Study on Residual Vibration Suppress of a 3-DOF Flexible Parallel Robot Mechanism

Abstract
:1. Introduction
2. Dynamic Model of 3-DOF Flexible Parallel Robot Mechanism
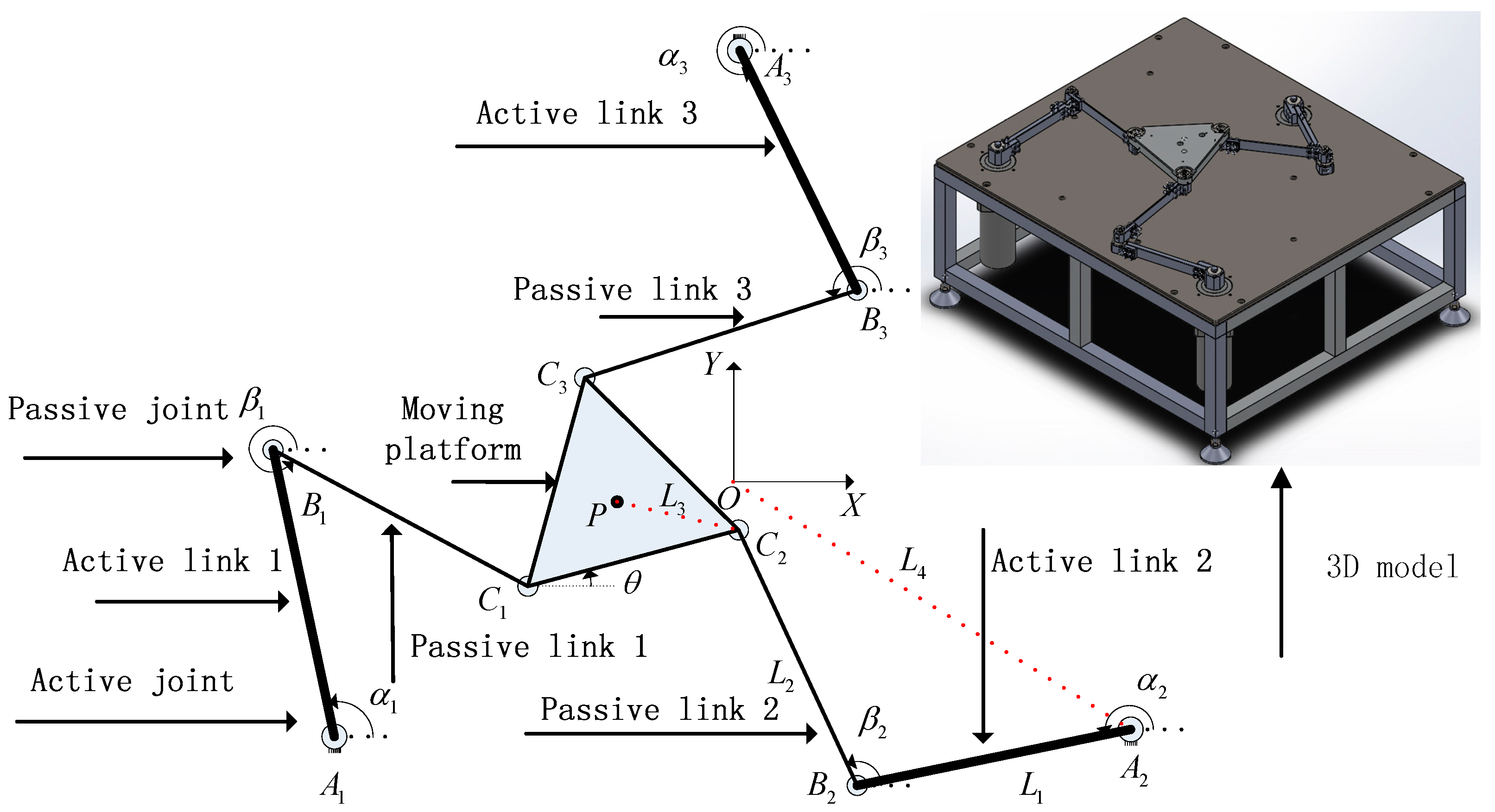
2.1. Sketch of 3-DOF Flexible Parallel Robot Mechanism
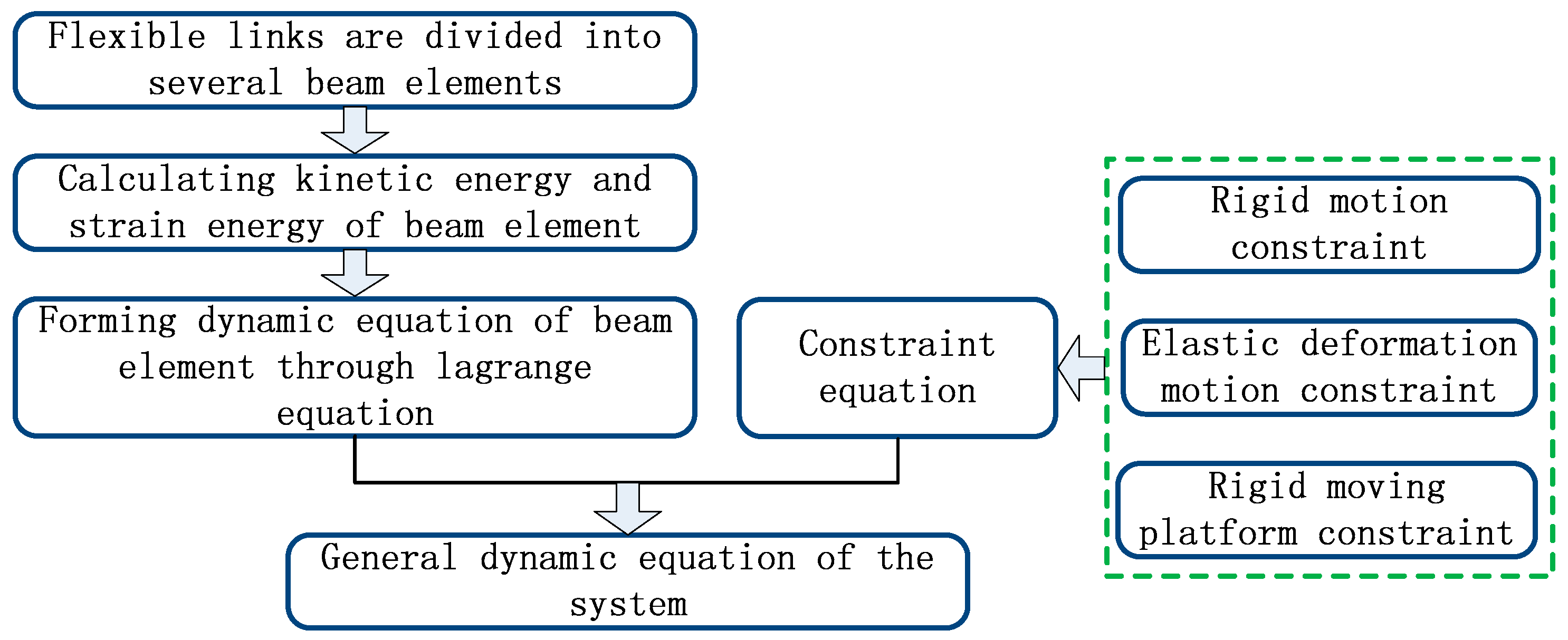
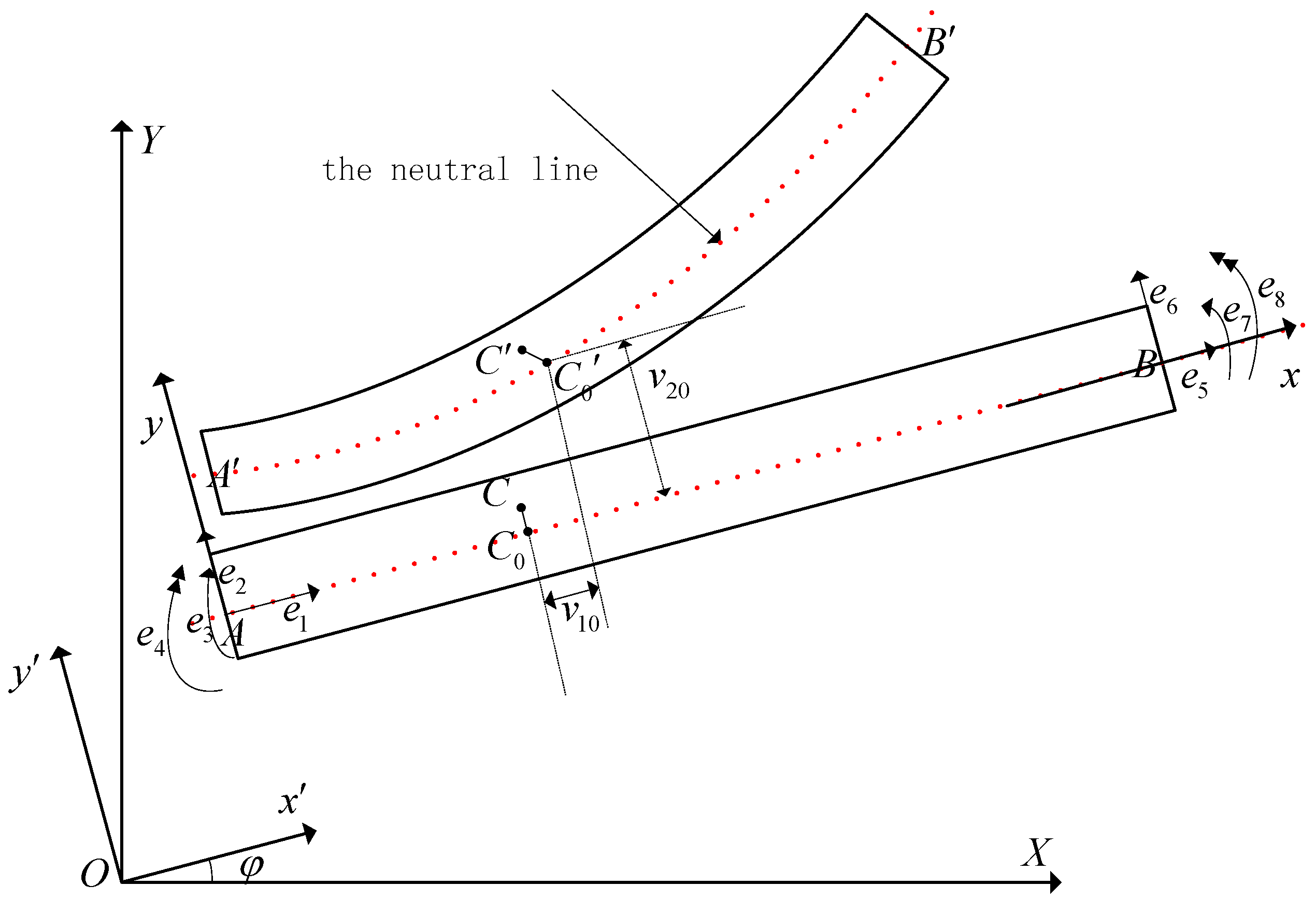
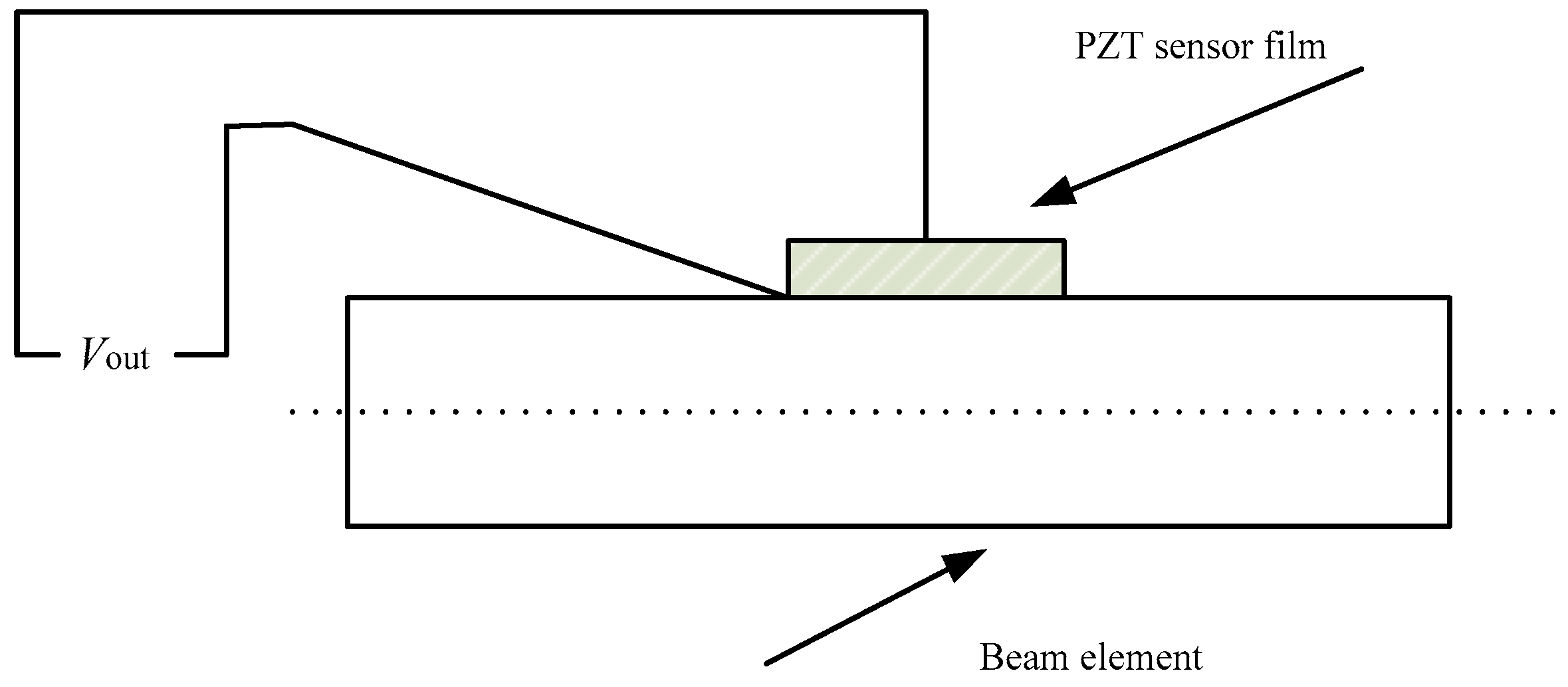
2.2. Dynamic Modeling of the Beam Element
3. Strain and Strain Rate Feedback Control Algorithm
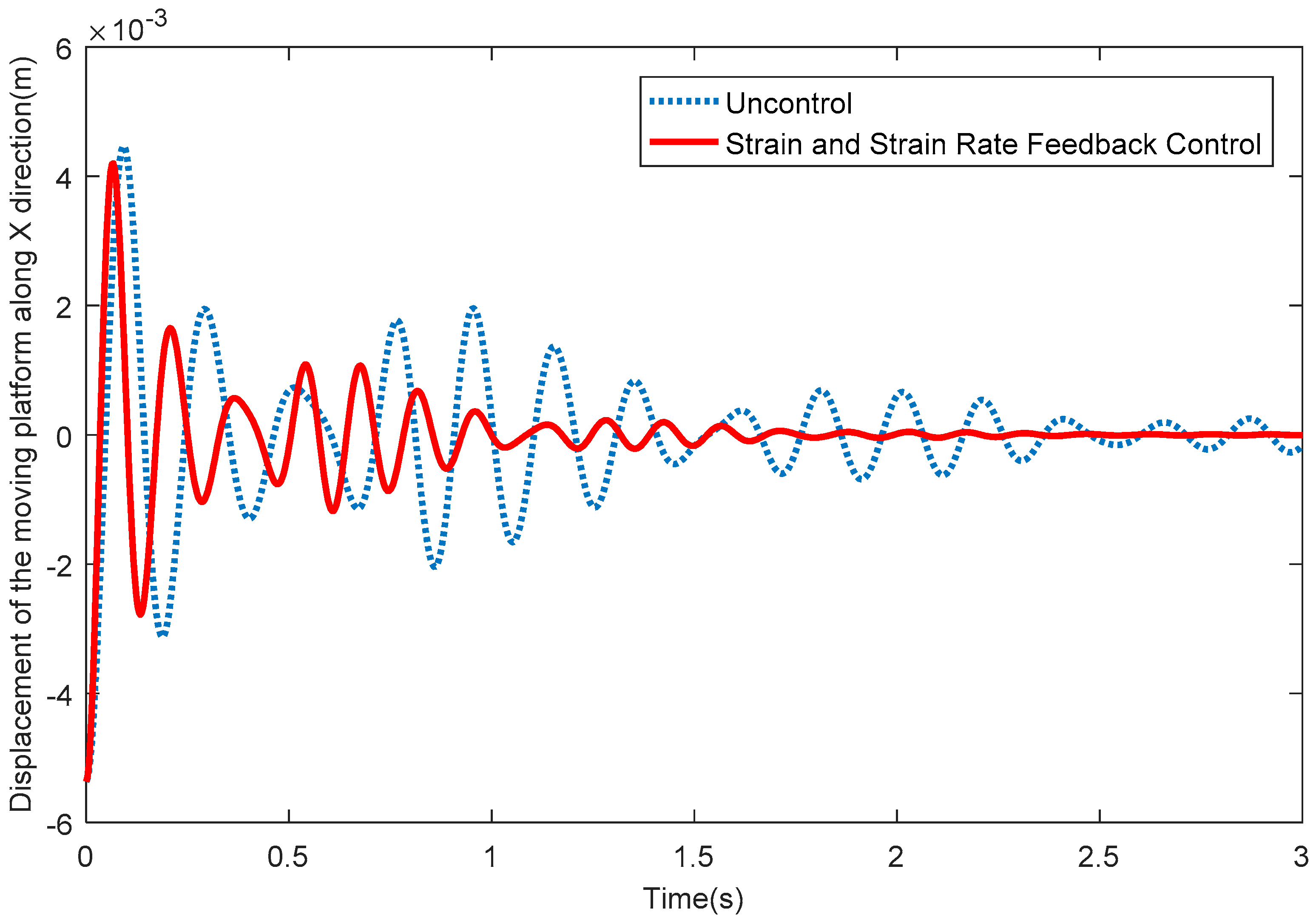
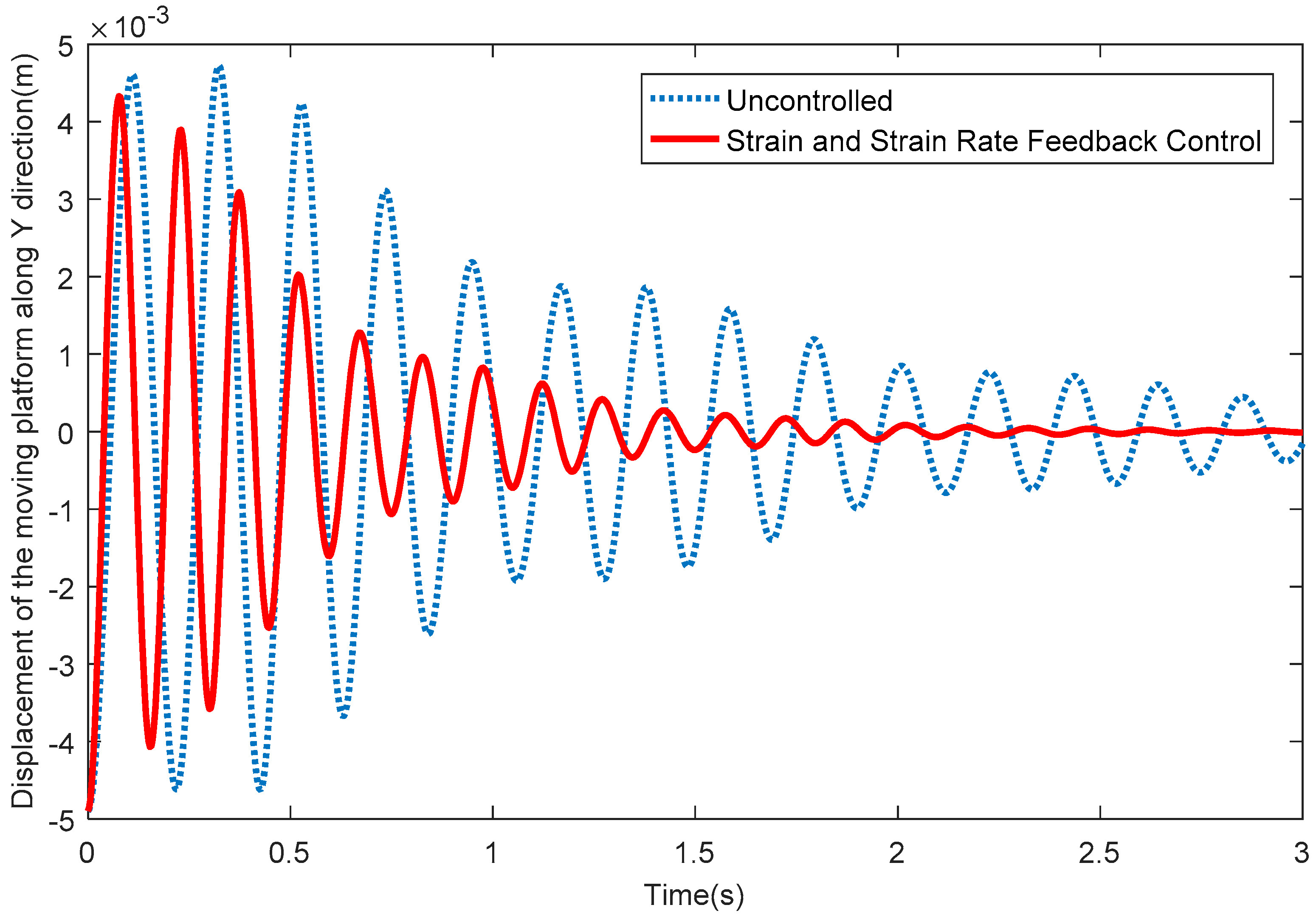
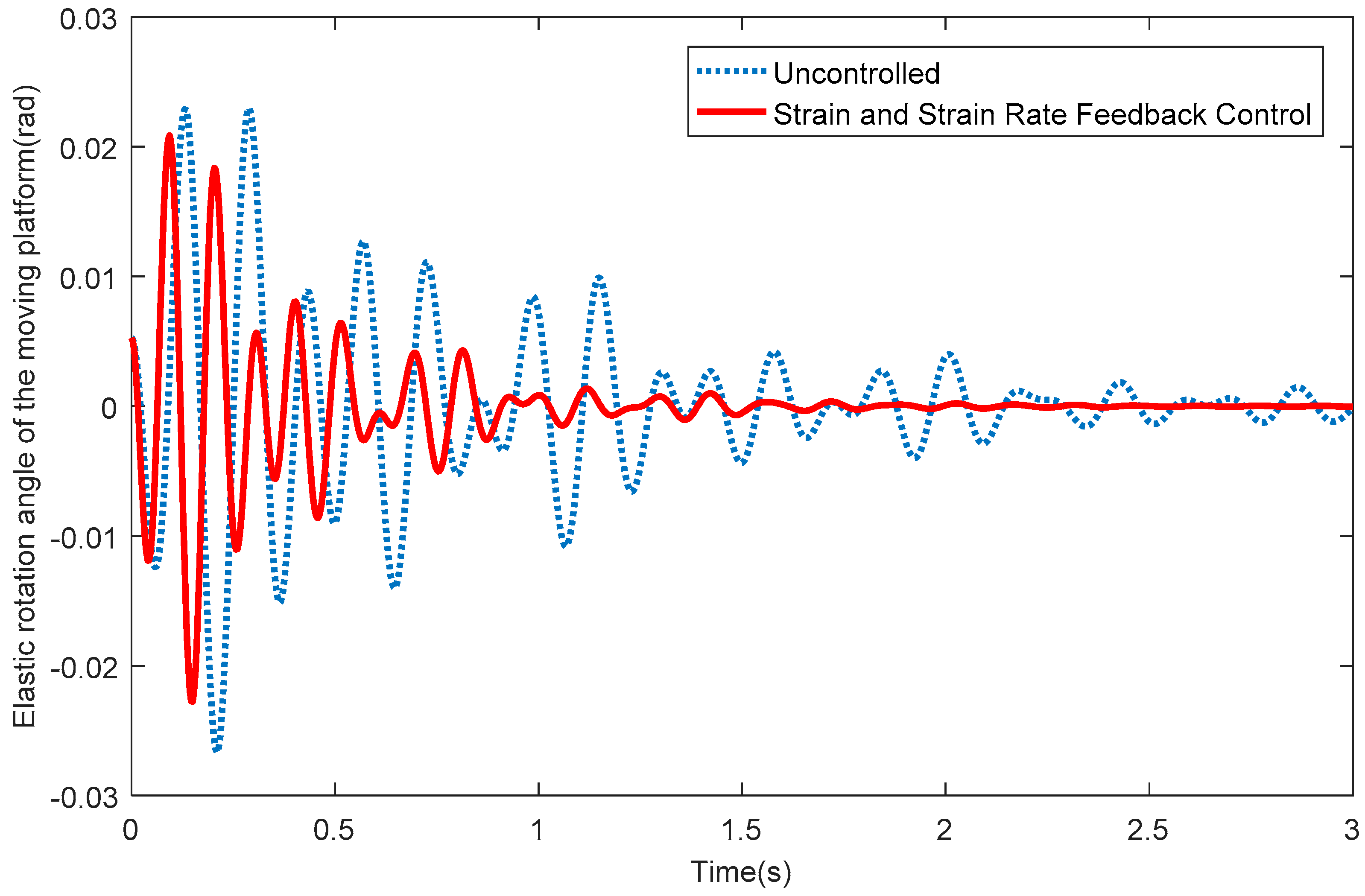
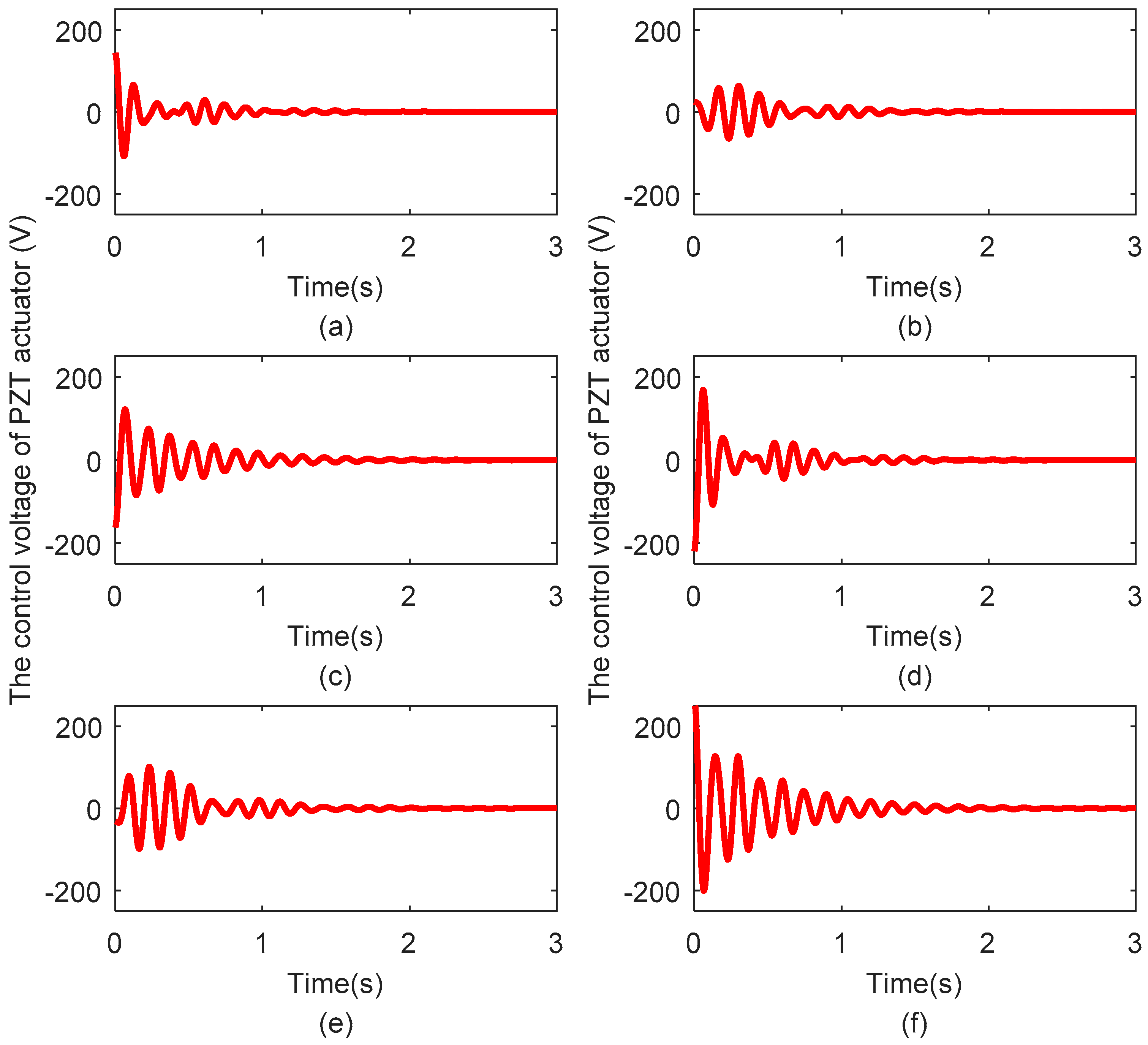
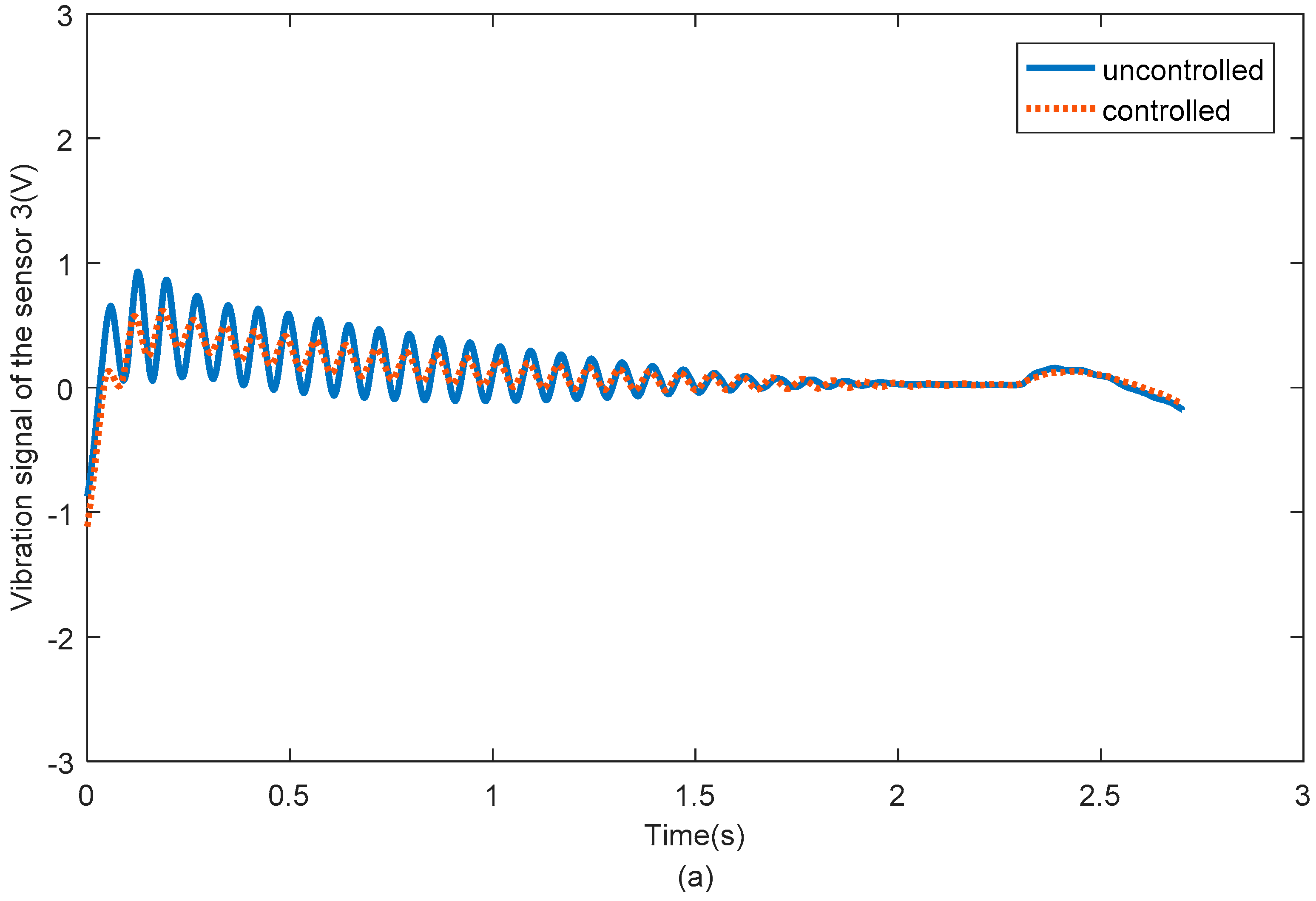
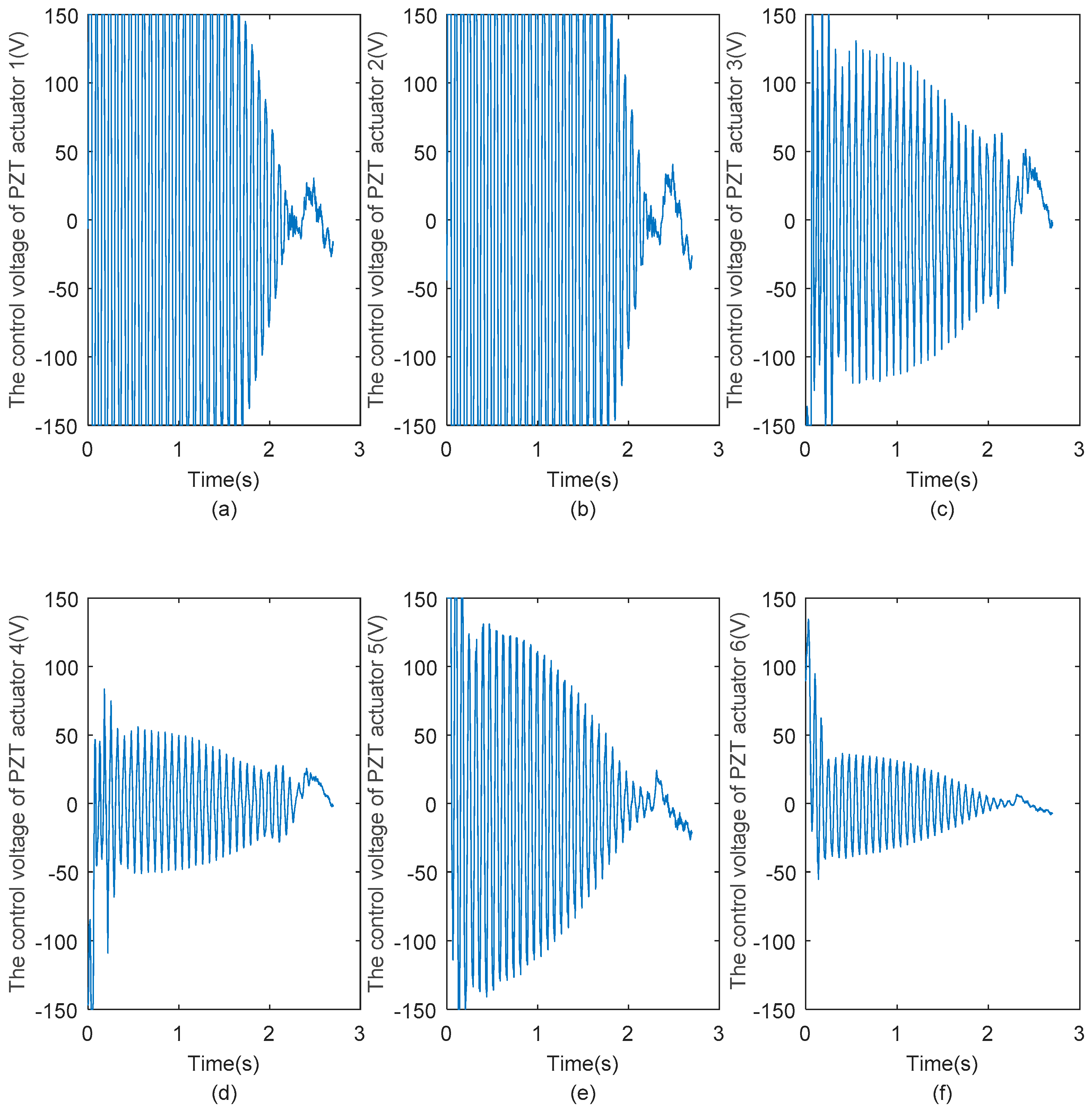
4. Numerical Simulation Analysis
5. Vibration Experiment Study
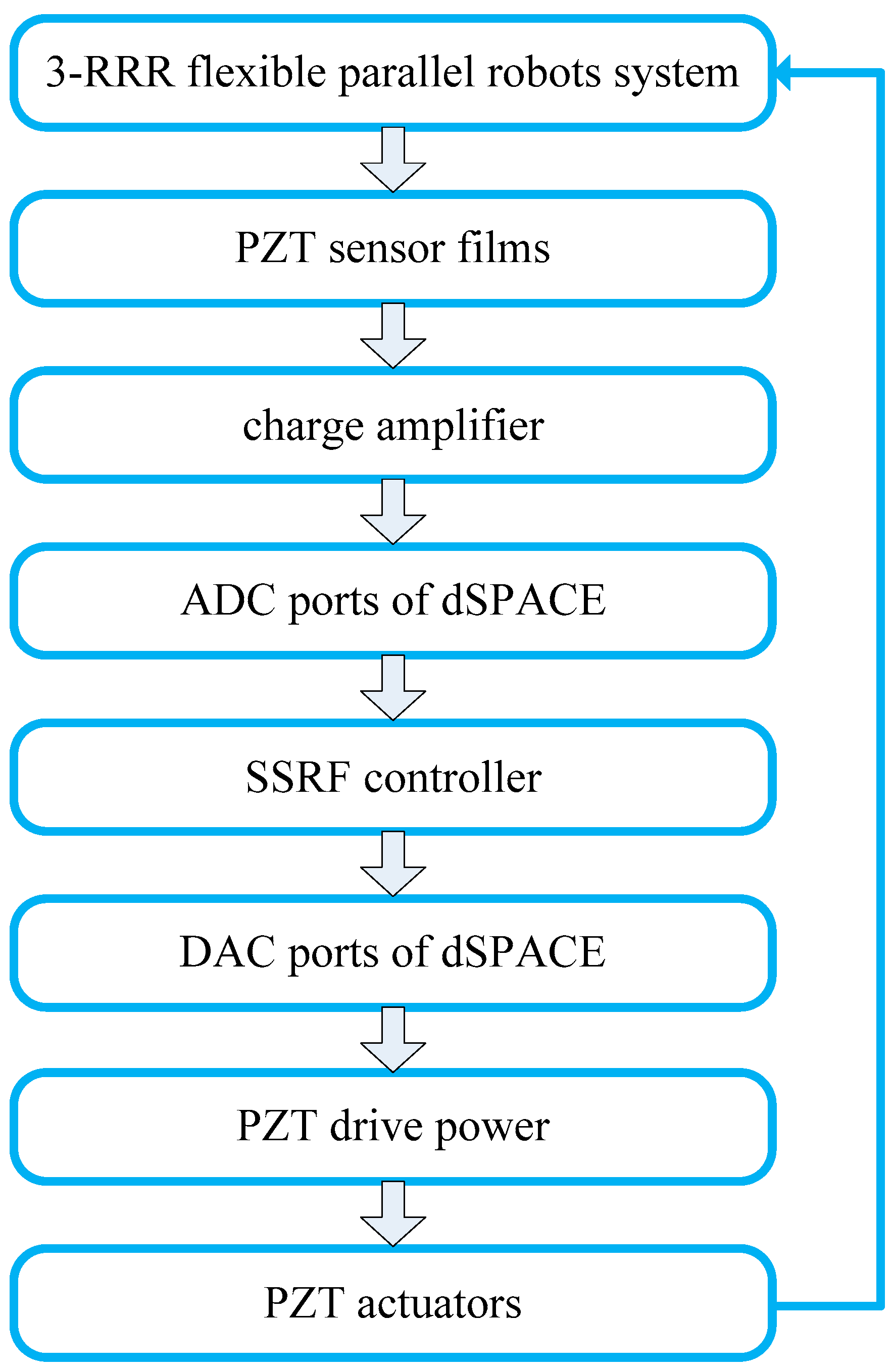
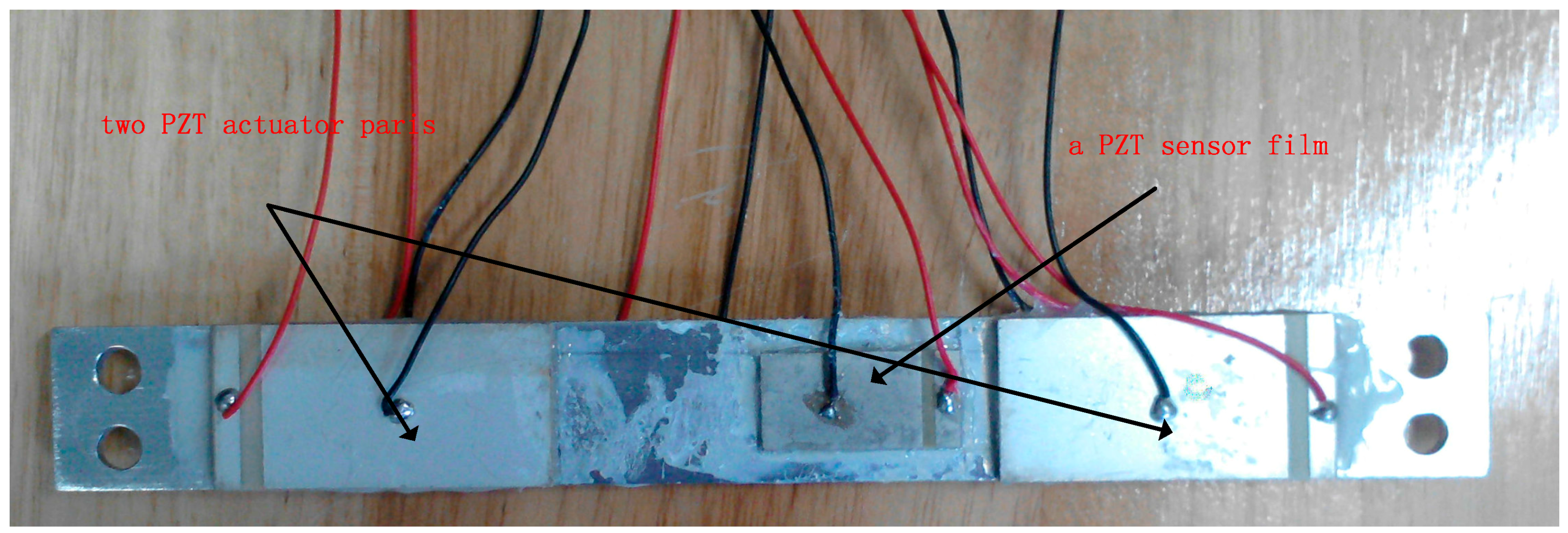
5.1. Experiment Platform Introduction
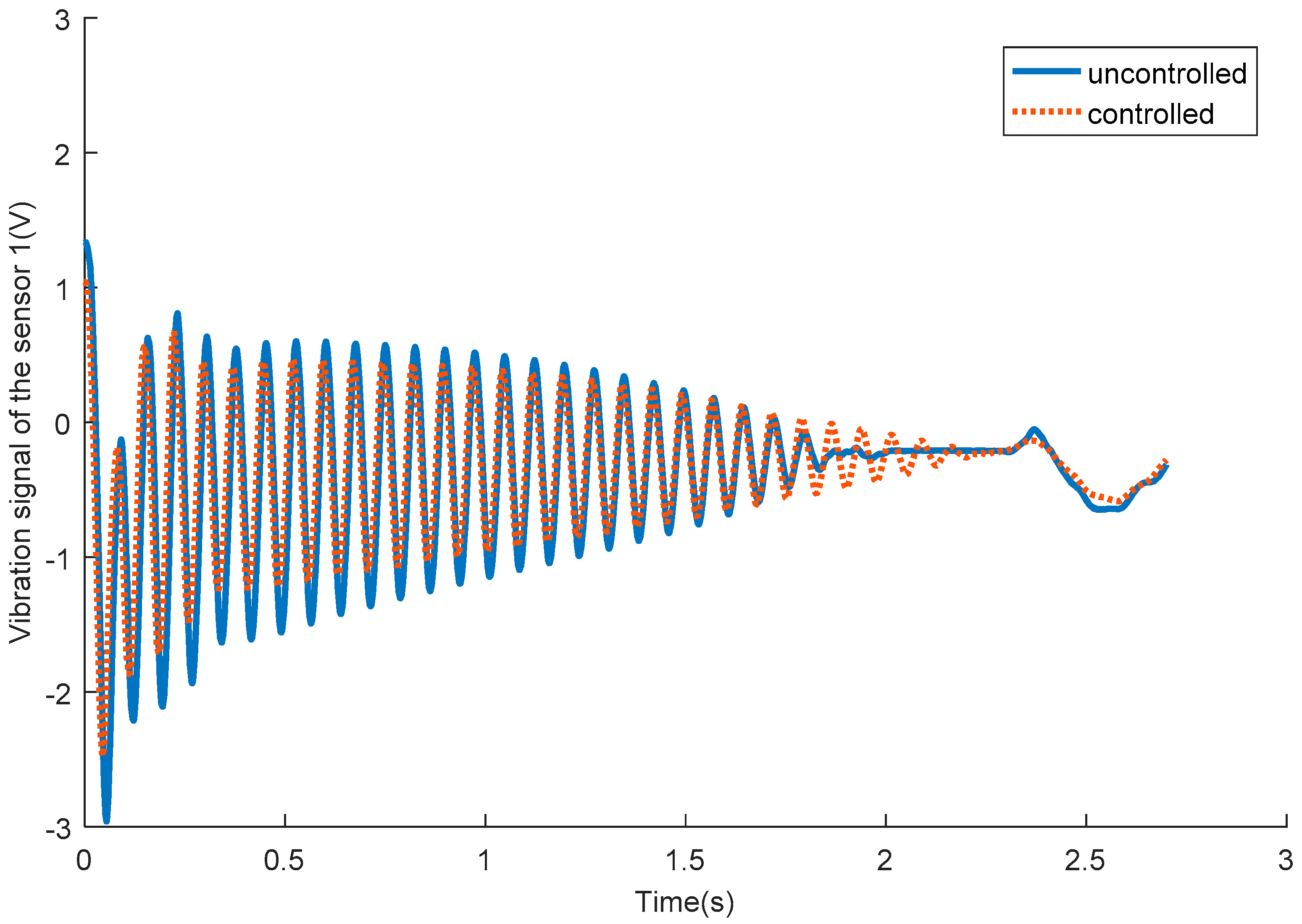
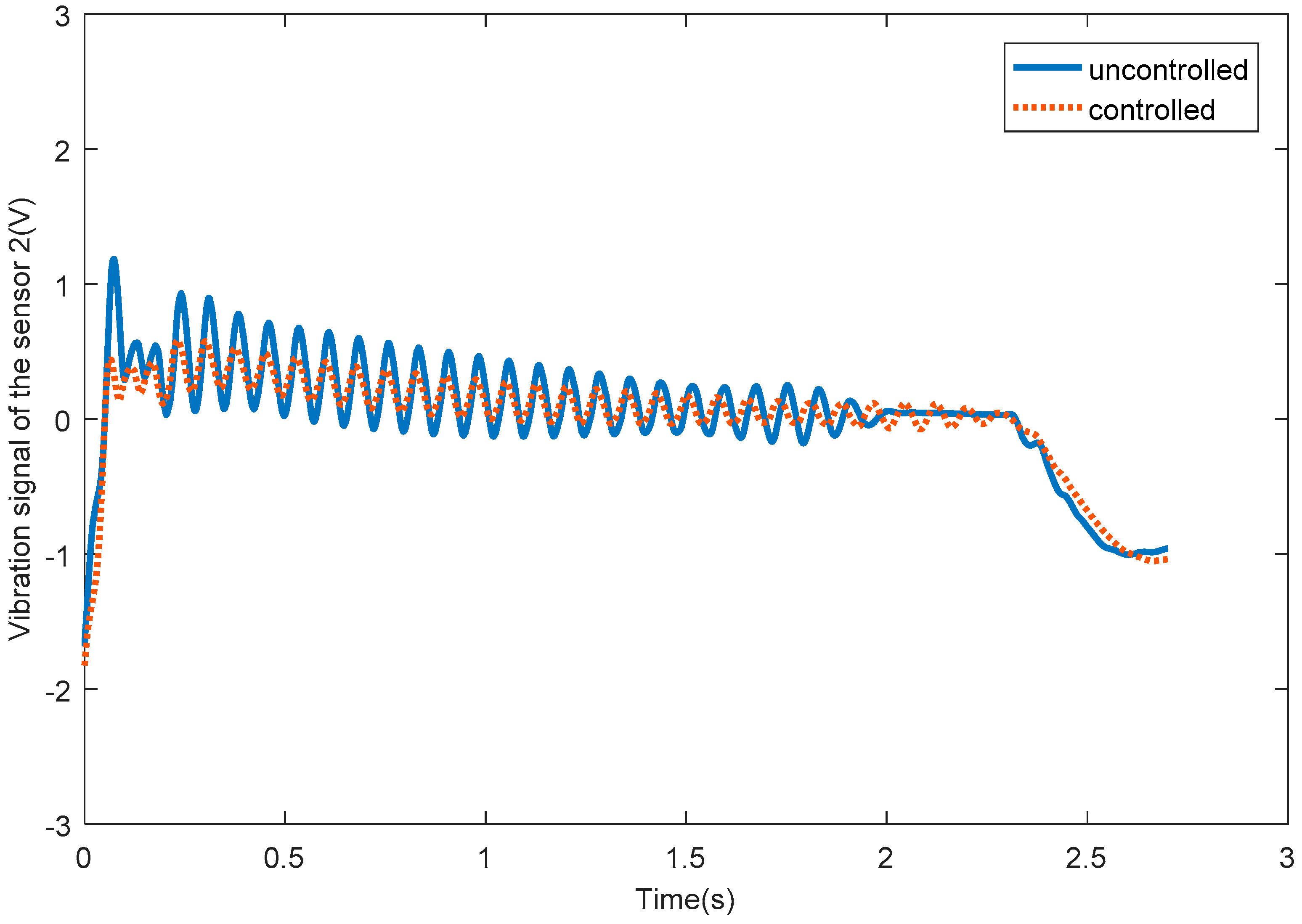
5.2. Experimental Result and Analysis
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Bensoman, M.; Vey, G.L. Control of flexible manipulators: A survey. Robotica 2004, 22, 533–545. [Google Scholar] [CrossRef]
- Dwivedy, S.K.; Eberhard, P. Dynamic analysis of flexible manipulators, a literature review. Mech. Mach. Theory 2006, 41, 749–777. [Google Scholar] [CrossRef]
- Wasfy, T.; Noor, A. Computational strategies for flexible multibody systems. Mech. Mach. Theory 2003, 56, 553–614. [Google Scholar] [CrossRef]
- Rahimi, H.N.; Nazemizadeh, M. Dynamic analysis and intelligent control techniques for flexible manipulators: A review. Adv. Robot. 2014, 28, 63–76. [Google Scholar] [CrossRef]
- Chang, T.K.; Spowage, A.; Chan, K.Y. Review of control and sensor system of flexible manipulator. J. Intell. Robot. Syst. 2015, 77, 187–213. [Google Scholar]
- Mohamed, Z.; Sayahkarajy, M.; Fauzi, A.A.M. Review of modelling and control of flexible-link manipulators. Proc. Inst. Mech. Eng. Part I J. Syst. Control Eng. 2016, 230, 861–873. [Google Scholar]
- Lochan, K.; Roy, B.K.; Subudhi, B. A review on two-link flexible manipulators. Ann. Rev. Control 2016, 42, 346–367. [Google Scholar] [CrossRef]
- Zhang, C.; Wang, L.; Wu, X.; Gao, W. A novel optimal configuration of sensor and actuator using a non-linear integer programming genetic algorithm for active vibration control. J. Intell. Mater. Syst. Struct. 2017. [Google Scholar] [CrossRef]
- Wang, J.; Pi, Y.; Hu, Y.; Zhu, Z.; Zeng, L. Adaptive simultaneous motion and vibration control for a multi flexible-link mechanism with uncertain general harmonic disturbance. J. Sound Vibr. 2017, 408, 60–72. [Google Scholar] [CrossRef]
- Zhang, D.J.; Liu, Y.W.; Houston, R.L. On dynamic stiffening of flexible bodies having high angular velocity. Mech. Struct. Mach. 1996, 24, 313–329. [Google Scholar] [CrossRef]
- Chopra, I. Reviwe of state of art of smart structures and integrated systems. J. AIAA 2002, 40, 2145–2187. [Google Scholar] [CrossRef]
- Alkhatib, R.; Golnaraghi, M.F. Active structural vibration control: A reviwe. Shock Vibr. Digest. 2003, 35, 367–383. [Google Scholar] [CrossRef]
- Preumont, A.; Dufour, J.-P.; Malekian, C. Active damping by a local force feedback with piezoelectric actuators. J. Guidance Control Dyn. 1992, 15, 390–395. [Google Scholar] [CrossRef]
- Giorgio, I.; Culla, A.; Del Vescovo, D. Multimode vibration control using several piezoelectric transducers shunted with a multiterminal network. Arch. Appl. Mech. 2009, 79, 859–879. [Google Scholar] [CrossRef]
- Lumentut, M.F.; Howard, I.M. Effect of shunted piezoelectric control for tuning piezoelectric power harvesting system responses–analytical techniques. Smart Mater. Struct. 2015, 24, 105029. [Google Scholar] [CrossRef]
- Qiu, Z.C.; Han, J.D.; Zhang, X.M. Active vibration control of a flexible beam using a non-collocated acceleration sensor and piezoelectric patch actuator. J. Sound Vibr. 2009, 326, 438–455. [Google Scholar] [CrossRef] [Green Version]
- Zhao, Z.L.; Qiu, Z.C.; Zhang, X.M.; Han, J.D. Vibration control of a pneumatic driven piezoelectric flexible manipulator using self-organizing map based multiple models. Mech. Syst. Signal Process. 2016, 70–71, 345–372. [Google Scholar] [CrossRef]
- Lin, C.Y.; Jheng, H.W. Active vibration suppression of a motor-driven piezoelectric smart structure using adaptive fuzzy sliding mode control and repetitive control. Appl. Sci. 2017, 7, 240. [Google Scholar] [CrossRef]
- Giorgio, I.; Del Vescovo, D. Non-Linear Lumped-Parameter Modeling of Planar Multi-Link Manipulators with Highly Flexible Arms. Robotics 2018, 7, 60. [Google Scholar] [CrossRef]
- Liang, D.; Song, Y.; Sun, T.; Jin, X. Dynamic modeling and hierarchical compound control of a novel 2-DOF flexible parallel manipulator with multiple actuation modes. Mech. Syst. Signal Process. 2018, 103, 413–439. [Google Scholar] [CrossRef]
- Zhang, X.P.; Mills, J.K.; Cleghorn, W.L. Experimental implementation on vibration mode control of a moving 3-PRR flexible parallel manipulator with multiple PZT transducers. J. Vibr. Control. 2010, 16, 2035–2054. [Google Scholar] [CrossRef]
- Zhang, Q.; Li, C.; Zhang, J. Smooth adaptive sliding mode vibration control of a flexible parallel manipulator with multiple smart linkages in modal space. J. Sound Vibr. 2017, 411, 1–19. [Google Scholar] [CrossRef]
- Zhang, Q.H.; Fang, X.R.; Zhang, X.M. Dyanmic analysis of planar 3-RRR flexible parallel robots with dynamic stiffening. Shock Vibr. 2014. [Google Scholar] [CrossRef]
- Zhang, Q.H.; Zhang, X.M. Active residual vibration control of planar 3-RRR flexible parallel robots. Trans. Chin. Soc. Agric. Mach. 2013, 42, 232–237. [Google Scholar]
- Zhang, X.P. Dynamic Modeling and Active Vibration Control of a Planar 3-PRR Parallel Manipulator with Three Flexible Links. Ph.D. Thesis, University of Toronto, Toronto, ON, Canada, 2009. [Google Scholar]
- Hu, J.F. Research on Dynamic Analysis and Vibration Control of Flexible Robot Mechanism. Ph.D. Thesis, South China University of Technology, Guangzhou, China, 2010. (In Chinese). [Google Scholar]




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Active links | Passive links | PZT actuator | PZT sensor | |
|---|---|---|---|---|
| Length (mm) | 0.254 | 0.252 | 0.05 | 0.03 |
| Width (mm) | 0.025 | 0.025 | 0.025 | 0.015 |
| Thickness (mm) | 0.01 | 0.003 | 0.002 | 0.001 |
| Young’s modulus (MP) | 0.7102 × 105 | 1.17106 × 105 | ||
| Density ρ (kg/m3) | 2712 | ~ | ||
| Piezoelectric constant | ~ | 1.86 × 10−10 | ||
| Poisson’s ratio | 0.3 | |||
| Displacements in the X Direction (m) | Displacements in the Y Direction (m) | Elastic Rotation Angles (rad) | ||||
|---|---|---|---|---|---|---|
| <10−3 | <10−4 | <10−3 | <10−4 | <10−2 | <10−3 | |
| Uncontrolled | 1.713 | >3 | 2.553 | >3 | 1.173 | >3 |
| SSRF | 0.7567 | 1.81 | 1.127 | 2.183 | 0.5233 | 1.44 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, Q.; Lu, Q.; Zhang, X.; Wu, J. Study on Residual Vibration Suppress of a 3-DOF Flexible Parallel Robot Mechanism. Sensors 2018, 18, 4145. https://doi.org/10.3390/s18124145
Zhang Q, Lu Q, Zhang X, Wu J. Study on Residual Vibration Suppress of a 3-DOF Flexible Parallel Robot Mechanism. Sensors. 2018; 18(12):4145. https://doi.org/10.3390/s18124145
Chicago/Turabian StyleZhang, Qinghua, Qinghua Lu, Xianmin Zhang, and Junjun Wu. 2018. "Study on Residual Vibration Suppress of a 3-DOF Flexible Parallel Robot Mechanism" Sensors 18, no. 12: 4145. https://doi.org/10.3390/s18124145
APA StyleZhang, Q., Lu, Q., Zhang, X., & Wu, J. (2018). Study on Residual Vibration Suppress of a 3-DOF Flexible Parallel Robot Mechanism. Sensors, 18(12), 4145. https://doi.org/10.3390/s18124145