Indoor Positioning Based on Pedestrian Dead Reckoning and Magnetic Field Matching for Smartphones



Abstract
:1. Introduction
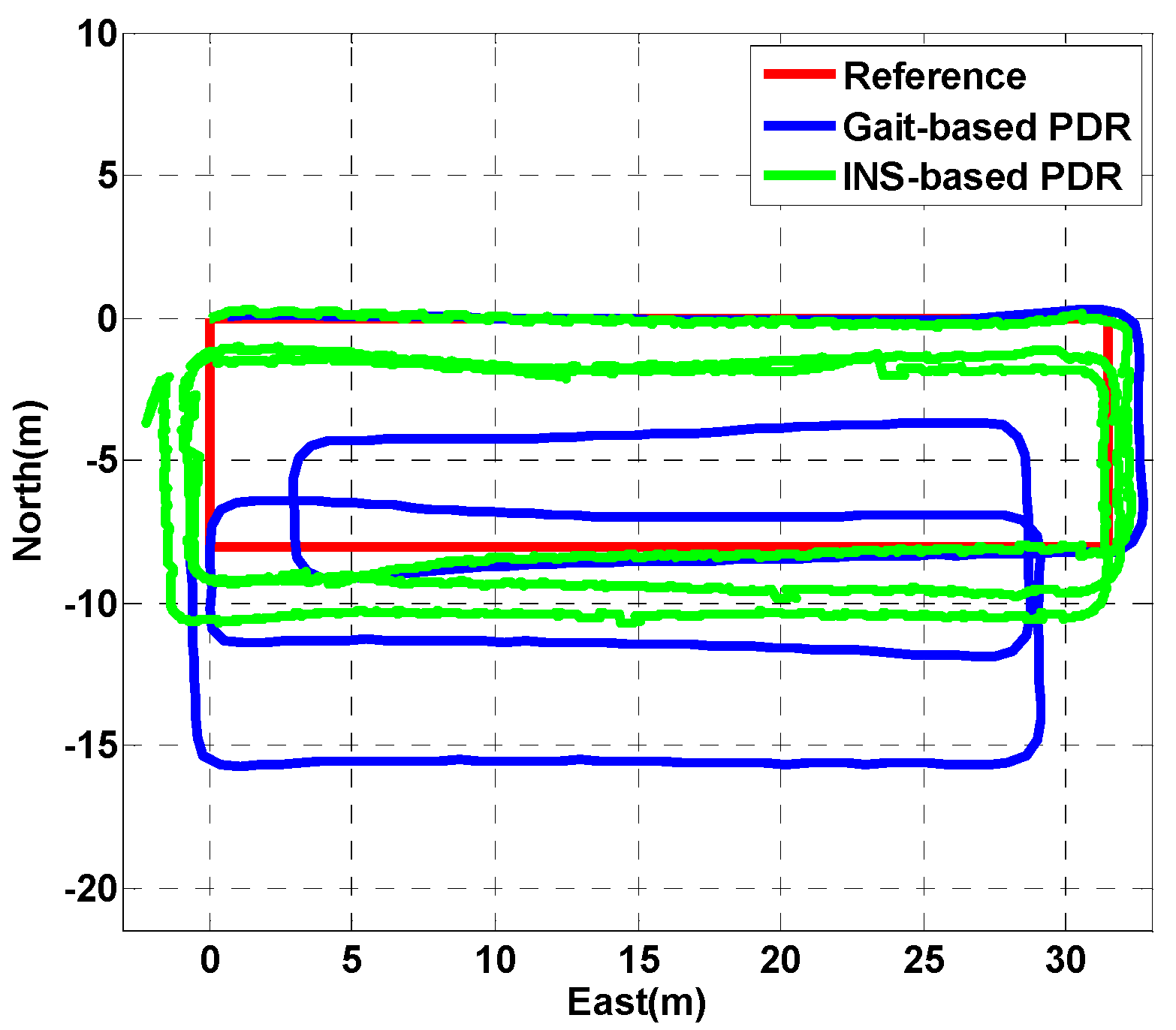
- We employ a strap-down INS-based PDR to provide the relative trajectory contour for a MFS, which can improve the low distinguishability of the magnetic field fingerprint at a single point.
- We devise a novel online magnetic-field-fingerprint-based matching positioning method (e.g., Gauss-Newton iterative method). The proposed algorithm is suitable for smartphone because of its high positioning accuracy and low computational load.
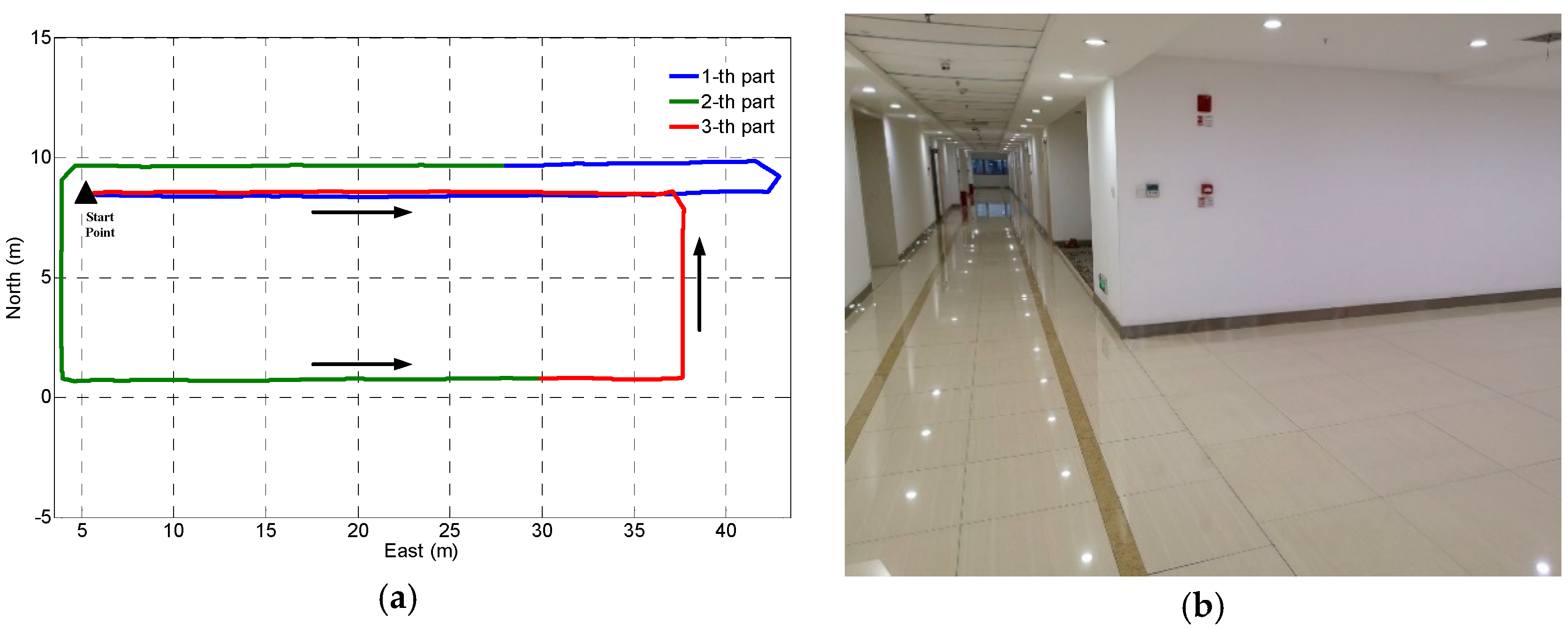
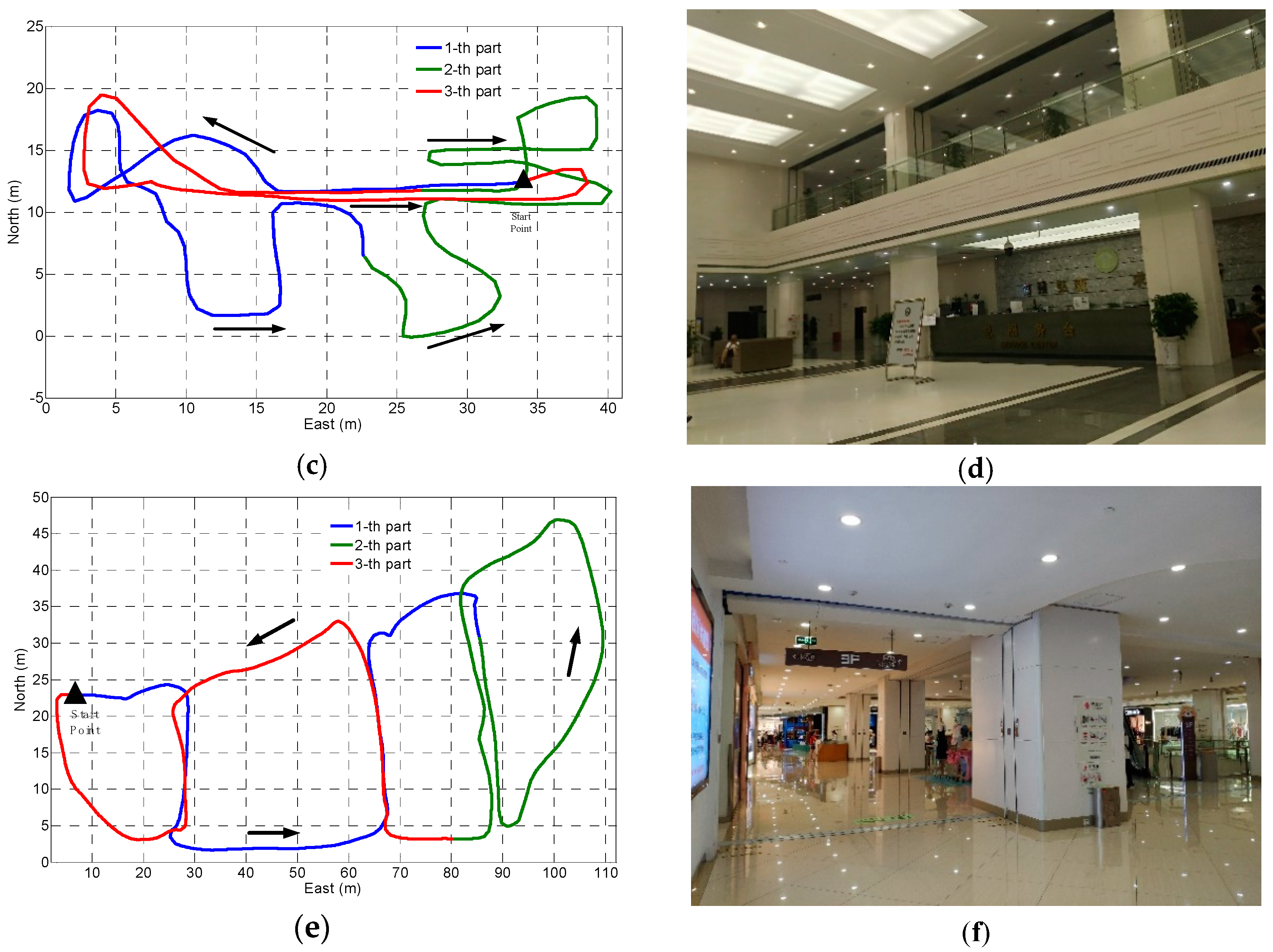
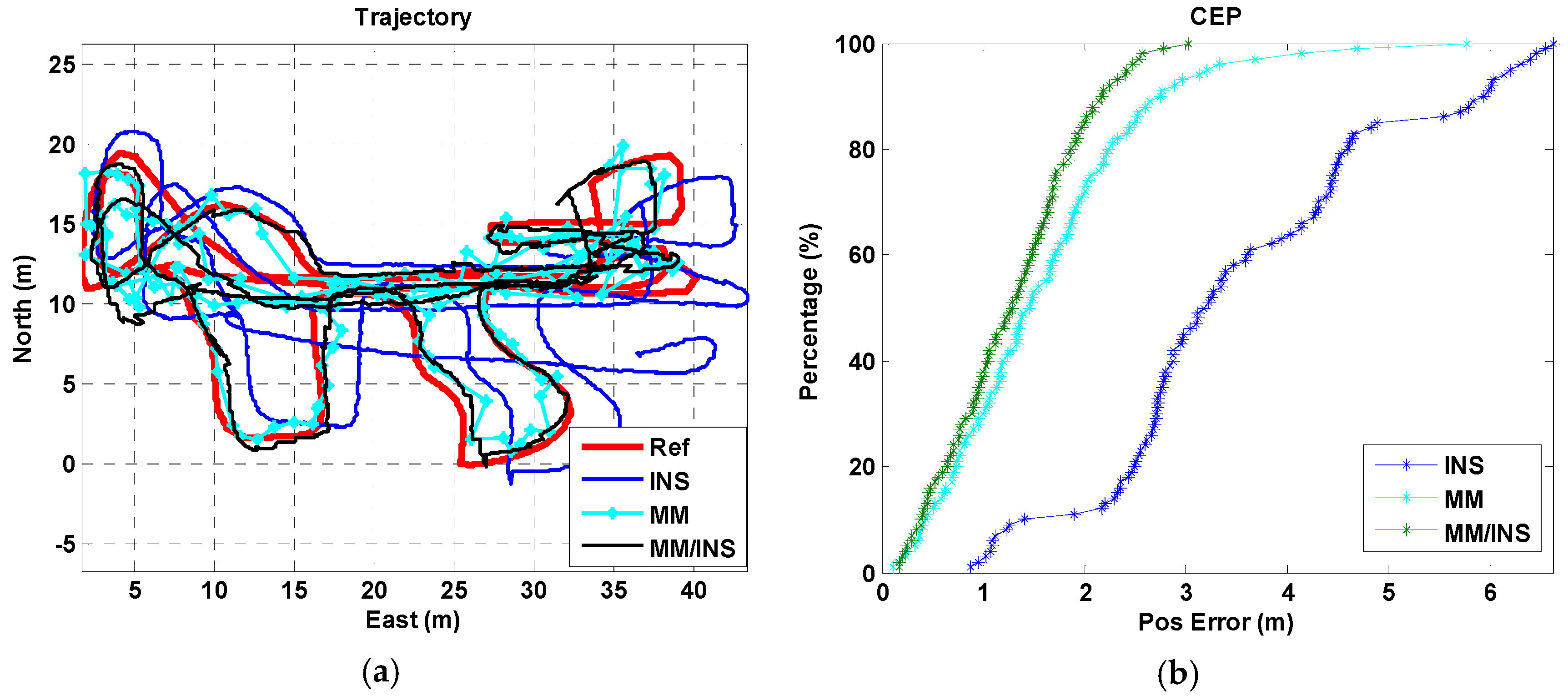
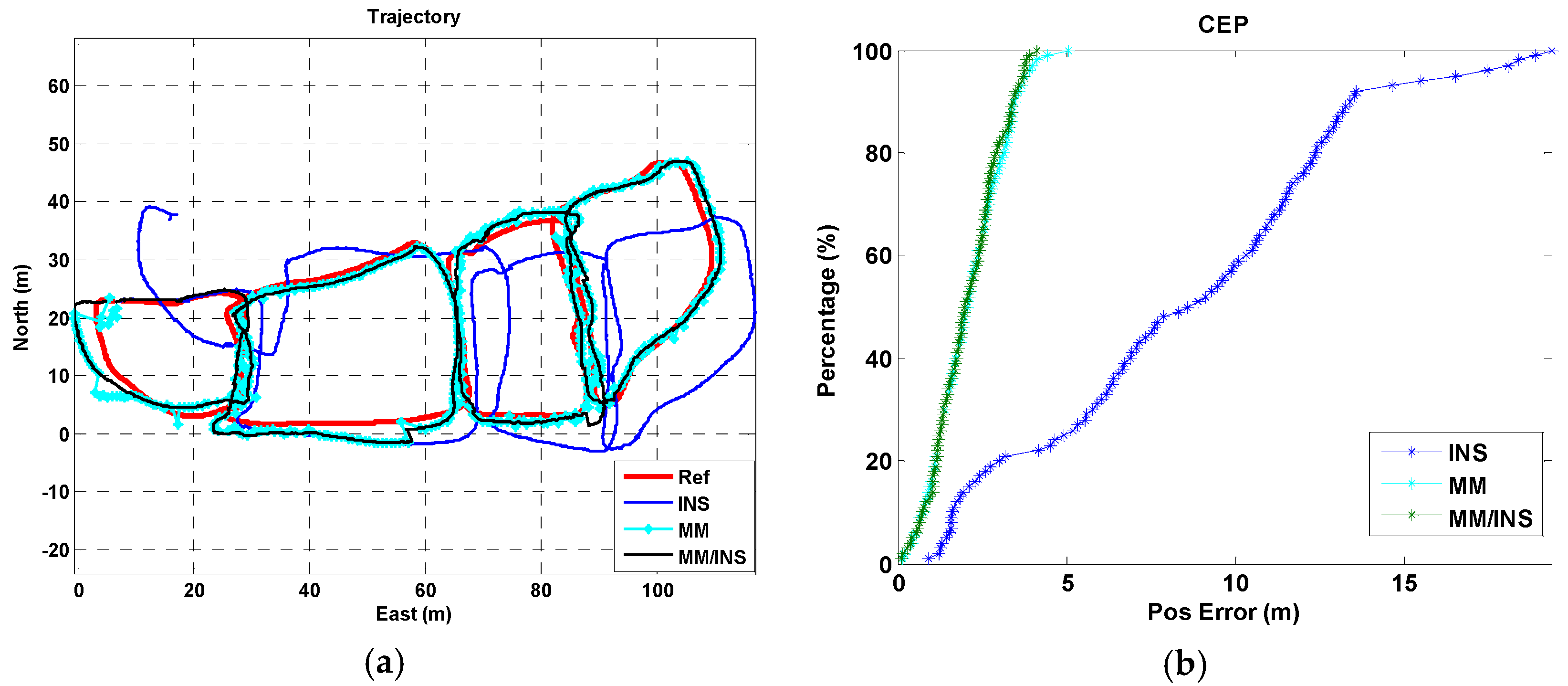
- We implement the proposed method on Android smartphones and evaluate it in three buildings with 2 participants. The position errors are 0.64 m (RMS) in an office building environment, 1.87 m (RMS) in a typical lobby environment, and 2.34 m (RMS) in a shopping mall environment.
2. Materials and Methods
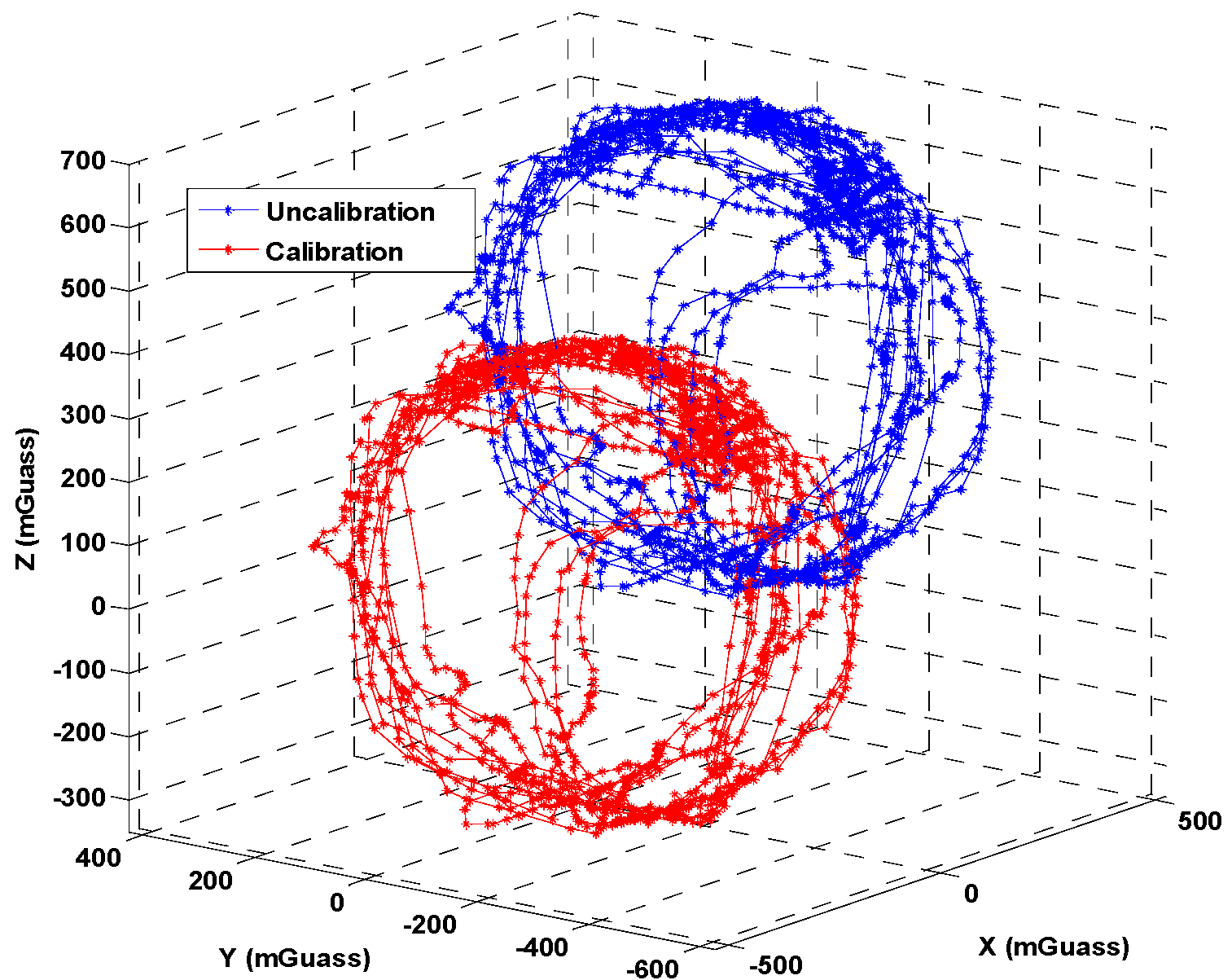
2.1. Sensors Calibration
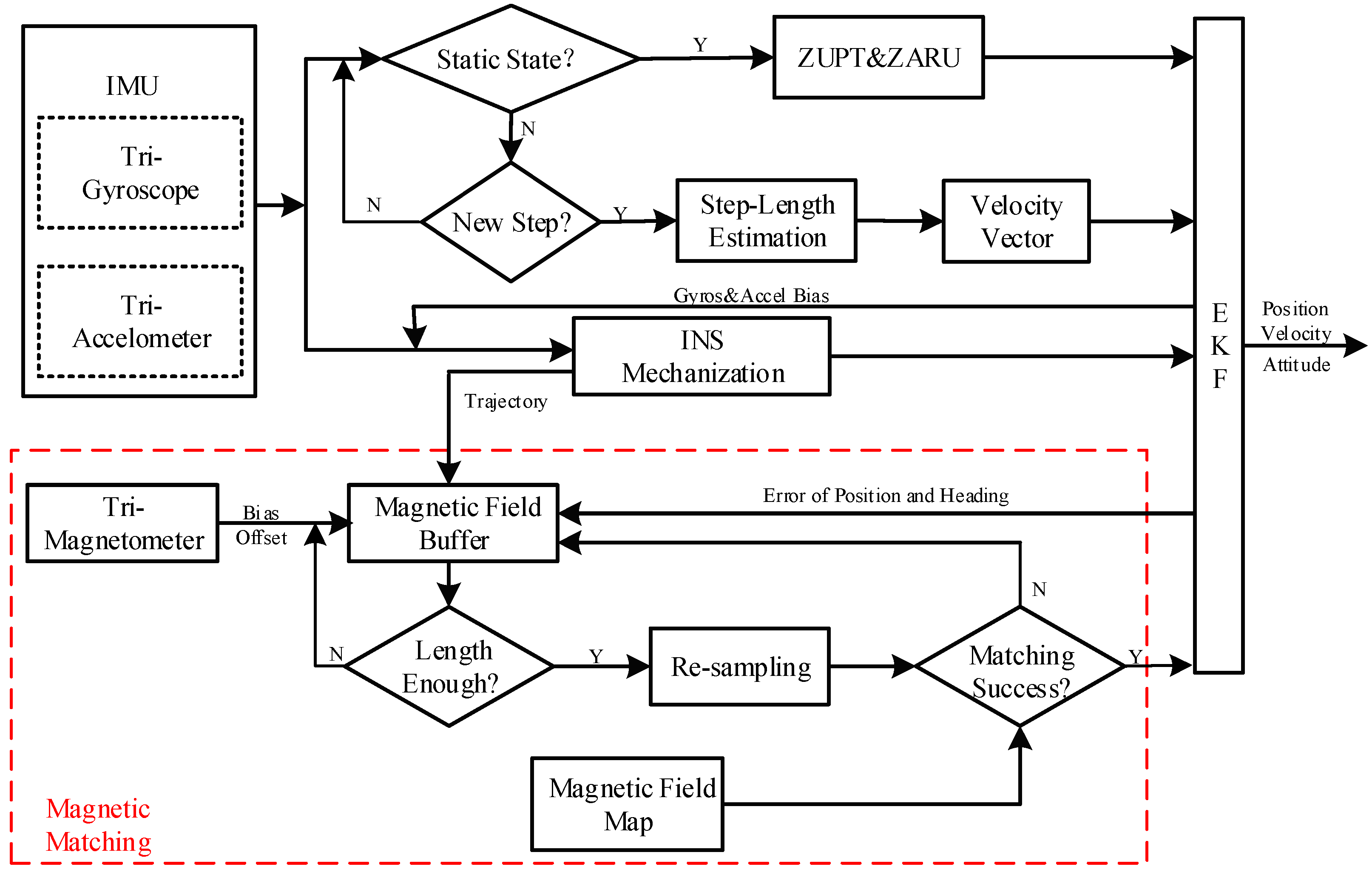
2.2. INS-Based Navigation
2.2.1. INS Mechanization
2.2.2. Extended Kalman Filter Design
2.2.3. Measurement Information Update
2.3. Magnetic Field Matching Positioning
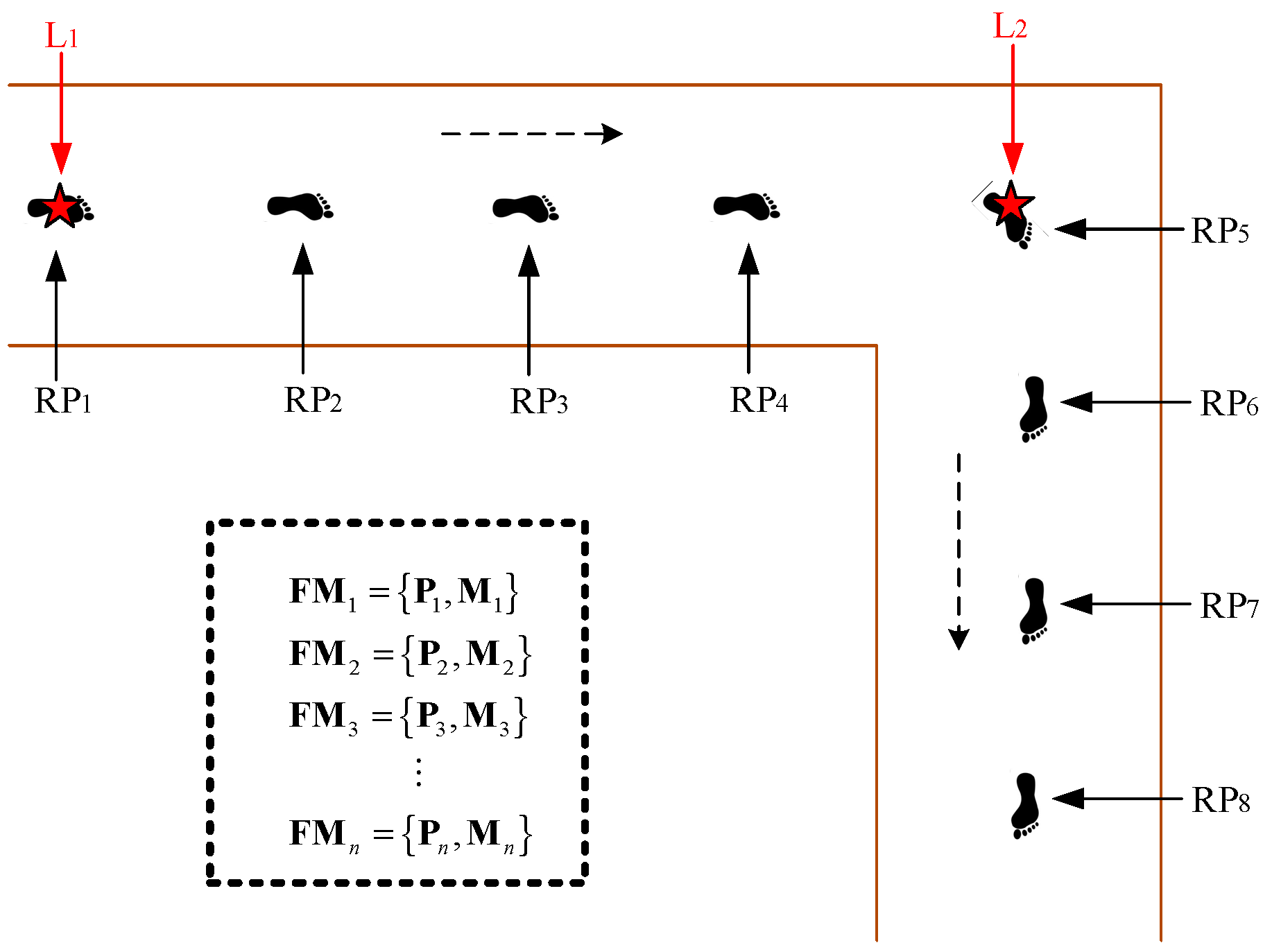
2.3.1. Offline Training Phase
2.3.2. Online Positioning Phase
2.4. INS/MM Integrated Navigation Solution
3. Results
3.1. Step Detection Failure for INS-Based PDR
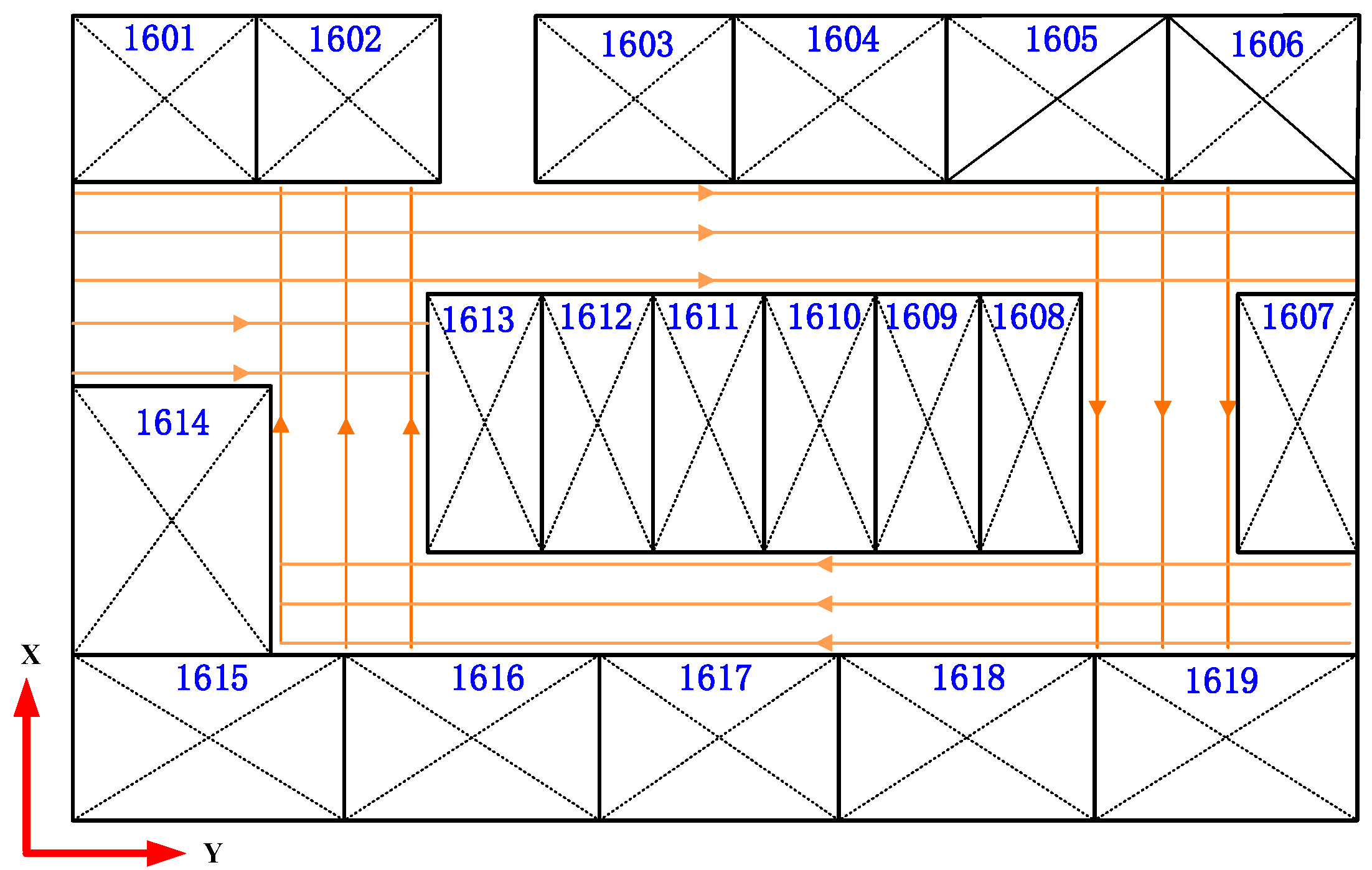
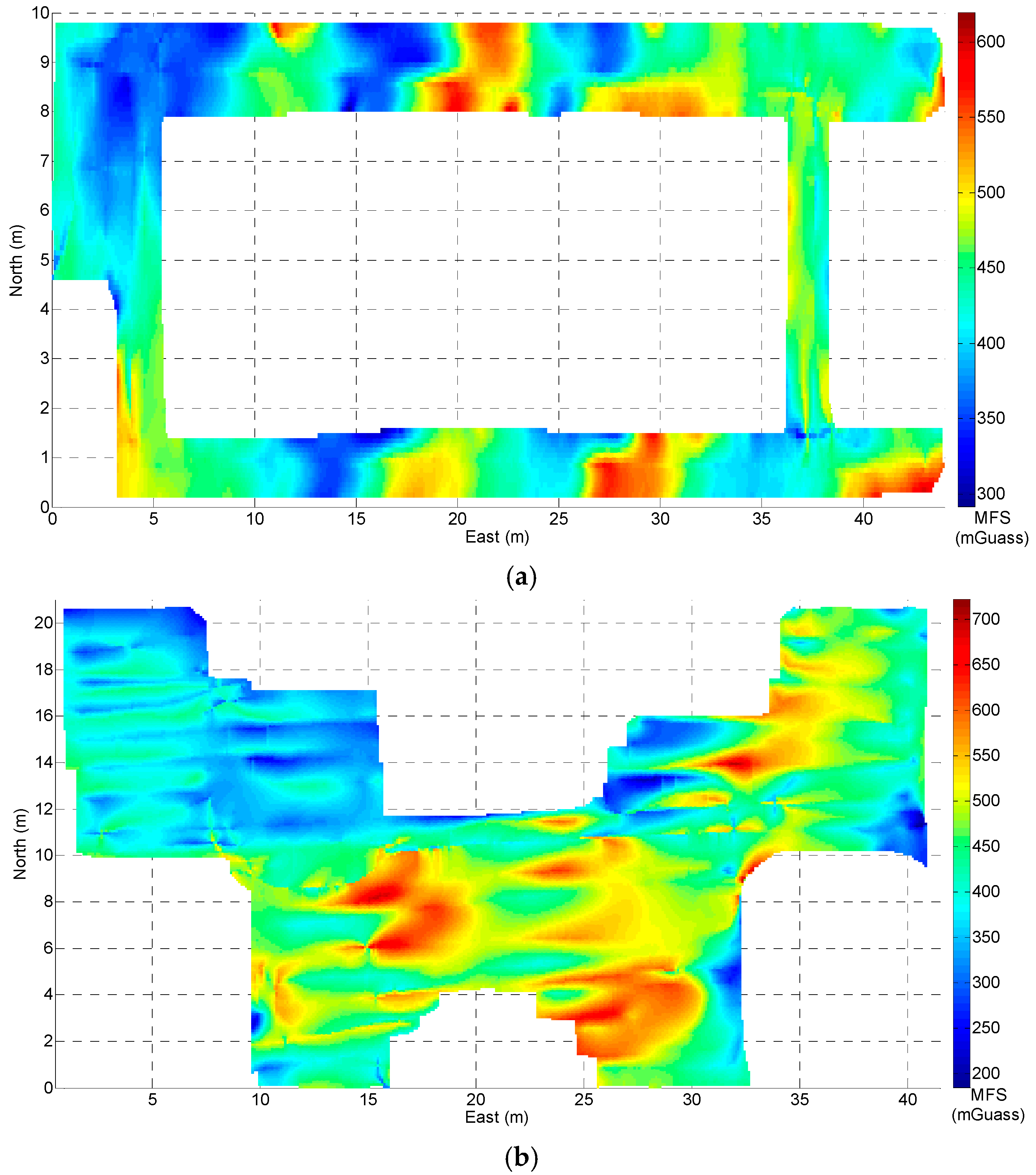
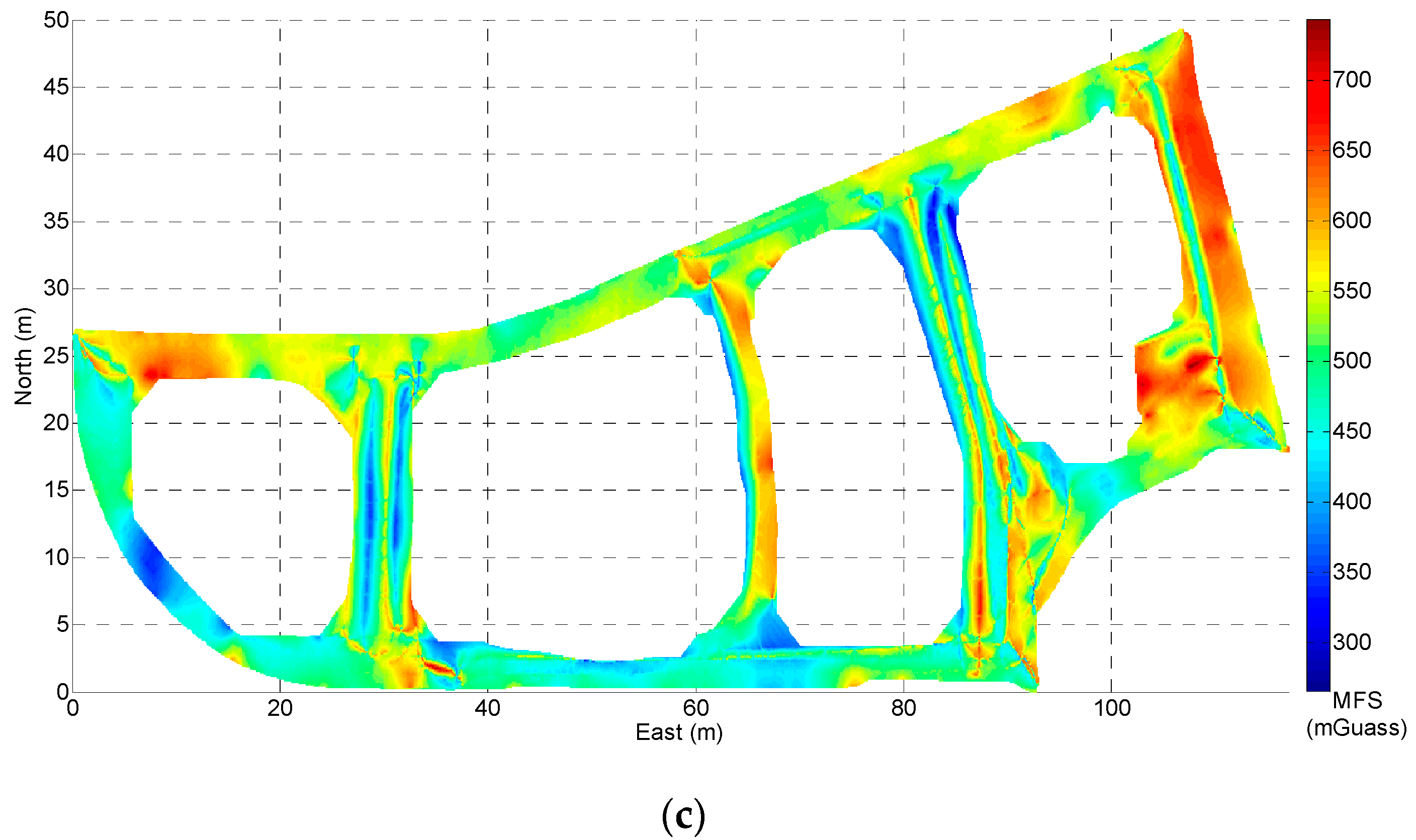
3.2. Magnetic Field Map
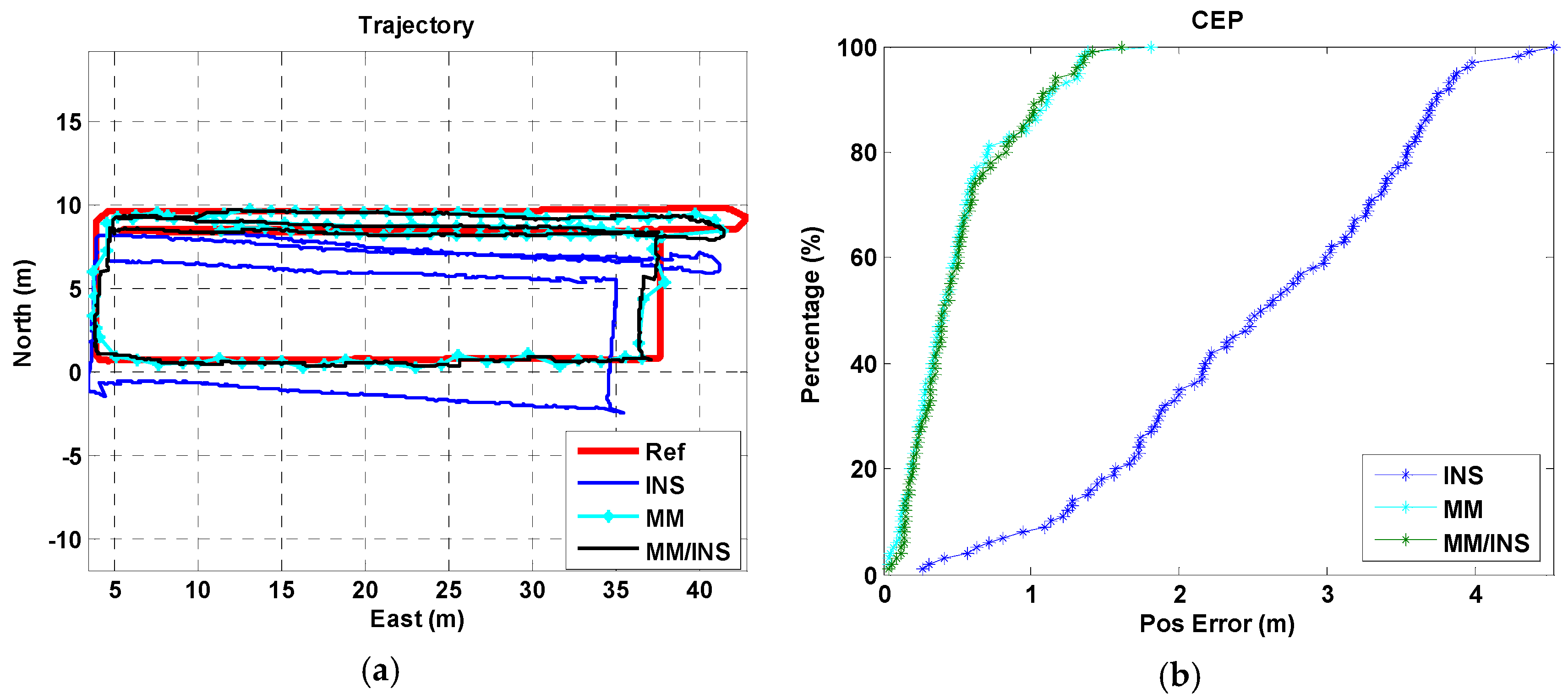
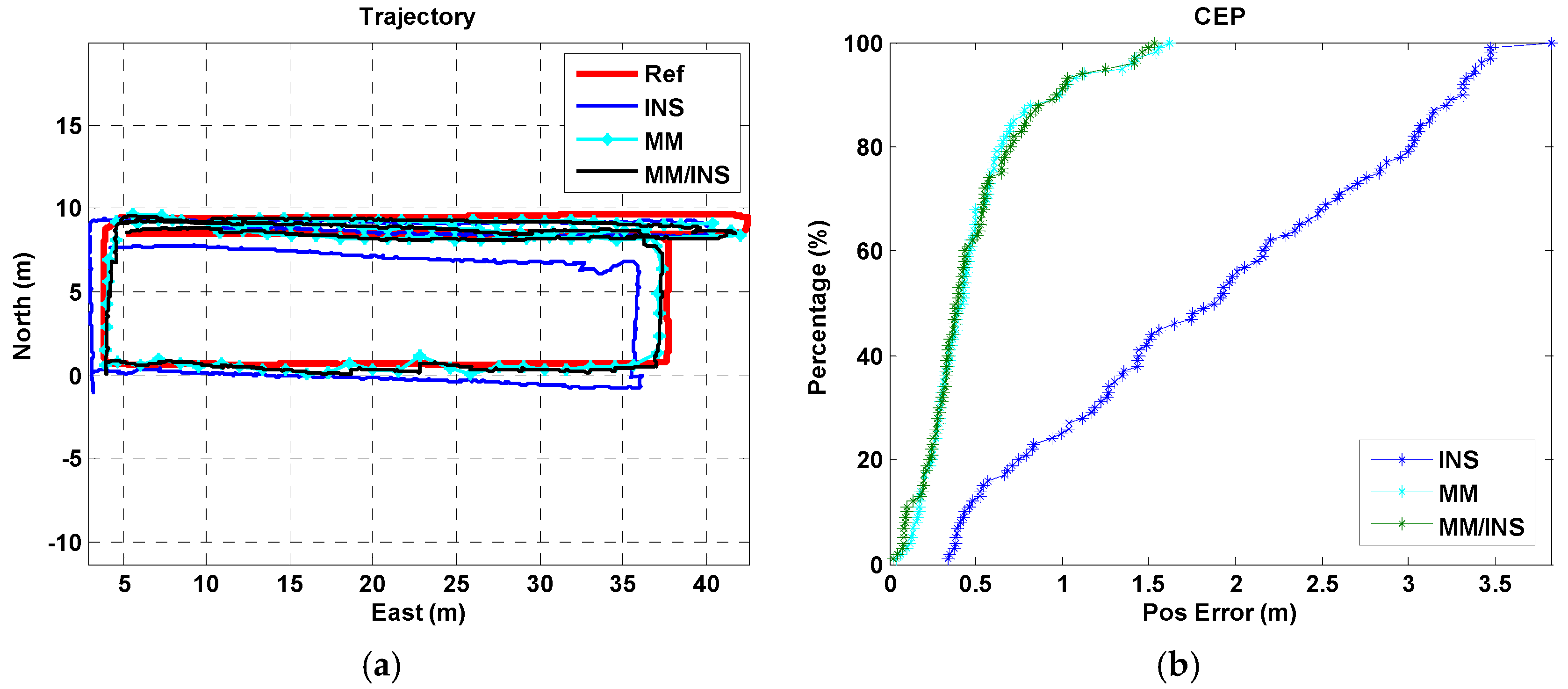
3.3. Position Estimation Performance Analysis
4. Discussion
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Kuusniemi, H.; Bhuiyan, M.Z.H.; Ström, M.; Söderholm, S.; Jokitalo, T.; Chen, L.; Chen, R. Utilizing pulsed pseudolites and high-sensitivity GNSS for ubiquitous outdoor/indoor satellite navigation. In Proceedings of the International Conference on Indoor Positioning and Indoor Navigation, Sydney, NSW, Australia, 13–15 November 2012; pp. 1–7. [Google Scholar]
- Noh, S.I.; Lee, W.J.; Ye, J.Y. Comparison of the Mechanisms of the Zigbee’s Indoor Localization Algorithm. In Proceedings of the ACIS International Conference on Software Engineering, Artificial Intelligence, Networking, and Parallel/distributed Computing, Phuket, Thailand, 6–8 August 2008; pp. 13–18. [Google Scholar]
- Yan, J. Algorithms for Indoor Positioning Systems Using Ultra-Wideband Signals. Ph.D. Dissertation, Delft University of Technology, Delft, The Netherlands, 2010. [Google Scholar]
- Bekkali, A.; Sanson, H.; Matsumoto, M. RFID Indoor Positioning Based on Probabilistic RFID Map and Kalman Filtering. In Proceedings of the Third IEEE International Conference on Wireless and Mobile Computing, Networking and Communications (WiMob 2007), White Plains, NY, USA, 8–10 October 2007; p. 21. [Google Scholar]
- Yucel, H.; Edizkan, R.; Ozkir, T.; Yazici, A. Development of indoor positioning system with ultrasonic and infrared signals. In Proceedings of the International Symposium on Innovations in Intelligent Systems and Applications, Trabzon, Turkey, 2–4 July 2012; pp. 1–4. [Google Scholar]
- Yang, J.; Wang, Z.; Zhang, X. An iBeacon-based indoor positioning systems for hospitals. Int. J. Smart Home 2015, 9, 161–168. [Google Scholar] [CrossRef]
- Ganti, R.K.; Ye, F.; Lei, H. Mobile crowdsensing: Current state and future challenges. IEEE Commun. Mag. 2011, 49, 32–39. [Google Scholar] [CrossRef]
- Li, Y.; Zhuang, Y.; Lan, H.; Zhang, P.; Niu, X.; El-Sheimy, N. WiFi-Aided Magnetic Matching for Indoor Navigation with Consumer Portable Devices. Micromachines 2015, 6, 747–764. [Google Scholar] [CrossRef] [Green Version]
- Haverinen, J.; Kemppainen, A. Global Indoor Self-Localization Based on the Ambient magnetic Field; North-Holland Publishing Co.: Amsterdam, The Netherlands, 2009; pp. 1028–1035. [Google Scholar]
- Subbu, K.P.; Gozick, B.; Dantu, R. LocateMe-Magnetic Fields Based Indoor Localization Using Smartphones. ACM Trans. Intell. Syst. Technol. 2013, 4, 1–27. [Google Scholar] [CrossRef]
- Angermann, M.; Frassl, M.; Doniec, M.; Julian, B.J. Characterization of the indoor magnetic field for applications in Localization and Mapping. In Proceedings of the International Conference on Indoor Positioning and Indoor Navigation, Sydney, NSW, Australia, 13–15 November 2012; pp. 1–9. [Google Scholar]
- Gozick, B.; Subbu, K.P.; Dantu, R.; Maeshiro, T. Magnetic Maps for Indoor Navigation. IEEE Trans. Instrum. Meas. 2011, 60, 3883–3891. [Google Scholar] [CrossRef]
- Fan, X.; Wu, J.; Long, C.; Zhu, Y. Accurate and Low-cost Mobile Indoor Localization with 2-D Magnetic Fingerprints. In Proceedings of the First ACM Workshop on Mobile Crowdsensing Systems and Applications, Delft, The Netherlands, 6–8 November 2017; pp. 13–18. [Google Scholar]
- Lee, S.; Chon, Y.; Cha, H. Smartphone-Based Indoor Pedestrian Tracking Using Geo-magnetic Observations. Mob. Inf. Syst. 2013, 9, 123–137. [Google Scholar]
- Chung, J.; Donahoe, M.; Schmandt, C.; Kim, I.J.; Razavai, P.; Wiseman, M. Indoor location sensing using geo-magnetism. In Proceedings of the International Conference on Mobile Systems, Applications, and Services, Bethesda, MD, USA, 28 June–1 July 2011; pp. 141–154. [Google Scholar]
- Grand, E.L.; Thrun, S. 3-Axis magnetic field mapping and fusion for indoor localization. In Proceedings of the Multisensor Fusion and Integration for Intelligent Systems, Hamburg, Germany, 13–15 September 2012; pp. 358–364. [Google Scholar]
- Xie, H.; Gu, T.; Tao, X.; Ye, H.; Lu, J. A Reliability-Augmented Particle Filter for Magnetic Fingerprinting Based Indoor Localization on Smartphone. IEEE Trans. Mobile Comput. 2016, 15, 1877–1892. [Google Scholar] [CrossRef]
- Chan, S.H.G.; Chan, S.H.G.; Chan, S.H.G. Efficient Sequence Matching and Path Construction for Geomagnetic Indoor Localization. In Proceedings of the International Conference on Embedded Wireless Systems and Networks, Uppsala, Sweden, 20–22 February 2017; pp. 156–167. [Google Scholar]
- He, S.; Kang, G.S. Geomagnetism for Smartphone-Based Indoor Localization: Challenges, Advances, and Comparisons. ACM Comput. Surv. 2017, 50, 1–37. [Google Scholar] [CrossRef]
- Subbu, K.P.; Gozick, B.; Dantu, R. Indoor localization through dynamic time warping. In Proceedings of the IEEE International Conference on Systems, Man, and Cybernetics, Anchorage, AK, USA, 9–12 October 2011; pp. 1639–1644. [Google Scholar]
- Riehle, T.H.; Anderson, S.M.; Lichter, P.A.; Condon, J.P.; Sheikh, S.I.; Hedin, D.S. Indoor Waypoint Navigation via Magnetic Anomalies. In Proceedings of the IEEE Engineering in Medicine and Biology Society, Boston, MA, USA, 30 August–3 September 2011; pp. 5315–5318. [Google Scholar]
- Shu, Y.; Kang, G.S.; He, T.; Chen, J. Last-Mile Navigation Using Smartphones. In Proceedings of the International Conference on Mobile Computing and Networking, Paris, France, 7–11 September 2015; pp. 512–524. [Google Scholar]
- Haverinen, J.; Kemppainen, A. A global self-localization technique utilizing local anomalies of the ambient magnetic field. In Proceedings of the IEEE International Conference on Robotics and Automation, Kobe, Japan, 12–17 May 2009; pp. 3142–3147. [Google Scholar]
- Putta, R.; Misra, M.; Kapoor, D. Smartphone based indoor tracking using magnetic and indoor maps. In Proceedings of the IEEE Tenth International Conference on Intelligent Sensors, Sensor Networks and Information Processing, Singapore, 7–9 April 2015; pp. 1–6. [Google Scholar]
- Kim, B.; Kong, S. Indoor Positioning based on Bayesian Filter using Magnetometer Measurement Difference. In Proceedings of the IEEE Vehicular Technology Conference Proceedings, Glasgow, UK, 11–14 May 2015. [Google Scholar]
- Kim, B.; Kong, S.H. A Novel Indoor Positioning Technique Using Magnetic Fingerprint Difference. IEEE Trans. Instrum. Meas. 2016, 65, 2035–2045. [Google Scholar] [CrossRef]
- Xie, H.; Gu, T.; Tao, X.; Ye, H.; Lv, J. MaLoc: A practical magnetic fingerprinting approach to indoor localization using smartphones. In Proceedings of the 2014 ACM International Joint Conference on Pervasive and Ubiquitous Computing, Seattle, WA, USA, 13–17 September 2014; pp. 243–253. [Google Scholar]
- Vandermeulen, D.; Vercauteren, C.; Weyn, M.; Vandermeulen, D. Indoor localization Using a Magnetic Flux Density Map of a Building. In Proceedings of the International Conference on Ambient, Porto, Portugal, 29 September–3 October 2013. [Google Scholar]
- Akai, N.; Ozaki, K. Gaussian processes for magnetic map-based localization in large-scale indoor environments. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Hamburg, Germany, 28 September–2 October 2015; pp. 4459–4464. [Google Scholar]
- Bilke, A.; Sieck, J. Using the Magnetic Field for Indoor Localisation on a Mobile Phone; Springer: Berlin/Heidelberg, Germany, 2013; pp. 195–208. [Google Scholar]
- Wiener, T.F. Terrain Contour Matching (TERCOM): A Cruise Missile Guidance Aid. In Proceedings of the Technical Symposium, San Diego, CA, USA, 23 December 1980; pp. 10–18. [Google Scholar]
- Kamgarparsi, B. Vehicle localization on gravity maps. Proc. SPIE 1999, 3693. [Google Scholar] [CrossRef]
- Kuang, J.; Niu, X.; Chen, X. Robust Pedestrian Dead Reckoning Based on MEMS-IMU for Smartphones. Sensors 2018, 18, 1391. [Google Scholar] [CrossRef] [PubMed]
- Jimenez, A.R.; Seco, F.; Prieto, C.; Guevara, J. A comparison of Pedestrian Dead-Reckoning algorithms using a low-cost MEMS IMU. In Proceedings of the IEEE International Symposium on Intelligent Signal Processing, Budapest, Hungary, 26–28 August 2009; pp. 37–42. [Google Scholar]
- Levi, R.W.; Judd, T. Dead Reckoning Navigational System Using Accelerometer to Measure Foot Impacts. U.S. Patent 5,583,776, 10 December 1996. [Google Scholar]
- Lin, T.; Li, L.; Lachapelle, G. Multiple sensors integration for pedestrian indoor navigation. In Proceedings of the International Conference on Indoor Positioning and Indoor Navigation, Banff, AB, Canada, 13–16 October 2015; pp. 1–9. [Google Scholar]
- Zhuang, Y.; Lan, H.; Li, Y.; El-Sheimy, N. PDR/INS/WiFi Integration Based on Handheld Devices for Indoor Pedestrian Navigation. Micromachines 2015, 6, 793–812. [Google Scholar] [CrossRef] [Green Version]
- Lan, H. Multiple Systems Integration for Pedestrian Indoor Navigation. Ph.D. Dissertation, University of Calgary, Calgary, AB, Canada, 2016. [Google Scholar]
- Wahdan, A.; Georgy, J.; Noureldin, A. Three-Dimensional Magnetometer Calibration with Small Space Coverage for Pedestrians. IEEE Sens. J. 2015, 15, 598–609. [Google Scholar] [CrossRef]
- Bonnet, S.; Bassompierre, C.; Godin, C.; Lesecq, S.; Barraud, A. Calibration methods for inertial and magnetic sensors. Sens. Actuators A Phys. 2009, 156, 302–311. [Google Scholar] [CrossRef]
- Zhang, B.; Wu, Y.; Fan, H. On Calibration of Three-axis Magnetometer. IEEE Sens. J. 2015, 15, 6424–6431. [Google Scholar]
- Tabatabaei, S.; Gluhak, A.; Tafazolli, R. A Fast Calibration Method for Triaxial Magnetometers. IEEE Trans. Instrum. Meas. 2013, 62, 2929–2937. [Google Scholar] [CrossRef]
- Brajdic, A.; Harle, R. Walk detection and step counting on unconstrained smartphones. In Proceedings of the ACM International Joint Conference on Pervasive and Ubiquitous Computing, Zurich, Switzerland, 8–12 September 2013; pp. 225–234. [Google Scholar]
- Shin, E.-H. Estimation Techniques for Low-Cost Inertial Navigation; University of Calgary: Calgary, AB, Canada, 2005. [Google Scholar]
- Li, Y. Integration of MEMS Sensors, WiFi, and Magnetic Features for Indoor Pedestrian Navigation with Consumer Portable Devices. Ph.D. Dissertation, University of Calgary, Calgary, AB, Canada, 2016. [Google Scholar]
- Kohlbrecher, S.; Von Stryk, O.; Meyer, J.; Klingauf, U. A flexible and scalable SLAM system with full 3D motion estimation. In Proceedings of the IEEE International Symposium on Safety, Security, and Rescue Robotics, Kyoto, Japan, 1–5 November 2011; pp. 155–160. [Google Scholar]
- Zhang, C.; Subbu, K.P.; Luo, J.; Wu, J. GROPING: Geomagnetism and cROwdsensing Powered Indoor NaviGation. IEEE Trans. Mobile Comput. 2015, 14, 387–400. [Google Scholar] [CrossRef] [Green Version]
- Shu, Y.; Bo, C.; Shen, G.; Zhao, C.; Li, L.; Zhao, F. Magicol: Indoor Localization Using Pervasive Magnetic Field and Opportunistic WiFi Sensing. IEEE J. Sel. Area Commun. 2015, 33, 1443–1457. [Google Scholar] [CrossRef]
- Kim, S.E.; Yong, K.; Yoon, J.; Kim, E.S. Indoor positioning system using geomagnetic anomalies for smartphones. In Proceedings of the International Conference on Indoor Positioning and Indoor Navigation, Sydney, NSW, Australia, 13–15 November 2012; pp. 1–5. [Google Scholar]
- Riehle, T.H.; Anderson, S.M.; Lichter, P.A.; Giudice, N.A.; Sheikh, S.I.; Knuesel, R.J.; Kollmann, D.T.; Hedin, D.S. Indoor Magnetic Navigation for the Blind. In Proceedings of the IEEE Engineering in Medicine and Biology Society Conference Proceedings, San Diego, CA, USA, 28 August–1 September 2012; pp. 1972–1975. [Google Scholar]
- Salvador, S.; Chan, P. Toward accurate dynamic time warping in linear time and space. Intell. Data Anal. 2007, 11, 561–580. [Google Scholar] [CrossRef]
- Bai, Y.B.; Gu, T.; Hu, A. Integrating Wi-Fi and magnetic field for fingerprinting based indoor positioning system. In Proceedings of the International Conference on Indoor Positioning and Indoor Navigation, Alcala de Henares, Spain, 4–7 October 2016; pp. 1–6. [Google Scholar]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Test I | Test II | Test III | Test IV | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Max | Mean | RMS | Max | Mean | RMS | Max | Mean | RMS | Max | Mean | RMS | |
| INS | 4.52 | 2.55 | 2.75 | 3.83 | 1.88 | 2.14 | 6.62 | 3.52 | 3.81 | 19.34 | 8.39 | 9.59 |
| MM | 1.80 | 0.50 | 0.64 | 1.62 | 0.49 | 0.60 | 5.77 | 1.59 | 1.87 | 5.05 | 2.10 | 2.34 |
| MM/INS Integrated | 1.61 | 0.52 | 0.64 | 1.52 | 0.49 | 0.60 | 3.03 | 1.29 | 1.45 | 4.11 | 2.06 | 2.27 |
| Scheme | Techniques | Test Scenarios | Positioning Accuracy | Computational Load |
|---|---|---|---|---|
| [47] | DTW/Bayesian | Shopping mall | <5 m | Medium |
| [8] | DTW, Wi-Fi | Corridor | 4 m | Low |
| [48] | DTW | Corridor, UPL, Supermarket | <4 m | High |
| [10] | DTW | Corridor | 3.5 m | Low |
| The Proposed Scheme | GN | Corridor, Hall, Shopping mall | <2.5 m | Low |
| [22] | DTW | Corridor | <2 m | Medium |
| [17,27] | PF | Hall, Conference Room, Corridor, Book shelf | <2 m | Medium |
| [49] | PF | Corridor | 1 m | High |
| [24] | PF, IM | Book shelf | 0.75 m | Medium |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kuang, J.; Niu, X.; Zhang, P.; Chen, X. Indoor Positioning Based on Pedestrian Dead Reckoning and Magnetic Field Matching for Smartphones. Sensors 2018, 18, 4142. https://doi.org/10.3390/s18124142
Kuang J, Niu X, Zhang P, Chen X. Indoor Positioning Based on Pedestrian Dead Reckoning and Magnetic Field Matching for Smartphones. Sensors. 2018; 18(12):4142. https://doi.org/10.3390/s18124142
Chicago/Turabian StyleKuang, Jian, Xiaoji Niu, Peng Zhang, and Xingeng Chen. 2018. "Indoor Positioning Based on Pedestrian Dead Reckoning and Magnetic Field Matching for Smartphones" Sensors 18, no. 12: 4142. https://doi.org/10.3390/s18124142
APA StyleKuang, J., Niu, X., Zhang, P., & Chen, X. (2018). Indoor Positioning Based on Pedestrian Dead Reckoning and Magnetic Field Matching for Smartphones. Sensors, 18(12), 4142. https://doi.org/10.3390/s18124142