1. Introduction
Tubular structures are widely used in bridges, underground pipes, pipelines and high-rise buildings, etc. Due to environmental impacts, material aging effects and overloading, these tubular structures may experience various forms of interfacial damage during the construction and service phase, and their whole lifespan reliability might be reduced to a certain extent. Therefore, it is necessary to monitor or identify the interfacial defects such as debonding in tubular structures by using non-destructive testing (NDT) methods [
1,
2,
3,
4].
The existing damage detection (DD) and structural health monitoring (SHM) methods are usually classified into artificial percussion methods, ultrasound-based methods, optical fiber-based methods and so on. However, these technologies usually need to be used for examining the monitored tubular structure point by point, which is time-consuming, laborious and cumbersome during the detection process. The ultrasonic guided wave (UGW)-based detection technology can overcome those disadvantages with its many advantages, such as high efficiency, high speed and wide range of detection, and has been widely used in structural defect detection [
5]. As the wave is traveling back and forth between the interfaces that make up the waveguide, the round-trip wave produces a complex waveform and interferences. If the guided wave propagates over an infinite plate or a pipe at two parallel interfaces, it will travel along the plate or pipe surface. Therefore, as the guided wave propagates through a cylindrical shell, a rod and a layered elastic body, it will generally propagate along their axial directions. Therefore, flat plates and cylindrical shells, rods and laminated elastic bodies are typical waveguides for guided wave propagations [
6,
7]. Because of the multi-modes and frequency dispersion characteristics of an UGW, it becomes very complicated during excitation, propagation and reception. In order to make a better use of UGWs to detect damages in structures, a proper mode and frequency of the guided wave should be firstly selected and applied in DDs and SHMs. The dispersion curves which show the relationship between group or phase velocities and frequencies for UGWs have become an important reference, and this becomes a prerequisite for the use of UGWs in a test or engineering. Especially, as the time of flight (ToF) method is used for defects localization, the frequency dispersive characteristics of the selected UGW is quite dominated for evaluating the guided wave group (or phase) velocity. Based on the UGW theory, this paper aims to propose a novel method for describing the UGW propagation characteristics in different interfaces, and lay a foundation for the UGW-based tubular structure damage detection or health monitoring.
Research into guided waves and their applications in engineering has a long history and has produced plenty of fruitful research. The objective of an investigation on guided waves can be classified into four stages, which are the stages of plate structures with free boundary, hollow cylindrical shells, multi-layer composite pipelines, and composite structures such as concrete filled steel tubes (CFST). The research results have covered from simple issues to complicated ones.
Rayleigh [
8] and Lamb [
9] studied the propagation properties of the elastic waves in a free state in an isotropic elastic plate, and obtained the transcendental equation of the monolayer isotropic elastic plate, named the Rayleigh-Lamb transcendental equation. Later, Lamb obtained the wave equation under the free boundary condition of the plate, and obtained a special set of wave solutions, which promoted the development of guided wave theory.
For hollow cylindrical shells, Ghosh [
10] first carried on the linear solution derivation of guided wave transmission. Then, Love [
11] described a stress wave propagation analysis. Cooper and Naghdi [
12] and Naghdi and Cooper [
13] used the same theory to further study and analyze the propagation law of non-axisymmetric waves in a hollow cylindrical shell, respectively, but never obtained a comprehensive numerical solution for the guided wave propagation in the cylindrical shell structure. Finally, Gazis [
14] on the basis of the existing results, analyzed the imperfections of the plate and shell theory, and used the linear elasticity theory to solve the infinite long isotropic cylindrical shell problem. Gazis [
15,
16] also obtained the dispersion equation of the longitudinal mode and the torsion mode, and the dispersion curve of the multi-mode was drawn by a numerical calculation, and the cutoff frequency of each mode was obtained according to the dispersion curve.
For a multilayer structure system, the research methods are classified as the transfer matrix method, global matrix method, analytic method, numerical analysis method and semi-analytical finite element method, etc. Lowe [
17,
18] used the transfer matrix method to establish the dispersion equation of Lamb wave in a multilayer plate, then, he deduced the dispersion equation of the guided wave in the layered cylinder. Markus et al. [
19], and Yuan and Hsieh [
20] used the analytical method to study the propagation characteristics of the wave in the free composite cylindrical shell. Xi et al. [
21] studied the wave propagation characteristics in evacuated composite cylindrical shells and liquid filled composite cylindrical shells by a semi-analytical method. Huang et al. [
22] studied the dispersion characteristics of waves in composite cylindrical shells by a numerical dispersion method. Based on axisymmetric guided waves, Du et al. [
23] analyzed the differences between the interface changes, and explored the dispersion equations of cylindrical composite structures, and obtained the dispersion equation of a weakly confined interface double layer cylindrical structure in the interface spring model. In addition, experiments were carried out on the double layered composite cylindrical structure. The double layered composite rods are filled with liquid with the inner layer free interface and zero inner radius, obtaining the phase velocity which is an effective factor of interface characteristics of low order guided waves.
The mechanism for guided wave propagation in multilayer composite cylindrical structures can be extended into composite structures. For example, Xu et al. [
24] showed that guided waves can be applied in concrete filled steel tubular structures to detect damages such as interfacial debonding between concrete and steel pipe, and the filled concrete can be considered as a boundary of the steel pipe.
So far, the propagation characteristics of UGWs in tubular structures filled with air (hollow) or liquid have been extensively studied and applied in damage detection. The current challenging issue is that the characteristics of UWGs propagating in different interfaces have not been systematically studied and applied in engineering. A systematic and effective method for detecting interface damage using UWGs is actually required. However, one of challenges for DDs and SHMs using UGWs is the frequency dispersion influence, especially considering boundary conditions, on the UGW propagation which makes it much complicated and reduces the precision of DD and SHM evaluations. Therefore, this paper takes the tubular structures as the research objective, and numerical analysis is used to solve the dispersion equation of the guided wave in the tubular structures with different interfacial boundary conditions. Then, the MATLAB software is applied to analyze and draw the group velocity and phase velocity dispersion curves. The developed frequency dispersion curves are finally validated by an experiment. This paper also simulates the interface debonding by setting the artificial damage, the appropriate actuation frequency is selected according to the dispersion curve, and the damage is identified by the signal energy method. The feasibility of using the energy method to detect the interface damage is verified, which can lay a foundation for the detection of interface damage of tubular structures by using UGWs.
3. Experimental Verification of Dispersion Curves
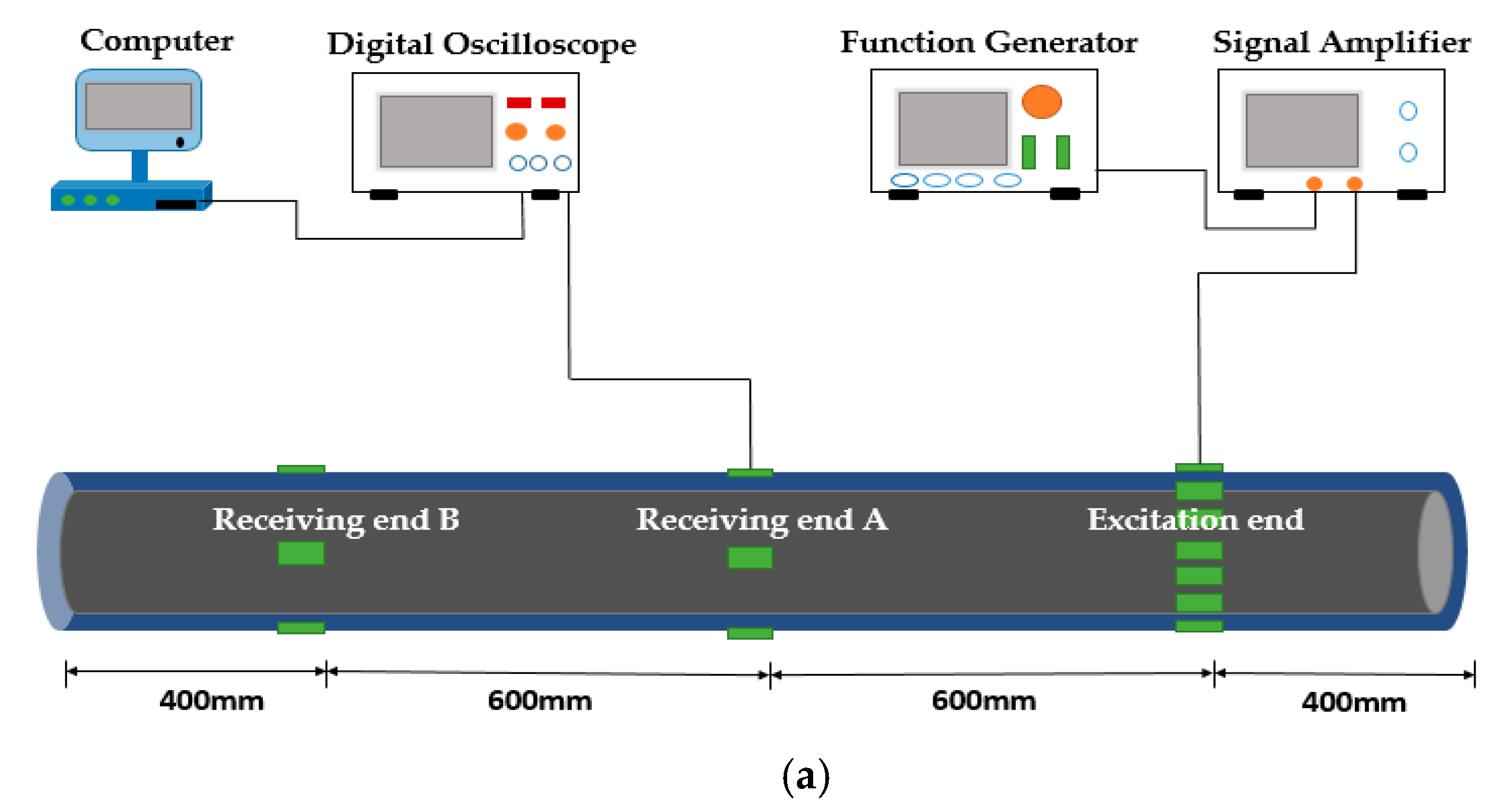
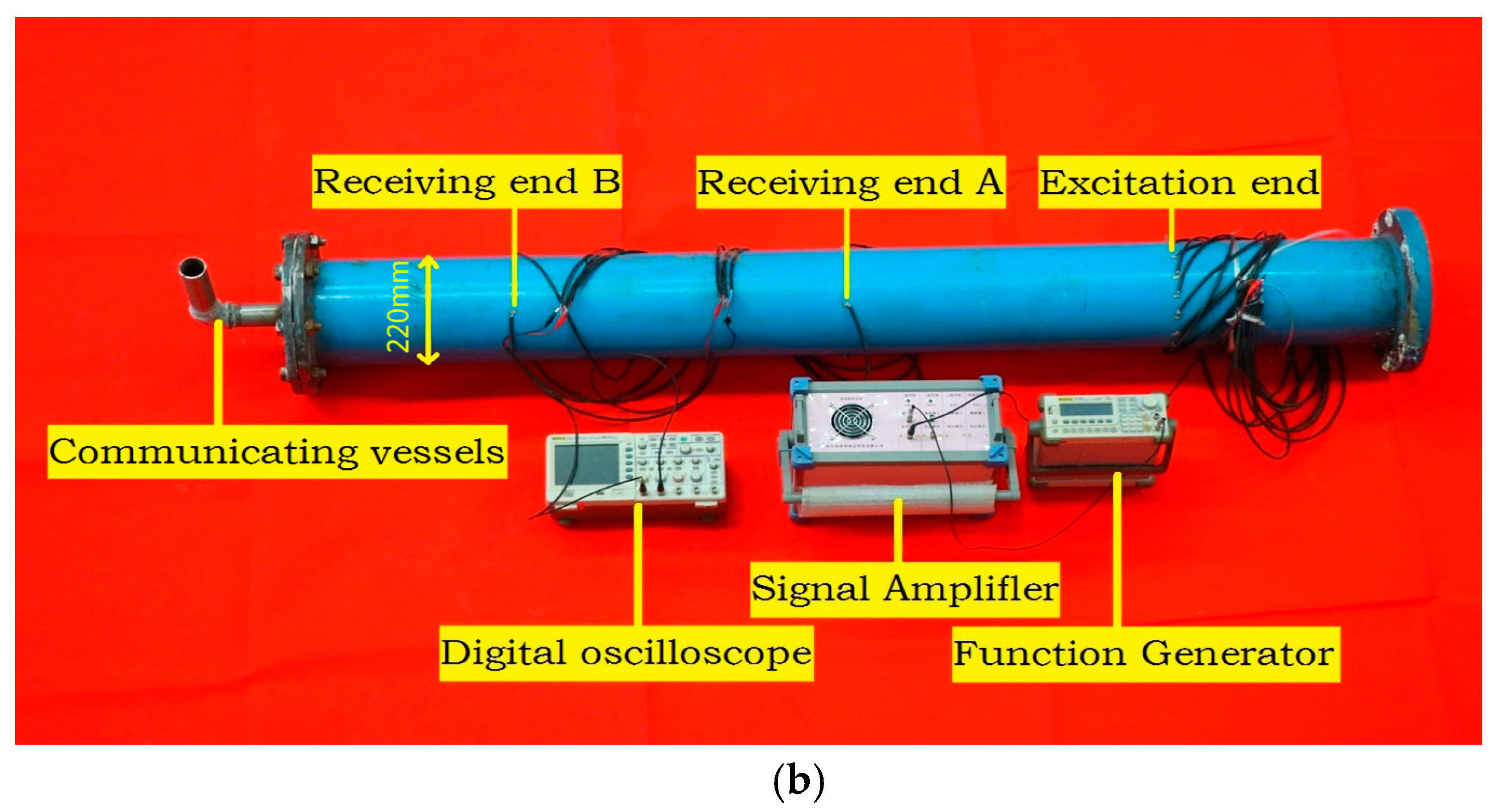
The objective of the experiment is to validate the accuracy for the dispersion curves of the tubular structures under different internal boundary conditions. Therefore, an experimental system that uses piezoceramics as transducers to excite and receive ultrasonic guided waves is designed. As shown in
Figure 7, the tubular structure is 2 m long, the diameter is 220 mm, and the wall thickness is 6 mm, which is filled in air (hollow), water and concrete, respectively. The tested pipe is sealed at one end and a communicating vessel at the other end to ensure that the liquid in the tube is fully filled. The experimental setup includes a function generator for generating the guided wave with the given frequency, a signal amplifier for amplifying the signal voltage to meet the requirement of the experiment, and a digital oscilloscope for receiving and restoring the data. The tubular structure is used as the test specimen where piezoceramic (lead zirconate titanate, PZT) patches are pasted on the surface of it to be used as transducers. At the excitation end, a group of 16 PZT patches are used as actuators to generate a guided wave of L(0, 2) mode with the expected frequencies [
25]. The selection of the L(0, 2) mode is because the UGW with the mode is not only typically and widely applied in DDs and SHMs, but also has the fast propagation velocity, weak frequency dispersion, and the minimized mode conversion and superposition effects at boundaries, which is much beneficial for the data processing of the received guided waves. The other group of PZT patches is used as sensors which are separately located at the positions A and B, 600 mm away from each other. The actuators are activated to generate the guided waves propagating along the tubular structures and being received simultaneously at two points of A and B. The arrival time difference of the signal packages can be extracted to calculate the group velocities according to the given distance by using the time of flight method.
As shown in
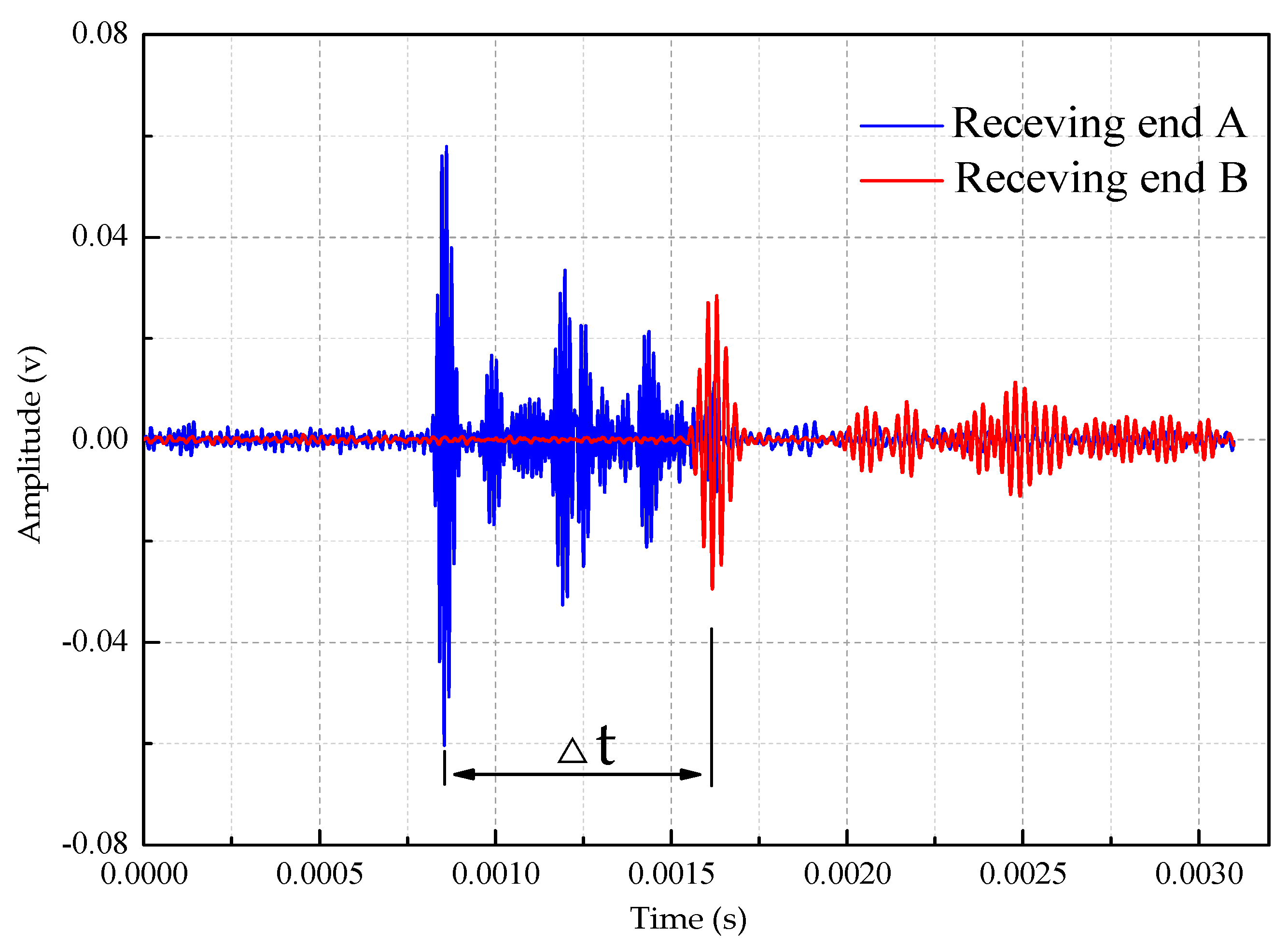
Figure 8, a five peak impulse signal modulated by Hanning window function is applied in the tubular structure which is filled in water and taken as an example to show how to calculate the signal arrival time difference, and the wave arrival time corresponding to the peak of the first arrival wave package is used to calculate the time arrival difference. The center frequency of the signal is 70 kHz and the excitation amplitude is ±10 V.
It can be seen from
Figure 8, the time difference between the head wave of the ultrasonic guided wave reaching the two points A and B is:
It is known that the distance between two points of A and B is 600 mm, then the wave velocity can be calculated as:
The same method is used to measure the signal time difference for the three kinds of interfacial boundary conditions.
Table 3,
Table 4 and
Table 5 is the measured value of the guided wave velocity at different frequencies under different boundary conditions, respectively.
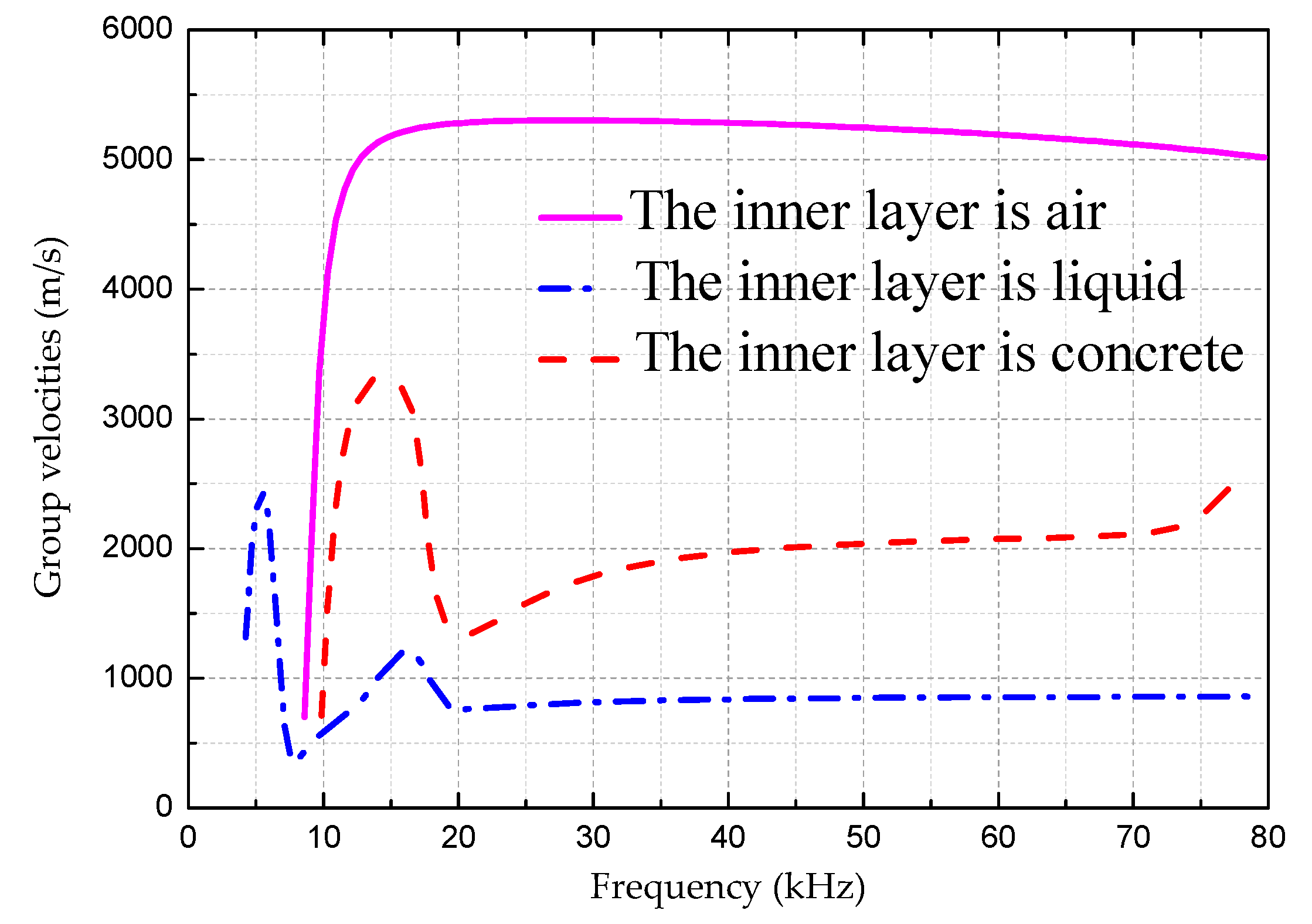
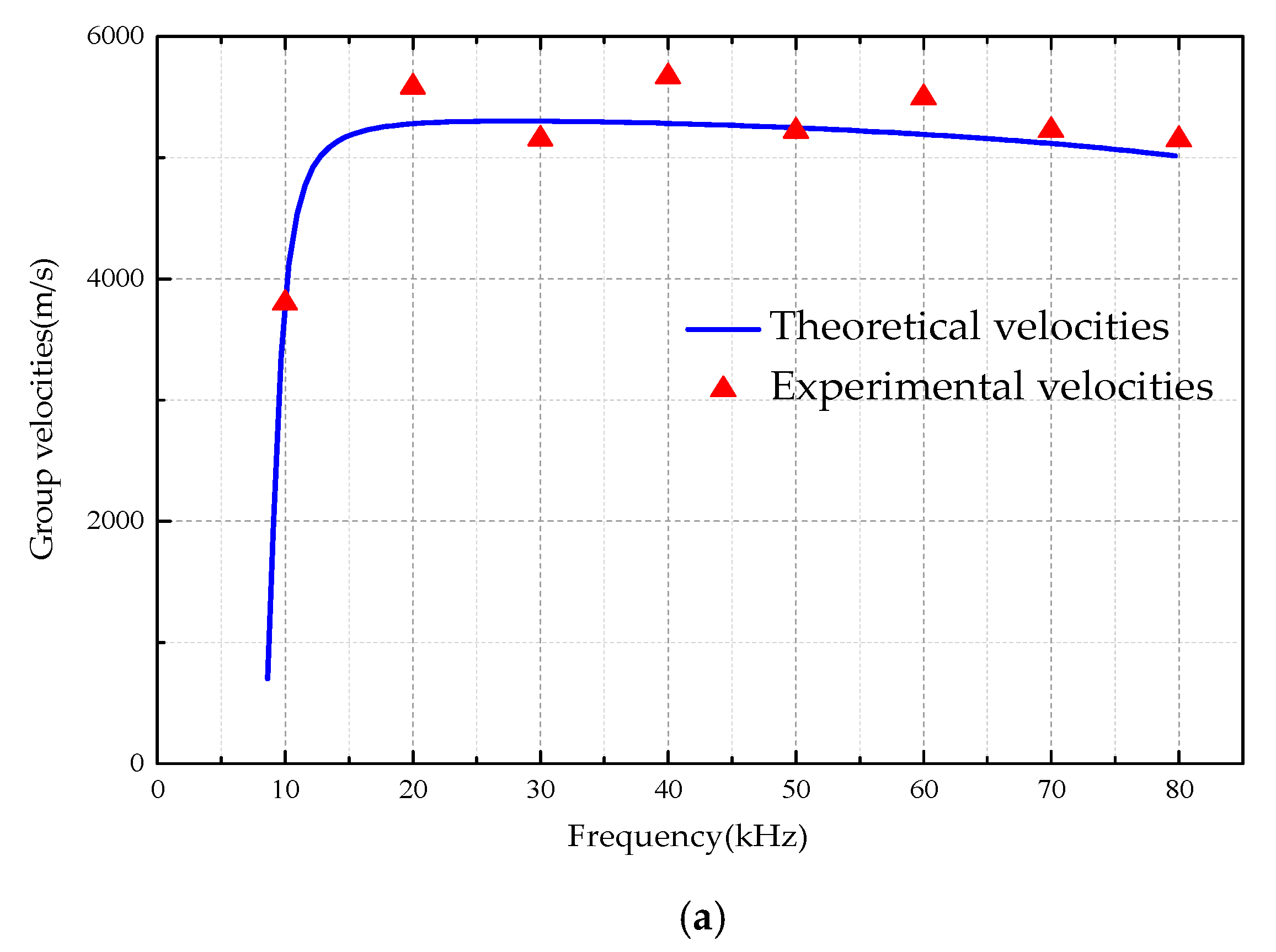
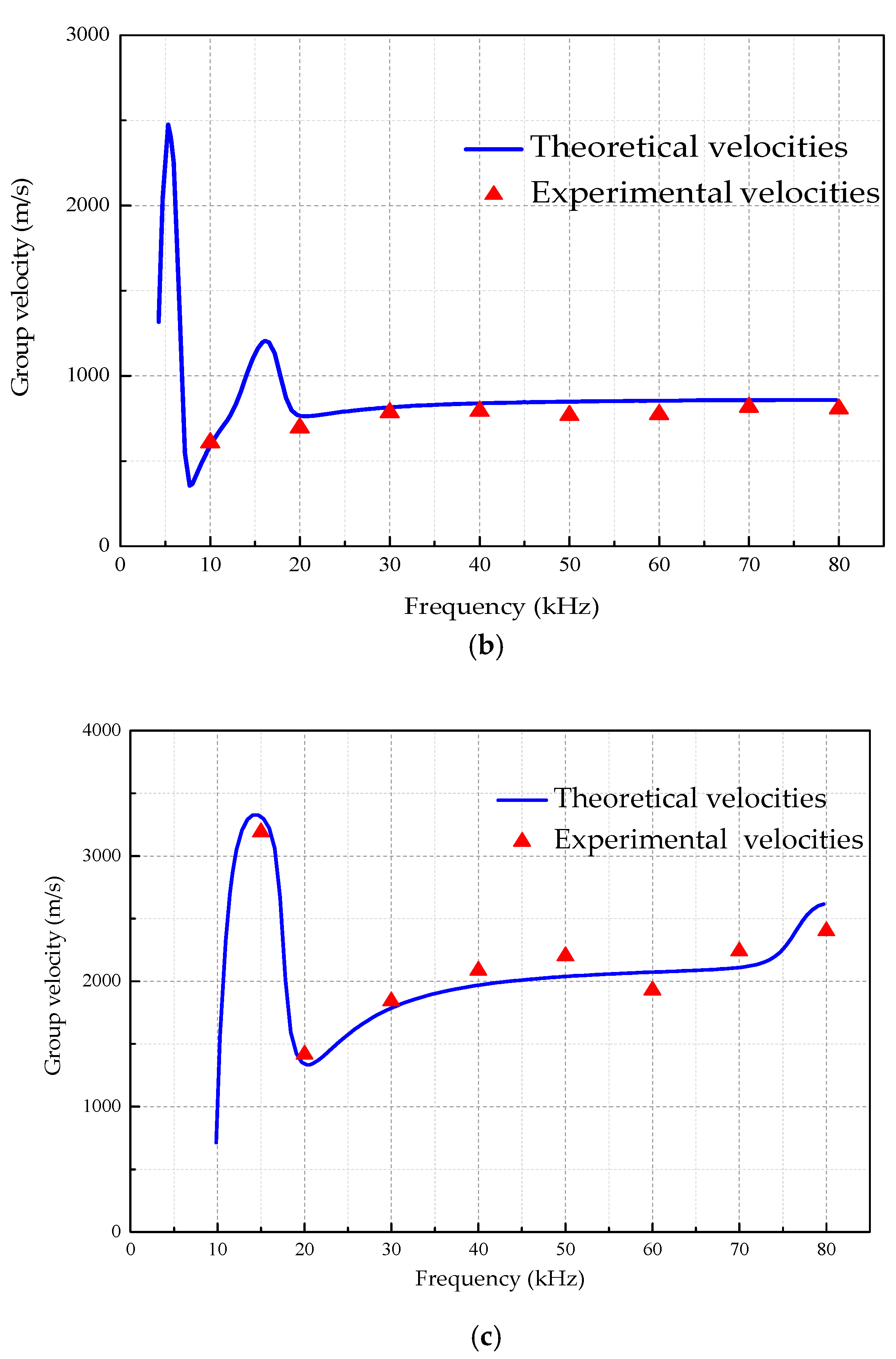
Figure 9 is a comparison of guided wave velocity under different boundary conditions.
From
Table 3,
Table 4 and
Table 5 as well as
Figure 9, due to the accuracy of the test setup and the interference of the on-site environment, there is a certain error between the measured value and the theoretical one, but it can be seen that the maximum error between theoretical results is very close. This validates the correctness and effectiveness of the dispersion curves of the UGWs propagating in the tubular structures under different boundary conditions.
4. Damage Identification Experiment
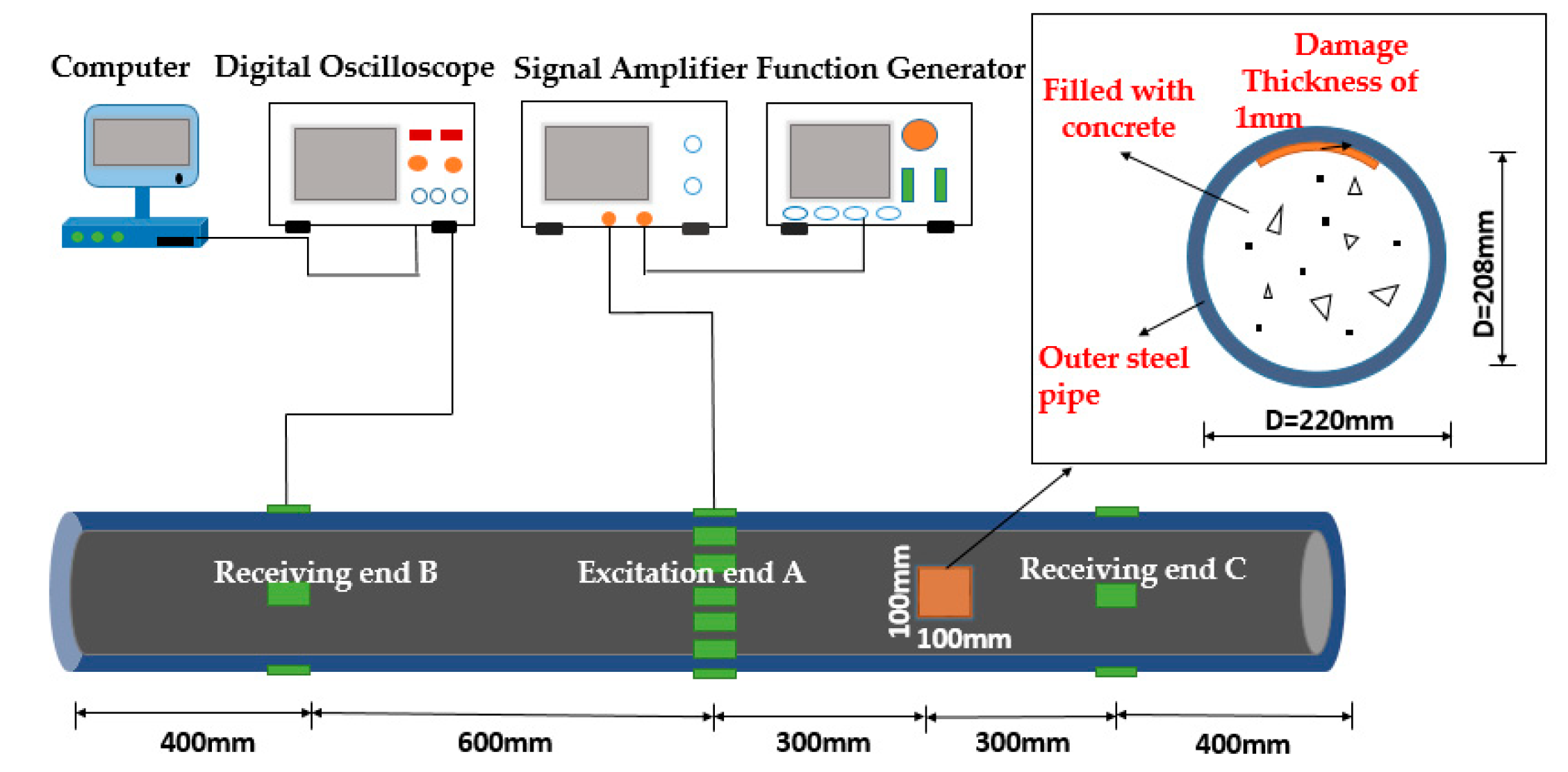
In order to validate the efficiency of theoretical analysis results and better use the dispersion curves to detect the interface damages, an experimental system is designed as shown in
Figure 10. The tested object is a CFST column with artificial interfacial damage. The CFST column has a length of 2 m, a diameter of 220 mm and a wall thickness of 6 mm, and the concrete strength is C30 according to the corresponding design code of China. A thin film of 100 mm × 100 mm × 1 mm is artificially arranged inside the pipe wall before casting concrete to simulate interfacial debonding damage between concrete and steel tubular wall. The thickness of the thin film is 1 mm to simulate slight damage in the actual situation. The width (length) of the sheet of 100 mm is selected because of one more wavelength of the actuated UGW which is more conducive to damage detection. PZTs are arranged and symmetrically pasted on the surface of the CFST column at A, B and C locations, respectively. Point A is the excitation location, and point B and C are the reception points. It is assumed that the AB segment is in a healthy state, and the BC segment is in a damaged state. The two segments will be used to compare for identifying the damage by UGW-based method. The experimental setup is as the same as the above-mentioned one.
As shown in
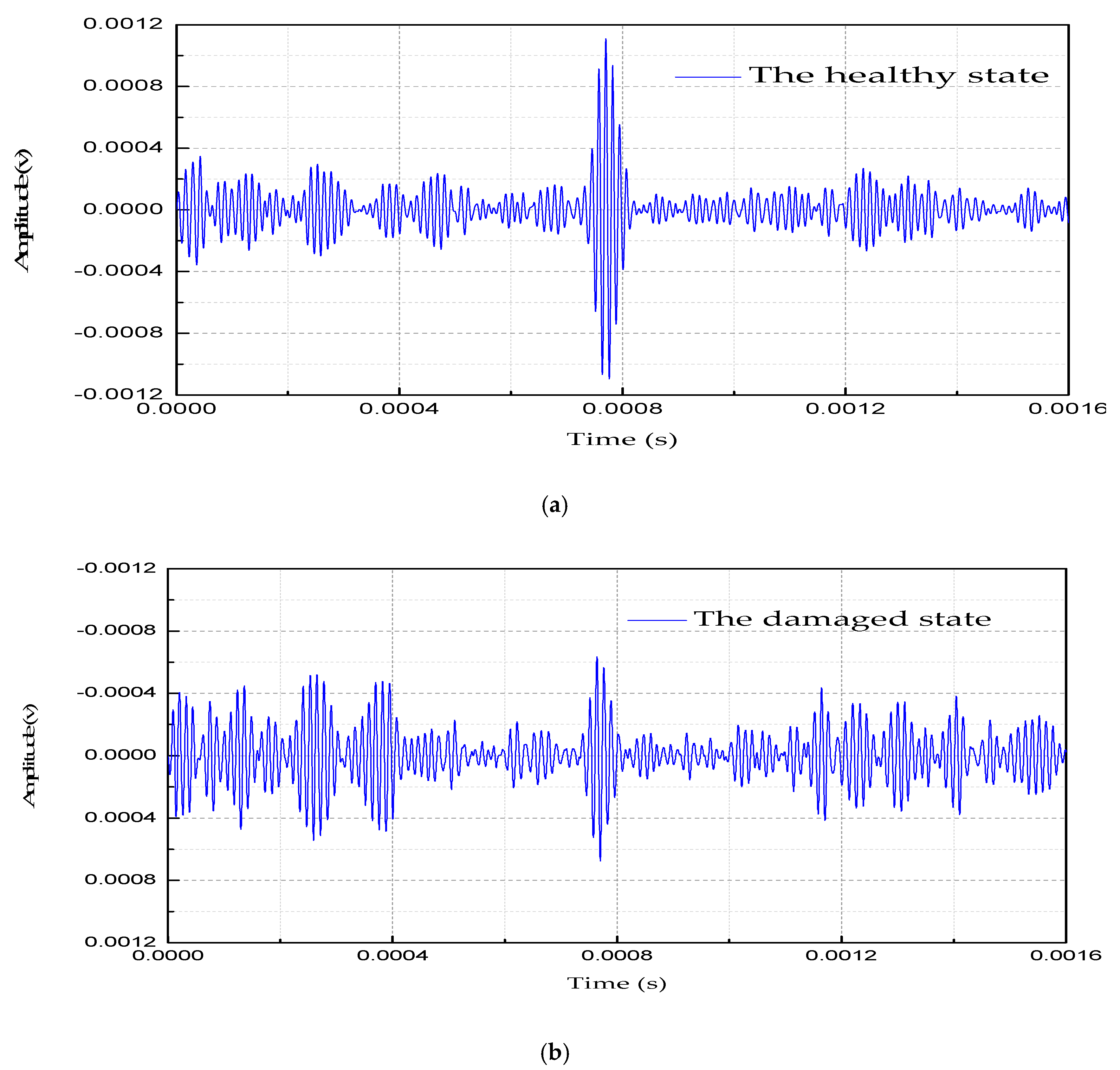
Figure 11, a five peak impulse signal modulated by Hanning window function is applied in the CFST column. The signal with the center frequency of 60 kHz and the excitation amplitude of ± 10 V is activated, the L(0, 2) mode guided wave is simultaneously propagating along two direction of the CFST column, and the signals are received by PZT sensors located at the points A and B, respectively.
From
Figure 11, we can see that the signal amplitude in the healthy state is obviously greater than that in a damaged state. This is because the existence of the interfacial damage weakens the propagation of the UGWs and causes the sensor signal energy to decrease. The signal energy-based method is used to set up the damage identification variables and index to experimentally evaluate the damage level.
The amplitude of a sensor signal is an ideal parameter for damage identifications by using wave-based method. In general, damages may attenuate the amplitude of the sensor signal, and the amplitude attenuation degree may increase with development of the damages. The amplitude of the sensor signal is one of the external manifestations of the UGW energy. Therefore, the energy of the sensor signal can be used as a characteristic parameter to qualitatively identify structural damages. [
24,
28]. The sensor signal is a group of discrete values and the signal energy can be calculated by Equation (40), and the signal energy is applied as the damage identification variable:
in which,
x(
n) is the signal corresponding to the discrete sequence;
n is the sampling point.
The guided wave signal will undergo the energy attenuation during the propagation in component, and the relative percentage of the energy of the received signal to that of the excitation signal is defined as the attenuation index. As shown in the Equation (41):
where α is the attenuation index;
E is the sensor energy which can be calculated by Equation (40);
Em is the actuation signal energy, which comes from the oscilloscope reading by directly connecting the actuation electrical wire to the oscilloscope.
When the performance of the structural material is unchangeable, the attenuation of the signal energy is mainly affected by the excitation frequency. As shown in
Table 6 is the relationship between the excitation frequency and the received energy and attenuation coefficient.
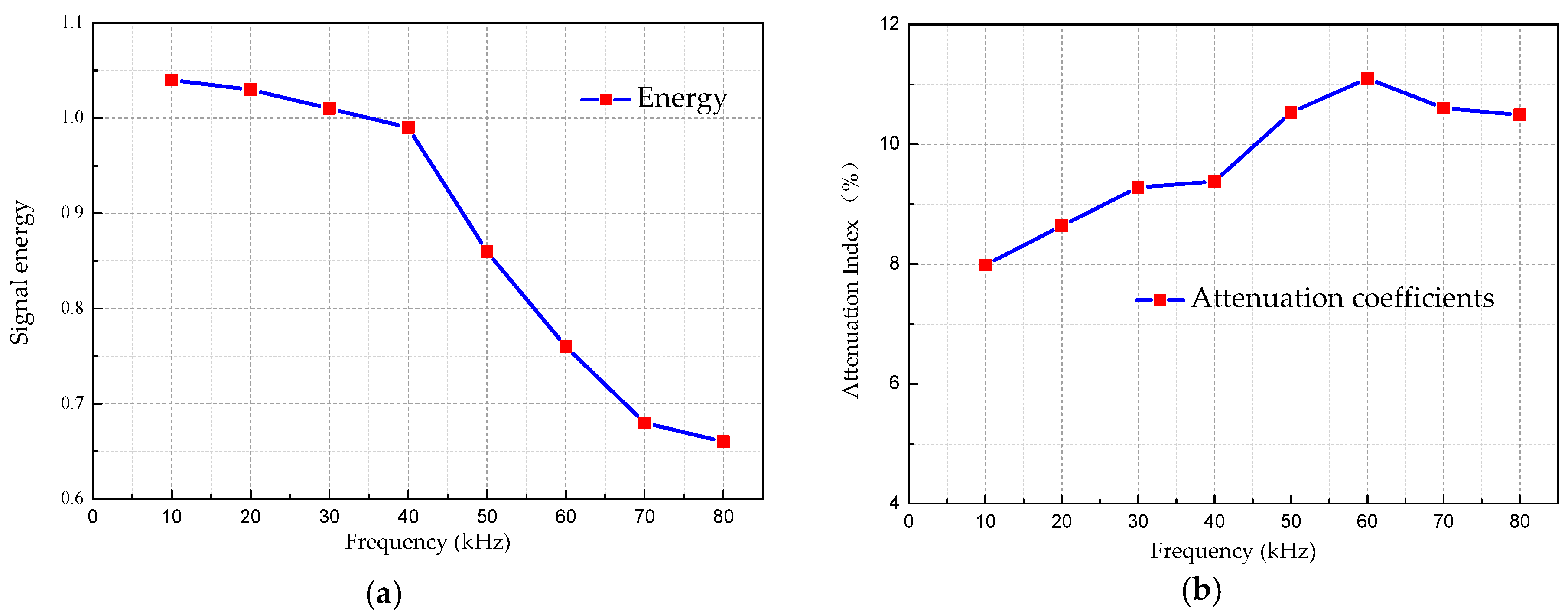
Figure 12 is the relationship curve between the attenuation coefficient and the excitation frequencies.
As can be seen from
Figure 12a, as the frequency increases, the signal energy attenuation is more obvious. The attenuation coefficient increases with the increase of frequency at low frequency range, and becomes nearly flat after reaching 60 kHz, as shown in
Figure 12b.
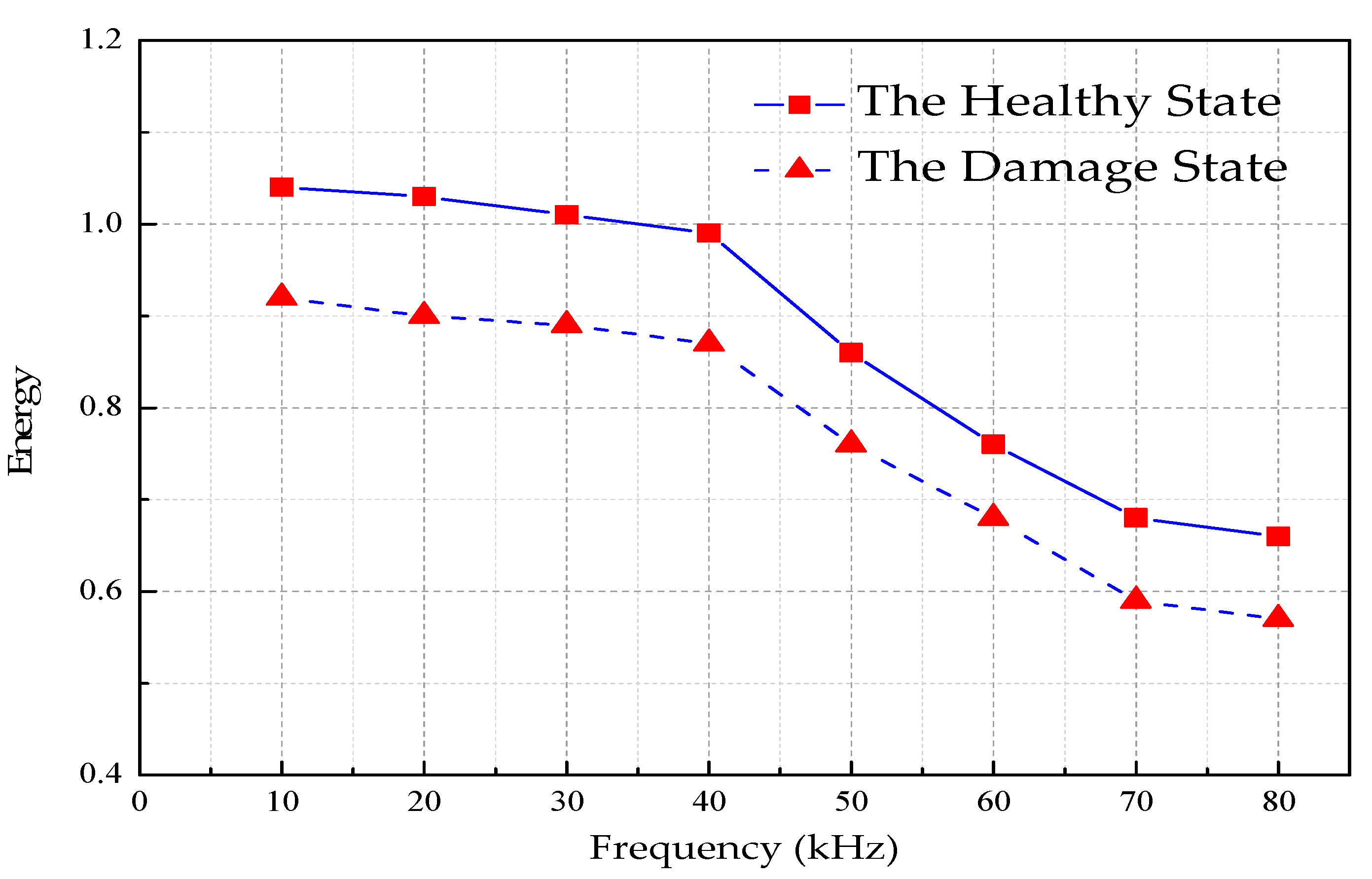
The UGWs with the same frequency is actuated, and the guided wave is propagating along the healthy CFST segment and the damaged CFST segment, and all other parameters are the same except the damage. The received signal energy values are shown in
Table 7. The comparison curve of received signal energy under healthy state and damage state is shown in
Figure 13.
It can be seen from the
Figure 13 that after the UGWs with the same frequency propagate for the same distance in the CFST, but the energy attenuation is different between the healthy state and the damaged one. In the damaged state, the energy attenuation is more obvious than that in the healthy one. The percentage of the energy value in the damaged state and the healthy state is redefined as the damage variable, as shown in Equation (42):
where
Er is the sensor signal energy ratio for the damaged state;
Eh is the sensor signal energy ratio for the healthy state. For the healthy state,
Er =
Eh , and
H = 1. Therefore, the corresponding damage index can be defined as Equation (43):
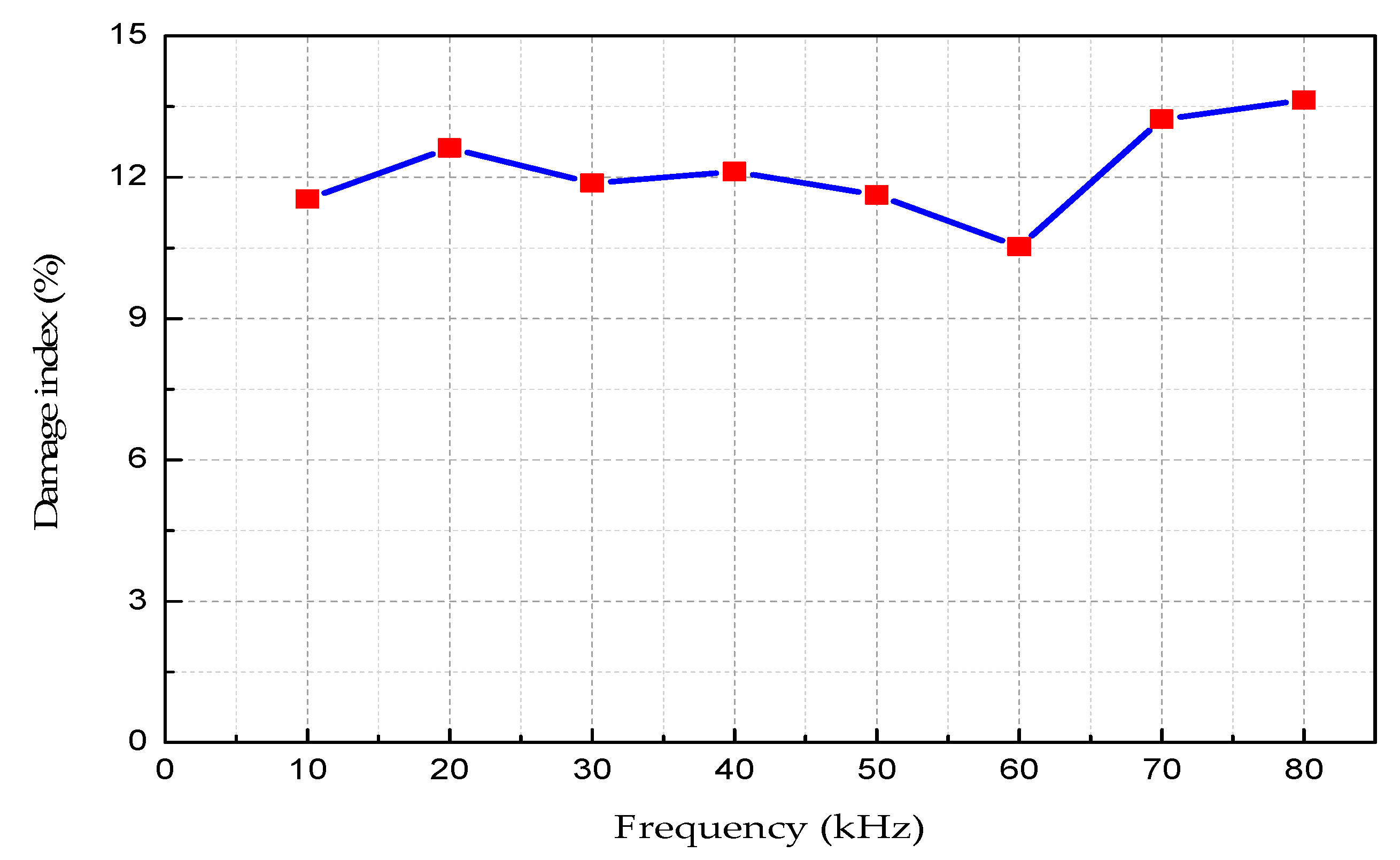
As shown in
Table 8 is the damage index value at each frequency, and
Figure 13 is the relationship curve between the damage index and excitation frequencies.
- (1)
Under the same damage conditions, the damage index does not change significantly with different excitation frequencies.
- (2)
The damage index value is in the range of 0 and 1. For the healthy state, D = 0; for the damaged state, 0 < D < 1. When the damage index D tends to zero, the CFST structure is prone to be healthy; when the damage index D tends to increase, the CFST might be damaged and the greater value of D means the more serious damages.






















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}