Investigation on Perceptron Learning for Water Region Estimation Using Large-Scale Multispectral Images


Abstract
:1. Introduction
2. Materials and Methods
2.1. Data Preparation
2.2. Perceptron Learning
2.2.1. The Rectified Linear Unit (ReLU) Activation Function
2.2.2. Softmax and Cross-entropy as the Loss Function
2.2.3. Stochastic Gradient Descent (SGD) as the Optimizer
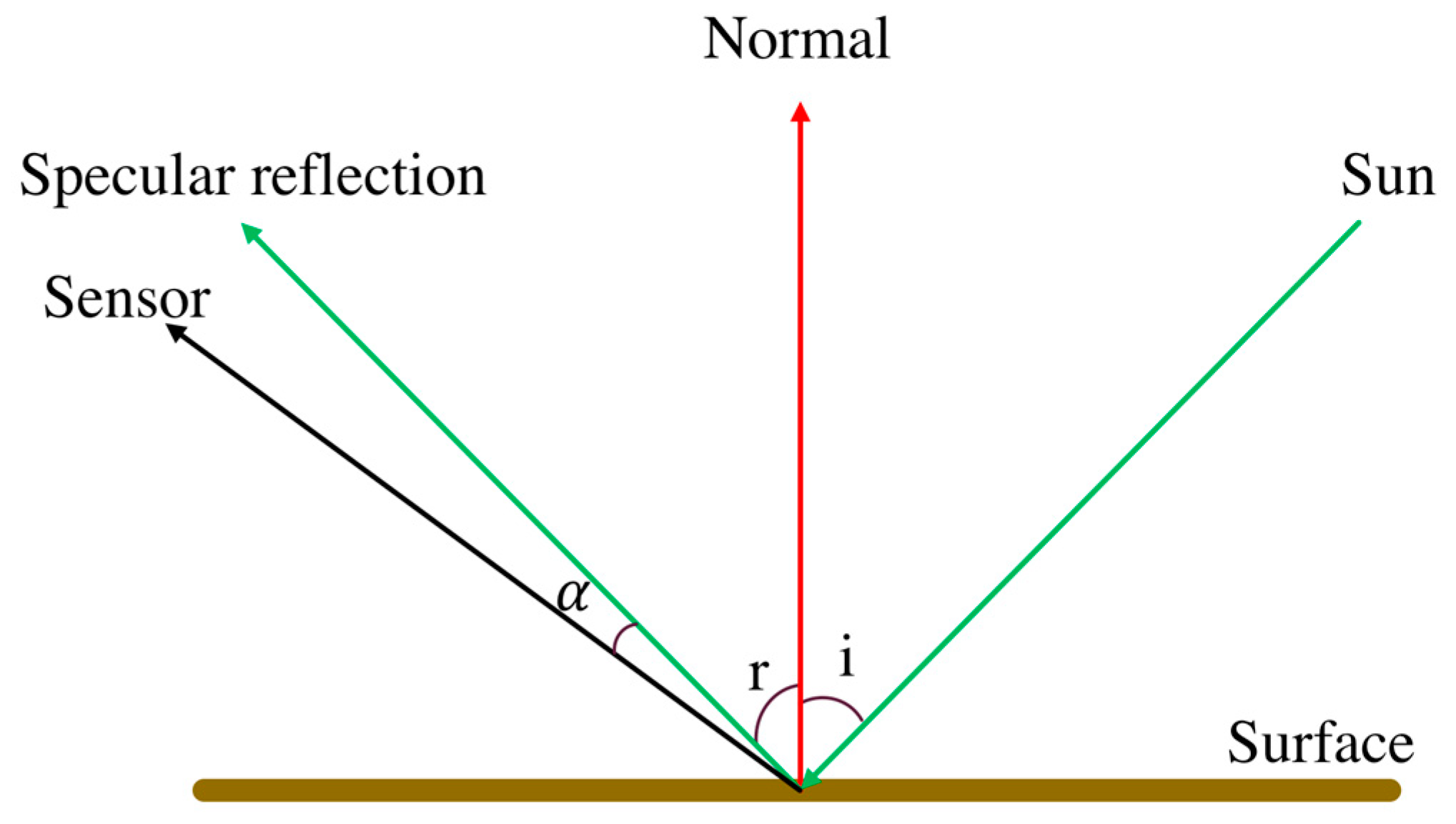
2.3. Algorithm to Reduce Sunglint-derived FNs
2.4. Algorithm to Distinguish Snow/Ice from Water Regions
3. Results and Discussion
3.1. Five-fold Cross Model Training
3.2. Comparison with Other State-of-the-Art Methods
Processing Time and Resource Comparison between PDWF and U-net
3.3. Improved Water/Non-Water Region Estimation after Sunglint and Snow/Ice Correction
3.4. Performance Evaluation in Detecting Smaller Water and Non-water Features
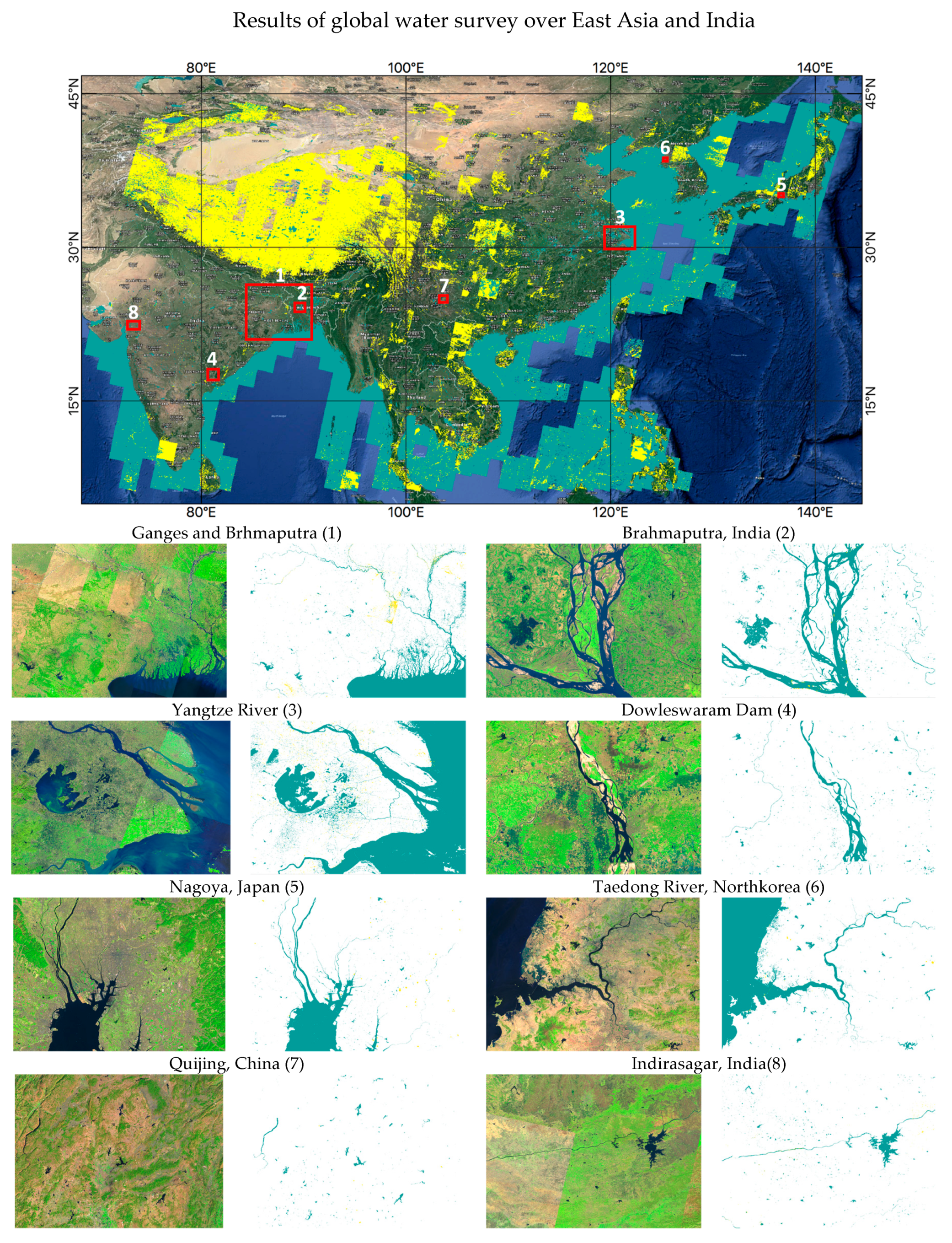
3.5. Preliminary Results of Global Water Survey
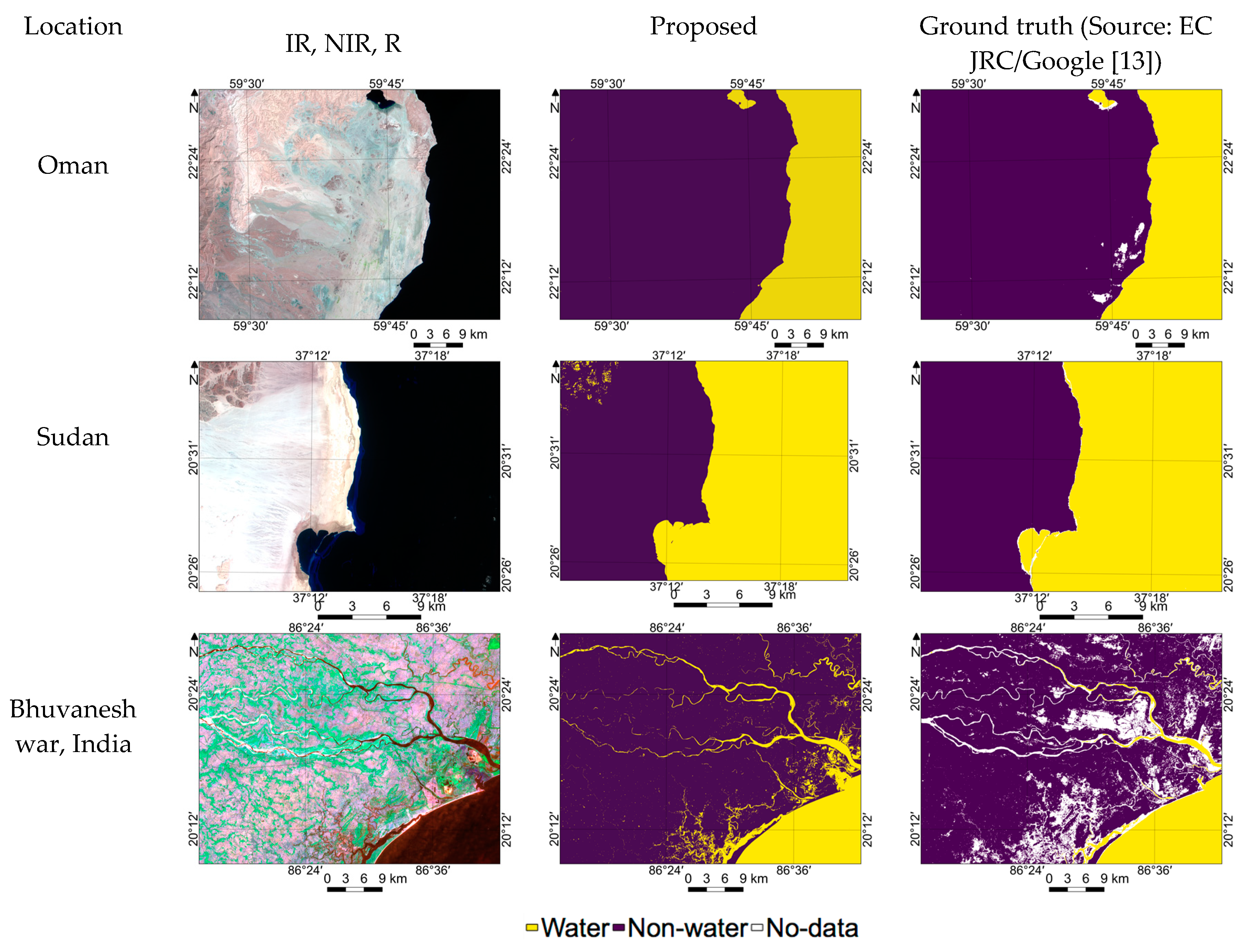
3.6. Performance Evaluation of the Proposed Method for Sentinel-2 Images
4. Conclusions
Author Contributions
Acknowledgments
Conflicts of Interest
Appendix A
Appendix B







References
- Casado, M.R.; Gonzalez, R.B.; Kriechbaumer, T.; Veal, A. Automated Identification of River Hydromorphological Features Using UAV High Resolution Aerial Imagery. Sensors 2006, 15, 27969–27989. [Google Scholar] [CrossRef] [PubMed]
- Aedlaa, R.; Dwarakish, G.S.; Venkat Reddy, C. Automatic Shoreline Detection and Change Detection Analysis of Netravati-Gurpur Rivermouth Using Histogram Equalization and Adaptive Thresholding Techniques. Aquat. Procedia 2015, 4, 563–570. [Google Scholar] [CrossRef]
- Feng, M.; Sexton, J.O.; Channan, S.; Townshend, J.R. A global, high-resolution (30-m) inland water body dataset for 2000: First results of a topographic-spectral classification algorithm. Int. J. Digit. Earth 2015, 9, 113–133. [Google Scholar] [CrossRef]
- Shen, L.; Li, C. Water body extraction from Landsat ETM+ imagery using adaboost algorithm. In Proceedings of the 2010 18th International Conference on Geoinformatics, Beijing, China, 18–20 June 2010. [Google Scholar]
- Klein, I.; Dietz, A.; Gessner, U.; Dech, S.; Kuenzer, C. Results of the Global WaterPack: A novel product to assess inland water body dynamics on a daily basis. Remote Sens. Lett. 2015, 6, 78–87. [Google Scholar] [CrossRef]
- Storey, J.; Choate, M.; Lee, M.K. Landsat 8 Operational Land Imager On-Orbit Geometric Calibration and Performance. Remote Sens. 2014, 6, 11127–11152. [Google Scholar] [CrossRef] [Green Version]
- Yepezab, S.; Laraquea, A.; Martinez, J.M. Retrieval of suspended sediment concentrations using Landsat-8 OLI satellite images in the Orinoco River (Venezuela). Comptes Rendus Geosci. 2018, 350, 20–30. [Google Scholar] [CrossRef]
- Lyzenga, D.R.; Malinas, N.R.; Tanis, F.J. Multispectral bathymetry using a simple physically based algorithm. IEEE Trans. Geosci. Remote Sens. 2006, 44, 2251–2259. [Google Scholar] [CrossRef]
- Rokni, K.; Ahmad, A.; Hazini, S. Water Feature Extraction and Change Detection Using Multitemporal Landsat Imagery. Remote Sens. 2014, 6, 4173–4189. [Google Scholar] [CrossRef] [Green Version]
- Acharya, T.D.; Yang, I.T.; Lee, D.H. Application of J48 Decision Tree for the Identification of Water Bodies Using Landsat 8 OLI Imagery. Remote Sens. 2009, 1, 697–730. [Google Scholar]
- Nath, R.K.; Deb, S.K. Water-body area extraction from high resolution satellite images—An introduction, review, and comparison. Int. J. Image Process. 2010, 3, 353–372. [Google Scholar]
- Sethre, P.R.; Rundquist, B.C.; Todhunter, P.E. Remote detection of prairie pothole ponds in the Devils Lake Basin, North Dakota. GISci. Remote Sens. 2005, 42, 277–296. [Google Scholar] [CrossRef]
- Pekel, J.F.; Cottam, A.; Gorelick, A.; Belward, S. High-resolution mapping of global surface water and its long-term changes. Nature 2016, 540, 418–422. [Google Scholar] [CrossRef] [PubMed]
- Feyisa, G.L.; Meilby, H.; Fensholt, R. Automated Water Extraction Index: A new technique for surface water mapping using Landsat imagery. Remote Sens. Environ. 2014, 140, 23–35. [Google Scholar] [CrossRef]
- Mueller, N.; Lewis, A.; Roberts, D. Water observations from space: Mapping surface water from 25 years of Landsat imagery across Australia. Remote Sens. Environ. 2016, 174, 341–352. [Google Scholar] [CrossRef]
- Jiang, Z.; Qi, J.; Su, S.; Zhang, Z.; Wu, J. Water body delineation using index composition and HIS transformation. Int. J. Remote Sens. 2012, 33, 3402–3421. [Google Scholar] [CrossRef]
- Sheng, Y.W.; Shah, C.A.; Smith, L.C. Automated image registration for hydrologic change detection in the lake-rich Arctic. IEEE Geosci. Remote Sens. Lett. 2008, 5, 414–418. [Google Scholar] [CrossRef]
- Sun, F.; Sun, W.; Chen, J.; Gong, P. Comparison and improvement of methods for identifying waterbodies in remotely sensed imagery. Int. J. Remote Sens. 2012, 33, 6854–6875. [Google Scholar] [CrossRef]
- Verpoorter, C.; Kutser, T.; Tranvik, L. Automated mapping of water bodies using Landsat multispectral data. Limnol. Oceanogr. Methods 2012, 10, 1037–1050. [Google Scholar] [CrossRef] [Green Version]
- Yamazaki, D.; Trigg, A.; Ikeshima, D. Development of a global 90 m water body map using multi-temporal Landsat images. Remote Sens. Environ. 2015, 171, 337–351. [Google Scholar] [CrossRef]
- McFeeters, S.K. The use of the normalized difference water index (NDWI) in the delineation of open water features. Int. J. Remote Sens. 1996, 17, 1425–1432. [Google Scholar] [CrossRef]
- Xu, H. Modification of normalized difference water index (NDWI) to enhance open water features in remotely sensed imagery. Int. J. Remote Sens. 2006, 27, 3025–3033. [Google Scholar] [CrossRef]
- Work, E.A.; Gilmer, D.S. Utilization of satellite data for inventorying prairie ponds and lakes. Photogramm. Eng. Remote Sens. 1976, 42, 685–694. [Google Scholar]
- Rundquist, D.C.; Lawson, M.P.; Queen, L.P.; Cerveny, R.S. The relationship between summer season rainfall events and lake-surface area. J. Am. Water Resour. Assoc. 1987, 23, 493–508. [Google Scholar] [CrossRef]
- Vinayaraj, P.; Oishi, Y.; Nakamura, R. Development of an automatic dynamic global water mask using landsat-8 images. In Proceedings of the IGARSS International Geoscience and Remote Sensing Symposium, Valencia, Spain, 22–27 July 2018. [Google Scholar]
- Tadono, T.; Ishida, H.; Oda, F.; Naito, S.; Minakawa, K.; Iwamoto, H. Precise global DEM generation by ALOS PRISM. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2014, 4, 71–76. [Google Scholar] [CrossRef]
- Luc, B.; Bruno, S.; Davy, W. Dynamic Water Surface Detection Algorithm Applied on PROBA-V Multispectral Data. Remote Sens. 2016, 8, 1010. [Google Scholar] [CrossRef]
- Chen, Y.; Jiang, H.; Li, C.; Jia, X.; Ghamisi, P. Deep feature extraction and classification of hyperspectral images based on convolutional neural networks. IEEE Trans. Geosci. Remote Sens. 2016, 54, 6232–6251. [Google Scholar] [CrossRef]
- Chen, Y.; Lin, Z.; Zhao, X.; Wang, G.; Gu, Y. Learning spatiotemporal features with 3D convolutional networks. IEEE J. Select. Top. Appl. Earth Observ. Remote Sens. 2014, 7, 2094–2107. [Google Scholar] [CrossRef]
- Zhao, W.; Du, S. Spectral-spatial feature extraction for hyperspectral image classification: A dimension reduction and deep learning approach. IEEE Trans. Geosci. Remote Sens. 2016, 54, 4544–4554. [Google Scholar] [CrossRef]
- Tran, D.; Bourdev, L.; Fergus, R.; Torresani, L.; Paluri, M. Learning spatiotemporal features with 3D convolutional networks. In Proceedings of the IEEE International Conference on Computer Vision (ICCV), Santiago, Chile, 13–16 December 2015; pp. 4489–4497. [Google Scholar]
- Olaf, R.; Philipp, F.; Thomas, B. U-Net: Convolutional Networks for Biomedical Image Segmentation. In Proceedings of the International Conference on Medical Image Computing and Computer-Assisted Intervention (MICCAI), Munich, Germany, 5–9 October 2015; pp. 234–241. [Google Scholar]
- Using the USGS Landsat-8 level-1 Data Product. Available online: https://landsat.usgs.gov/using-usgs-landsat-8-product (accessed on 18 November 2018).
- Neteler, M.; Bowman, H.; Landa, M.; Metz, M. GRASS GIS: A multi-purpose open source GIS. Environ. Model. Softw. 2012, 31, 124–130. [Google Scholar] [CrossRef] [Green Version]
- Vinayaraj, P.; Raghavan, V.; Matsumoto, S. Satellite-derived bathymetry using adaptive geographically weighted regression model. Mar. Geod. 2016, 39, 458–478. [Google Scholar] [CrossRef]
- Simon, H. Neural Networks: A Comprehensive Foundation; Prentice Hall PTR: Upper Saddle River, NJ, USA, 1998. [Google Scholar]
- Sun, Y.; Wang, X.; Tang, X. Deeply learned face representations are sparse, selective, and robust. arXiv, 2014; arXiv:1412.1265. [Google Scholar]
- Chainer Function ReLu. Available online: https://docs.chainer.org/en/stable/reference/generated/chainer.functions.relu.html (accessed on 20 November 2018).
- Katarzyna, J.; Wojciech, M.C. On Loss Functions for Deep Neural Networks in Classification. arXiv, 2017; arXiv:1702.05659v1. [Google Scholar]
- Chainer Functionss Softmax. Available online: https://docs.chainer.org/en/stable/reference/generated/chainer.functions.softmax.html (accessed on 20 November 2018).
- Chainer Functions Softmax_Cross_Entropy. Available online: https://docs.chainer.org/en/stable/reference/generated/chainer.functions.softmax_cross_entropy.html (accessed on 20 November 2018).
- Kiefer, J.; Wolfowitz, J. Stochastic Estimation of the Maximum of a Regression Function. Ann. Math. Stat. 1952, 159, 462–466. [Google Scholar] [CrossRef]
- Optimization: Stochastic Gradient Descent. Available online: http://deeplearning.stanford.edu/tutorial/supervised/OptimizationStochasticGradientDescent/ (accessed on 20 November 2018).
- Kay, S. Sun Glint Correction of High and Low Spatial Resolution Images of Aquatic Scenes: A Review of Methods for Visible and Near-Infrared Wavelengths. Remote Sens. 2009, 1, 697–730. [Google Scholar] [CrossRef]
- Christopher, R.; Jackson Werner, A. The role of the critical angle in brightness reversals on sunglint images of the sea surface. J. Geophys. Res. 2010, 115, C09019. [Google Scholar] [CrossRef]
- Cox, C.; Munk, W. Measurement of the roughness of the sea surface from photographs of the sun’s glitter. J. Opt. Soc. Am. 1954, 44, 838–850. [Google Scholar] [CrossRef]
- Su, W.; Charlock, T.P.; Rutled, K. Observations of reflectance distribution around sunglint from a coastal ocean platform. J. Opt. Soc. Am. 2002, 41, 7369–7383. [Google Scholar] [CrossRef]
- Landsat 8 Data Users Handbook—Section 2. Available online: https://landsat.usgs.gov/landsat-8-l8-data- users-handbook-section-2 (accessed on 18 November 2018).
- Ishida, H.; Nakajima, T.Y. Development of an unbiased cloud detection algorithm for a spaceborne multispectral imager. J. Geophys. Res. 2009, 114, D07206. [Google Scholar] [CrossRef]
- Zhu, Z.; Woodcock, C.E. Object-based cloud and cloud shadow detection in Landsat imagery. Remote Sens. Environ. 2012, 118, 83–94. [Google Scholar] [CrossRef]
- Zhu, Z.; Wang, S.; Woodcoc, C.E. Improvement and expansion of the Fmask algorithm: Cloud, cloud shadow, and snow detection for Landsats 4-7, 8, and Sentinel 2 images. Remote Sens. Environ. 2015, 159, 269–277. [Google Scholar] [CrossRef]
- Tokui, S.; Oono, K. Chainer: A Next-Generation Open Source Framework for Deep Learning. In Proceedings of the Workshop on Machine Learning Systems (LearningSys) in the Twenty-Ninth Annual Conference on Neural Information Processing Systems (NIPS), Montreal, QC, Canada, 7–12 December 2015. [Google Scholar]
- Noh, H.; Hong, S.; Han, B. Learning Deconvolution Network for Semantic Segmentation. arXiv, 2015; arXiv:1505.04366. [Google Scholar]
- AIST Artificial Intelligence Cloud (AAIC). Available online: https://www.airc.aist.go.jp/en/info_details/computer-resources.html (accessed on 10 September 2018).
- Land Browser. Available online: https://landbrowser.airc.aist.go.jp/landbrowser/ (accessed on 10 September 2018).
- Pahlevan, N.; Sarkar, S.; Franz, A.; Balasu Balasubramanian, S.V. Sentinel-2 MultiSpectral Instrument (MSI) data processing for aquatic science applications: Demonstrations and validations. Remote Sens. Environ. 2017, 201, 47–56. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Usage | Location | Date |
|---|---|---|
| Training and validation | Gulf of California, Mexico | 2017-01-22 |
| Red Sea, Saudi Arabia | 2015-11-01 | |
| Numbulwar, Australia | 2017-08-08 | |
| Christchurch, New Zealand | 2015-10-10 | |
| Mansel island, Canada | 2016-08-13 | |
| Abu Dhabi, UAE | 2017-11-25 | |
| Surat, India | 2017-11-14 | |
| Hanover, Germany | 2017-03-28 | |
| Yancheng, Chaina | 2016-02-18 | |
| East Siberian sea, Russia | 2015-09-05 | |
| Rio de Janeiro, Brazil | 2017-09-14 | |
| Yenisei river, Russia | 2017-07-21 | |
| Nitchequon, Canada | 2016-09-27 | |
| Chita, Russia | 2017-09-11 | |
| Hong Kong | 2016-02-07 | |
| Test images with clear observation | Lake Malawi, Africa | 2016-06-16 |
| Great barrier reef, Australia | 2016-08-14 | |
| Chilika lake, India | 2017-02-07 | |
| Chiba, Japan | 2017-03-20 | |
| Lake Victoria, Africa | 2016-08-17 | |
| Test images with sunglint and snow/ice | Gulf of California, Mexico | 2017-08-02 |
| Red Sea, Saudi Arabia | 2017-05-14 | |
| Yamamoto, Japan | 2015-05-02 |
| Folds | Training Accuracy | Validation Accuracy | Testing Accuracy | Overall Accuracy | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Feature (Pretrained) | Feature (Random) | Bands (Random) | Feature (Pretrained) | Feature (Random) | Bands (Random) | Feature (Pretrained) | Feature (Random) | Bands (Random) | Feature (Pretrained) | Feature (Random) | Bands (Random) | |
| 1 | 0.993 | 0.549 | 0.548 | 0.997 | 0.734 | 0.661 | 0.997 | 0.717 | 0.716 | 0.996 | 0.666 | 0.642 |
| 2 | 0.995 | 0.572 | 0.540 | 0.990 | 0.658 | 0.707 | 0.997 | 0.718 | 0.716 | 0.994 | 0.649 | 0.654 |
| 3 | 0.997 | 0.593 | 0.589 | 0.994 | 0.580 | 0.580 | 0.999 | 0.703 | 0.874 | 0.997 | 0.625 | 0.685 |
| 4 | 0.993 | 0.556 | 0.992 | 0.996: | 0.709 | 0.993 | 0.996 | 0.717 | 0.998 | 0.994 | 0.661 | 0.994 |
| 5 | 0.984 | 0.996 | 0.572 | 0.987 | 0.995 | 0.661 | 0.987 | 0.998 | 0.715 | 0.986 | 0.996 | 0.649 |
| Location | Method | FPs + FNs | Commission Error | Omission Error | Accuracy |
|---|---|---|---|---|---|
| Lake Malawi | AWEI (Feyisa et al. [14]) | 29,391 | 0.0001 | 0.0022 | 0.9992 |
| MNDWI (Xu et al. [22]) | 59,668 | 0.0037 | 0.0008 | 0.9985 | |
| U-net (Olaf et al. [33]) | 8937 | 0.0001 | 0.0012 | 0.9997 | |
| PDWF | 23,327 | 0.0001 | 0.0016 | 0.9994 | |
| Great Barrier Reef | AWEI (Feyisa et al. [14]) | 491,210 | 0.0013 | 0.0557 | 0.9853 |
| MNDWI (Xu et al. [22]) | 356,618 | 0.0382 | 0.0001 | 0.9895 | |
| U-net (Olaf et al. [33]) | 16,032 | 0.0003 | 0.0003 | 0.9995 | |
| PDWF | 16,219 | 0.0015 | 0.0002 | 0.9995 | |
| Chilika Lake | AWEI (Feyisa et al. [14]) | 31,180 | 0.0041 | 0.0030 | 0.9991 |
| MNDWI (Xu et al. [22]) | 322,692 | 0.0648 | 0.0016 | 0.9917 | |
| U-net (Olaf et al. [33]) | 42,869 | 0.0056 | 0.0039 | 0.9989 | |
| PDWF | 29,565 | 0.0033 | 0.0031 | 0.9992 | |
| Chiba | AWEI (Feyisa et al. [14]) | 413,482 | 0.0018 | 0.0441 | 0.9843 |
| MNDWI (Xu et al. [22]) | 1,199,664 | 0.1123 | 0.0001 | 0.9556 | |
| U-net (Olaf et al. [33]) | 48,028 | 0.0032 | 0.0009 | 0.9982 | |
| PDWF | 29,685 | 0.0021 | 0.0009 | 0.9989 | |
| Lake Victoria | AWEI (Feyisa et al. [14]) | 12,814 | 0.0004 | 0.0003 | 0.9996 |
| MNDWI (Xu et al. [22]) | 26,905 | 0.0017 | 0.0001 | 0.9993 | |
| U-net (Olaf et al. [33]) | 37,541 | 0.0032 | 0.0002 | 0.9990 | |
| PDWF | 10,982 | 0.0004 | 0.0002 | 0.9997 | |
| Average | AWEI (Feyisa et al. [14]) | 195,615 | 0.0015 | 0.0210 | 0.9935 |
| MNDWI (Xu et al. [22]) | 393,109 | 0.0441 | 0.0005 | 0.9869 | |
| U-net (Olaf et al. [33]) | 30,681 | 0.0025 | 0.0013 | 0.9991 | |
| PDWF | 21,955 | 0.0015 | 0.0012 | 0.9993 |
| Location | Method | FPs + FNs | Commission Error | Omission Error | Accuracy |
|---|---|---|---|---|---|
| Red Sea (sunglint) | AWEI (Feyisa et al. [14]) | 9,424,695 | 0.0035 | 0.8271 | 0.7651 |
| MNDWI (Xu et al. [22]) | 176,670 | 0.0148 | 0.0001 | 0.9956 | |
| U-net (Olaf et al. [33]) | 396,929 | 0.0106 | 0.0028 | 0.9903 | |
| Proposed | 717,487 | 0.0001 | 0.0614 | 0.9823 | |
| Gulf of California (sunglint) | AWEI (Feyisa et al. [14]) | 13,181,792 | 0.0006 | 0.4765 | 0.7602 |
| MNDWI (Xu et al. [22]) | 86,539 | 0.0030 | 0.0001 | 0.9977 | |
| U-net (Olaf et al. [32]) | 3,525,161 | 0.2190 | 0.0415 | 0.9114 | |
| Proposed | 3,267,434 | 0.0003 | 0.1163 | 0.9167 | |
| Yamamoto | AWEI (Feyisa et al. [14]) | 4,467,484 | 0.4754 | 0.3363 | 0.8677 |
| MNDWI (Xu et al. [22]) | 3,303,202 | 0.3613 | 0.0003 | 0.9026 | |
| U-net (Olaf et al. [32]) | 105,065 | 0.0035 | 0.0001 | 0.9969 | |
| Proposed | 269,177 | 0.0374 | 0.0074 | 0.9920 | |
| Average | AWEI (Feyisa et al. [14]) | 9,024,657 | 0.1598 | 0.5466 | 0.7977 |
| MNDWI (Xu et al. [22]) | 1,188,803 | 0.1264 | 0.0001 | 0.9653 | |
| U-net (Olaf et al. [32]) | 1,342,385 | 0.0777 | 0.0148 | 0.9662 | |
| Proposed | 1,418,032 | 0.0126 | 0.0617 | 0.9637 |
| Methods | Number of Parameters | Time with only CPU | Time with GPU | ||||
|---|---|---|---|---|---|---|---|
| Create Patches (128) | Prediction | Back to Original Shape | Create Patches (128) | Prediction | Back to Original Shape | ||
| U-net (Olaf et al. [32]) | 7,766,915 | 8.35 | 1300.52 | 27.50 | 3.45 | 47.45 | 10.34 |
| PDWF | 12 | N/A | 2.66 | N/A | N/A | 0.06 | N/A |
| Location | Correction | FPs + FNs | Commission Error | Omission Error | Accuracy |
|---|---|---|---|---|---|
| Gulf of California | Before sunglint correction | 3,267,434 | 0.0003 | 0.1163 | 0.9167 |
| After sunglint correction | 21,697 | 0.0007 | 0.0001 | 0.9994 | |
| After snow/ice correction | 21,697 | 0.0007 | 0.0001 | 0.9994 | |
| Red Sea | Before sunglint correction | 717,487 | 0.0001 | 0.0614 | 0.9823 |
| After sunglint correction | 51,981 | 0.0039 | 0.0004 | 0.9987 | |
| After snow/ice correction | 51,981 | 0.0039 | 0.0004 | 0.9987 | |
| Yamamoto | Before sunglint correction | 269,177 | 0.0374 | 0.0074 | 0.9920 |
| After sunglint correction | 268,633 | 0.0428 | 0.0013 | 0.9921 | |
| After snow/ice correction | 62,666 | 0.0092 | 0.0014 | 0.9981 | |
| Average | Before sunglint correction | 1,418,032 | 0.0126 | 0.0617 | 0.9637 |
| After sunglint correction | 114,103 | 0.0158 | 0.0006 | 0.9967 | |
| After snow/ice correction | 45,448 | 0.0046 | 0.0006 | 0.9988 |
| Location | Date | FPs + FNs | Commission Error | Omission Error | Accuracy |
|---|---|---|---|---|---|
| Oman | 2018-09-20 | 442,194 | 0.0116 | 0.0001 | 0.9963 |
| Sudan | 2018-09-27 | 670,097 | 0.0073 | 0.0004 | 0.9931 |
| Bhuvaneshwar | 2018-01-05 | 606,218 | 0.0159 | 0.0016 | 0.9928 |
| Average | 572,836 | 0.0116 | 0.0007 | 0.9940 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Vinayaraj, P.; Imamoglu, N.; Nakamura, R.; Oda, A. Investigation on Perceptron Learning for Water Region Estimation Using Large-Scale Multispectral Images. Sensors 2018, 18, 4333. https://doi.org/10.3390/s18124333
Vinayaraj P, Imamoglu N, Nakamura R, Oda A. Investigation on Perceptron Learning for Water Region Estimation Using Large-Scale Multispectral Images. Sensors. 2018; 18(12):4333. https://doi.org/10.3390/s18124333
Chicago/Turabian StyleVinayaraj, Poliyapram, Nevrez Imamoglu, Ryosuke Nakamura, and Atsushi Oda. 2018. "Investigation on Perceptron Learning for Water Region Estimation Using Large-Scale Multispectral Images" Sensors 18, no. 12: 4333. https://doi.org/10.3390/s18124333
APA StyleVinayaraj, P., Imamoglu, N., Nakamura, R., & Oda, A. (2018). Investigation on Perceptron Learning for Water Region Estimation Using Large-Scale Multispectral Images. Sensors, 18(12), 4333. https://doi.org/10.3390/s18124333