Joint Transmission Power Control and Relay Cooperation for WBAN Systems


Abstract
:1. Introduction
- Motivated by the significant autocorrelation feature of on-body channels, we propose an adaptive TPC algorithm. The new TPC method optimizes the transmission power level based on the autocorrelation characteristic between two consecutive superframes.
- Since DSS operations are carried out at the hub, a DSS mechanism is incorporated into the newly proposed TPC method to further optimize the transmission power.
- The combination of TPC and two-hop relay cooperation is explored. We detail the protocol implementation on the basis of IEEE 802.15.6, including relay node selection, relayed node selection and adaptive allocation of relay slots (these terms are explained below).
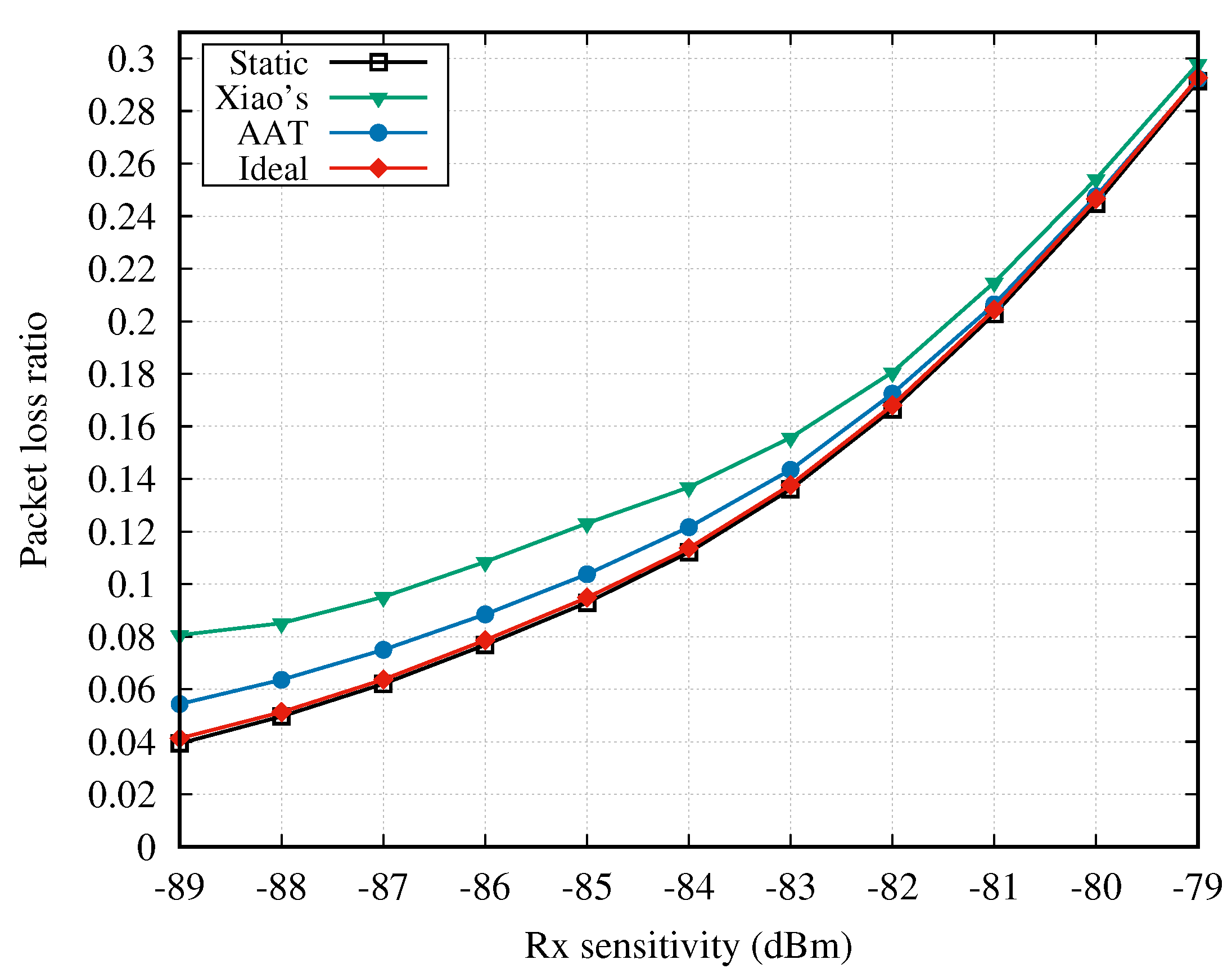
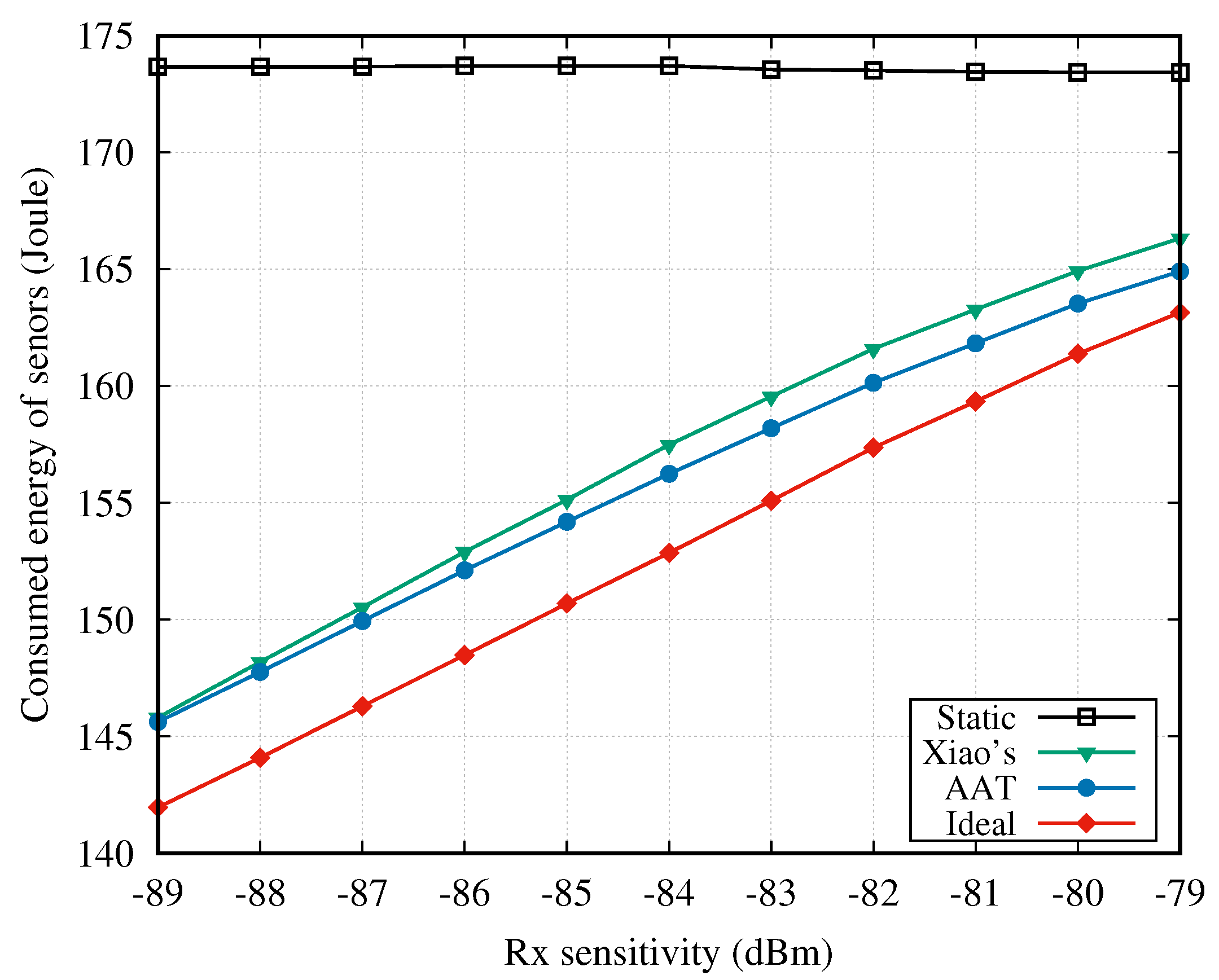
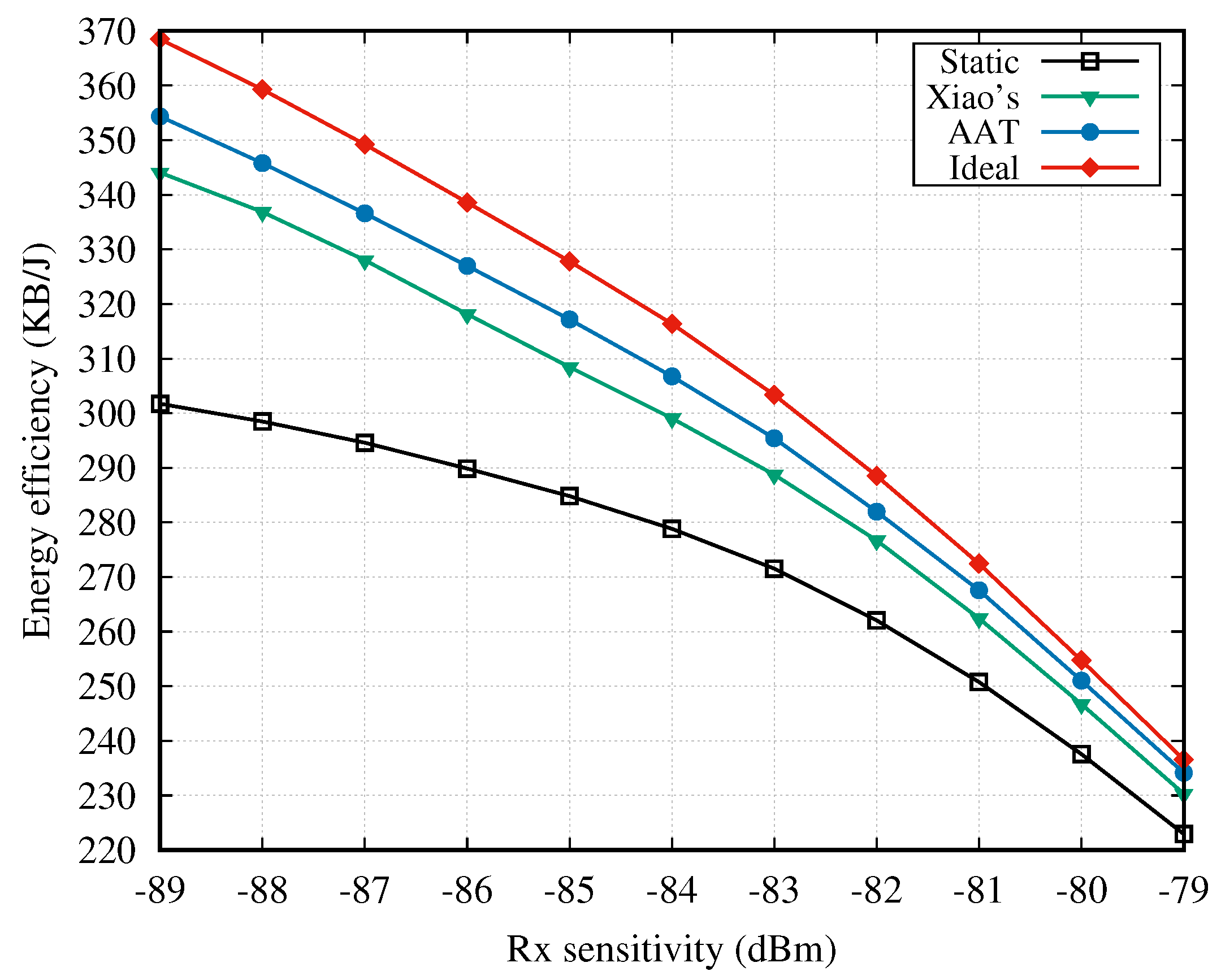
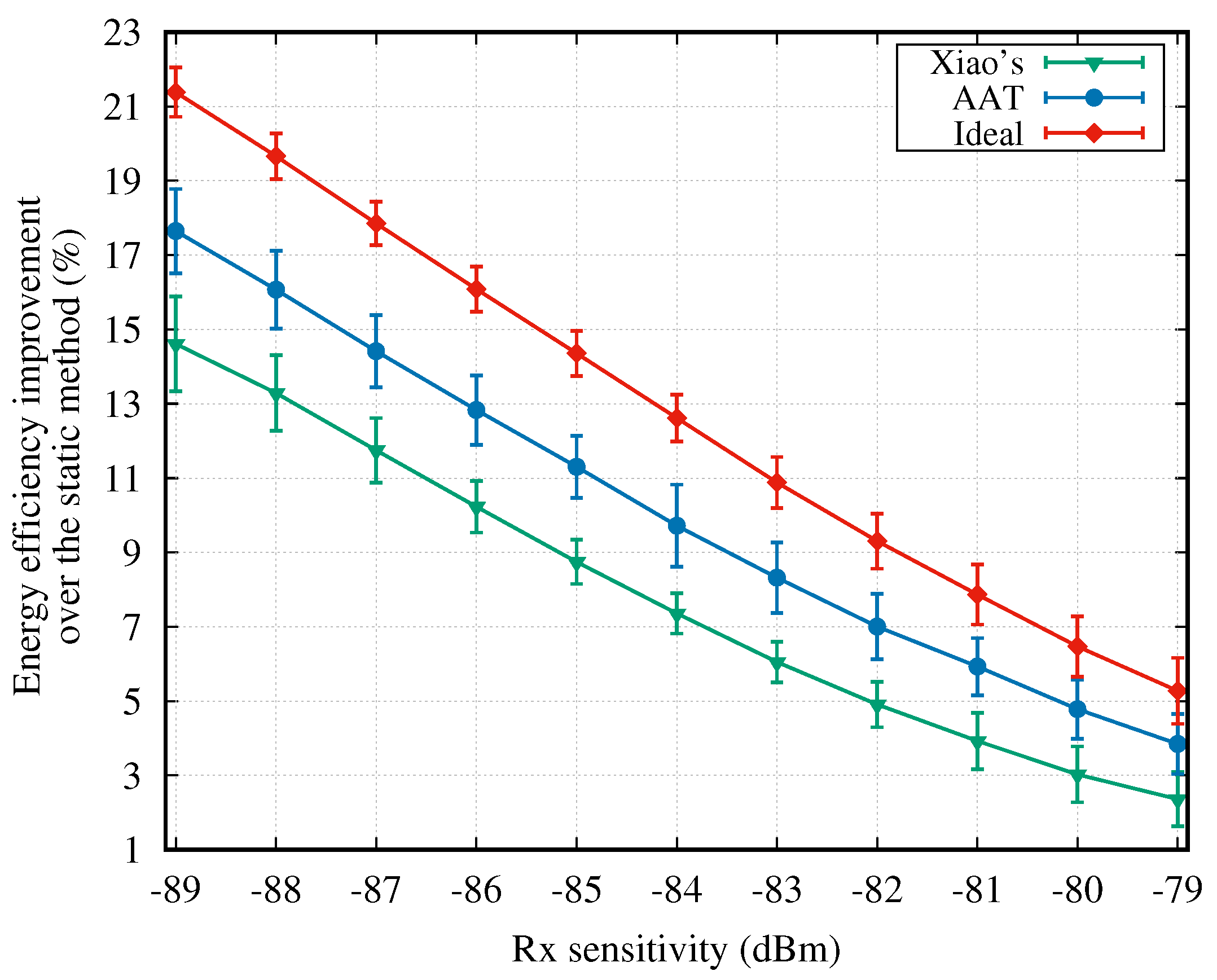
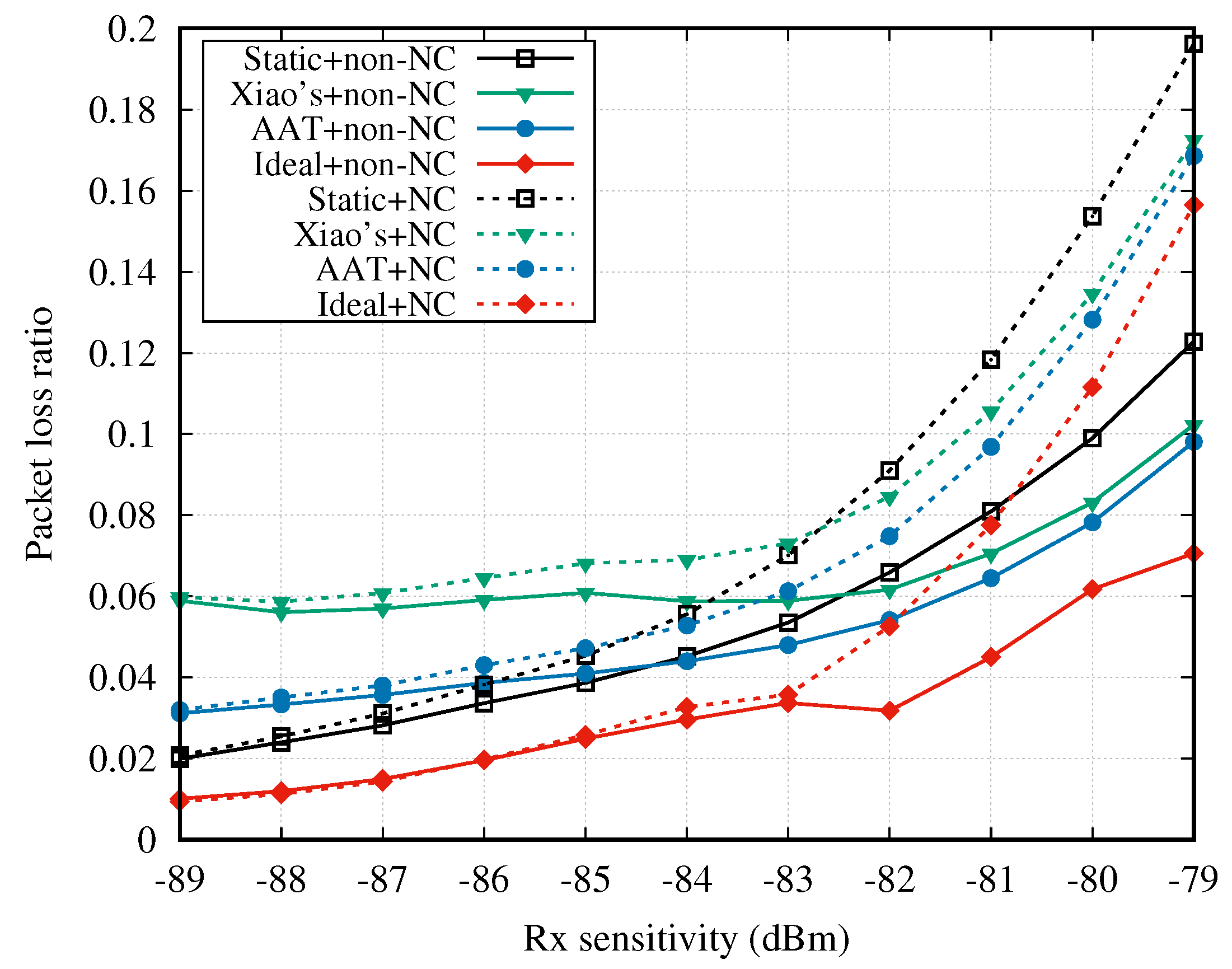
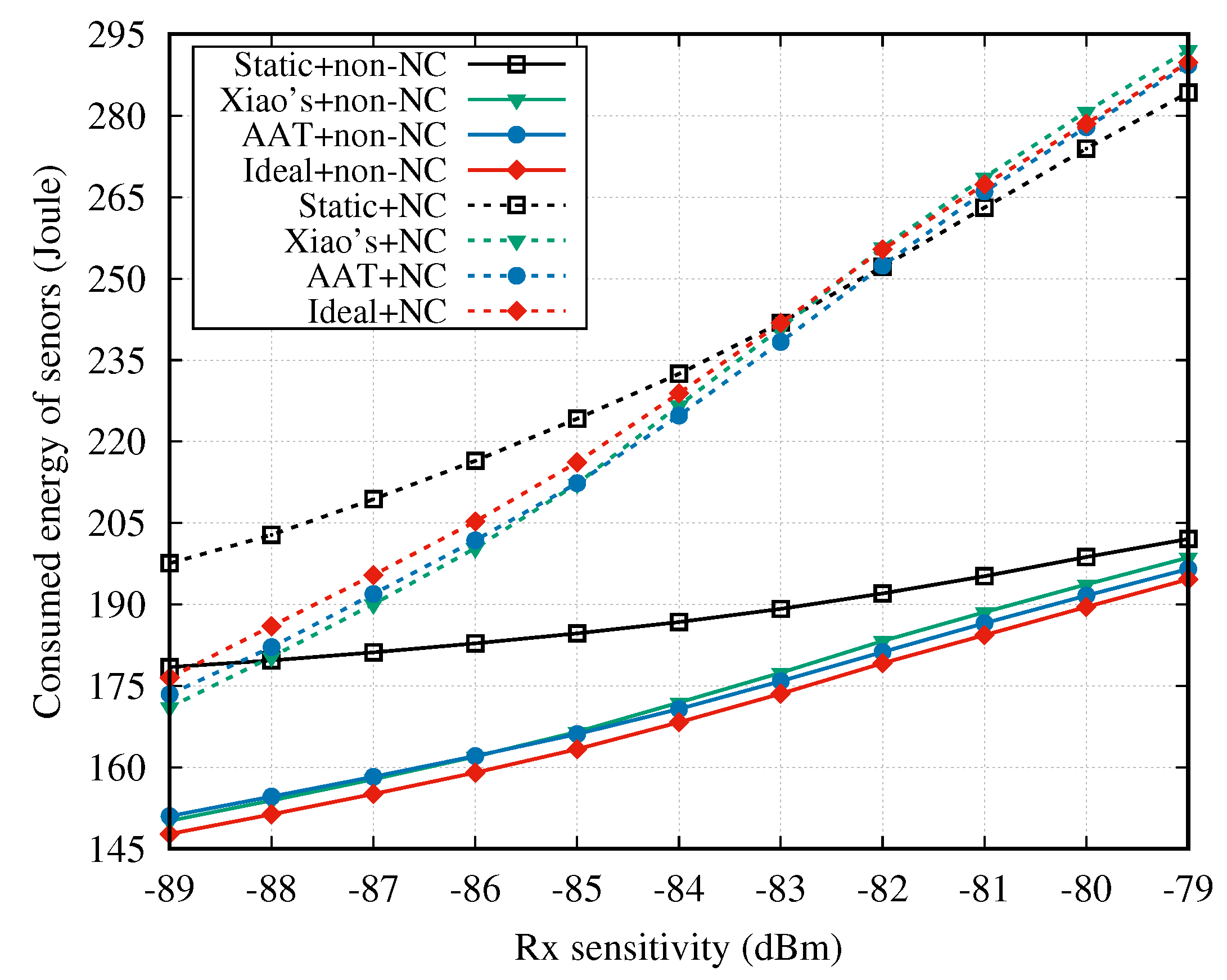
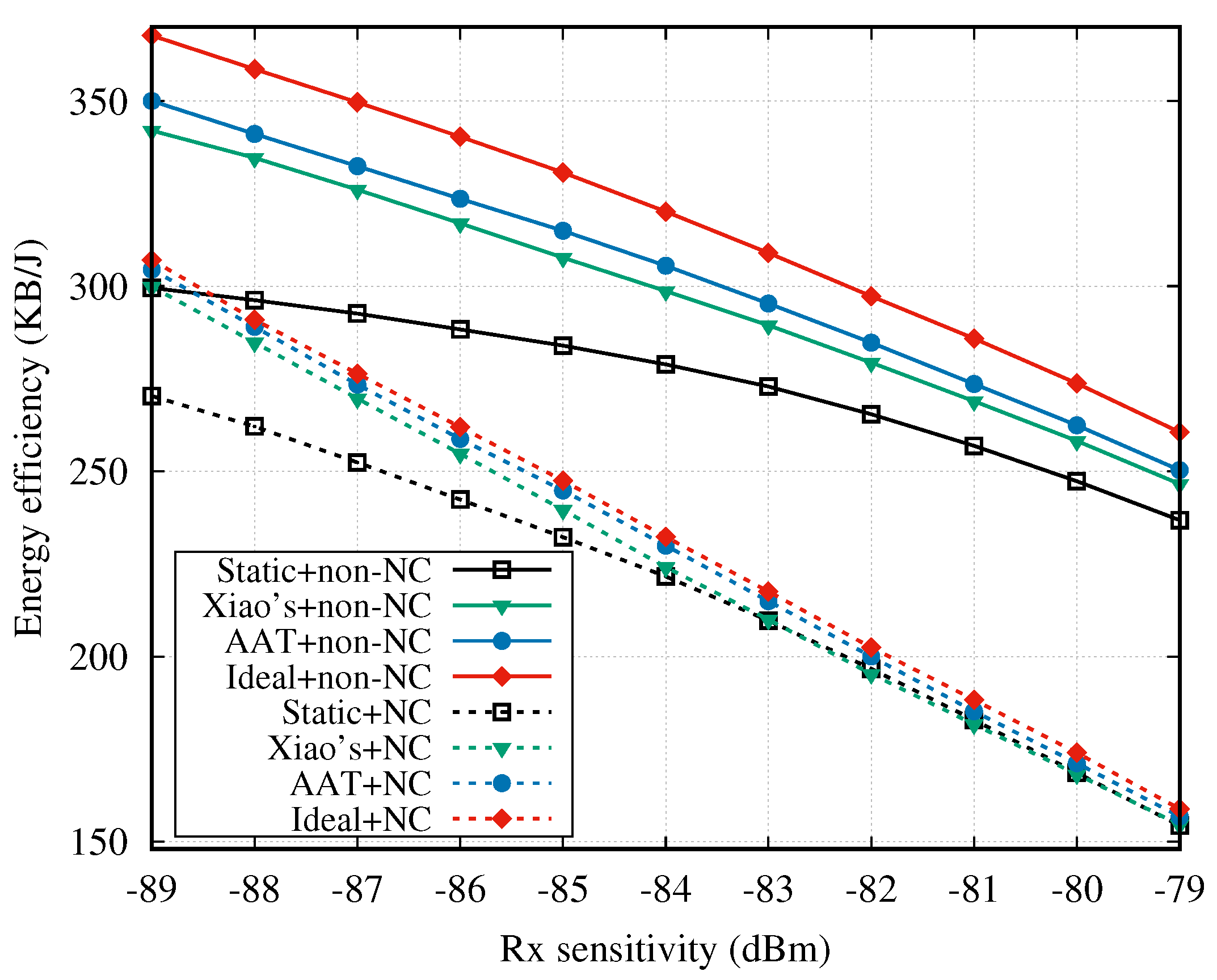
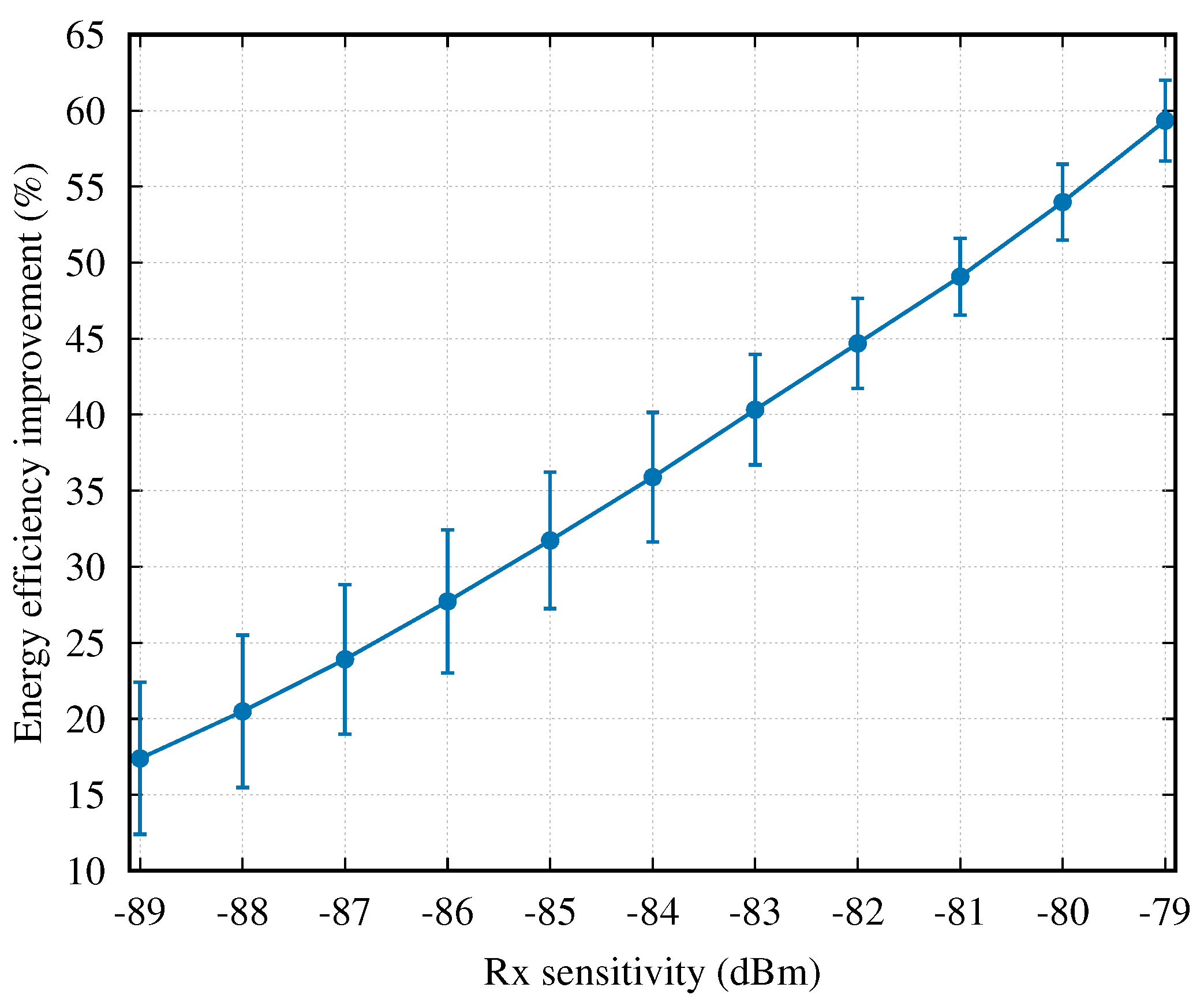
- The performance of the proposed protocol was evaluated using the measured channel data collected from the real daily scenarios. The evaluation results show that the newly proposed protocol achieves remarkably lower PLR (Packet Loss Ratio) while the energy consumption remains at a low level.
2. System Model
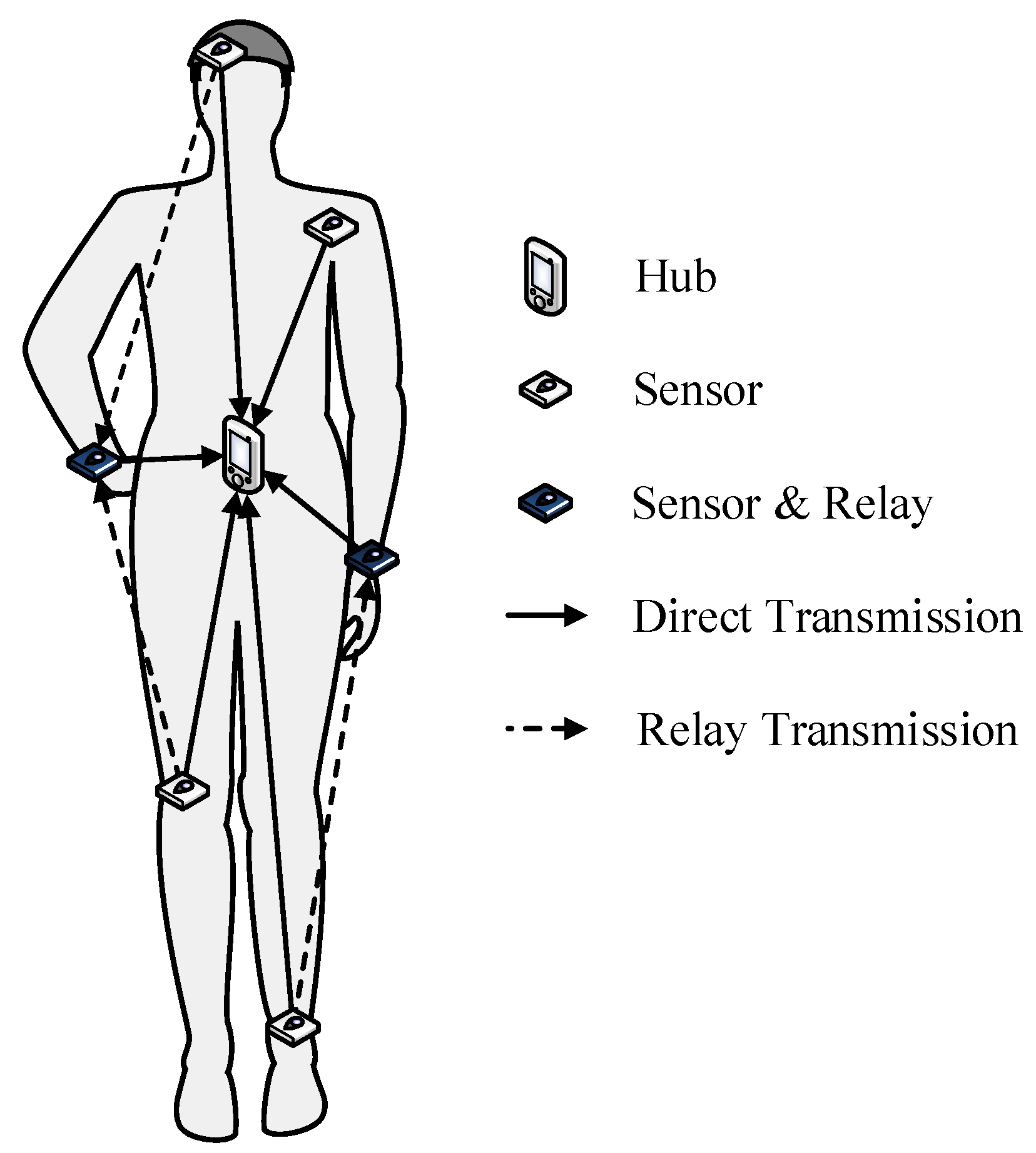
2.1. Network Model
2.2. Channel Model
2.2.1. Direct Channel Model
2.2.2. Relay Channel Model
2.3. Energy Consumption Model
3. Proposed Transmission Scheme
- The hub keeps track of the channel conditions from all sensor nodes, and then predicts the channel condition in the next TDMA round based on a temporal autocorrelation model.
- Based on these predicted channel conditions, the hub adjusts the transmission power and reschedules the SUI order for all sensors.
- After configuring the transmission power and SUI order, some channels may still be predicted to be in an outage state. In this case, the hub selects the relay and relayed nodes based on the predicted channel conditions, and then schedules the relay slots adaptively.
3.1. Channel Condition Prediction
3.2. Transmission Power Control
| Algorithm 1: Adaptive transmission power control method. |
 |
3.3. Two-Hop Cooperative Option for AAT
- Relayed node selection: When the estimated channel gain in the next superframe () is below the Rx sensitivity, the corresponding sensor node is selected as a relayed node. The rationale for the selection is that, when is smaller than the Rx sensitivity, even if the transmission power is set to the maximum (0 dBm), the ) would still be below the Rx sensitivity. Note that the maximal number of the relayed nodes is limited by the length of DTP. If DTP is q times longer than one SUI, then at most q sensor nodes can be set as relayed node. Therefore, if more than q sensors satisfy the above condition for relayed node selection, the q sensors with the worst channel gains are selected.
- Relay node selection: In this paper, only one relay node is considered. Besides, to avoid some sensor nodes to be selected as relay nodes frequently, all sensor nodes whose predicted channel gains are greater than the Rx sensitivity are the candidate for becoming a relay node. Then, the actual relay node is randomly selected from these candidates.
- Time slot scheduling for the relay node: There is no additional action for a sensor node when the node is selected as a relayed node. However, there are some extra radio state transitions and packet relaying tasks for the selected relay node. Similar to the TPC decision broadcast, the relayed and relay nodes selection results are also included in the beacon packet. Upon receiving the beacon packet, all sensor nodes check whether they are selected as a relay node. If yes, the relay node would turn to the state during the SUI(s) of the relayed node(s), and then relay the received packet(s) to the hub during RTP.
4. Performance Evaluation
- Static scheme: The hub does not control the transmission power level of the sensor nodes. The transmission power is fixed at a predefined value, which is selected to be at 0 dBm. Besides, the static scheme does not change the slot scheduling of sensors. In other words, the permutation of SUIs is fixed after assigned randomly in the first superframe.
- Xiao’s scheme: This TPC method, as proposed in [7], adapts the transmission power level based on the variation of channel conditions. Specifically, the hub node alters the transmission power level according to the feedback RSSI value obtained from the sensor node. The latest feedback RSSI value and previous average RSSI are jointly considered to estimate the new average RSSI (), and the new transmission power level is configured based on the comparison between the new average RSSI and the two configured thresholds and . If drops below the lower threshold , then the transmission power is doubled. If is above the upper threshold , the transmission power is reduced by a fixed constant. Based on different weighting configurations (i.e., and ) between the latest RSSI and previous , three TPC schemes, namely Conservative, Balance and Aggressive, are designed for different applications with different requirements in terms of PLR and energy consumption. Considering the significant autocorrelation of on-body channels, the Balance scheme with and was chosen as the TPC method for comparison.
- AAT scheme: This is the adaptive transmission scheme proposed in this paper. Unlike Xiao’s scheme, a temporal autocorrelation model is adopted to adjust the weight between the latest channel gain and the sample mean of historical channel gains. Moreover, the permutation of SUIs is also taken into account to optimize the transmission power margin. The two margin parameters, i.e., and , were set to 0.6 and 0.2, respectively.
- Ideal scheme: In the ideal scheme, the hub knows all the channel gain information for the next superframe. Accordingly, the transmission power could be set at the most suitable level, which not only avoids unnecessary energy wastage but also keeps the PLR at the lowest level. This scheme was considered to explore the upper bound of TPC approaches. Note that this method is infeasible for real WBAN systems because it assumes perfect prediction of future states.
4.1. Simulation Model and Configurations
4.2. Simulation Results
4.2.1. Adaptive Transmission without Cooperation
4.2.2. Adaptive Transmission with Cooperation
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| AAT | Autocorrelation-based Adaptive Transmission |
| DSS | Dynamic Slot Scheduling |
| DTP | Direct Transmission Phase |
| IEEE | Institute of Electrical and Electronics Engineers |
| ISI | Inter-Symbol Interference (ISI) |
| ISM | Industrial, Scientific and Medical |
| LQI | Link Quality Indication |
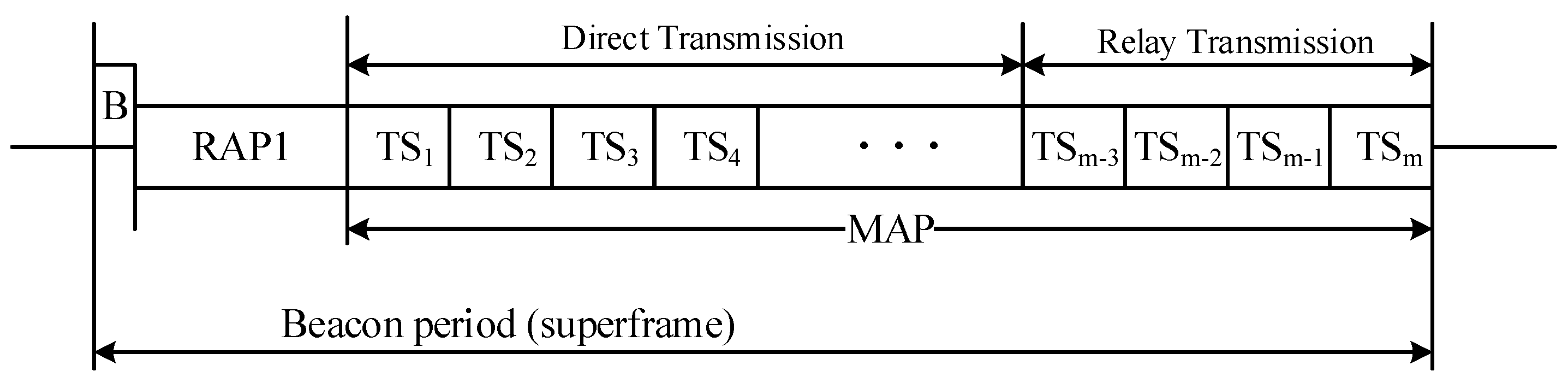
| MAP | Managed Access Phases |
| N-Ack | No Acknowledgement |
| NC | Network Coding |
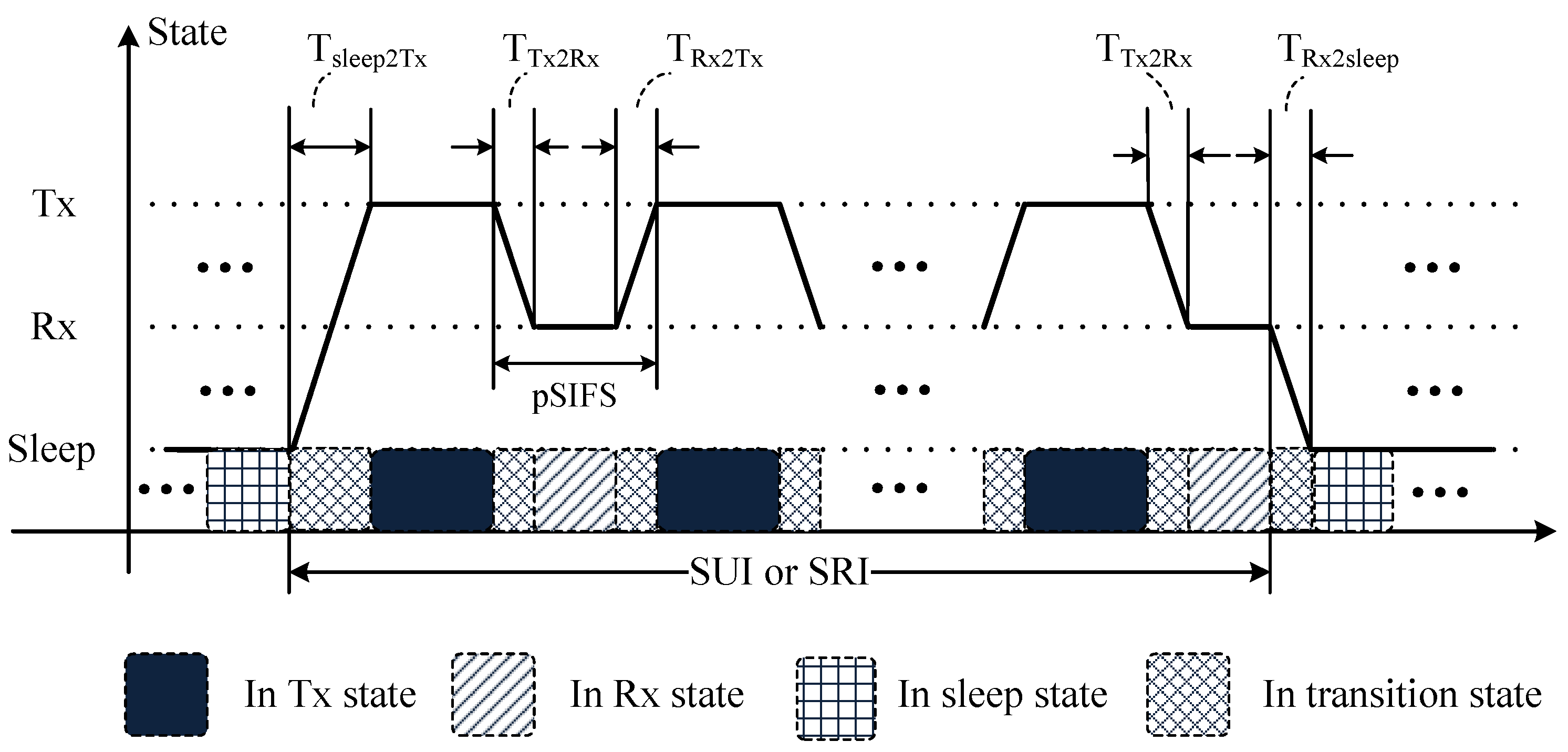
| pSIFS | Short Interframe Separation Time |
| QoS | Quality of Service |
| PLR | Packet Loss Ratio |
| RLNC | Random Linear Network Coding |
| RSSI | Received Signal Strength Indicator |
| RTP | Relay Transmission Phase |
| SAR | Specific Absorption Rate |
| SUI | Scheduled Uplink Interval |
| TAM | Temporal Autocorrelation Model |
| TDMA | Time-Division Multiple Access |
| TPC | Transmission Power Control |
| WBAN | Wireless Body Area Network |
| WSN | Wireless Sensor Network |
| WSS | Wide Sense Stationary |
References
- IEEE Standards Association. IEEE Standard for Local and Metropolitan Area Networks—Part 15.6: Wireless Body Area Networks; IEEE Standard 802.15.6-2012; IEEE: Piscataway, NJ, USA, 2012; pp. 1–271. [Google Scholar]
- Yazdandoost, K.Y.; Sayrafian-Pour, K. Channel Model for Body Area Network (BAN); IEEE: Piscataway, NJ, USA, 2009. [Google Scholar]
- Sudjai, M.; Tran, L.C.; Safaei, F. Performance analysis of STFC MB-OFDM UWB in WBAN channels. In Proceedings of the IEEE International Symposium on Personal, Indoor and Mobile Radio Communications (PIMRC), Sydney, Australia, 9–12 September 2012; pp. 1710–1715. [Google Scholar]
- Zhang, H.; Safaei, F.; Tran, L.C. Channel autocorrelation-based dynamic slot scheduling for body area networks. EURASIP J. Wirel. Commun. Netw. 2018, 2018, 1–17. [Google Scholar] [CrossRef]
- Ullah, S.; Higgins, H.; Braem, B.; Latre, B.; Blondia, C.; Moerman, I.; Saleem, S.; Rahman, Z.; Kwak, K.S. A Comprehensive Survey of Wireless Body Area Networks. J. Med. Syst. 2012, 36, 1065–1094. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Tang, Q.; Tummala, N.; Gupta, S.K.S.; Schwiebert, L. Communication scheduling to minimize thermal effects of implanted biosensor networks in homogeneous tissue. IEEE Trans. Biomed. Eng. 2005, 52, 1285–1294. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Xiao, S.; Dhamdhere, A.; Sivaraman, V.; Burdett, A. Transmission Power Control in Body Area Sensor Networks for Healthcare Monitoring. IEEE J. Sel. Areas Commun. 2009, 27, 37–48. [Google Scholar] [CrossRef]
- Smith, D.B.; Lamahewa, T.; Hanlen, L.W.; Miniutti, D. Simple Prediction-Based Power Control for the On-Body Area Communications Channel. In Proceedings of the IEEE International Conference on Communications (ICC), Kyoto, Japan, 5–9 June 2011; pp. 1–5. [Google Scholar]
- Gao, W.; Jiao, B.; Yang, G.; Hu, W.; Liu, J. Transmission Power Control for IEEE 802.15.6 Body Area Networks. ETRI J. 2014, 36, 313–316. [Google Scholar] [CrossRef]
- Sodhro, A.H.; Li, Y.; Shah, M.A. Energy-efficient adaptive transmission power control for wireless body area networks. IET Commun. 2016, 10, 81–90. [Google Scholar] [CrossRef]
- Lee, W.; Lee, B.D.; Kim, N. Hybrid Transmission Power Control for Wireless Body Sensor Systems. Int. J. Distrib. Sens. Netw. 2014, 10. [Google Scholar] [CrossRef]
- Smith, D.B.; Hanlen, L.W.; Miniutti, D. Transmit power control for wireless body area networks using novel channel prediction. In Proceedings of the IEEE Wireless Communications and Networking Conference (WCNC), Shanghai, China, 1–4 April 2012; pp. 684–688. [Google Scholar]
- Franco, F.D.; Ge, Y.; Tinnirello, I. On-body and off-body transmit power control in IEEE 802.15.6 scheduled access networks. In Proceedings of the IEEE International Symposium on Personal, Indoor and Mobile Radio Communications (PIMRC), Washington, DC, USA, 2–5 September 2014; pp. 1254–1258. [Google Scholar]
- Di Franco, F.; Tachtatzis, C.; Atkinson, R.C.; Tinnirello, I.; Glover, I.A. Channel estimation and transmit power control in wireless body area networks. IET Wirel. Sens. Syst. 2014, 5, 11–19. [Google Scholar] [CrossRef] [Green Version]
- Archasantisuk, S.; Aoyagi, T.; Kim, M.; Takada, J.I. Transmission power control in WBAN using the context-specific temporal correlation model. In Proceedings of the IEEE International Symposium on Personal, Indoor and Mobile Radio Communications (PIMRC), Valencia, Spain, 4–8 September 2016; pp. 1–6. [Google Scholar]
- Kim, S.; Kim, S.; Eom, D.S. RSSI/LQI-Based Transmission Power Control for Body Area Networks in Healthcare Environment. IEEE J. Biomed. Health Inf. 2013, 17, 561–571. [Google Scholar] [CrossRef] [PubMed]
- Zou, L.; Liu, B.; Chen, C.; Chen, C.W. Bayesian game based power control scheme for inter-WBAN interference mitigation. In Proceedings of the IEEE Global Communications Conference (GLOBECOM), Austin, TX, USA, 8–12 December 2014; pp. 240–245. [Google Scholar]
- Yong, X.; Mengya, K.; Fen, L.; Qianming, Z. A self-adaptive Power control algorithm based on game theory for inter-WBAN interference mitigation. In Proceedings of the IEEE International Conference on Computer and Communications (ICCC), Chengdu, China, 14–17 October 2016; pp. 2873–2877. [Google Scholar]
- Wang, J.; Sun, Y.; Ji, Y. QoS-based adaptive power control scheme for co-located WBANs: A cooperative bargaining game theoretic perspective. Wirel. Netw. 2017, 24, 1–11. [Google Scholar] [CrossRef]
- Zhao, X.; Liu, B.; Chen, C.; Chen, C.W. QoS-Driven Power Control for Inter-WBAN Interference Mitigation. In Proceedings of the IEEE Global Communications Conference (GLOBECOM), San Diego, CA, USA, 6–10 December 2015; pp. 1–6. [Google Scholar]
- Quwaider, M.; Rao, J.; Biswas, S. Body-posture-based dynamic link power control in wearable sensor networks. IEEE Commun. Mag. 2010, 48, 134–142. [Google Scholar] [CrossRef]
- Zang, W.; Li, Y. Motion aware transmission power control scheme in wireless body area network. In Proceedings of the IEEE Workshop on Signal Processing Systems (SiPS), Hangzhou, China, 14–16 October 2015; pp. 1–5. [Google Scholar]
- Zang, W.; Zhang, S.; Li, Y. An Accelerometer-Assisted Transmission Power Control Solution for Energy-Efficient Communications in WBAN. IEEE J. Sel. Areas Commun. 2016, 34, 3427–3437. [Google Scholar] [CrossRef]
- Zang, W.; Li, Y. Gait Cycle Driven Transmission Power Control Scheme for Wireless Body Area Network. IEEE J. Biomed. Health Inf. 2017, 22, 697–706. [Google Scholar] [CrossRef] [PubMed]
- Li, Y.; Kong, L.; Wu, F.; Zheng, Z.; Chen, G. MAPM: Movement-Based Adaptive Prediction Mechanism for Energy Conservation in Body Sensor Networks. In Proceedings of the IEEE Global Communications Conference (GLOBECOM), Washington, DC, USA, 4–8 December 2016; pp. 1–6. [Google Scholar]
- Vallejo, M.; Piorno, J.R.; Rodrigo, J.L.A. A Link Quality Estimator for Power-Efficient Communication Over On-Body Channels. In Proceedings of the IEEE International Conference on Embedded and Ubiquitous Computing (EUC), Milano, Italy, 26–28 August 2014; pp. 250–257. [Google Scholar]
- Vallejo, M.; Recas, J.; Ayala, J.L. Proactive and Reactive Transmission Power Control for Energy-Efficient On-Body Communications. Sensors 2015, 15, 5914–5934. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Zhang, Y.; Zhang, B. A Relay-Aided Transmission Power Control Method in Wireless Body Area Networks. IEEE Access 2017, 5, 8408–8418. [Google Scholar] [CrossRef]
- Dong, J.; Smith, D. Joint relay selection and transmit power control for wireless body area networks coexistence. In Proceedings of the IEEE International Conference on Communications (ICC), Sydney, Australia, 10–14 June 2014; pp. 5676–5681. [Google Scholar]
- Zhou, Y.; Sheng, Z.; Mahapatra, C.; Leung, V.C.M.; Servati, P. Topology design and cross-layer optimization for wireless body sensor networks. Ad Hoc Netw. 2017, 59, 48–62. [Google Scholar] [CrossRef] [Green Version]
- Marinkovic, S.; Popovici, E. Network Coding for Efficient Error Recovery in Wireless Sensor Networks for Medical Applications. In Proceedings of the International Conference on Emerging Network Intelligence, Sliema, Malta, 11–16 October 2009; pp. 15–20. [Google Scholar]
- Taparugssanagorn, A.; Ono, F.; Kohno, R. Network coding for non-invasive wireless body area networks. In Proceedings of the IEEE International Symposium on Personal, Indoor and Mobile Radio Communications Workshops (PIMRC), Instanbul, Turkey, 26–30 September 2010; pp. 134–138. [Google Scholar]
- Byrne, E.; Manada, A. On coding schemes for wireless body area networks. In Proceedings of the International Symposium onCommunications and Information Technologies (ISCIT), Gold Coast, Australia, 2–5 October 2012; pp. 149–154. [Google Scholar]
- Yokota, K.; Mamada, A.; Morita, H. An XOR Encoding for Wireless Body Area Networks. In Proceedings of the International Conference on Body Area Networks (BodyNets), Boston, MA, USA, 30 September–2 October 2013; pp. 240–243. [Google Scholar]
- Razzaque, M.A.; Javadi, S.S.; Coulibaly, Y.; Hira, M.T. QoS-Aware Error Recovery in Wireless Body Sensor Networks Using Adaptive Network Coding. Sensors 2015, 15, 440–464. [Google Scholar] [CrossRef]
- Arrobo, G.E.; Gitlin, R.D. Improving the reliability of wireless body area networks. In Proceedings of the IEEE International Conference of the Engineering in Medicine and Biology Society (EMBC), Boston, MA, USA, 30 August–3 September 2011; pp. 2192–2195. [Google Scholar]
- Arrobo, G.E.; Gitlin, R.D. New approaches to reliable wireless body area networks. In Proceedings of the IEEE International Conference on Microwaves, Communications, Antennas and Electronic Systems (COMCAS), Tel Aviv, Israel, 7–9 November 2011; pp. 1–6. [Google Scholar]
- Kartsakli, E.; Antonopoulos, A.; Alonso, L.; Verikoukis, C. A cloud-assisted random linear network coding medium access control protocol for healthcare applications. Sensors 2014, 14, 4806–4830. [Google Scholar] [CrossRef] [Green Version]
- Arrobo, G.E.; Gitlin, R.D. Minimizing energy consumption for cooperative network and diversity coded sensor networks. In Proceedings of the Wireless Telecommunications Symposium, Washington, DC, USA, 9–11 April 2014; pp. 1–7. [Google Scholar]
- Kartsakli, E.; Antonopoulos, A.; Lalos, A.S.; Tennina, S.; Renzo, M.D.; Alonso, L.; Verikoukis, C. Reliable MAC design for ambient assisted living: moving the coordination to the cloud. IEEE Commun. Mag. 2015, 53, 78–86. [Google Scholar] [CrossRef]
- Haas, Z.J.; Chen, T.C. Cluster-based cooperative communication with network coding in wireless networks. In Proceedings of the IEEE Military Communications Conference (MILCOM), San Jose, CA, USA, 31 October–3 November 2010; pp. 2082–2089. [Google Scholar]
- Zhang, H.; Safaei, F.; Tran, L.C. A Novel Cooperation-Based Network Coding Scheme for Walking Scenarios in WBANs. Wirel. Commun. Mob. Comput. 2017, 2017, 6267579. [Google Scholar] [CrossRef]
- Zhang, H.; Safaei, F.; Tran, L.C. Autocorrelation Based Transmission Power Control in WBANs. In Proceedings of the Accepted by 12th International Symposium on Medical Information and Communication Technology (ISMICT), Ultimo, Australia, 29 January 2018. [Google Scholar]
- Zhang, H.; Safaei, F.; Tran, L.C. Measurement-Based Characterizations of On-Body Channel in the Human Walking Scenario. In Proceedings of the IEEE Vehicular Technology Conference (VTC2017-Spring), Sydney, Australia, 4–7 June 2017; pp. 1–5. [Google Scholar]
- Fort, A.; Ryckaert, J.; Desset, C.; Doncker, P.D.; Wambacq, P.; Biesen, L.V. Ultra-wideband channel model for communication around the human body. IEEE J. Sel. Areas Commun. 2006, 24, 927–933. [Google Scholar] [CrossRef]
- Smith, D.; Miniutti, D.; Hanlen, L.; Zhang, A.; Lewis, D.; Rodda, D.; Gilbert, B. Power Delay Profiles for Dynamic Narrowband Body Area Network Channels; IEEE: Piscataway, NJ, USA, 2009. [Google Scholar]
- Zhang, H.; Safaei, F.; Tran, L.C. Joint analog network coding and channel allocation in the walking scenario for WBAN. In Proceedings of the IEEE Symposium on Computers and Communication (ISCC), Messina, Italy, 27–30 June 2016; pp. 604–609. [Google Scholar]
- Hanlen, L.; Chaganti, V.; Gilbert, B.; Rodda, D.; Lamahewa, T.; Smith, D.B. Open-source testbed for Body Area Networks: 200 sample/sec, 12 hrs continuous measurement. In Proceedings of the IEEE International Symposium on Personal, Indoor and Mobile Radio Communications Workshops (PIMRC), Instanbul, Turkey, 26–30 September 2010; pp. 66–71. [Google Scholar]
- Lauzier, M.; Ferrand, P.; Fraboulet, A.; Parvery, H.; Gorce, J.M. Full mesh channel measurements on Body Area Networks under walking scenarios. In Proceedings of the European Conference on Antennas and Propagation (EuCAP), Gothenburg, Sweden, 8–12 April 2013; pp. 3508–3512. [Google Scholar]
- Li, C.; Yuan, X.; Yang, L.; Song, Y. A Hybrid Lifetime Extended Directional Approach for WBANs. Sensors 2015, 15, 28005–28030. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Omeni, O.; Wong, A.C.W.; Burdett, A.J.; Toumazou, C. Energy Efficient Medium Access Protocol for Wireless Medical Body Area Sensor Networks. IEEE Trans. Biomed. Circuits Syst. 2008, 2, 251–259. [Google Scholar] [CrossRef] [PubMed]
- Sudjai, M.; Tran, L.C.; Safaei, F. On The Energy Efficiency of Adaptive WBAN Systems for mHealth Services. EAI Endors. Trans. Pervasive Health Technol. 2017, 3, 1–12. [Google Scholar] [CrossRef]
- Le, N.P.; Tran, L.C.; Safaei, F. Energy-efficiency analysis of per-subcarrier antenna selection with peak-power reduction in MIMO-OFDM wireless systems. Int. J. Antennas Propag. 2014, 2014, 1–12. [Google Scholar] [CrossRef]
- Le, N.P.; Tran, L.C.; Safaei, F.; Varma, V.S. Energy Efficiency Analysis of Antenna Selection MIMO ARQ Systems over Nakagami-m Fading Channels. IET Commun. 2015, 9, 1522–1530. [Google Scholar] [CrossRef]
- Tran, L.C.; Mertins, A. Error performance and energy efficiency analyses of fully cooperative OFDM communication in frequency selective fading. IET Commun. 2016, 10, 2525–2533. [Google Scholar] [CrossRef]
- Tran, L.C.; Mertins, A.; Huang, X.; Safaei, F. Comprehensive Performance Analysis of Fully Cooperative Communication in WBANs. IEEE Access 2016, 4, 8737–8756. [Google Scholar] [CrossRef]
- Athanassios Boulis. Castalia: A Simulator for Wireless Sensor Networks and Body Area Networks. Available online: https://github.com/boulis/Castalia/ (accessed on 30 September 2018).
- Texas Instuments. 2.4 GHz IEEE 802.15.4/Zigbee-Ready RF Transceiver. Available online: http://www.ti.com/lit/ds/symlink/cc2420.pdf (accessed on 30 September 2018).
- D’Errico, R.; Ouvry, L. Time-variant BAN channel characterization. In Proceedings of the IEEE International Symposium on Personal, Indoor and Mobile Radio Communications (PIMRC), Tokyo, Japan, 13–16 September 2009; pp. 3000–3004. [Google Scholar]
- Fort, A.; Desset, C.; Wambacq, P.; Biesen, L.V. Indoor body-area channel model for narrowband communications. IET Microw. Antennas Propag. 2007, 1, 1197–1203. [Google Scholar] [CrossRef]
- Chaganti, V.G.; Smith, D.B.; Hanlen, L.W. Second-Order Statistics for Many-Link Body Area Networks. IEEE Antennas Wirel. Propag. Lett. 2010, 9, 322–325. [Google Scholar] [CrossRef]
- Chaganti, V.; Hanlen, L.; Smith, D. Are Narrowband Wireless On-Body Networks Wide-Sense Stationary? IEEE Trans. Wirel. Commun. 2014, 13, 2432–2442. [Google Scholar]
- Sundararajan, J.K.; Shah, D.; Médard, M.; Mitzenmacher, M.; Barros, J. Network Coding Meets TCP. In Proceedings of the IEEE International Conference on Computer Communications (INFOCOM), Rio de Janeiro, Brazil, 19–25 April 2009; pp. 280–288. [Google Scholar]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| State | Tx Power (dBm) | Current Consumption (mA) | Working Power (mW) |
|---|---|---|---|
| Rx | - | 18.8 | 62 |
| Sleep | - | 0.42 | 1.4 |
| Tx | 0 | 17.4 | 57.42 |
| −1 | 16.7 | 55.18 | |
| −3 | 15.3 | 50.69 | |
| −5 | 14 | 46.2 | |
| −7 | 12.8 | 42.24 | |
| −10 | 11 | 36.3 | |
| −15 | 9.9 | 32.67 | |
| −25 | 8.5 | 29.04 |
| From | To | Consumed Power (mW) | Delay (ms) |
|---|---|---|---|
| Sleep | Rx | 62 | 0.194 |
| Sleep | Tx | 62 | 0.194 |
| Rx | Sleep | 1.4 | 0.05 |
| Rx | Tx | 62 | 0.01 |
| Tx | Sleep | 1.4 | 0.05 |
| Tx | Rx | 62 | 0.01 |
| Parameter | Value |
|---|---|
| Application Layer | |
| PacketSize | 105 bytes |
| PacketRate | 25 Pkts/s |
| Routing Layer | |
| PacketOverhead | 10 bytes |
| MAC Layer | |
| SuperframeLength | 80 ms |
| SlotLength | 5 ms |
| RAP1Length | 10 ms |
| DTPLength | 50 ms |
| RTPLength | 20 ms |
| SUI | 10 ms |
| pTIFS | 0.03 ms |
| Data’s AckType | N-Ack |
| Control’s AckType | I-Ack |
| PacketOverheader | 7 bytes |
| Radio Layer | |
| DataRate | 250 kbps |
| ModulationType | PSK |
| Bandwidth | 20 MHz |
| CarrierFreq | 2400.0 MHz |
| NoiseFloor | −101 dBm |
| Rx_sensitivity | −89 dBm |
| CCAthreshold | −95 dBm |
| SymbolsForRSSI | 8 bits |
| InitialTxPower | 0 dBm |
| FrameOverheader | 6 bytes |
| others | |
| SensorNumber | 5 |
| sensor’s initialEnergy | 2430 J |
| Wireless Channel | TraceChannel |
| PLR_r | 0.02 |
| SimulationTime | 3600 s |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, H.; Safaei, F.; Tran, L.C. Joint Transmission Power Control and Relay Cooperation for WBAN Systems. Sensors 2018, 18, 4283. https://doi.org/10.3390/s18124283
Zhang H, Safaei F, Tran LC. Joint Transmission Power Control and Relay Cooperation for WBAN Systems. Sensors. 2018; 18(12):4283. https://doi.org/10.3390/s18124283
Chicago/Turabian StyleZhang, Hongyun, Farzad Safaei, and Le Chung Tran. 2018. "Joint Transmission Power Control and Relay Cooperation for WBAN Systems" Sensors 18, no. 12: 4283. https://doi.org/10.3390/s18124283
APA StyleZhang, H., Safaei, F., & Tran, L. C. (2018). Joint Transmission Power Control and Relay Cooperation for WBAN Systems. Sensors, 18(12), 4283. https://doi.org/10.3390/s18124283