A High-Resolution Leaky Coaxial Cable Sensor Using a Wideband Chaotic Signal

 ,
,
Abstract
:1. Introduction
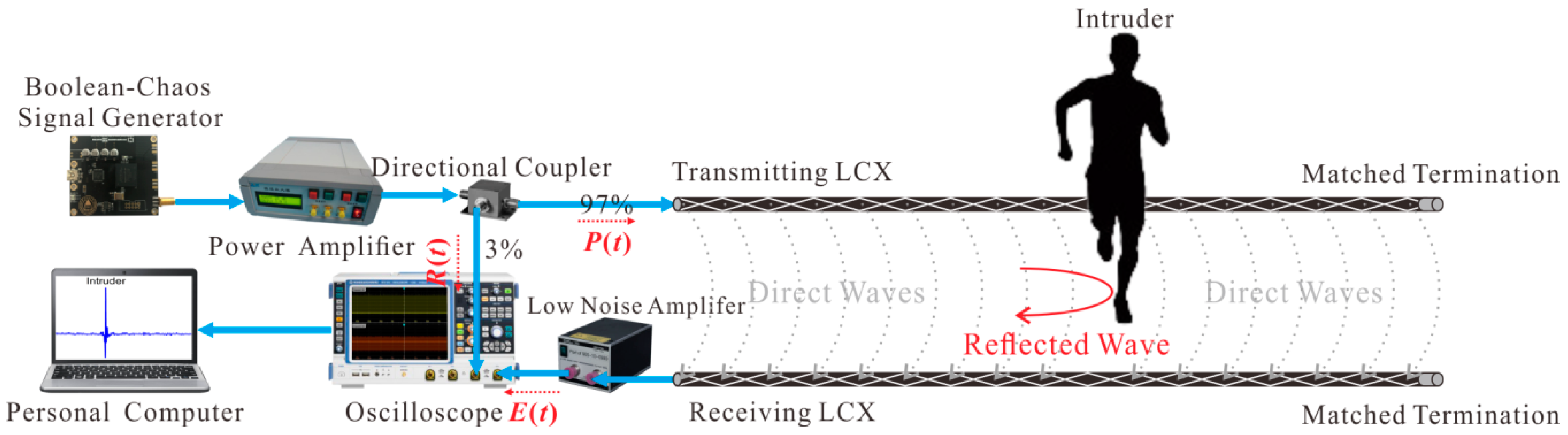
2. Experimental Setup
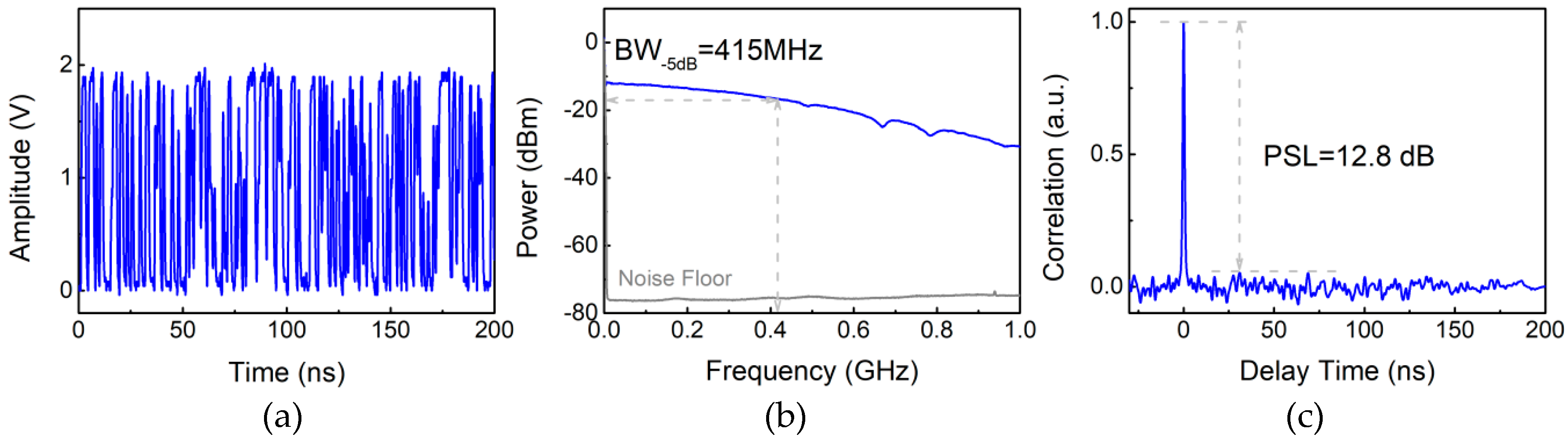
3. Generation and Characteristics of Boolean-Chaos Signal
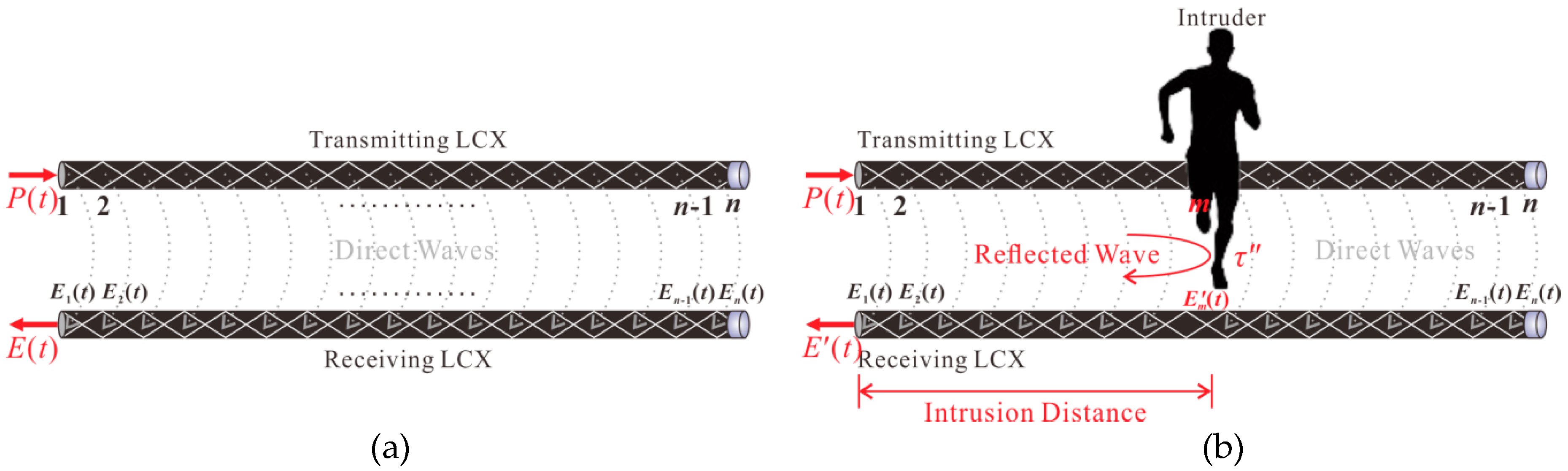
4. Measure Principle
5. Experimental Results
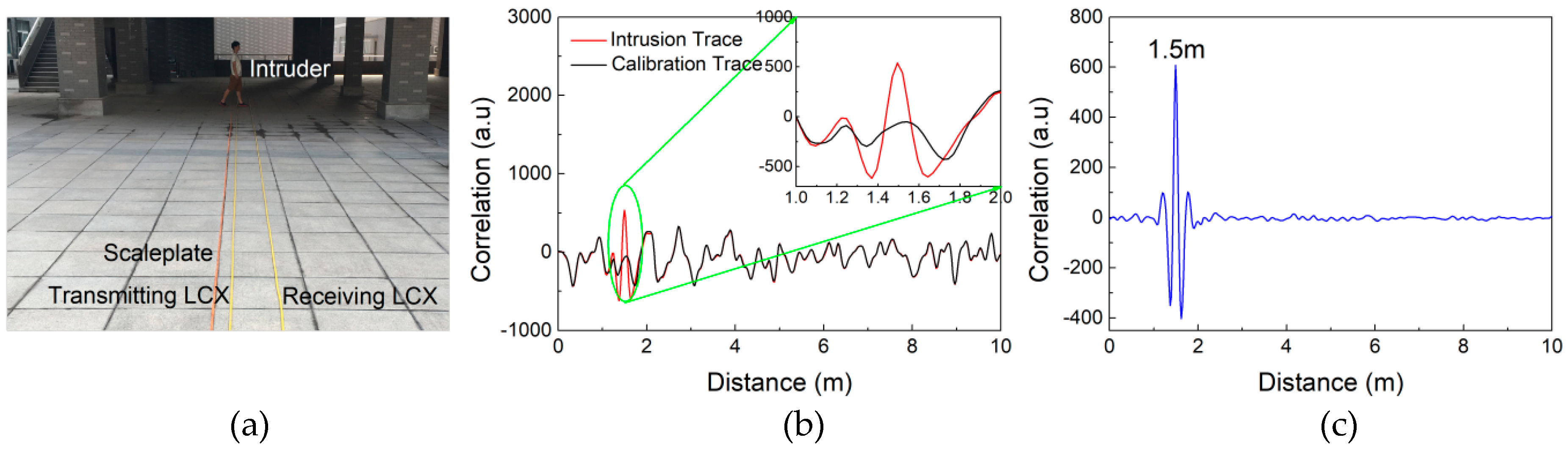
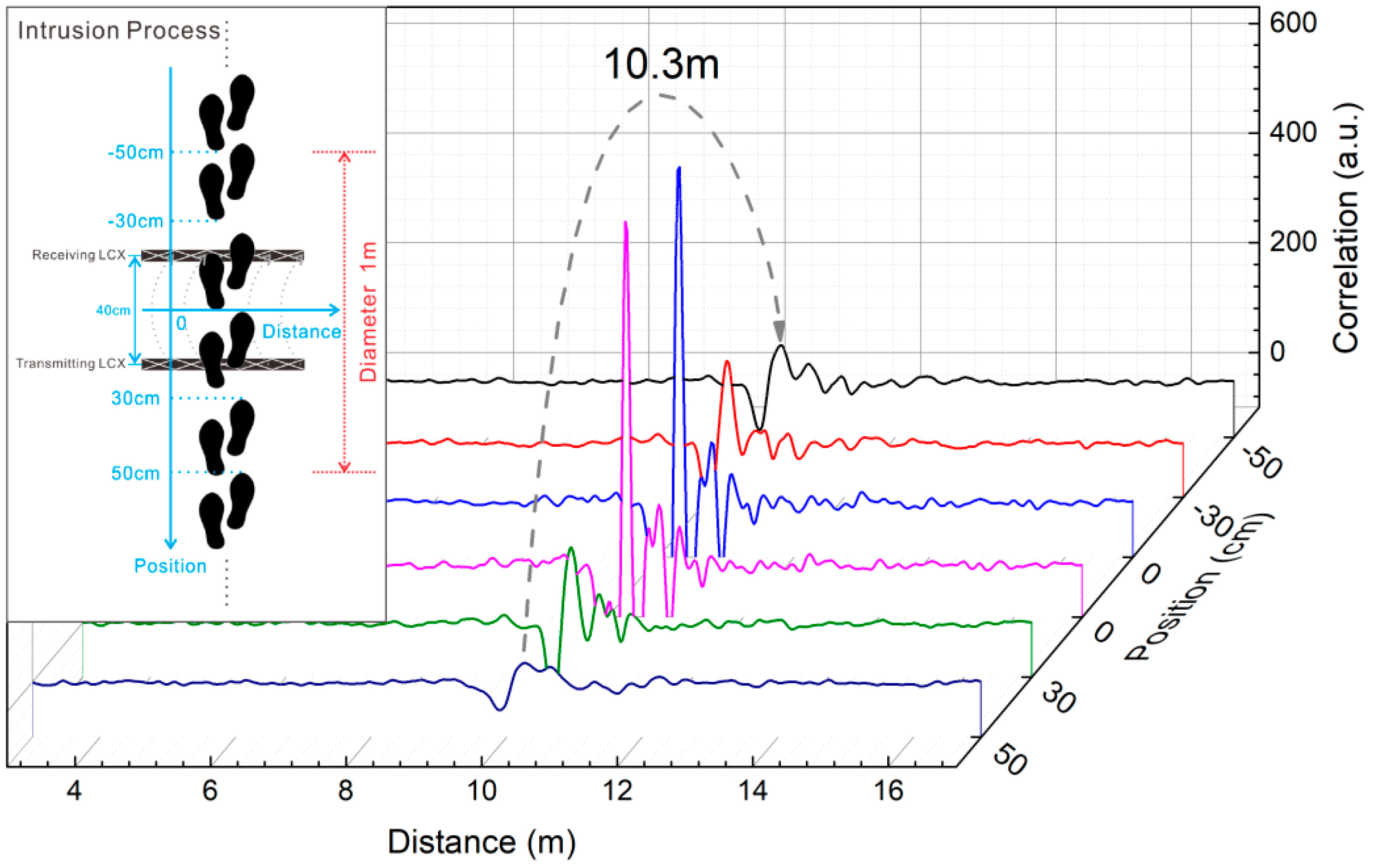
5.1. Detection of Single Intruder
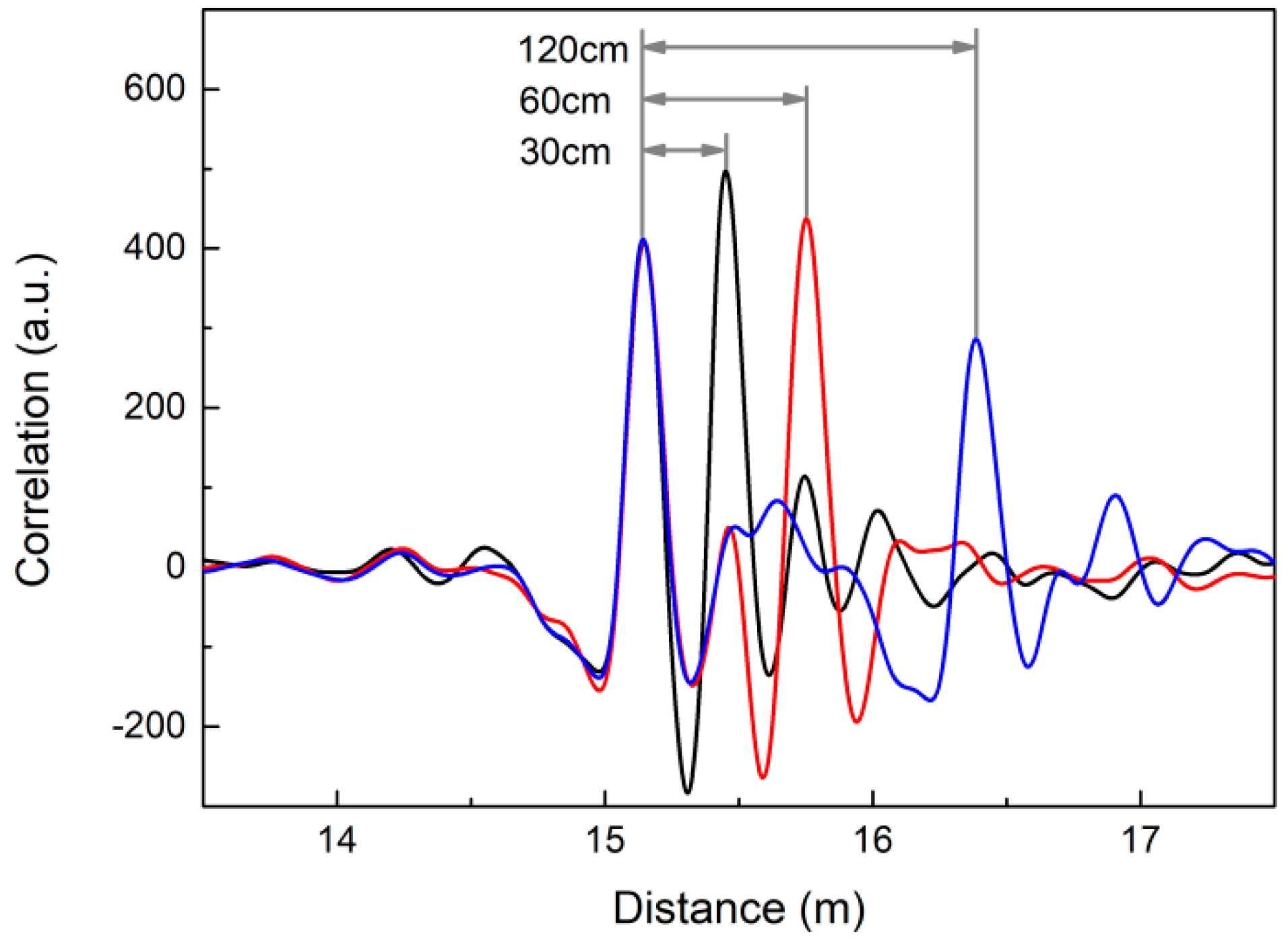
5.2. Detection of Multiple Intruders
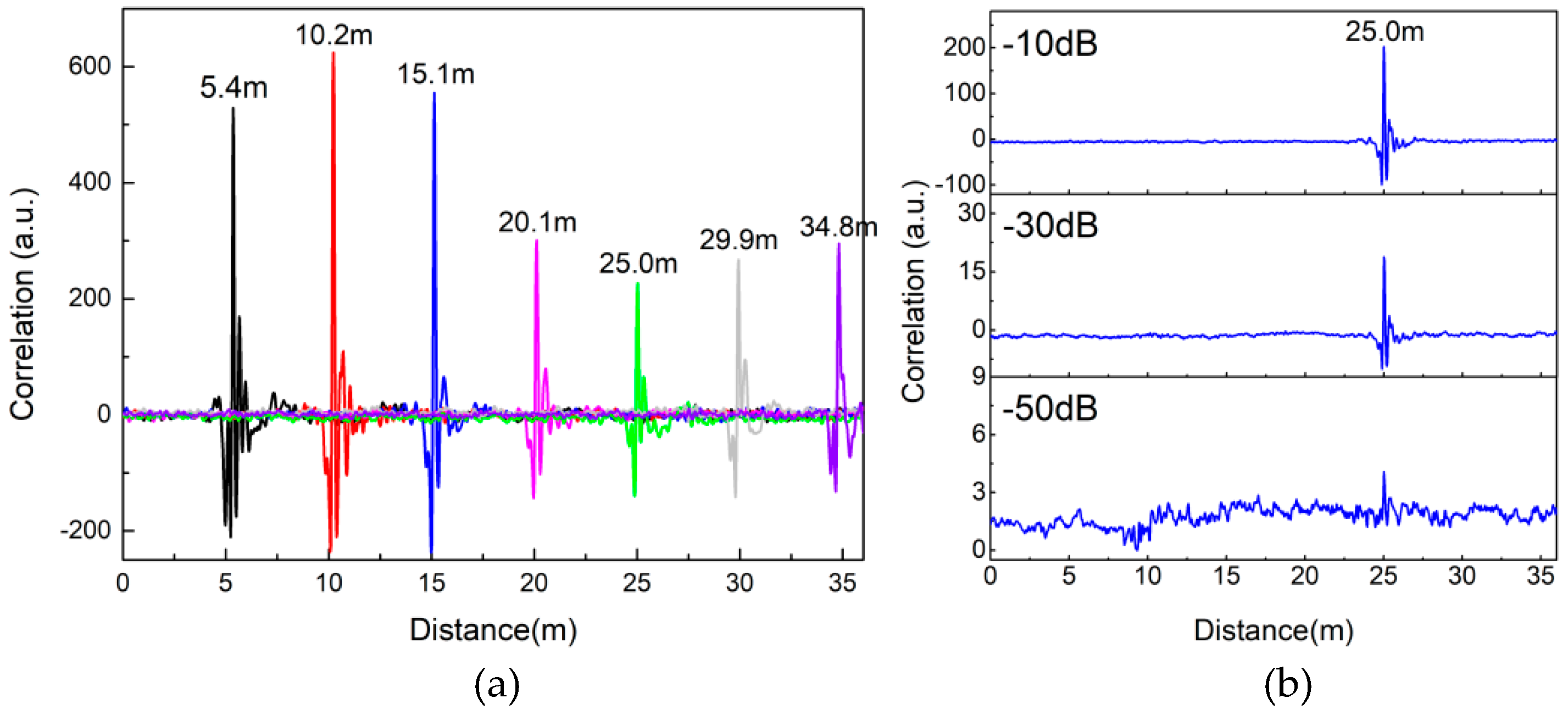
5.3. Anti-Interference Analysis
6. Discussions
7. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Sage, K.; Young, S. Security Applications of Computer Vision. IEEE Aerosp. Electron. Syst. Mag. 1999, 14, 19–29. [Google Scholar] [CrossRef]
- Mick, P.; Beck, D. Video-Type Universal Motion and Intrusion Detection System. U.S. Patent 3,988,533, 26 October 1976. Available online: http://www.freepatentsonline.com/3988533.html (accessed on 31 October 2018).
- Moghavvemi, M.; Seng, L.C. Pyroelectric Infrared Sensor for Intruder Detection. In Proceedings of the 2004 IEEE Region 10 Conference TENCON 2004, Chiang Mai, Thailand, 24 November 2004; pp. 656–659. [Google Scholar]
- Berman, H.L. Infrared Intrusion Detector System. U.S. Patent 3,703,718, 21 November 1972. Available online: http://www.freepatentsonline.com/3703718.html (accessed on 31 October 2018).
- Butler, W.; Poitevin, P.; Bjomholt, J. Benefits of Wide Area Intrusion Detection Systems Using FMCW Radar. In Proceedings of the 2007 41st Annual IEEE International Carnahan Conference on Security Technology, Ottawa, ON, Canada, 8–11 October 2007; pp. 176–182. [Google Scholar]
- Butler, W. Design Considerations for Intrusion Detection Wide Area Surveillance Radars for Perimeters and Borders. In Proceedings of the 2008 IEEE Conference on Technologies for Homeland Security, Waltham, MA, USA, 12–13 May 2008; pp. 47–50. [Google Scholar]
- Allwood, G.; Wild, G.; Hinckley, S. Optical Fiber Sensors in Physical Intrusion Detection Systems: A Review. IEEE Sens. J. 2016, 16, 5497–5509. [Google Scholar] [CrossRef]
- Catalano, A.; Bruno, F.A.; Pisco, M.; Cutolo, A.; Cusano, A. An Intrusion Detection System for the Protection of Railway Assets Using Fiber Bragg Grating Sensors. Sensors 2014, 14, 18268–18285. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Catalano, A.; Bruno, F.A.; Galliano, C.; Pisco, M.; Persiano, G.V.; Cutolo, A.; Cusano, A. An Optical Fiber Intrusion Detection System for Railway Security. Sens. Actuators A Phys. 2017, 253, 91–100. [Google Scholar] [CrossRef]
- Harman, R.K. Intrepid MicroTrack Leaky Cable Sensor. In Proceedings of the 2002 36th Annual IEEE International Carnahan Conference on Security Technology, Atlantic City, NJ, USA, 24 October 2002; pp. 191–197. [Google Scholar]
- Cheal, J.; O’Brien, S.; Tutor, M. Buried Cable Sensor with Intruder Location. IEEE Aerosp. Electron. Syst. Mag. 2005, 20, 11–15. [Google Scholar] [CrossRef]
- Harman, R.K.; Siedlarz, J.E. Advancements in Leaky Cable Technology for Intrusion Detection. In Proceedings of the 1982 Carnahan Conference on Security Technology, Lexington, KY, USA, 12–15 May 1982; pp. 115–121. [Google Scholar]
- Wang, M.J.; Zhang, Y.; Li, Y.S.; Cao, W. Simple-Alone High Precision Perimeter Intruder Location Warning System. Chin. J. Sci. Instrum. 2006, 27, 1718–1720. (In Chinese) [Google Scholar] [CrossRef]
- Mackay, N.A.M.; Penstone, S.R. A High-Sensitivity Narrow-Band Time-Domain Reflectometer. IEEE Trans. Instrum. Meas. 1974, 23, 155–158. [Google Scholar] [CrossRef]
- Mackay, N.A.; Beattie, D.G. High-Resolution Guided Radar System. Electron. Lett. 1976, 12, 583–584. [Google Scholar] [CrossRef]
- Harman, R.K.; Mackay, N.A.M. GUIDAR: An Intrusion Detection System for Perimeter Protection. In Proceedings of the 1976 Carnahan Conference on Crime Countermeasures, Lexington, KY, USA, 5–7 May 1976; pp. 155–159. [Google Scholar]
- Patterson, R.E.; Mackay, N.A.M. A Guided Radar System for Obstacle Detection. IEEE Trans. Instrum. Meas. 1977, 26, 137–143. [Google Scholar] [CrossRef]
- Gale, D.J.; Beal, J.C. Comparative Testing of Leaky Coaxial Cables for Communications and Guided Radar. IEEE Trans. Microw. Theory Technol. 1980, 28, 1006–1013. [Google Scholar] [CrossRef]
- Harman, R.K. Intrepid: A New Outdoor Perimeter Sensor Technology. In Proceedings of the 1994 28th Annual IEEE International Carnahan Conference on Security Technology, Albuquerque, NM, USA, 12–14 October 1994; pp. 137–143. Available online: https://ieeexplore.ieee.org/abstract/document/363778 (accessed on 31 October 2018). [CrossRef]
- Guan, Q.; Chen, C.C.; He, C.X. A Novel Sensor Using VHF Zigzag-Slotted Leaky Coaxial Cable for Intruder Localization. Microw. Opt. Technol. Lett. 2018, 60, 634–639. [Google Scholar] [CrossRef]
- Inomata, K.; Hirai, T.; Sumi, K.; Tanaka, K. Wide-Area Surveillance Sensor with Leaky Coaxial Cables. In Proceedings of the 2006 SICE-ICASE International Joint Conference, Busan, South Korea, 18–21 October 2006; pp. 959–963. [Google Scholar]
- Harman, K.; Hodgins, B. Next Generation of GUIDAR Technology. IEEE Aerosp. Electron. Syst. Mag. 2005, 20, 16–26. Available online: https://ieeexplore.ieee.org/document/1432570 (accessed on 31 October 2018). [CrossRef]
- Harman, K.; Hodgins, B. The Next Generation of GUIDAR Technology. In Proceedings of the 2004 38th Annual IEEE International Carnahan Conference on Security Technology, Albuquerque, NM, USA, 11–14 October 2004; pp. 169–176. [Google Scholar]
- Harman, K.; Hodgins, B.; Patchell, J. Experience with Ranging Buried Cable Sensing. In Proceedings of the 2007 41st Annual IEEE International Carnahan Conference on Security Technology, Ottawa, ON, Canada, 8–11 October 2007; pp. 193–200. [Google Scholar]
- Lin, F.Y.; Liu, J.M. Chaotic Radar Using Nonlinear Laser Dynamics. IEEE J. Quantum Electron. 2004, 40, 815–820. [Google Scholar] [CrossRef]
- Xu, H.; Li, Y.; Zhang, J.G.; Han, H.; Zhang, B.; Wang, L.S.; Wang, Y.C.; Wang, A.B. Ultra-Wideband Chaos Life-Detection Radar with Sinusoidal Wave Modulation. Int. J. Bifurc. Chaos 2017, 27, 1730046. [Google Scholar] [CrossRef]
- Lin, F.Y.; Liu, J.M. Chaotic Lidar. IEEE J. Sel. Top. Quantum Electron. 2004, 10, 991–997. [Google Scholar] [CrossRef]
- Cheng, C.H.; Chen, C.Y.; Chen, J.D.; Pan, D.K.; Ting, K.T.; Lin, F.Y. 3D Pulsed Chaos Lidar System. Opt. Express 2018, 26, 12230–12241. [Google Scholar] [CrossRef] [PubMed]
- Zhang, J.G.; Xu, H.; Wang, B.J.; Liu, L.; Su, P.C.; Li, J.X. Wiring Fault Detection with Boolean-Chaos Time-Domain Reflectometry. Nonlinear Dyn. 2015, 80, 553–559. [Google Scholar] [CrossRef]
- Li, J.X.; Xu, H.; Liu, L.; Su, P.C.; Zhang, J.G. Chaotic Optical Time-Domain Reflectometry Using a Distributed Feedback Laser Diode Modulated by an Improved Colpitts Oscillator. Opt. Eng. 2015, 54, 056101. [Google Scholar] [CrossRef]
- Li, J.X.; Wang, Y.C.; Ma, F.C. Experimental Demonstration of 1.5 GHz Chaos Generation Using an Improved Colpitts Oscillator. Nonlinear Dyn. 2013, 72, 575–580. [Google Scholar] [CrossRef]
- Efremova, E.V. Model of a SiGe 130-nm 10-to 30-GHz Chaotic Self-Oscillating System. Tech. Phys. Lett. 2018, 44, 378–380. [Google Scholar] [CrossRef]
- Wang, L.S.; Guo, Y.Y.; Li, P.; Zhao, T.; Wang, Y.C.; Wang, A.B. White-Chaos Radar with Enhanced Range Resolution and Anti-Jamming Capability. IEEE Photon. Technol. Lett. 2017, 29, 1723–1726. [Google Scholar] [CrossRef]
- Liu, L.; Ma, R.X.; Li, J.X.; Zhang, J.G.; Wang, B.J. Anti-Jamming Property of Colpitts-Based Direct Chaotic Through-Wall Imaging Radar. J. Electromagn. Waves Appl. 2016, 30, 2268–2279. [Google Scholar] [CrossRef]
- Zhang, R.; Cavalcante, H.L.D.S.; Gao, Z.; Gauthier, D.J.; Socolar, J.E.; Adams, M.M.; Lathrop, D.P. Boolean Chaos. Phys. Rev. E: Stat. Nonlinear Soft Matter Phys. 2009, 80, 045202. [Google Scholar] [CrossRef] [PubMed]
- Wang, A.B.; Wang, Y.C. Chaos Correlation Optical Time Domain Reflectometry. Sci. China Inf. Sci. 2010, 53, 398–404. [Google Scholar] [CrossRef]
- Rosin, D.P.; Rontani, D.; Gauthier, D.J. Ultrafast Physical Generation of Random Numbers Using Hybrid Boolean Networks. Phys. Rev. E: Stat. Nonlinear Soft Matter Phys. 2013, 87, 040902. [Google Scholar] [CrossRef] [PubMed]
- Ma, L.; Zhang, J.G.; Li, P.; Xu, H.; Wang, Y.C. High-Speed Physical Random Number Generator Based on Autonomous Boolean Networks. J. Cent. South Univ. 2018, 49, 888–892. (In Chinese) [Google Scholar] [CrossRef]
- Colak, B.; Cerezci, O.; Demir, Z.; Yazici, M.; Turetken, B.; Araz, I. Calculation of Leakage through Apertures on Coaxial Cable Braided Screens. In Proceedings of the 2002 International Conference on Mathematical Methods in Electromagnetic Theory, Kiev, Ukraine, 10–13 September 2002; pp. 473–475. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Devices | Pass-Band/Bandwidth | Other Parameters |
|---|---|---|
| Power amplifier | 75 Hz–10 GHz | Max gain: 25 dB |
| Directional coupler Low noise amplifier Oscilloscope LCXs | 1 MHz–1 GHz 9 kHz–1 GHz 2 GHz ≤450 MHz | Coupling degree: 15 dB Max gain: 32 dB Sampling rate: 10 GSa/s |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xu, H.; Qiao, J.; Zhang, J.; Han, H.; Li, J.; Liu, L.; Wang, B. A High-Resolution Leaky Coaxial Cable Sensor Using a Wideband Chaotic Signal. Sensors 2018, 18, 4154. https://doi.org/10.3390/s18124154
Xu H, Qiao J, Zhang J, Han H, Li J, Liu L, Wang B. A High-Resolution Leaky Coaxial Cable Sensor Using a Wideband Chaotic Signal. Sensors. 2018; 18(12):4154. https://doi.org/10.3390/s18124154
Chicago/Turabian StyleXu, Hang, Jun Qiao, Jianguo Zhang, Hong Han, Jingxia Li, Li Liu, and Bingjie Wang. 2018. "A High-Resolution Leaky Coaxial Cable Sensor Using a Wideband Chaotic Signal" Sensors 18, no. 12: 4154. https://doi.org/10.3390/s18124154
APA StyleXu, H., Qiao, J., Zhang, J., Han, H., Li, J., Liu, L., & Wang, B. (2018). A High-Resolution Leaky Coaxial Cable Sensor Using a Wideband Chaotic Signal. Sensors, 18(12), 4154. https://doi.org/10.3390/s18124154