Three-Dimensional Holographic Electromagnetic Imaging for Accessing Brain Stroke


Abstract
:1. Introduction
2. Basic Principle
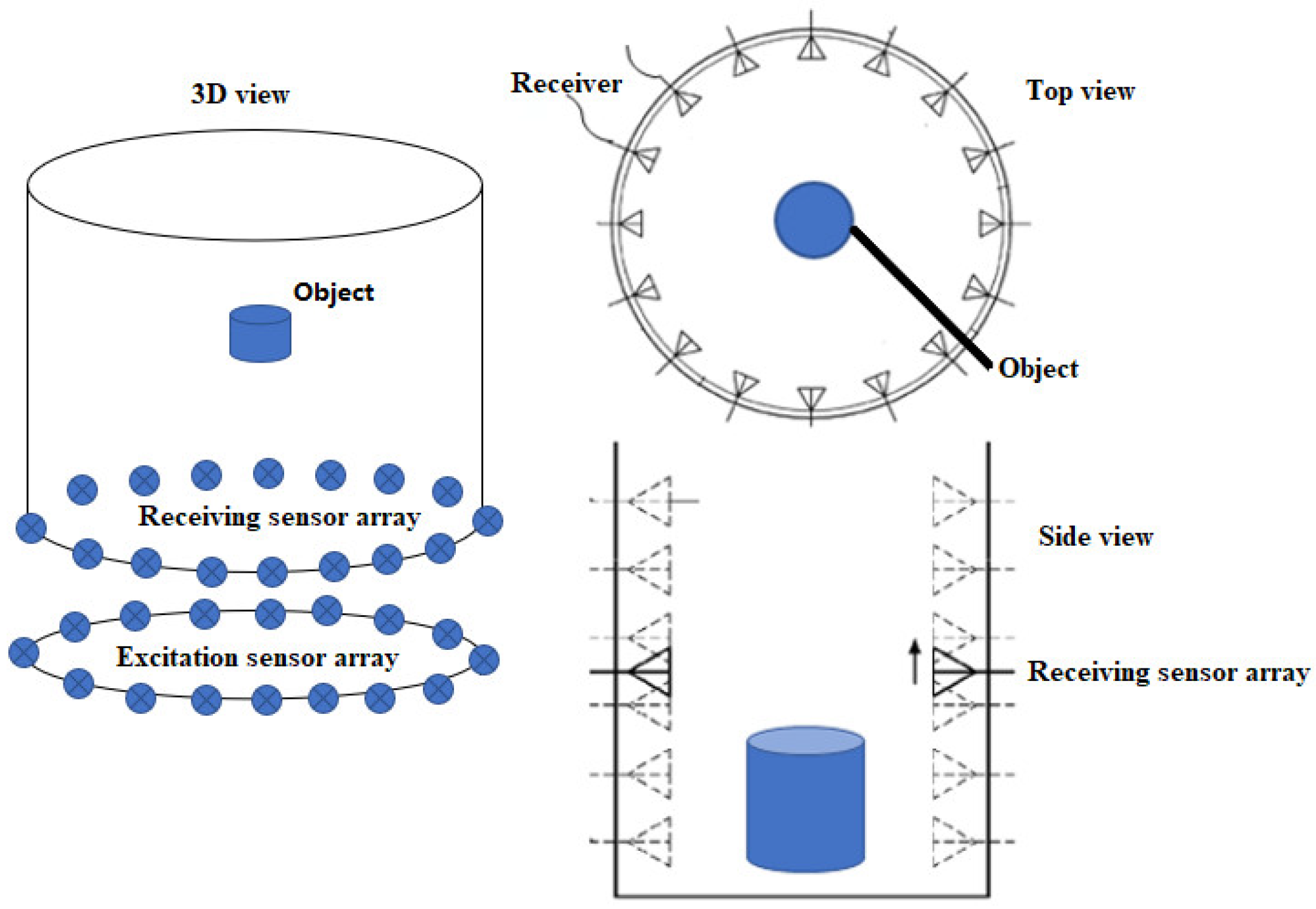
2.1. Concept of the 3D HEI System
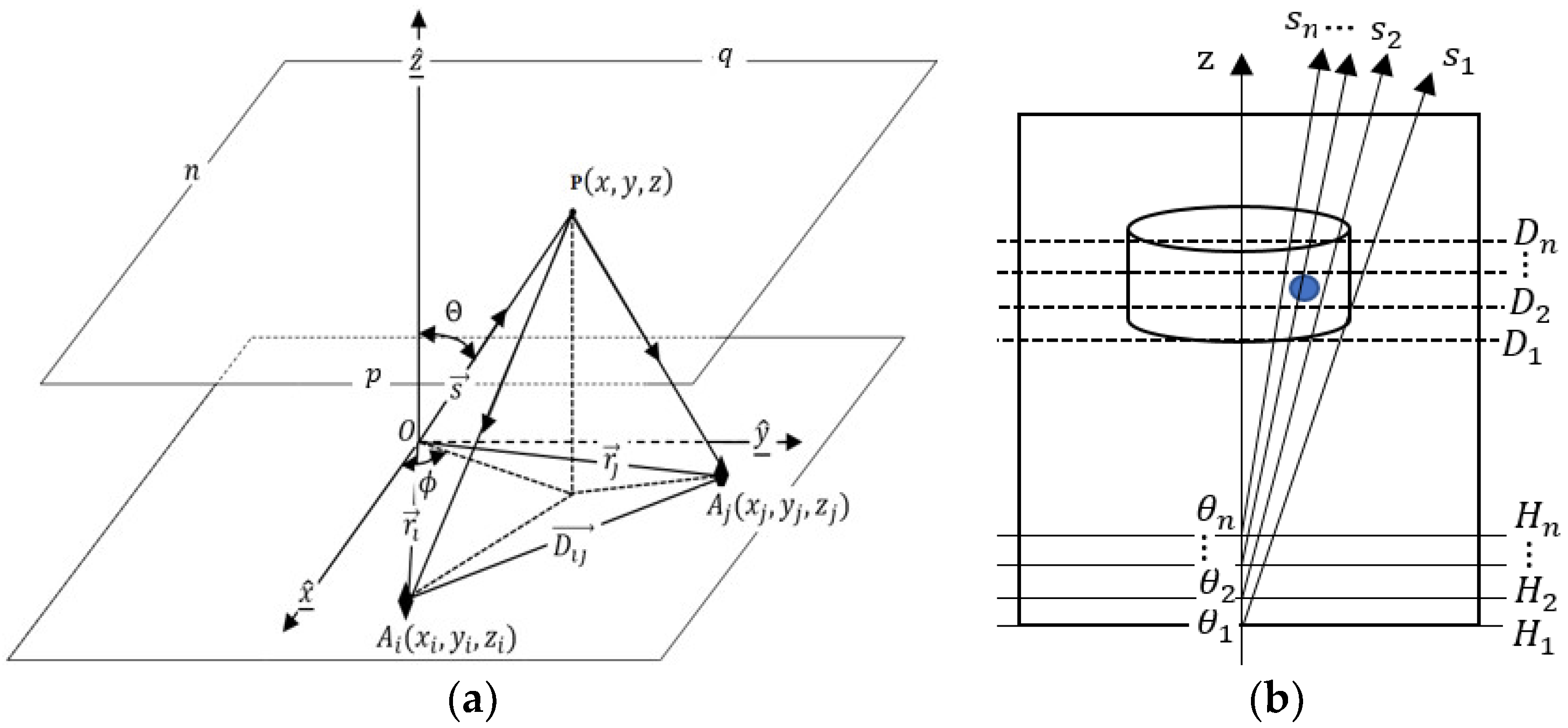
2.2. Forward Model
2.3. Backward Model
2.4. Image Processing
2.5. Metric
3. Numerical Experiments
3.1. Simulation Setup
3.2. RF Coil
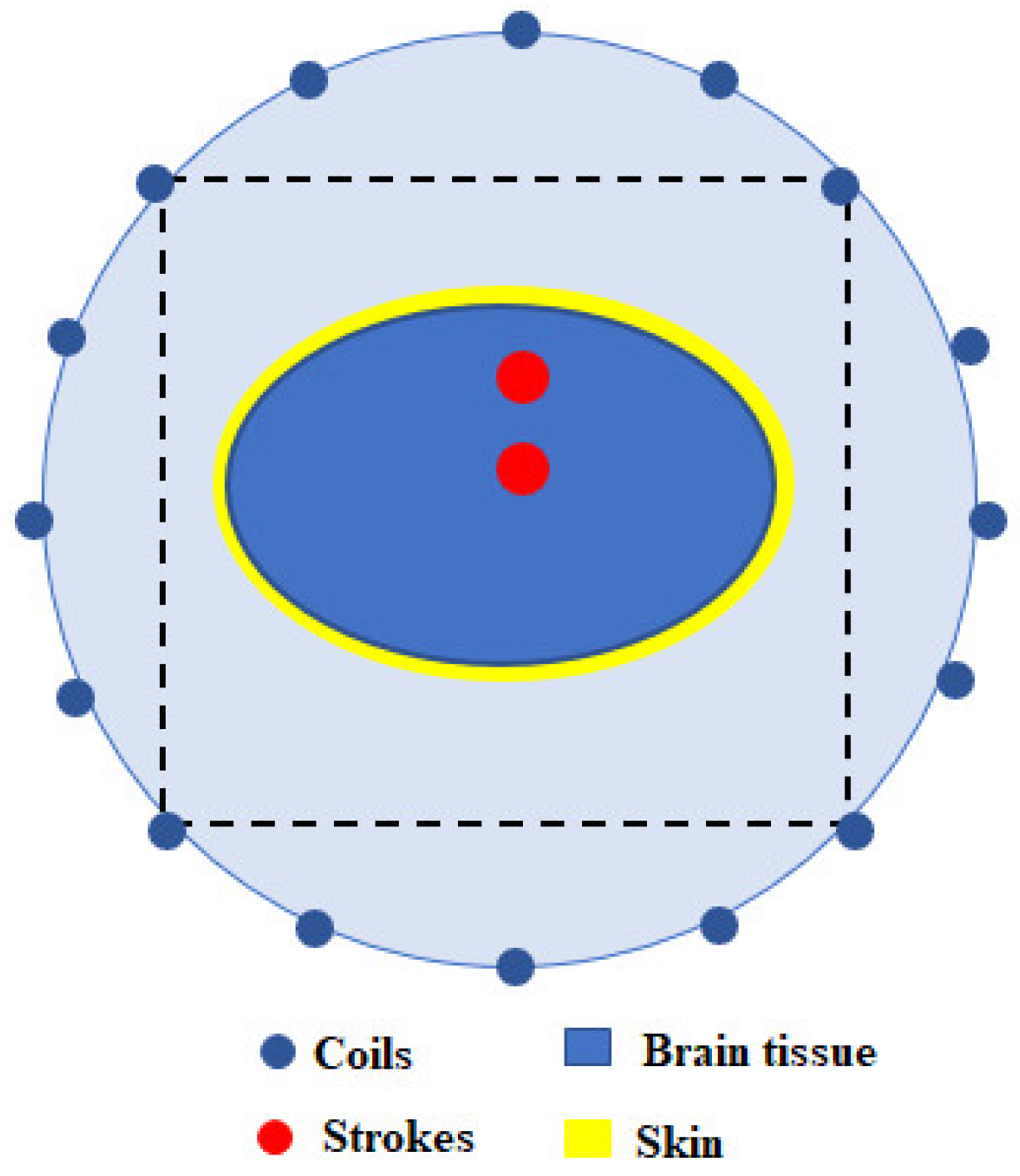
3.3. Head Model
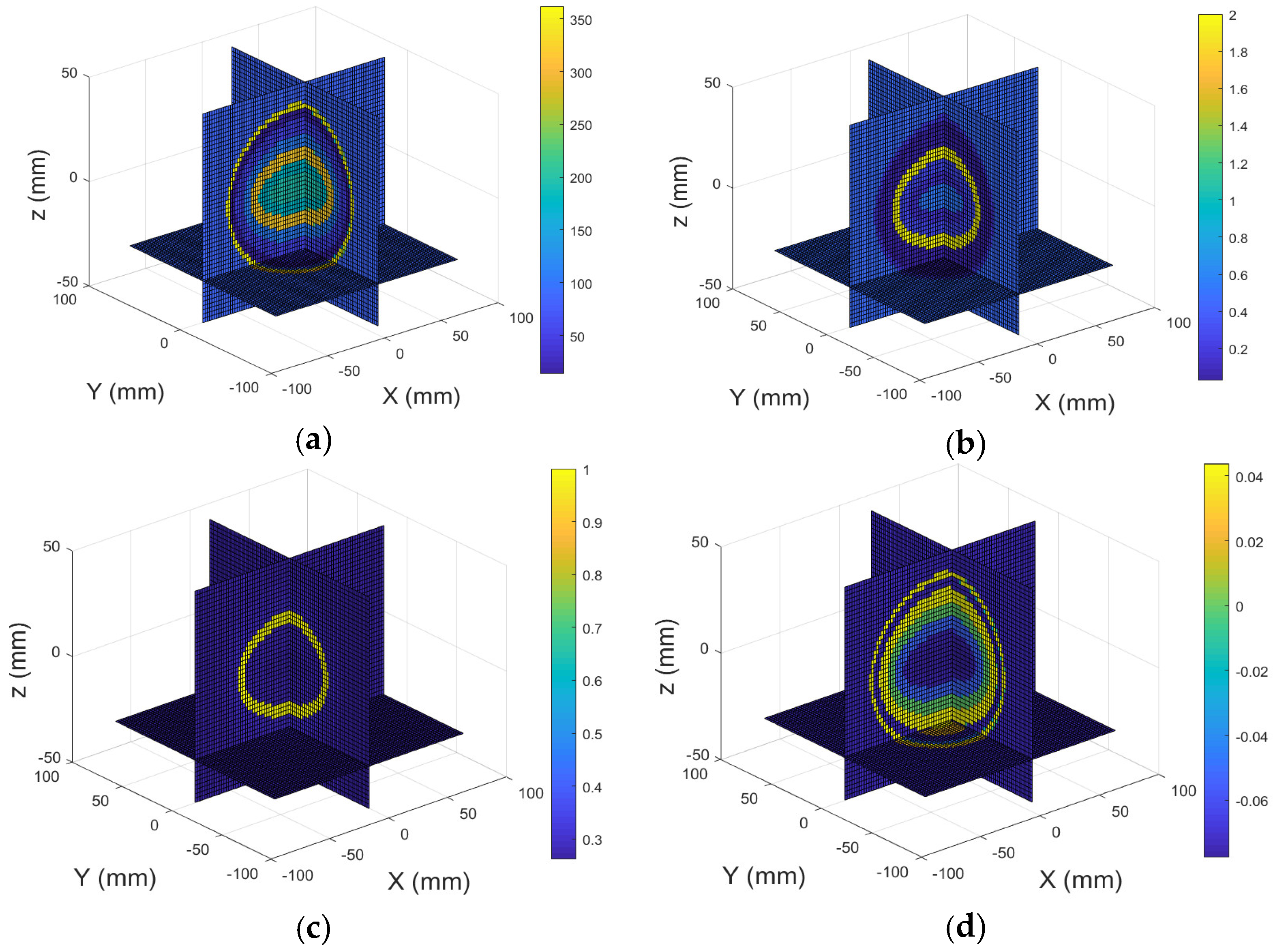
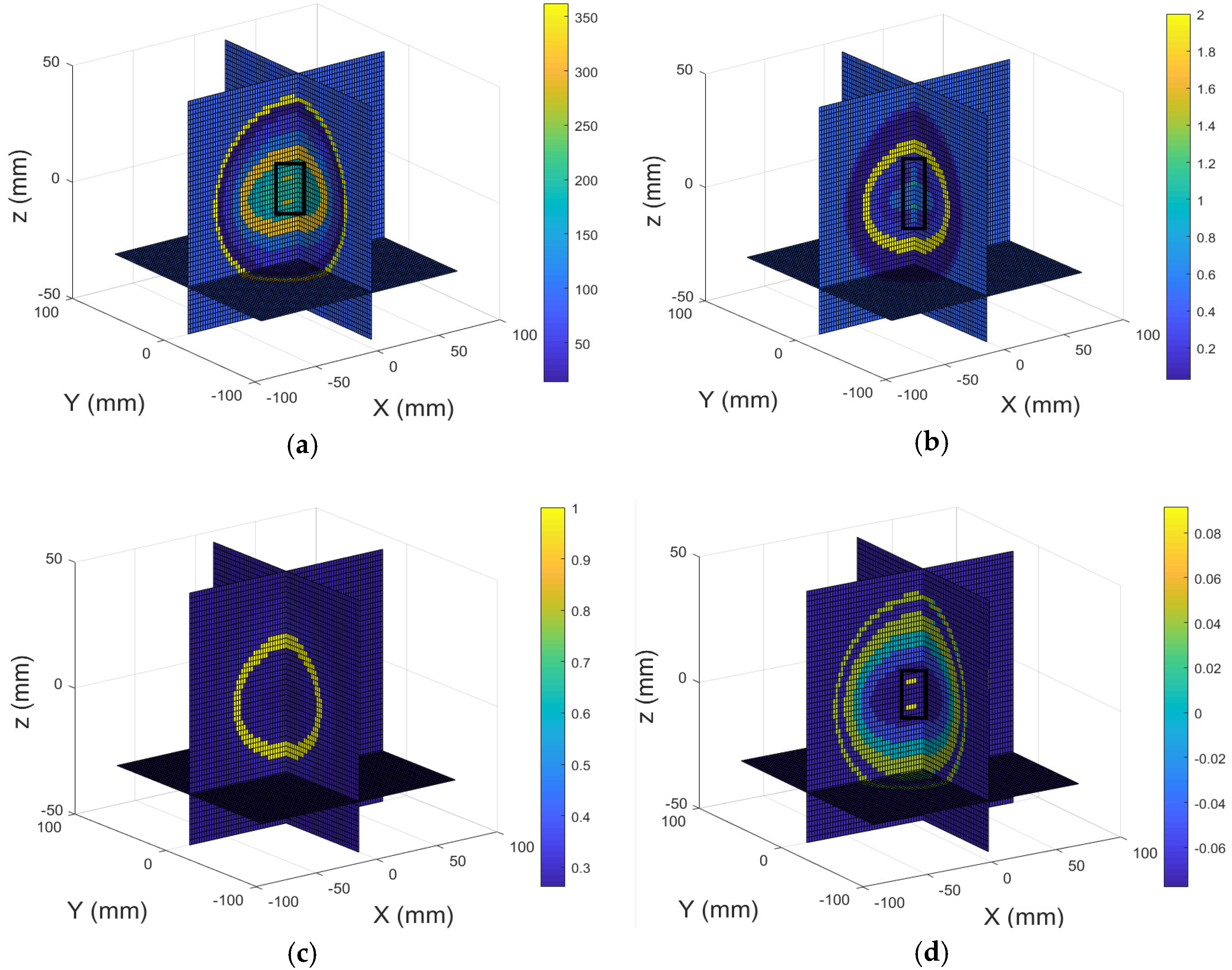
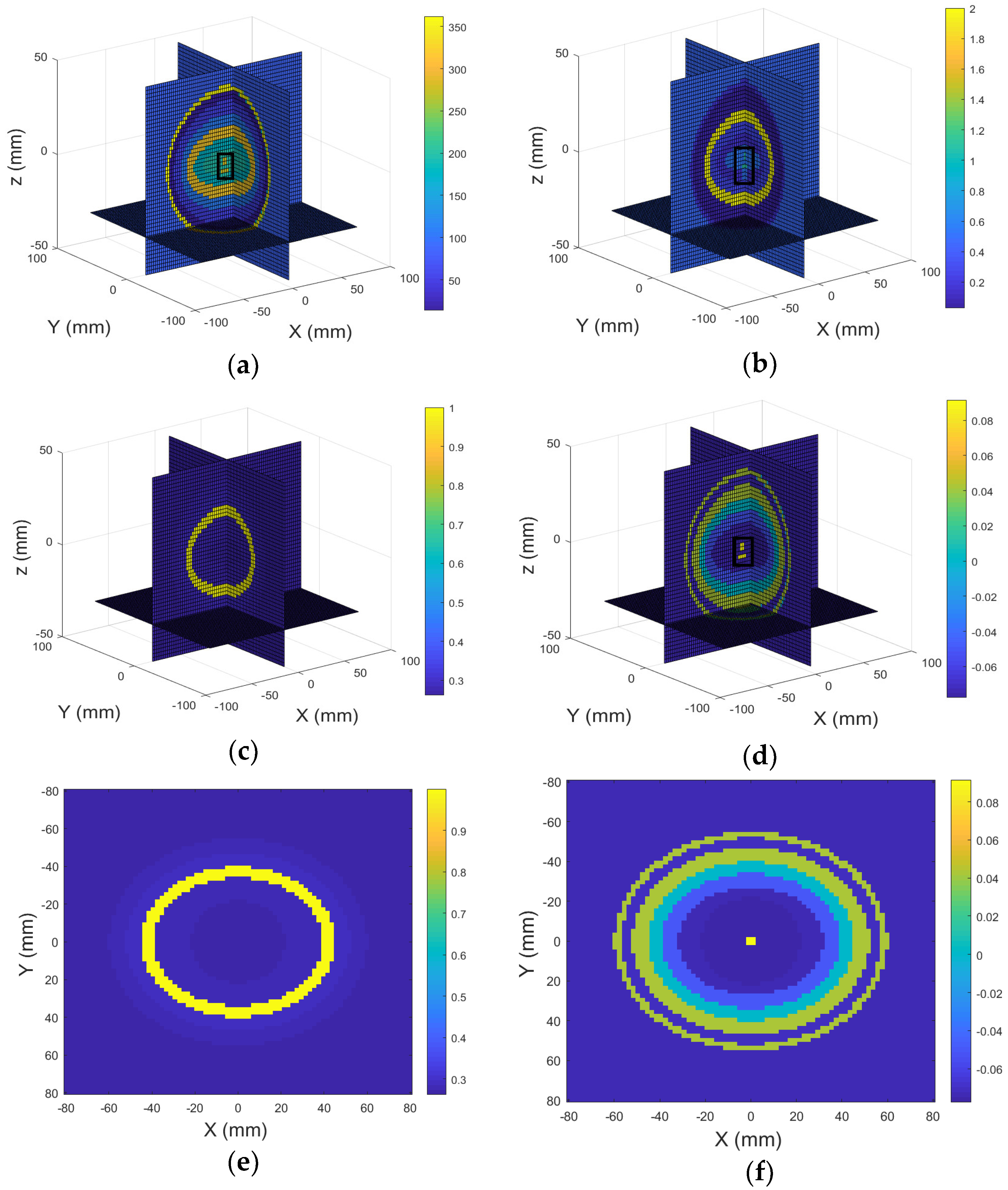
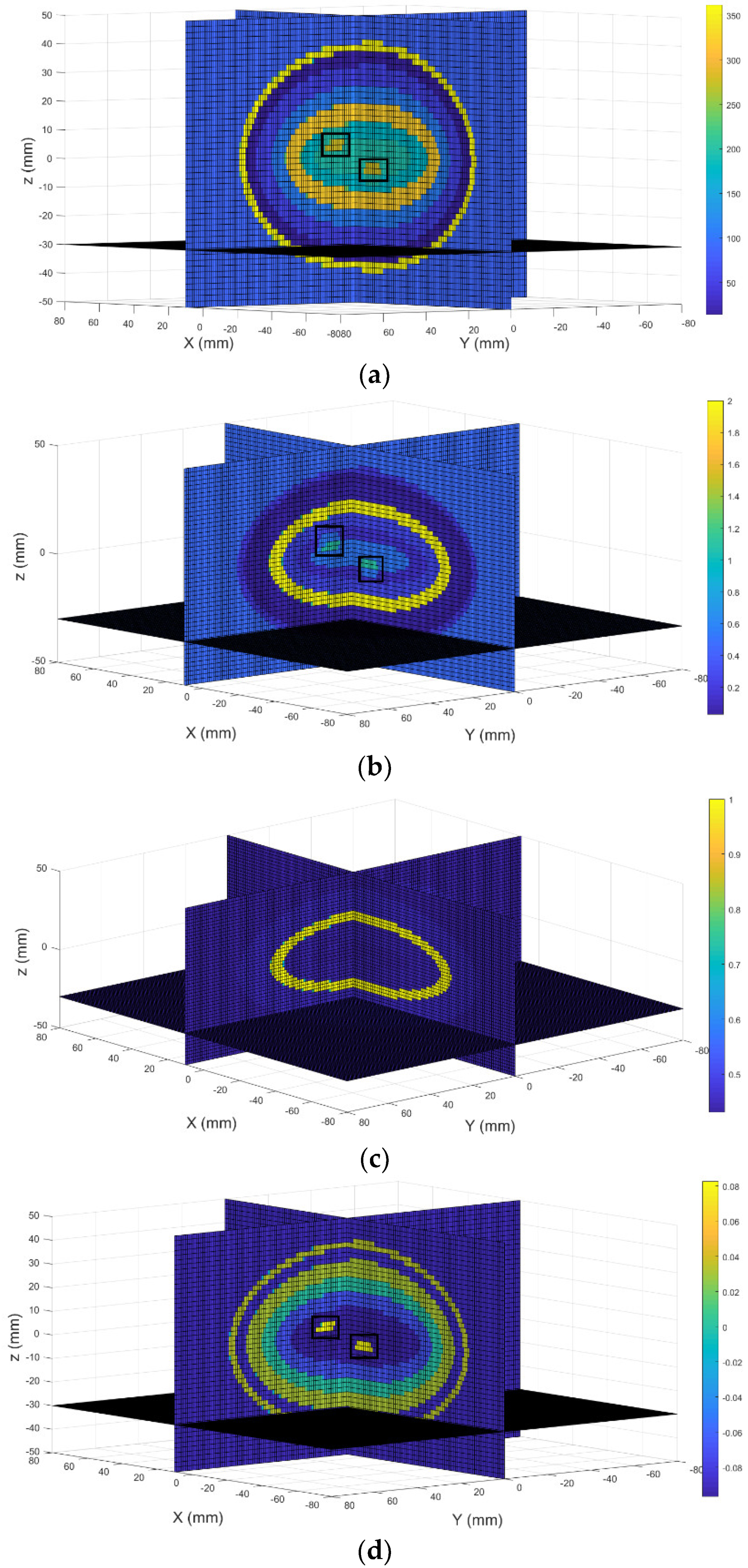
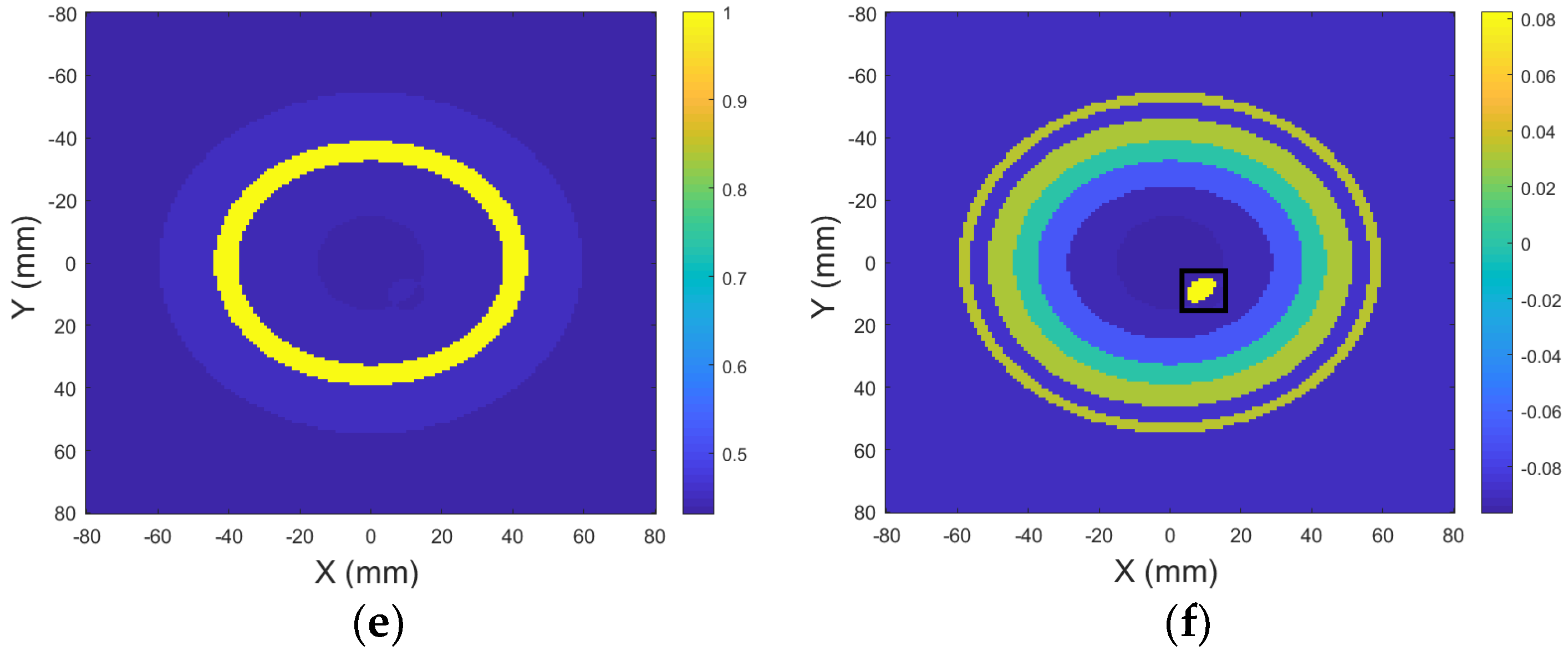
4. Results
5. Conclusions
Funding
Conflicts of Interest
References
- Matsui, T.; Mizuno, H.; Sudo, T.; Kikuta, J.; Haraguchi, N.; Ikeda, J.; Mizushima, T.; Yamamoto, H.; Morii, E.; Mori, M.; et al. Non-labeling multiphoton excitation microscopy as a novel diagnostic tool for discriminating normal tissue and colorectal cancer lesions. Sci. Rep. 2017, 7, 6959. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Joo, K.J.; Shin, J.W.; Dong, K.R.; Lim, C.S.; Chung, W.K.; Kim, Y.J. A study on the dependence of exposure dose reduction and image evaluation on the distance from the dental periapical x-ray machine. J. Korean Phys. Soc. 2013, 63, 1824–1831. [Google Scholar] [CrossRef]
- Gong, K.; Chengliao, J.; Wang, G.; Chen, K.T.; Catana, C.; Qi, J. Direct patlak reconstruction from dynamic pet data using the kernel method with MRI information based on structural similarity. IEEE Trans. Med. Imaging 2018, 37, 955. [Google Scholar] [CrossRef] [PubMed]
- Frölich, A.M.; Psychogios, M.N.; Klotz, E.; Schramm, R.; Knauth, M.; Schramm, P. Angiographic reconstructions from whole-brain perfusion CT for the detection of large vessel occlusion in acute stroke. Stroke 2012, 43, 97–102. [Google Scholar] [CrossRef] [PubMed]
- Brazzelli, M.; Sandercock, P.A.G.; Celani, M.G.; Righetti, E.; Chappell, F.M.; Arestis, N.; Wardlaw, J.M.; Deeks, J.J. MRI versus CT for detection of acute vascular lesions in patients presenting with stroke symptoms. Stroke 2010, 41, E427–E428. [Google Scholar] [CrossRef]
- Wali, F.A.; Brain, A.I. Effect of electromagnetic induction on impulse conduction in the frog nerve-muscle preparation. Biochem. Soc. Trans. 1989, 17, 1088–1089. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ireland, D.; Bialkowski, K.; Abbosh, A. Microwave imaging for brain stroke detection using born iterative method. IET Microw. Antennas Propag. 2013, 7, 909–915. [Google Scholar] [CrossRef]
- Tofighi, M.R.; Daryoush, A.S. Near field microwave brain imaging. Electron. Lett. 2001, 37, 807–808. [Google Scholar] [CrossRef]
- Almirall, H.; Broquetas, A.; Jofre, L. Active microwave computed brain tomography: The response to a challenge. J. Neurosci. Methods 1991, 36, 239. [Google Scholar] [CrossRef]
- Soulsby, C.T.; Khela, M.; Yazaki, E.; Evans, D.F.; Hennessy, E.; Powell-Tuck, J. Measurements of gastric emptying during continuous nasogastric infusion of liquid feed: Electric impedance tomography versus gamma scintigraphy. Clin. Nutr. 2006, 25, 671–680. [Google Scholar] [CrossRef] [PubMed]
- Gloning, S.; Pieper, K.; Zoellner, M.; Meyer-Lindenberg, A. Electrical impedance tomography for lung ventilation monitoring of the dog. Tierarztl. Prax. K Kleintiere Heimtiere 2017, 45, 15–21. [Google Scholar] [PubMed]
- Akhtarizavare, M.; Latiff, L.A. Electrical impedance tomography as a primary screening technique for breast cancer detection. APJCP 2015, 16, 5595–5597. [Google Scholar] [CrossRef]
- Liu, Y.; Zhang, Y. A feasibility study of magnetic resonance electrical impedance tomography for prostate cancer detection. Physiol. Meas. 2014, 35, 567. [Google Scholar] [CrossRef] [PubMed]
- Nguyen, D.T.; Jin, C.; Thiagalingam, A.; Mcewan, A.L. A review on electrical impedance tomography for pulmonary perfusion imaging. Physiol. Meas. 2012, 33, 695–706. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Clay, M.T.; Ferree, T.C. Weighted regularization in electrical impedance tomography with applications to acute cerebral stroke. IEEE Trans. Med. Imaging 2002, 21, 629. [Google Scholar] [CrossRef] [PubMed]
- Dai, M.; Li, B.; Hu, S.; Xu, C.; Yang, B.; Li, J.; Fu, F.; Fei, Z.; Dong, X. In vivo imaging of twist drill drainage for subdural hematoma: A clinical feasibility study on electrical impedance tomography for measuring intracranial bleeding in humans. PLoS ONE 2013, 8, e55020. [Google Scholar] [CrossRef] [PubMed]
- Shi, X.; You, F.; Feng, F.; Liu, R.; Yu, Y.; Dai, M.; Dong, X. Preliminary research on monitoring of cerebral ischemia using electrical impedance tomography technique. In Proceedings of the 30th Annual International Conference of the IEEE Engineering in Medicine and Biology Society, Vancouver, BC, Canada, 20–25 August 2008. [Google Scholar]
- Fu, F.; Li, B.; Dai, M.; Hu, S.J.; Li, X.; Xu, C.H.; Wang, B.; Yang, B.; Tang, M.X.; Dong, X.Z.; et al. Use of electrical impedance tomography to monitor regional cerebral edema during clinical dehydration treatment. PLoS ONE 2014, 9, e113202. [Google Scholar] [CrossRef] [PubMed]
- Bayford, R.; Tizzard, A. Bioimpedance imaging: An overview of potential clinical applications. Analyst 2012, 137, 4635. [Google Scholar] [CrossRef] [PubMed]
- Merwa, R.; Hollaus, K.; Oszkar, B.; Scharfetter, H. Detection of brain oedema using magnetic induction tomography: A feasibility study of the likely sensitivity and detectability. Physiol. Meas. 2004, 25, 347. [Google Scholar] [CrossRef] [PubMed]
- Al-Zeibak, S.; Saunders, N.H. A feasibility study of in vivo electromagnetic imaging. Phys. Med. Biol. 1993, 38, 151–160. [Google Scholar] [CrossRef] [PubMed]
- Zolgharni, M.; Griffiths, H.; Ledger, P.D. Frequency-difference MIT imaging of cerebral haemorrhage with a hemispherical coil array: Numerical modelling. Physiol. Meas. 2010, 31, S111. [Google Scholar] [CrossRef] [PubMed]
- Brunner, P.; Merwa, P.; Missner, A.; Rosell, J.; Hollaus, K.; Scharfetter, H. Reconstruction of the shape of conductivity spectra using differential multi-frequency magnetic induction tomography. Physiol. Meas. 2006, 27, S237. [Google Scholar] [CrossRef] [PubMed]
- Griffiths, H.; Stewart, W.R.; Gough, W. Magnetic induction tomography: A measuring system for biological tissues. Ann. N. Y. Acad. Sci. 1999, 873, 335–345. [Google Scholar] [CrossRef] [PubMed]
- Korjenevsky, A.; Cherepenin, V.; Sapetsky, S. Magnetic induction tomography: Experimental realization. Physiol. Meas. 2000, 21, 89. [Google Scholar] [CrossRef] [PubMed]
- Watson, S.; Williams, R.J.; Gough, W.; Griffiths, H. A magnetic induction tomography system for samples with conductivities below 10 s/m. Meas. Sci. Technol. 2008, 19, 88–91. [Google Scholar] [CrossRef]
- Xiao, Z.; Tan, C.; Dong, F. Multi-frequency difference method for intracranial hemorrhage detection by magnetic induction tomography. Physiol. Meas. 2018, 39, 055006. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Hollaus, K.; Magele, C.; Merwa, R.; Scharfetter, H. Numerical simulation of the eddy current problem in magnetic induction tomography for biomedical applications by edge elements. IEEE Trans. Magn. 2004, 40, 623–626. [Google Scholar] [CrossRef]
- Wang, L. Electromagnetic induction holography imaging for stroke detection. J. Opt. Soc. Am. A 2017, 34, 294. [Google Scholar] [CrossRef] [PubMed]
- Wang, L.; Al-Jumaily, A.M. Imaging of lung structure using holographic electromagnetic induction. IEEE Access 2017, 5, 20318. [Google Scholar] [CrossRef]
- Born, M.; Wolf, E.; Hecht, E. Principles of Optics: Electromagnetic Theory of Propagation, Interference and Diffraction of Light; Pergamon: New York, NY, USA, 1975. [Google Scholar]
- Levanda, R.; Leshem, A. Synthetic aperture radio telescopes. IEEE Signal Process. Mag. 2010, 27, 14–29. [Google Scholar] [CrossRef] [Green Version]
- Wang, L.; Al-Jumaily, A.M.; Simpkin, R. Imaging of 3-D dielectric objects using far-field holographic microwave imaging technique. Prog. Electromagn. Res. B 2014, 61, 135–147. [Google Scholar] [CrossRef]
- Italian National Research Council. An Internet Resource for the Calculation of the Dielectric Properties of Body Tissues in the Frequency Range 10 Hz–100 GHz. Available online: http://niremf.ifac.cnr.it/tissprop (accessed on 15 September 2018).
- Fhager, A.; Hashemzadeh, P.; Persson, M. Reconstruction quality and spectral content of an electromagnetic time-domain inversion algorithm. IEEE Trans. Biomed. Eng. 2006, 53, 1594–1604. [Google Scholar] [CrossRef] [PubMed]
- Johnson, J.E.; Takenaka, T.; Tanaka, T. Two-dimensional time-domain inverse scattering for quantitative analysis of breast composition. IEEE Trans. Biomed. Eng. 2008, 55, 1941–1945. [Google Scholar] [CrossRef] [PubMed]
- Wang, L.; Al-Jumaily, A.M.; Simpkin, R. Investigation of antenna array configurations using far-field holographic microwave imaging technique. Prog. Electromagnet. Res. M 2015, 42, 1–11. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Structure | Thickness (mm) | σ (S/m) | Relative Permittivity |
|---|---|---|---|
| Matching medium | 20 | 0.48 | 88 |
| Skin | 3 | 0.1973 | 361.66 |
| Fat | 5 | 0.029 | 13.767 |
| Skull | 7 | 0.0828 | 53.8 |
| CSF | 3 | 2 | 109 |
| Grey matter | 6 | 0.292 | 320 |
| White matter | 7 | 0.159 | 176 |
| Dura | 5 | 0.544 | 194.93 |
| Blood | 3/5 | 1.097 | 280 |
| Model | Head Contains Two Inclusions (5 mm in Radius) Located at (0 mm, 0 mm, 8 mm) and (0 mm, 0 mm, −8 mm) | Head Contains Two Inclusions (3 mm, 5 mm in Radius) Located at (0 mm, 0 mm, 0 mm) and (0 mm, 0 mm, −8 mm). | Head Contains Two Inclusions (5 mm in radius) Located at (10 mm, 10 mm, 6 mm) and (0 mm, 0 mm, −6 mm) |
|---|---|---|---|
| PSNR (dB) | 49.9943 | 36.6764 | 49.9943 |
| SNR (dB) | 5.6384 | 2.0651 | 5.6382 |
| MSE of real part | 0.9657 | 0.9657 | 0.9657 |
| MSE of Imagery part | 0.4896 | 0.0876 | 0.0498 |
| SSIM of real part | 0.0455 | 0.4896 | 0.04986 |
| SSIM of Imagery part | 0.0455 | 0.0455 | 0.0455 |
© 2018 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, L. Three-Dimensional Holographic Electromagnetic Imaging for Accessing Brain Stroke. Sensors 2018, 18, 3852. https://doi.org/10.3390/s18113852
Wang L. Three-Dimensional Holographic Electromagnetic Imaging for Accessing Brain Stroke. Sensors. 2018; 18(11):3852. https://doi.org/10.3390/s18113852
Chicago/Turabian StyleWang, Lulu. 2018. "Three-Dimensional Holographic Electromagnetic Imaging for Accessing Brain Stroke" Sensors 18, no. 11: 3852. https://doi.org/10.3390/s18113852
APA StyleWang, L. (2018). Three-Dimensional Holographic Electromagnetic Imaging for Accessing Brain Stroke. Sensors, 18(11), 3852. https://doi.org/10.3390/s18113852