma, J.; Guo, H.; Han, J.; Gao, H.; Jiang, F.; Yang, C. Estimating Three-Dimensional Body Orientation Based on an Improved Complementary Filter for Human Motion Tracking. Sensors 2018, 18, 3765. https://doi.org/10.3390/s18113765
Yi C, Ma J, Guo H, Han J, Gao H, Jiang F, Yang C. Estimating Three-Dimensional Body Orientation Based on an Improved Complementary Filter for Human Motion Tracking. Sensors. 2018; 18(11):3765. https://doi.org/10.3390/s18113765
Chicago/Turabian StyleYi, Chunzhi, Jiantao Ma, Hao Guo, Jiahong Han, Hefu Gao, Feng Jiang, and Chifu Yang. 2018. "Estimating Three-Dimensional Body Orientation Based on an Improved Complementary Filter for Human Motion Tracking" Sensors 18, no. 11: 3765. https://doi.org/10.3390/s18113765
APA StyleYi, C., Ma, J., Guo, H., Han, J., Gao, H., Jiang, F., & Yang, C. (2018). Estimating Three-Dimensional Body Orientation Based on an Improved Complementary Filter for Human Motion Tracking. Sensors, 18(11), 3765. https://doi.org/10.3390/s18113765