Proactive Coverage Area Decisions Based on Data Field for Drone Base Station Deployment


Abstract
:1. Introduction
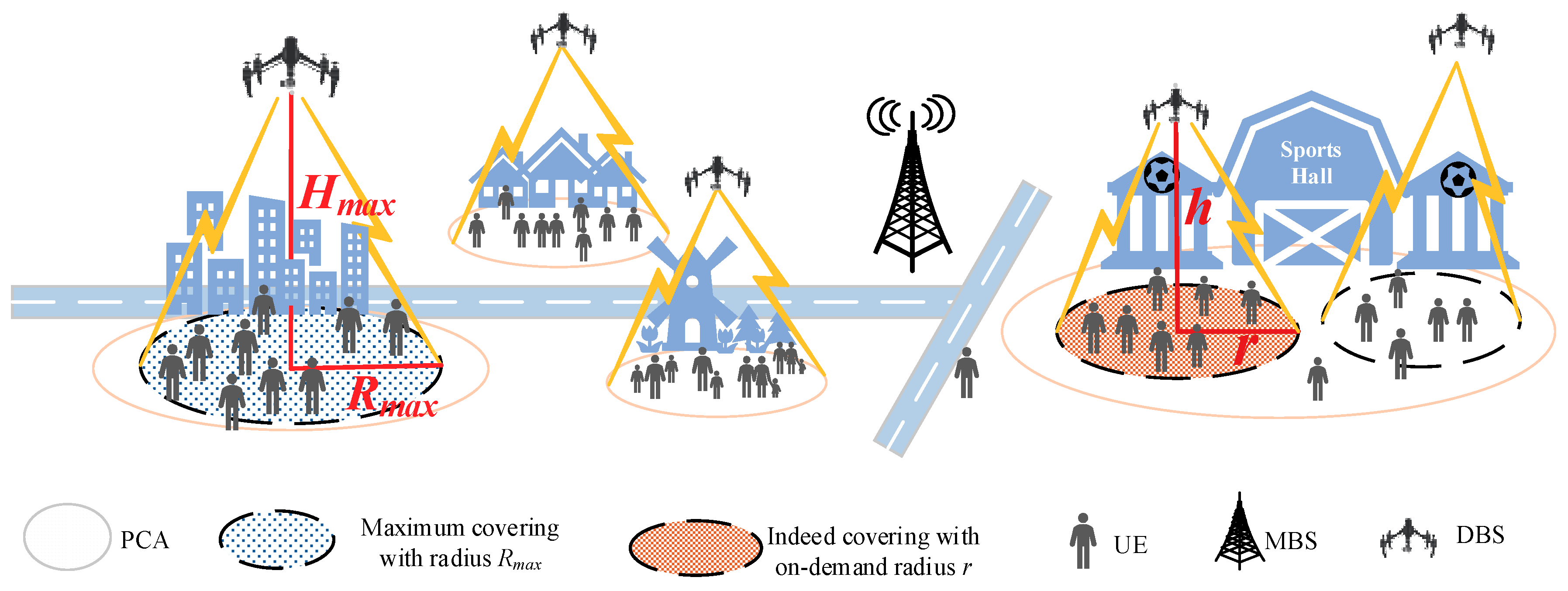
- The coverage area of DBSs: One of the greatest challenges is to identify the proactive coverage area (PCA) that a DBS needs to cover. Especially in an overload condition caused by burst crowd traffic, the PCAs enclosed with more UE covered by the DBS benefits the network the most. Moreover, when the PCAs are determined, how to allocate DBSs to cover these areas is also one of the problems to be solved.
- The number of DBSs and the total energy consumption need to be considered. The authors assume that each DBS has a minimum and a maximum vertical altitude. Moreover, the energy consumption of a DBS is related to its altitude. Indeed, the higher the altitude, the larger the covered area, the higher the energy consumption. Thus, the on-demand coverage radius and the optimal altitude, as two key cost metrics, should be considered.
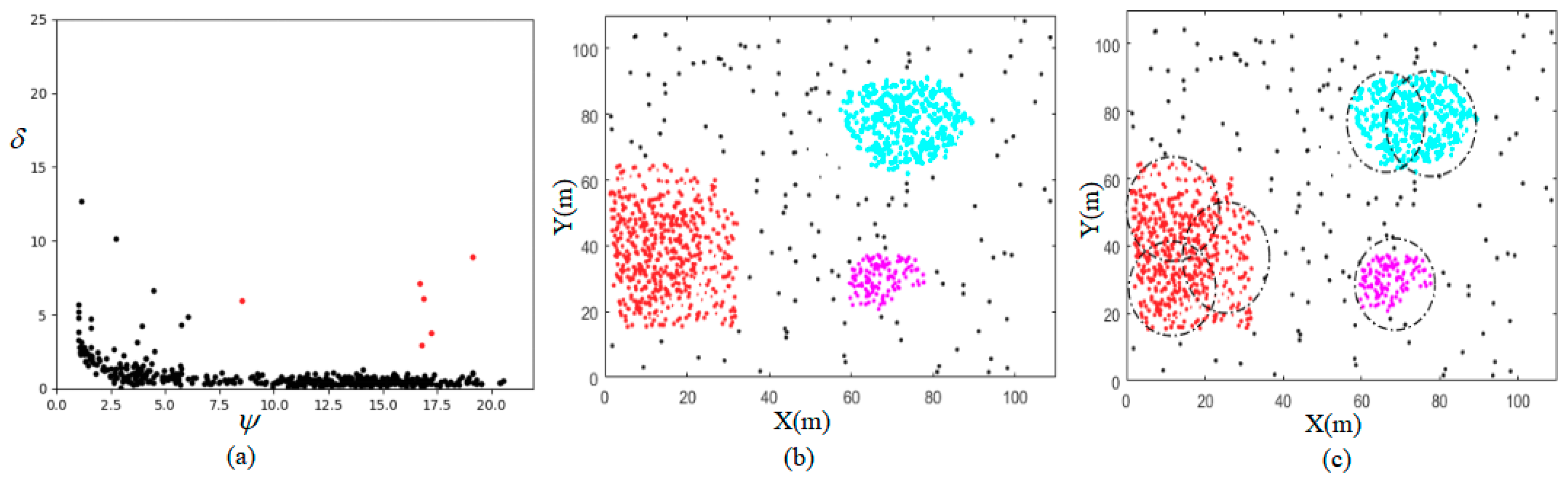
- A novel method is proposed for deciding the PCAs. According to data field theory, a demand point with a larger potential value has more demand points gathered around it [8]. Then, the region centering on the demand point with local maximum potential value can be decided as a PCA. Compared to a heuristic DBS location decision, assigning DBSs to cover the decided PCAs has a lower complexity.
- To cover the decided PCAs by the supplied DBSs, treated as which DBSs serve which PCAs problem, the authors design the “first-best-effort and second-patching” (FBE–SP) algorithm to solve the problem.
- Meanwhile, the minimum energy cost mechanism is employed in this paper. The authors further consider the on-demand coverage radius and the optimal altitude as two cost metrics. The on-demand coverage radius is determined by the size of the area that the DBS actually needs to cover, while the corresponding optimal altitude can be more simply obtained by solving the linear equation between altitude and coverage radius.
2. Related Works
3. System Model and Problem Formulation
3.1. System Model
3.2. Problem Formulation
4. Efficient Solution for the MCMC Problem
4.1. Deciding Proactive Coverage Areas
| Algorithm 1. PCAs decision algorithm for DBSs placement |
|
4.2. Placing-And-Operating the DBSs
| Algorithm 2. First-Best-Effort and Second-Patching algorithm (FBE–SP) |
| Initialization: Set the number of supplied DBSs as K, and the corresponding capacity is UDBS of each DBS, a set of congested UE of PCA, A = {a1, a2, …, aL}, where aj represents the numbers of UE in the -th PCA, |.| denotes the cardinal number. |
|
4.3. 3D Location Optimizing for Energy Efficiency
4.4. Complexity Analysis
5. Simulation Analysis
5.1. Simulation Implementation
5.2. Performance Evaluation
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Kela, P.; Turkka, J.; Costa, M. Borderless mobility in 5G outdoor ultra-dense networks. IEEE Access 2015, 3, 1462–1476. [Google Scholar] [CrossRef]
- Zhang, N.; Zhang, S.; Yang, P.; Alhussein, O.; Zhuang, W.; Shen, X. Software defined space-air-ground integrated vehicular networks: Challenges and solutions. IEEE Commun. Mag. 2017, 55, 101–109. [Google Scholar] [CrossRef]
- Chandrasekharan, S.; Gomez, K.; Al-Hourani, A.; Kandeepan, S. Designing and implementing future aerial communication networks. IEEE Commun. Mag. 2016, 54, 26–34. [Google Scholar] [CrossRef] [Green Version]
- Sharma, V.; Sabatini, R.; Ramasamy, S. UAVs Assisted Delay Optimization in Heterogeneous Wireless Networks. IEEE Commun. Lett. 2016, 20, 2526–2529. [Google Scholar] [CrossRef]
- Kalantari, E.; Yanikomeroglu, H.; Yongacoglu, A. On the number and 3D placement of drone base stations in wireless cellular networks. In Proceedings of the Vehicular Technology Conference, Montreal, QC, Canada, 18–21 September 2016; pp. 1–6. [Google Scholar]
- Gupta, L.; Jain, R.; Vaszkun, G. Survey of important issues in UAV communication networks. IEEE Commun. Surv. Tutor. 2016, 18, 1123–1152. [Google Scholar] [CrossRef]
- Iellamo, S.; Lehtomaki, J.J.; Khan, Z. Placement of 5G Drone Base Stations by Data Field Clustering. In Proceedings of the IEEE 85th Vehicular Technology Conference, Toronto, ON, Canada, 4–7 June 2017; pp. 1–5. [Google Scholar]
- Rodriguez, A.; Laio, A. Clustering by fast search and find of density peaks. Science 2014, 344, 1492–1496. [Google Scholar] [CrossRef] [PubMed]
- Miranda, K.; Molinaro, A.; Razafindralambo, T. A survey on rapidly deployable solutions for post-disaster networks. IEEE Commun. Mag. 2016, 54, 117–123. [Google Scholar] [CrossRef]
- Zhang, C.; Zhang, W. Spectrum sharing for drone networks. IEEE J. Sel. Areas Commun. 2017, 35, 136–144. [Google Scholar] [CrossRef]
- Andreev, S.; Petrov, V.; Dohler, M.; Yanikomeroglu, H. Future of Ultra-Dense Networks Beyond 5G: Harnessing Heterogeneous Moving Cells. arxiv, 2017; arXiv:1706.05197. [Google Scholar]
- Wu, Q.; Zeng, Y.; Zhang, R. Joint trajectory and communication design for multi-UAV enabled wireless networks. IEEE Trans. Wirel. Commun. 2018, 17, 2109–2121. [Google Scholar] [CrossRef]
- Zorbas, D.; Pugliese, L.D.P.; Razafindralambo, T.; Guerriero, F. Optimal drone placement and cost-efficient target coverage. J. Netw. Comput. Appl. 2016, 75, 16–31. [Google Scholar] [CrossRef] [Green Version]
- Al-Hourani, A.; Kandeepan, S.; Jamalipour, A. Modeling air-to-ground path loss for low altitude platforms in urban environments. In Proceedings of the IEEE Global Communications Conference, Austin, TX, USA, 8–12 December 2014; pp. 2898–2904. [Google Scholar]
- Al-Hourani, A.; Kandeepan, S.; Lardner, S. Optimal LAP altitude for maximum coverage. IEEE Wirel. Commun. Lett. 2014, 3, 569–572. [Google Scholar] [CrossRef]
- Lyu, J.; Zeng, Y.; Zhang, R.; Lim, T.J. Placement optimization of UAV-mounted mobile base stations. IEEE Commun. Lett. 2017, 21, 604–607. [Google Scholar] [CrossRef]
- Bor-Yaliniz, R.I.; El-Keyi, A.; Yanikomeroglu, H. Efficient 3-D placement of an aerial base station in next generation cellular networks. In Proceedings of the IEEE International Conference on Communications, Kuala Lumpur, Malaysia, 22–27 May 2016; pp. 1–5. [Google Scholar]
- Shi, W.; Li, J.; Xu, W.; Zhou, H.; Zhang, N.; Zhang, S.; Shen, X. Multiple drone-cell deployment analyses and optimization in drone assisted radio access networks. IEEE Access 2018, 6, 12518–12529. [Google Scholar] [CrossRef]
- Alzenad, M.; El-keyi, A.; Lagum, F.; Yanikomeroglu, H. 3D placement of an unmanned aerial vehicle base station (UAV-BS) for energy-efficient maximal coverage. IEEE Wirel. Commun. Lett. 2017, 6, 434–437. [Google Scholar] [CrossRef]
- Xie, J.; Dong, C.; Wang, H.; Li, A. Performance analysis of drone small cells under inter-cell interference. In Proceedings of the Ninth International Conference on Wireless Communications and Signal Processing, Nanjing, China, 11–13 October 2017; pp. 1–6. [Google Scholar]
- Mozaffari, M.; Saad, W.; Bennis, M.; Debbah, M. Efficient deployment of multiple unmanned aerial vehicles for optimal wireless coverage. IEEE Commun. Lett. 2016, 20, 1647–1650. [Google Scholar] [CrossRef]
- Li, D.; Wang, S.; Gan, W.; Li, D. Data field for hierarchical clustering. Int. J. Data Warehous. Min. 2011, 7, 43–63. [Google Scholar]
- Zhao, P.; Qin, K.; Ye, X.; Wang, Y.; Chen, Y. A trajectory clustering approach based on decision graph and data field for detecting hotspots. Int. J. Geogr. Inf. 2016, 31, 1101–1127. [Google Scholar] [CrossRef]
- Yang, P.; Cao, X.; Yin, C.; Xiao, Z.; Xi, X.; Wu, D. Proactive drone cell deployment: Overload relief for a cellular network under flash crowd traffic. IEEE Trans. Intell. Transp. Syst. 2017, 18, 2877–2892. [Google Scholar] [CrossRef]
- Mirahsan, M.; Schoenen, R.; Yanikomeroglu, H. HetHetNets: Heterogeneous traffic distribution in heterogeneous wireless cellular networks. IEEE J. Sel. Areas Commun. 2015, 33, 2252–2265. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Urban | Suburban | |
|---|---|---|
| (1,20) | (0.1,21) | |
| (9.61,0.16) | (4.88,0.43) |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hu, B.; Wang, C.; Chen, S.; Wang, L.; Yang, H. Proactive Coverage Area Decisions Based on Data Field for Drone Base Station Deployment. Sensors 2018, 18, 3917. https://doi.org/10.3390/s18113917
Hu B, Wang C, Chen S, Wang L, Yang H. Proactive Coverage Area Decisions Based on Data Field for Drone Base Station Deployment. Sensors. 2018; 18(11):3917. https://doi.org/10.3390/s18113917
Chicago/Turabian StyleHu, Bo, Chuan’an Wang, Shanzhi Chen, Lei Wang, and Hanzhang Yang. 2018. "Proactive Coverage Area Decisions Based on Data Field for Drone Base Station Deployment" Sensors 18, no. 11: 3917. https://doi.org/10.3390/s18113917
APA StyleHu, B., Wang, C., Chen, S., Wang, L., & Yang, H. (2018). Proactive Coverage Area Decisions Based on Data Field for Drone Base Station Deployment. Sensors, 18(11), 3917. https://doi.org/10.3390/s18113917