Smart Ocean: A New Fast Deconvolved Beamforming Algorithm for Multibeam Sonar


Abstract
:1. Introduction
2. Beamforming and Deconvolution
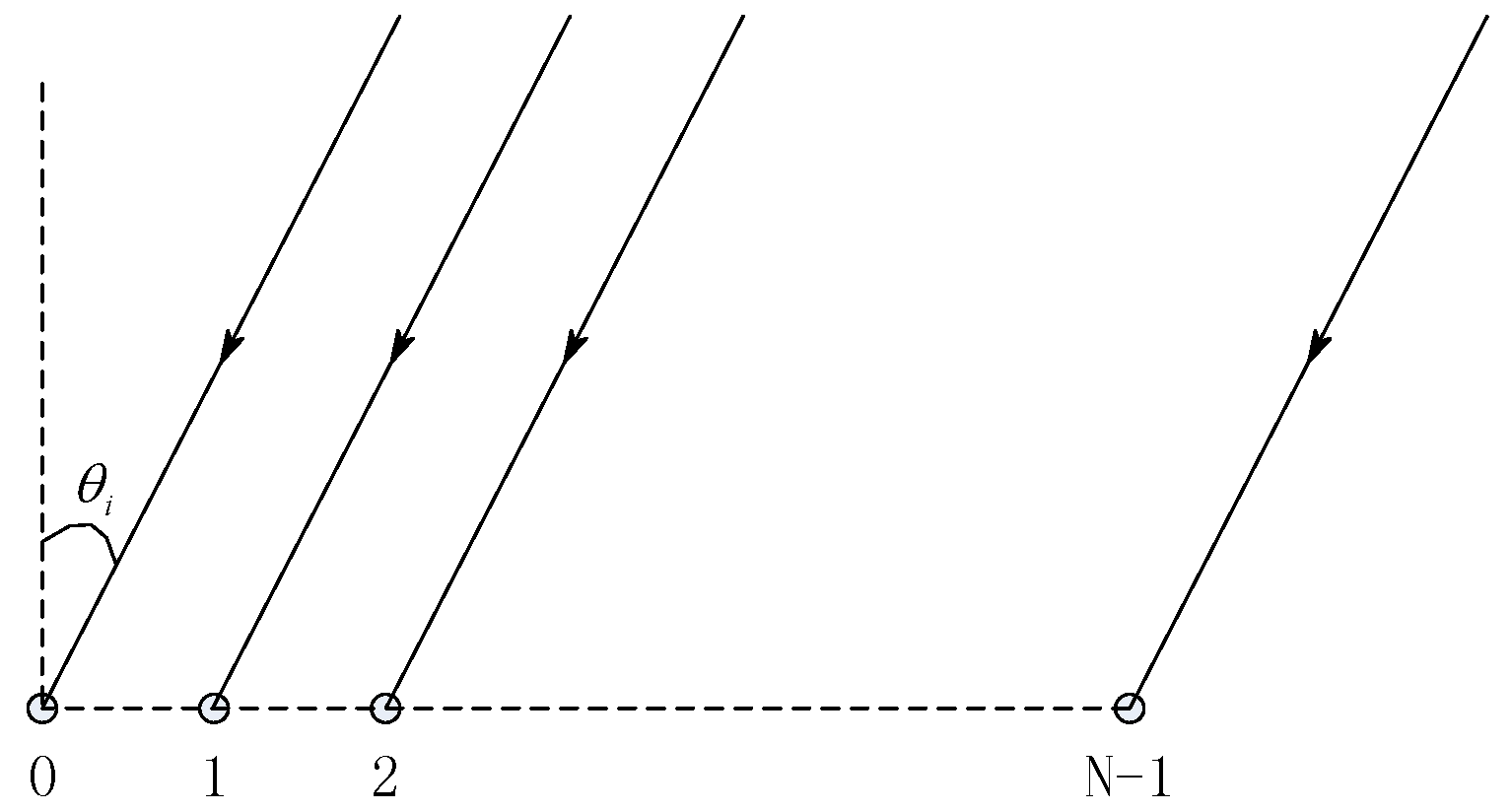
2.1. Conventional Beamforming
2.2. Deconvolved Beamforming
2.2.1. The Equivalent Process of CBF
2.2.2. R–L Algorithm
2.2.3. Fast R–L Algorithm
| Algorithm 1: R–L algorithm. |
| Initialization: (or ), is the number of elements of or the number of beams. for = 1, 2, 3, … { ; Estimate F at the iteration time ; Estimate S at the iteration time } |
| Algorithm 2: Fast R–L algorithm. |
| Initialization: (or ), is the number of elements of , or the number of beams. ; Calculate the fast Fourier transform of and denotes the fast Fourier transform operation. for =1, 2, 3, … { ; Calculate the Fourier transform of ; Calculate the Fourier transform of ; Calculate the inverse Fourier transform of and denotes inverse fast Fourier transform operation. ; ; denotes the conjugate of }. |
2.2.4. Accelerated R–L Algorithm and Fast Accelerated R–L Algorithm
| Algorithm 3: Accelerated R–L algorithm. |
| Initialization: (or ), is the number of elements of or the number of beams. for =3,4,… { ; Predict at the iteration time ; Predict F at the iteration time ; Estimate S at the iteration time ; Calculate the gradient of S at the iteration time ; Calculate the acceleration factor at the iteration time } |
| Algorithm 4: Fast Accelerated R–L algorithm. |
|
Initialization: |
3. Experimental Results
3.1. Computation Complexity Analysis
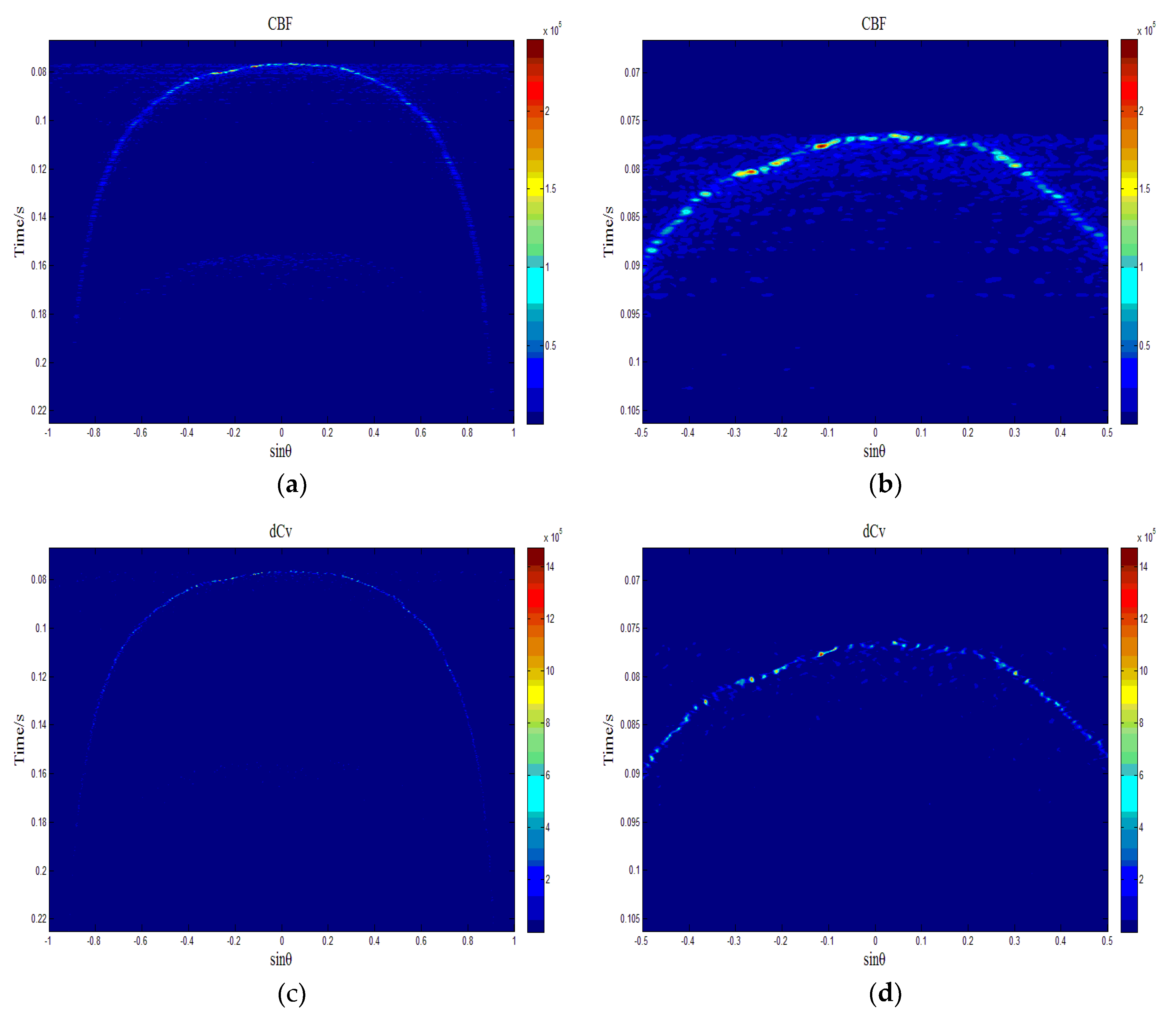
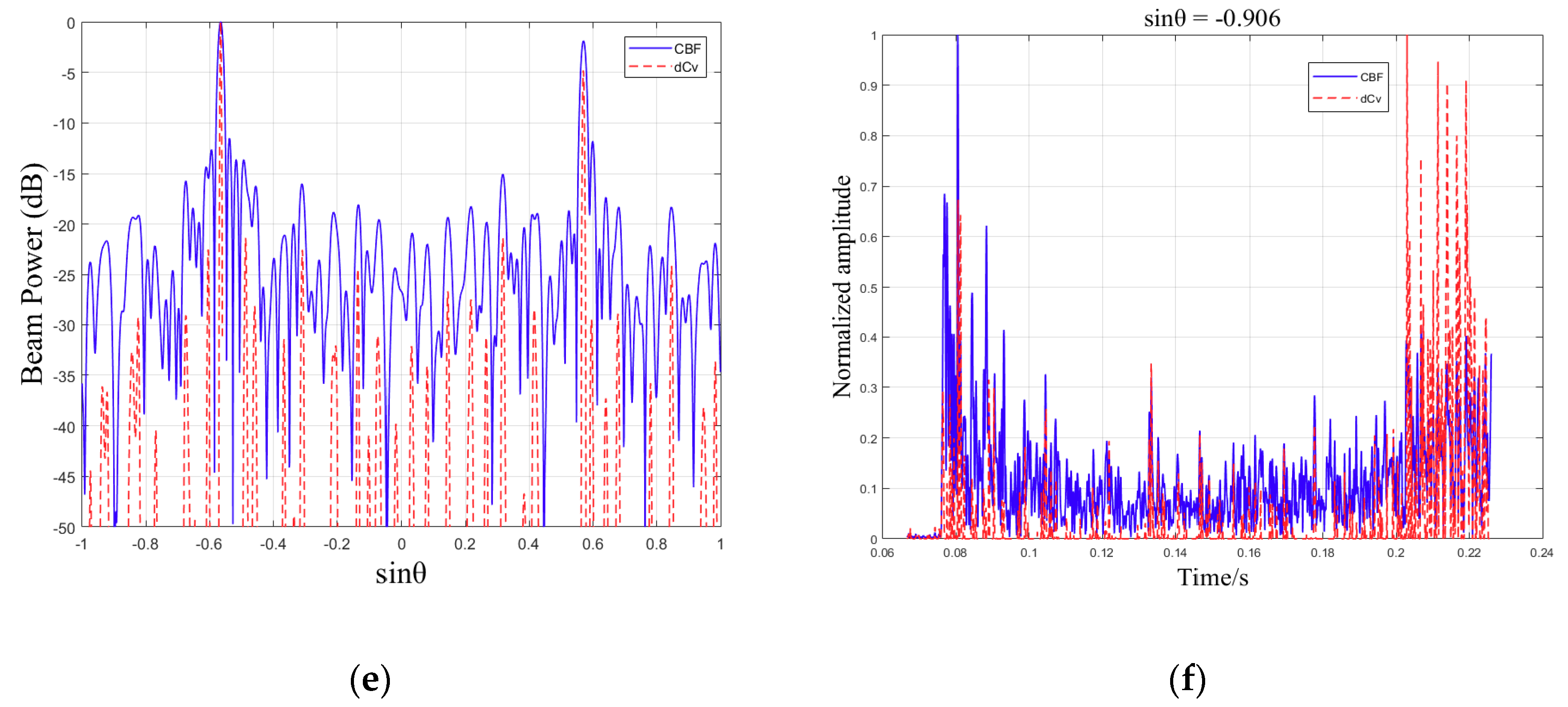
3.2. Simulation Data Experiment
3.3. Real Data Experiment
3.3.1. Experimental Data Results of the Multibeam Sonar System
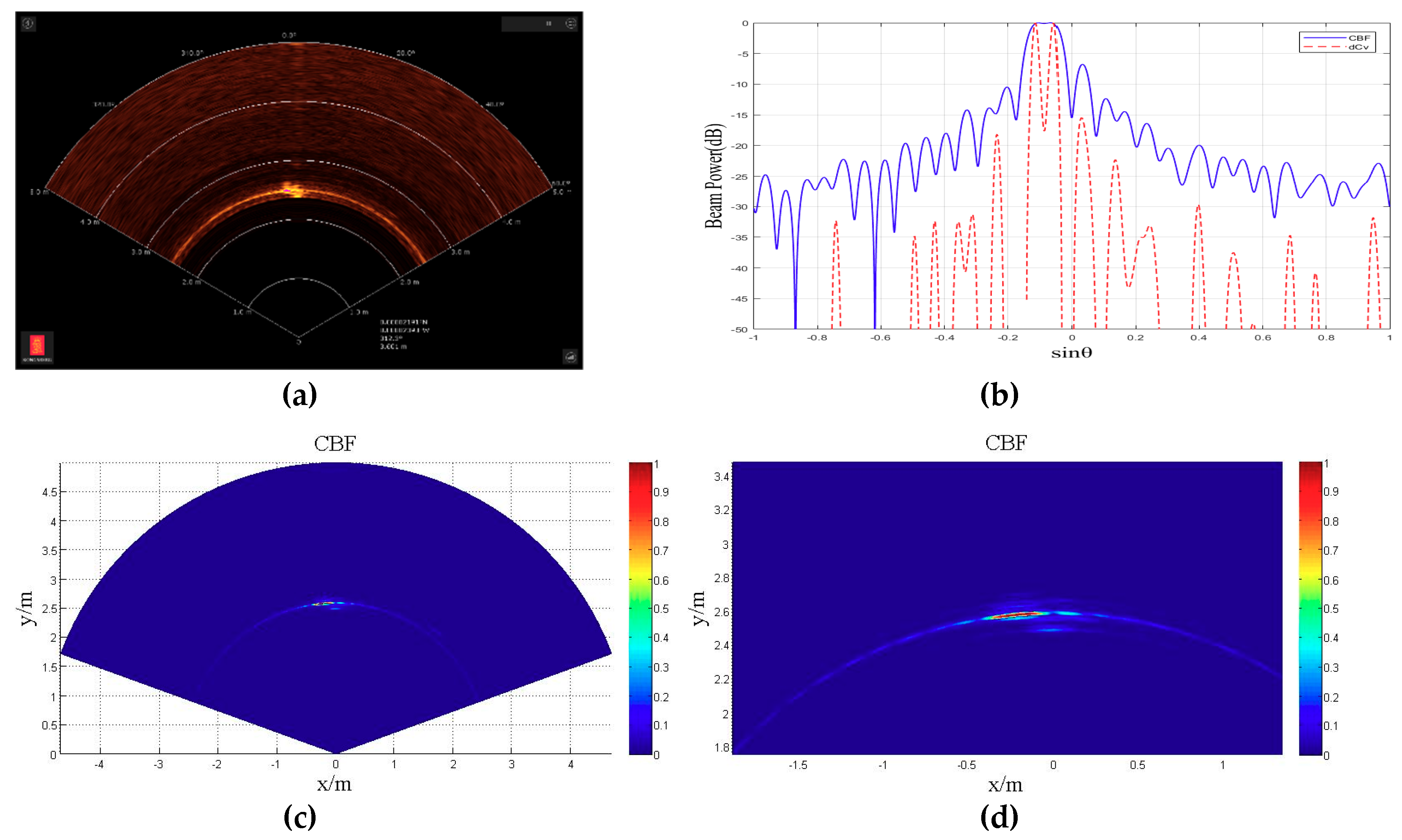
3.3.2. Experimental Data Results of Kongsberg M3 Multibeam Sonar
Two Small Ball Targets Experiment
Imaging Experiment of Pool Wall
4. Summary and Discussion
Author Contributions
Funding
Conflicts of Interest
References
- Han, G.; Shen, S.; Song, H.; Yang, T.; Zhang, W. A Stratification-Based Data Collection Scheme in Underwater Acoustic Sensor Networks. IEEE Trans. Veh. Technol. 2018, 67, 10671–10682. [Google Scholar] [CrossRef]
- Han, G.; Jiang, J.; Bao, N.; Wan, L.; Guizani, M. Routing Protocols for Underwater Wireless Sensor Networks. IEEE Commun. Mag. 2015, 53, 72–78. [Google Scholar] [CrossRef]
- Han, G.; Jiang, J.; Sun, N.; Shu, L. Secure Communication for Underwater Acoustic Sensor Networks. IEEE Commun. Mag. 2015, 53, 54–60. [Google Scholar] [CrossRef]
- Han, G.; Jiang, J.; Shu, L.; Guizani, M. An Attack-Resistant Trust Model based on Multidimensional trust Metrics in Underwater Acoustic Sensor Networks. IEEE Trans. Mob. Comput. 2015, 14, 2447–2459. [Google Scholar] [CrossRef]
- Yang, T.C. Deconvolved Conventional Beamforming for a Horizontal Line Array. IEEE J. Oceanic Eng. 2017, 43, 160–172. [Google Scholar] [CrossRef]
- Cox, H.; Zeskind, R.M.; Owen, M.H. Robust adaptive beamforming. IEEE Trans. Signal Process. 1987, 10, 1365–1376. [Google Scholar] [CrossRef]
- Stoica, P.; Wang, Z.; Li, J. Robust Capon beamforming. IEEE Signal Process. Lett. 2003, 10, 172–175. [Google Scholar] [CrossRef] [Green Version]
- Reed, I.S.; Mallett, J.D.; Brennan, L.E. Rapid convergence rate in adaptive arrays. IEEE Trans. Aerosp. Electron. Syst. 1974, AES-10, 853–863. [Google Scholar] [CrossRef]
- Baggeroer, B.; Cox, H. Passive sonar limits upon nulling multiple moving ships with large aperture arrays. In Proceedings of the Conference Record of the Thirty-Third Asilomar Conference on Signals, Systems, and Computers (Cat. No.CH37020), Pacific Grove, CA, USA, 24–27 October 1999; pp. 103–108. [Google Scholar]
- Lyons, A.P.; Abraham, D.A. Statistical characterization of high-frequency shallow-water seafloor backscatter”. J. Acoust. Soc. Am. 1999, 106, 1307–1315. [Google Scholar] [CrossRef]
- Hellequin, L.; Boucher, J.; Lurton, X. Processing of High-Frequency Multibeam Echo Sounder Data for Seafloor Characterization. IEEE J. Oceanic Eng. 2003, 28, 78–98. [Google Scholar] [CrossRef]
- Hellequin, L. Statistical characterization of multibeam echo sounder data. In Proceedings of the IEEE Oceanic Engineering Society. OCEANS’98, Nice, France, 28 September–1 October 1998; pp. 228–233. [Google Scholar]
- Richardson, W.H. Bayesian-based iterative method of image restoration. J. Opt. Soc. Am. 1972, 62, 55–59. [Google Scholar] [CrossRef]
- Lucy, L.B. An iterative technique for the rectification of observed distributions. Astron. J. 1974, 79, 745–754. [Google Scholar] [CrossRef]
- Biggs, D.S.; Andrews, M. Acceleration of iterative image restoration algorithms. Opt. Soc. Am. 1997, 36, 1766–1775. [Google Scholar] [CrossRef]
- Weng, N.; Li, H.; Yao, B.; Zhou, T. Tunnel Effect in Multi-beam Bathymetry Sonar and Its Canceling with Error Feedback Lattice Recursive Least Square Algorithm. In Proceedings of the OCEANS 2008—MTS/IEEE Kobe Techno-Ocean, Kobe, Japan, 8–11 April 2008; pp. 1–5. [Google Scholar]
- De Moustier, C. State of the art in swath bathymetry survey systems. Int. Hydr. Rev. 1988, 65, 25–54. [Google Scholar]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Algorithm | Multiplicative Times per Iteration |
|---|---|
| 1 | |
| 2 | |
| 3 | |
| 4 |
| Algorithm | Fast | Accelerated | Computation Complexity |
|---|---|---|---|
| 1 | NO | NO | Most |
| 2 | YES | NO | More |
| 3 | NO | YES | Less |
| 4 | YES | YES | Least |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Huang, J.; Zhou, T.; Du, W.; Shen, J.; Zhang, W. Smart Ocean: A New Fast Deconvolved Beamforming Algorithm for Multibeam Sonar. Sensors 2018, 18, 4013. https://doi.org/10.3390/s18114013
Huang J, Zhou T, Du W, Shen J, Zhang W. Smart Ocean: A New Fast Deconvolved Beamforming Algorithm for Multibeam Sonar. Sensors. 2018; 18(11):4013. https://doi.org/10.3390/s18114013
Chicago/Turabian StyleHuang, Jie, Tian Zhou, Weidong Du, Jiajun Shen, and Wanyuan Zhang. 2018. "Smart Ocean: A New Fast Deconvolved Beamforming Algorithm for Multibeam Sonar" Sensors 18, no. 11: 4013. https://doi.org/10.3390/s18114013
APA StyleHuang, J., Zhou, T., Du, W., Shen, J., & Zhang, W. (2018). Smart Ocean: A New Fast Deconvolved Beamforming Algorithm for Multibeam Sonar. Sensors, 18(11), 4013. https://doi.org/10.3390/s18114013