Transformerless Ultrasonic Ranging System with the Feature of Intrinsic Safety for Explosive Environment

 ,
,
Abstract
:1. Introduction
2. Intrinsically Safe Driving of an Ultrasonic Transducer
2.1. Driving Principle of an Ultrasonic Transducer
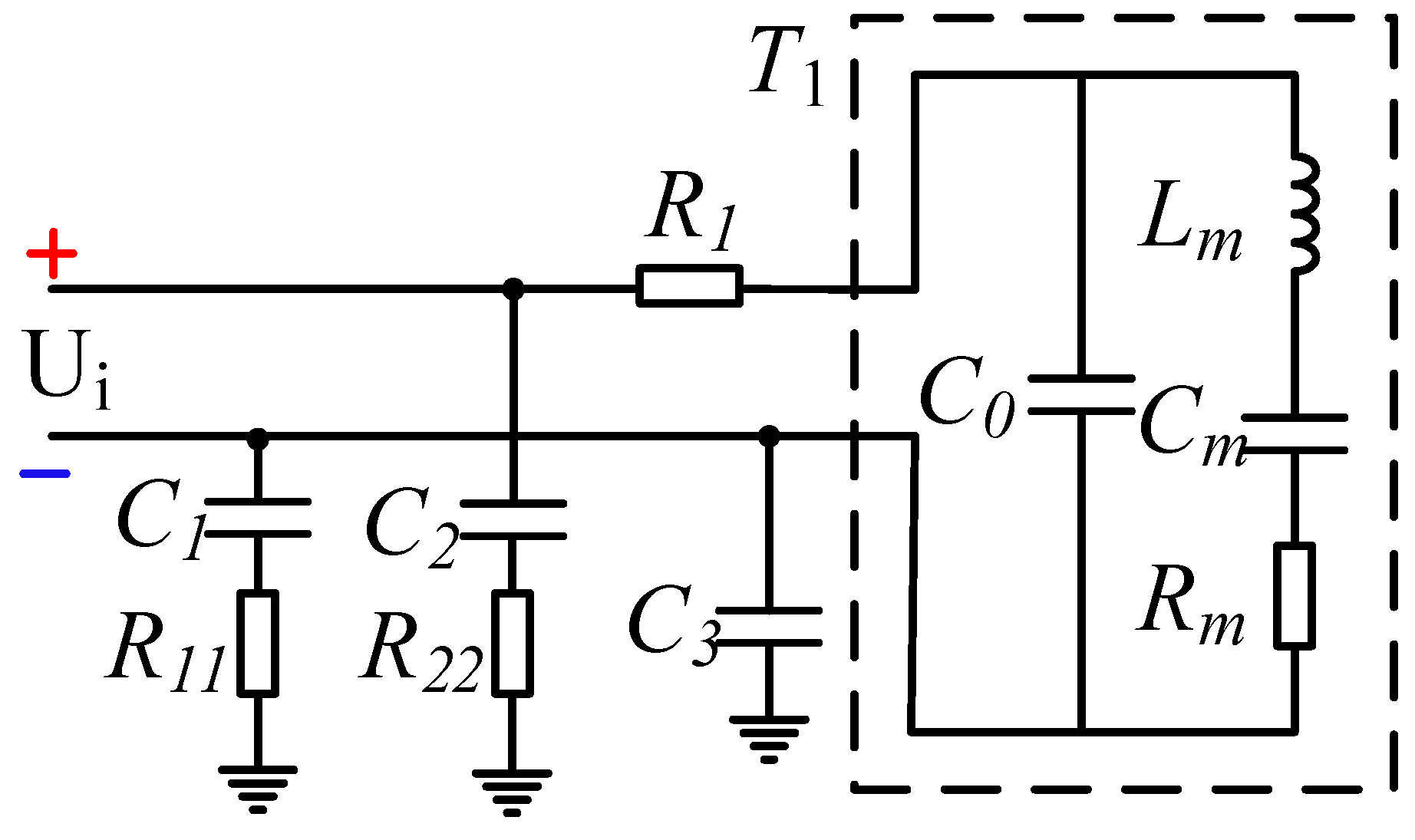
2.2. Acoustic Impedance Matching of the Ultrasonic Transducer
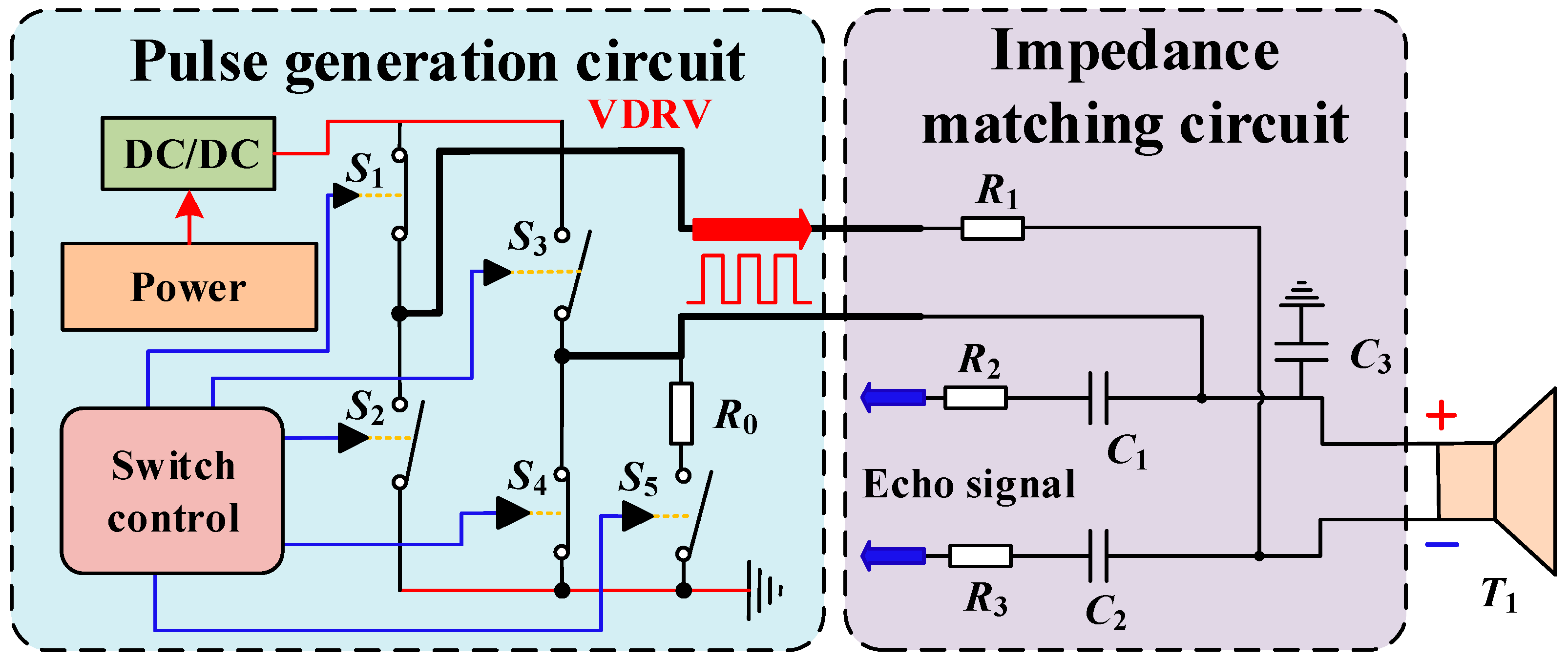
2.3. Design of the Intrinsically Safe Ultrasonic Driving Circuit
2.4. Analysis of Intrinsic Characteristics of the Ultrasonic Driving Circuit
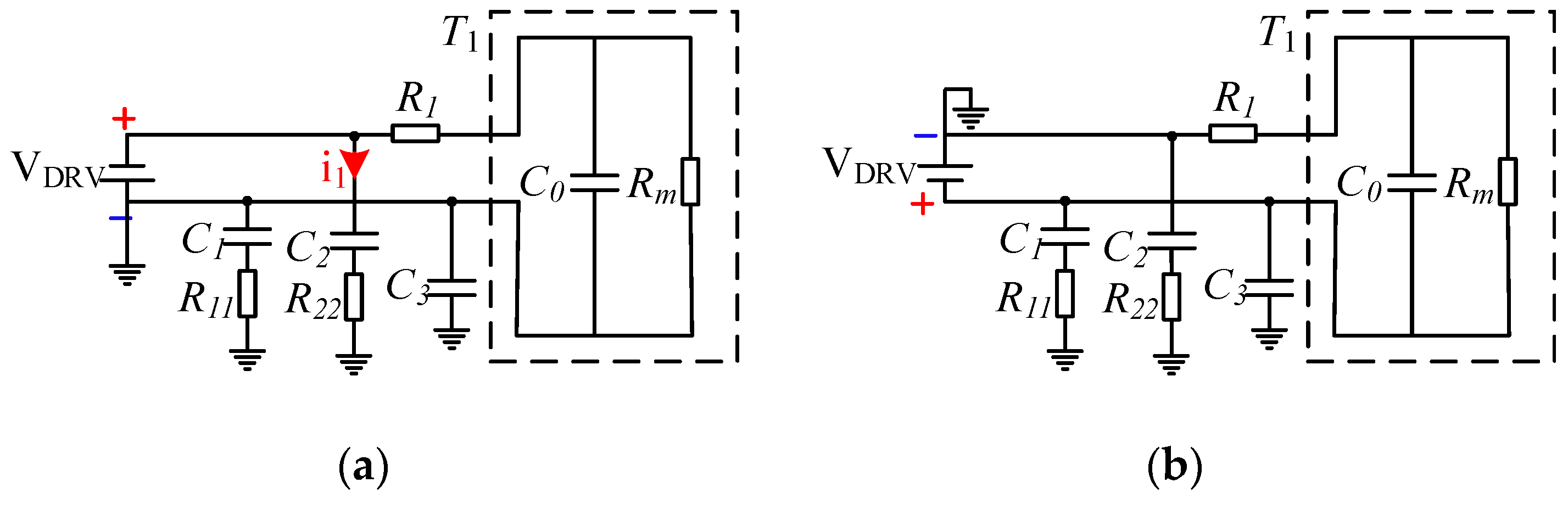
2.4.1. Analysis of Intrinsic Characteristics of Circuit In Normal Conditions
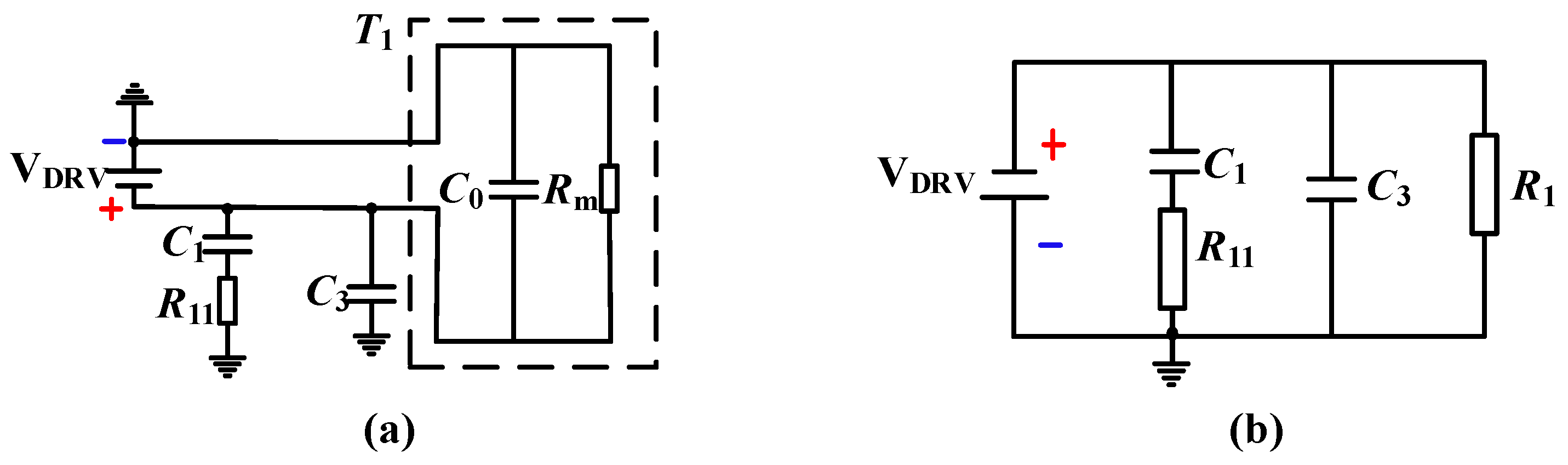
2.4.2. Analysis of Intrinsic Characteristics of Circuit in Fault Conditions
3. Design of Ultrasonic Echo Signal Processing Based on LIN Bus Technology
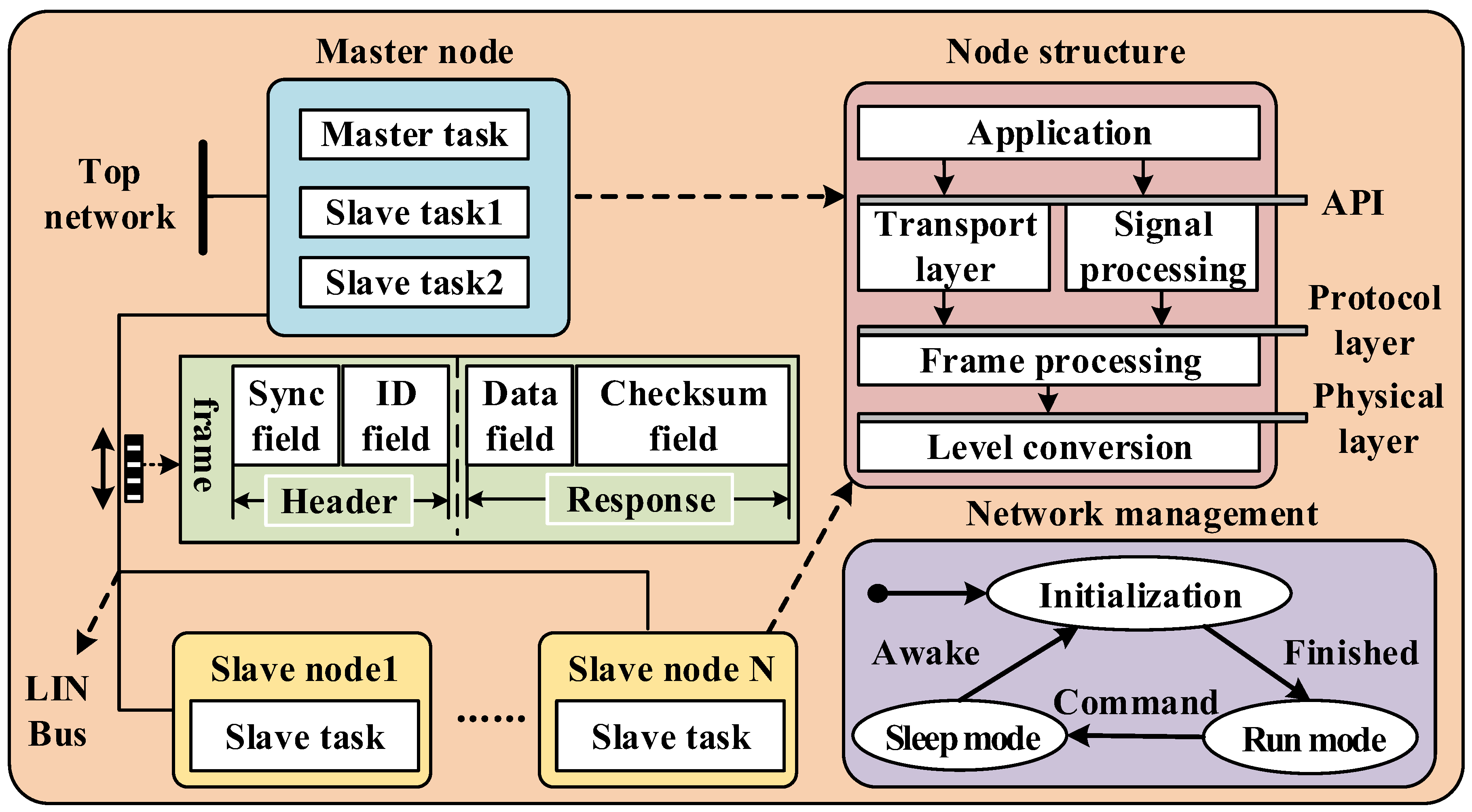
3.1. LIN Bus and Its Network Structure
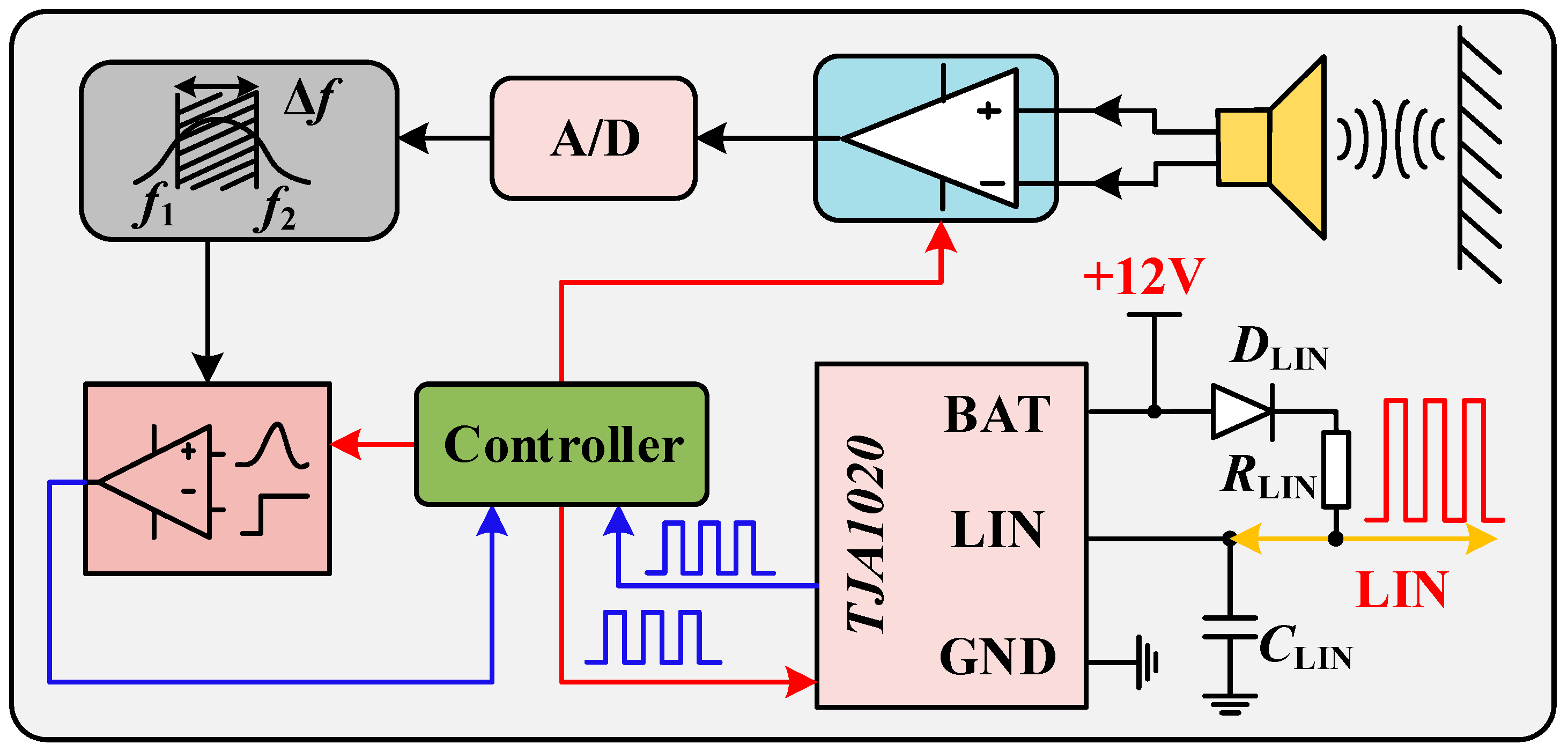
3.2. Design of the Ultrasonic Echo Signal Processing Circuit
3.3. LIN Bus Communication Performance Optimization
4. Realization of the Transformerless Ultrasonic Ranging System
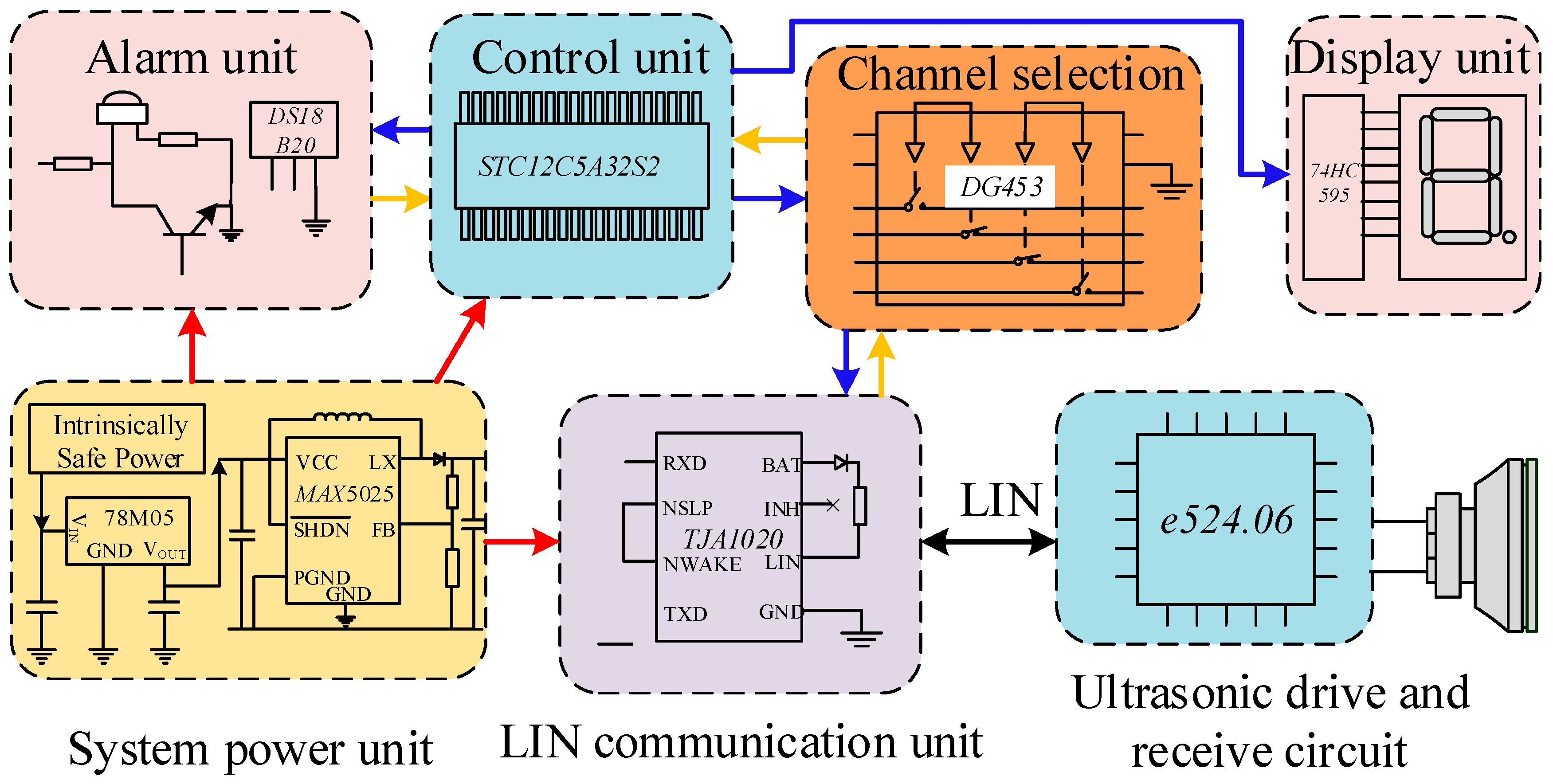
4.1. System Principle Overview
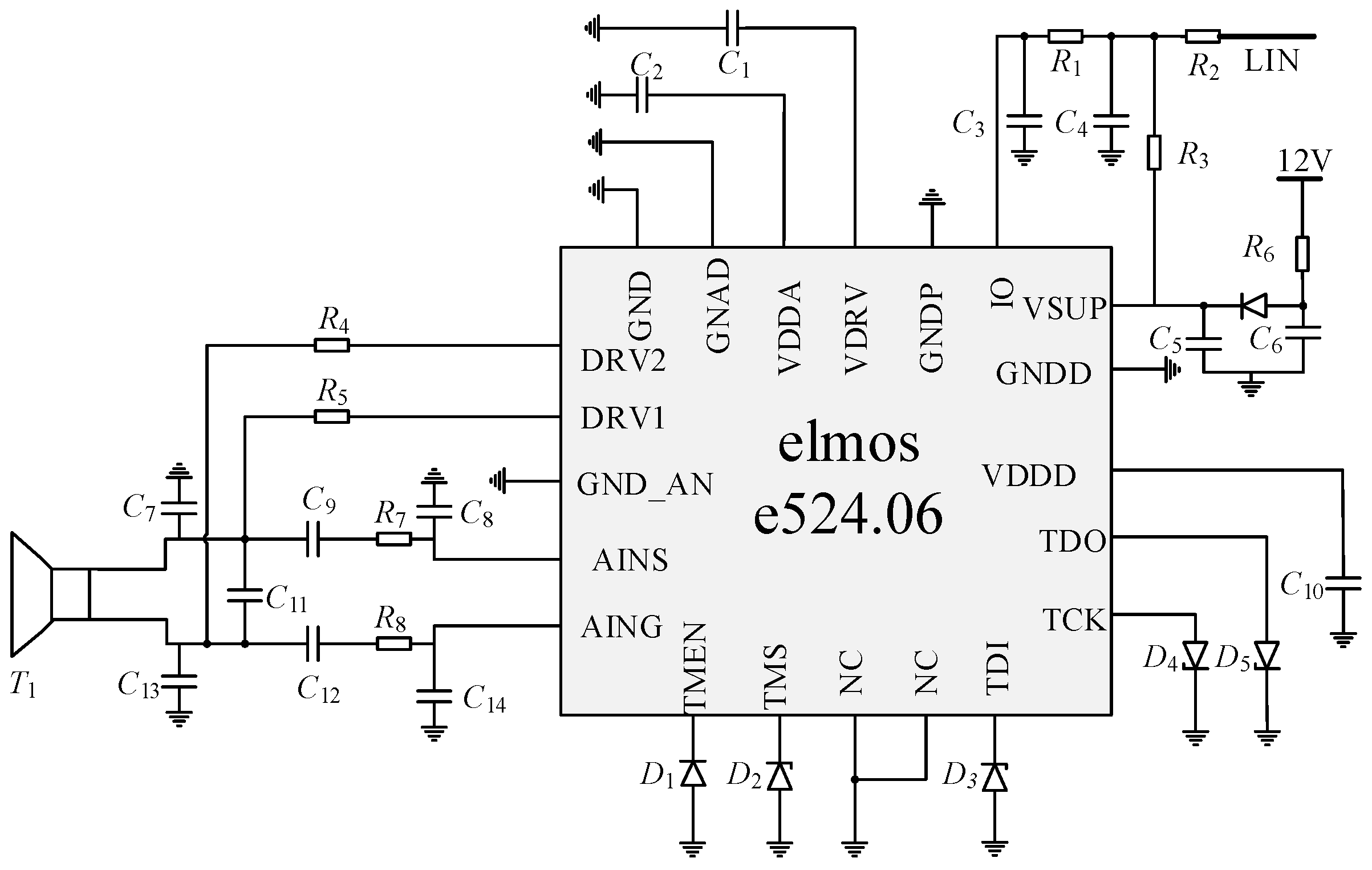
4.2. Design of e524.06 Chip Peripheral Circuit
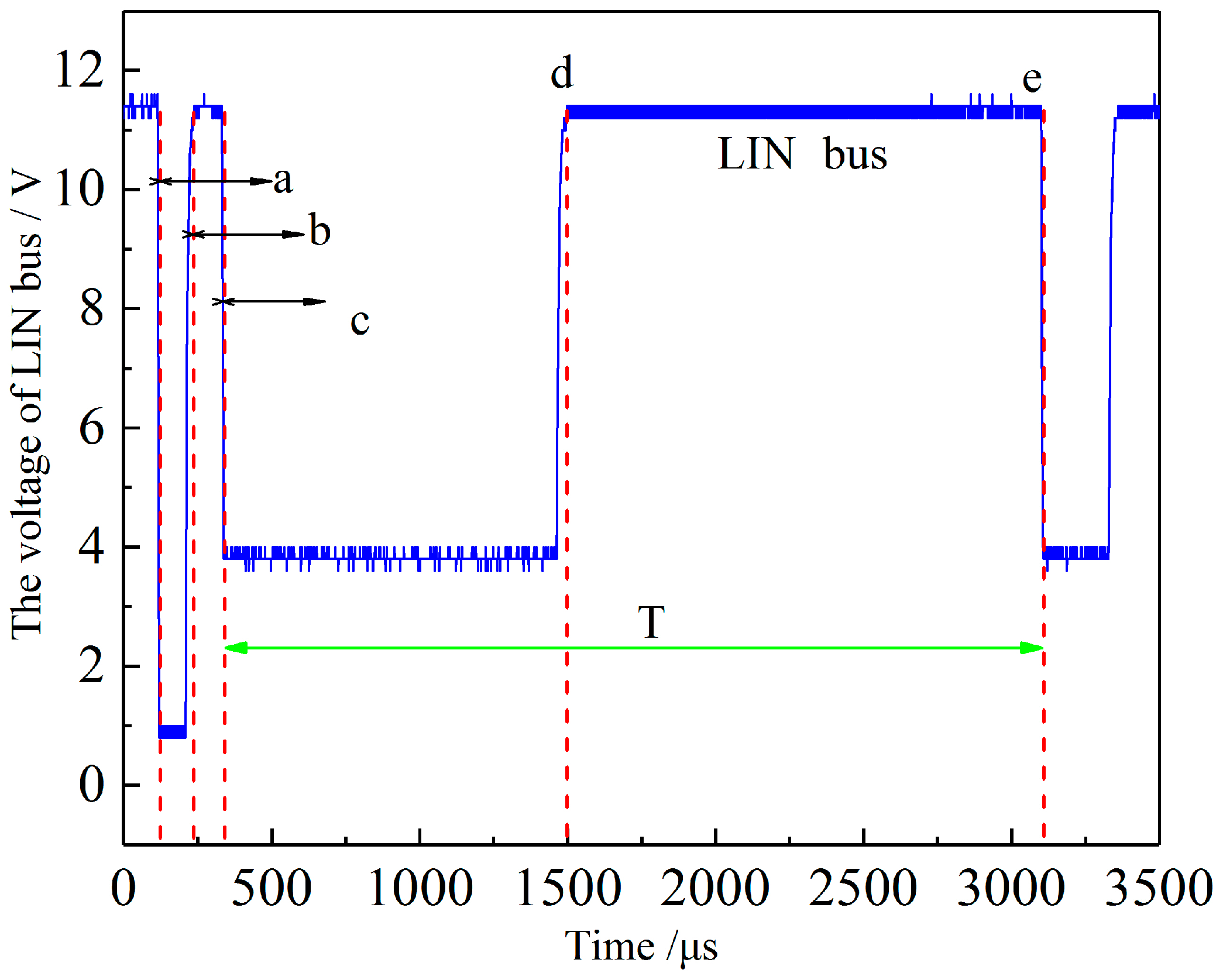
4.3. Instruction and Ranging Timing of e524.06 Chip
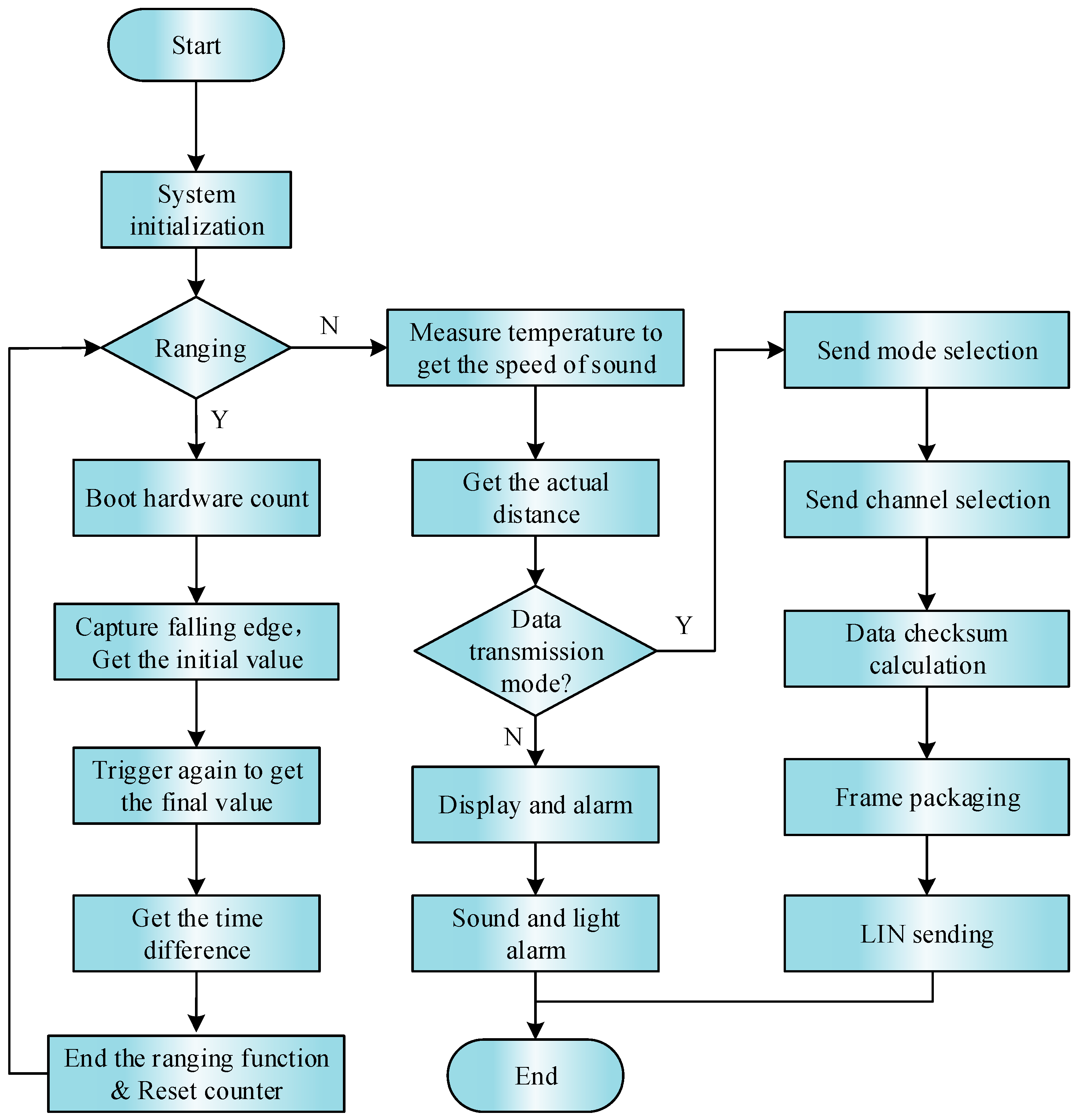
4.4. Software Flow of the System Ranging Process
5. Ultrasonic Ranging Experiment and Analysis
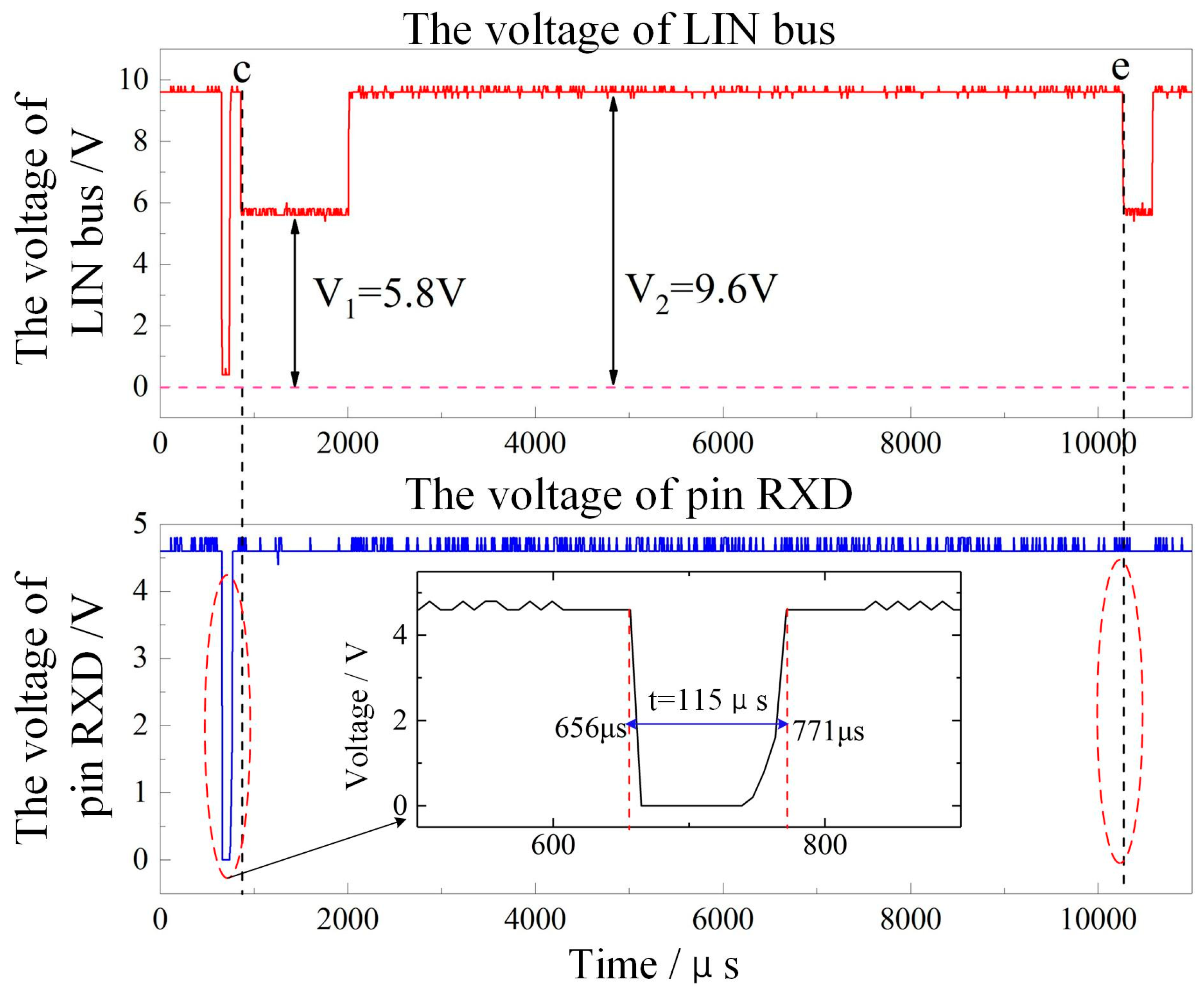
5.1. Analysis of LIN-Bus-Matching Resistance Experiment
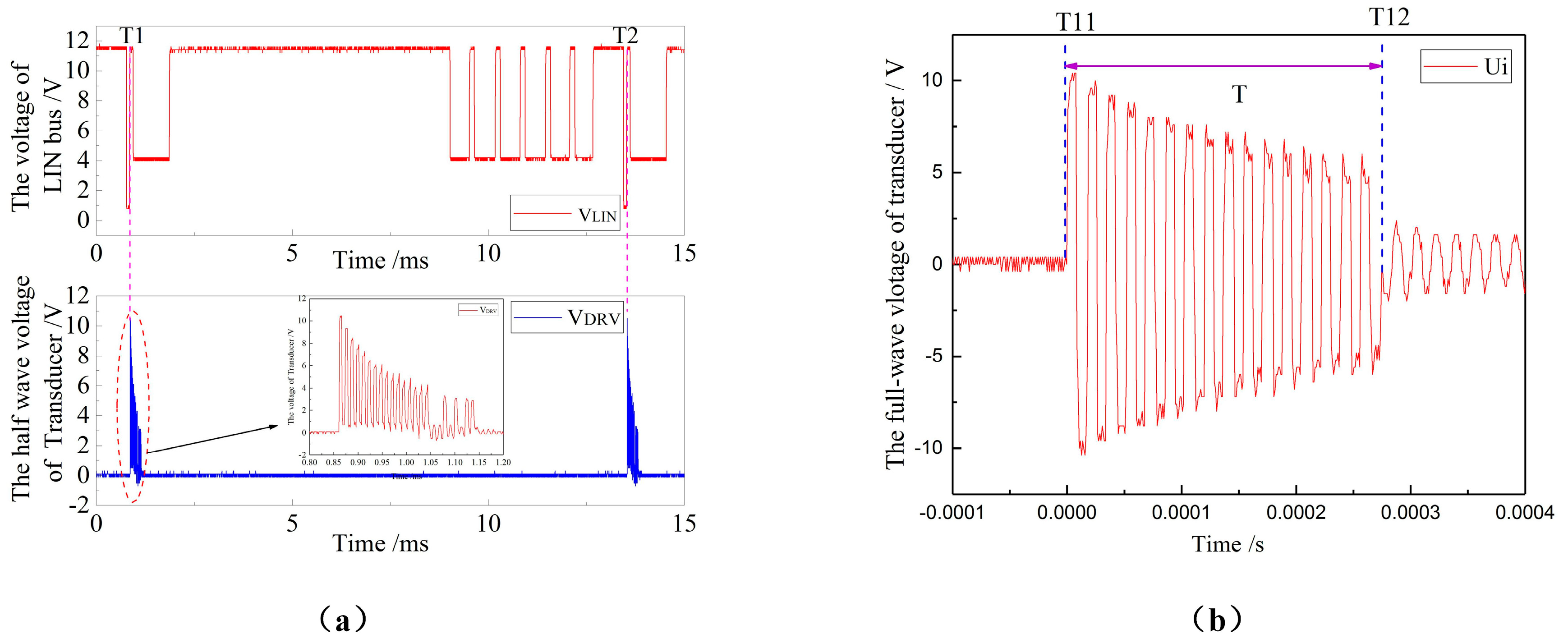
5.2. Analysis of Ultrasonic Ranging Instructions and Driving Wave Experiments
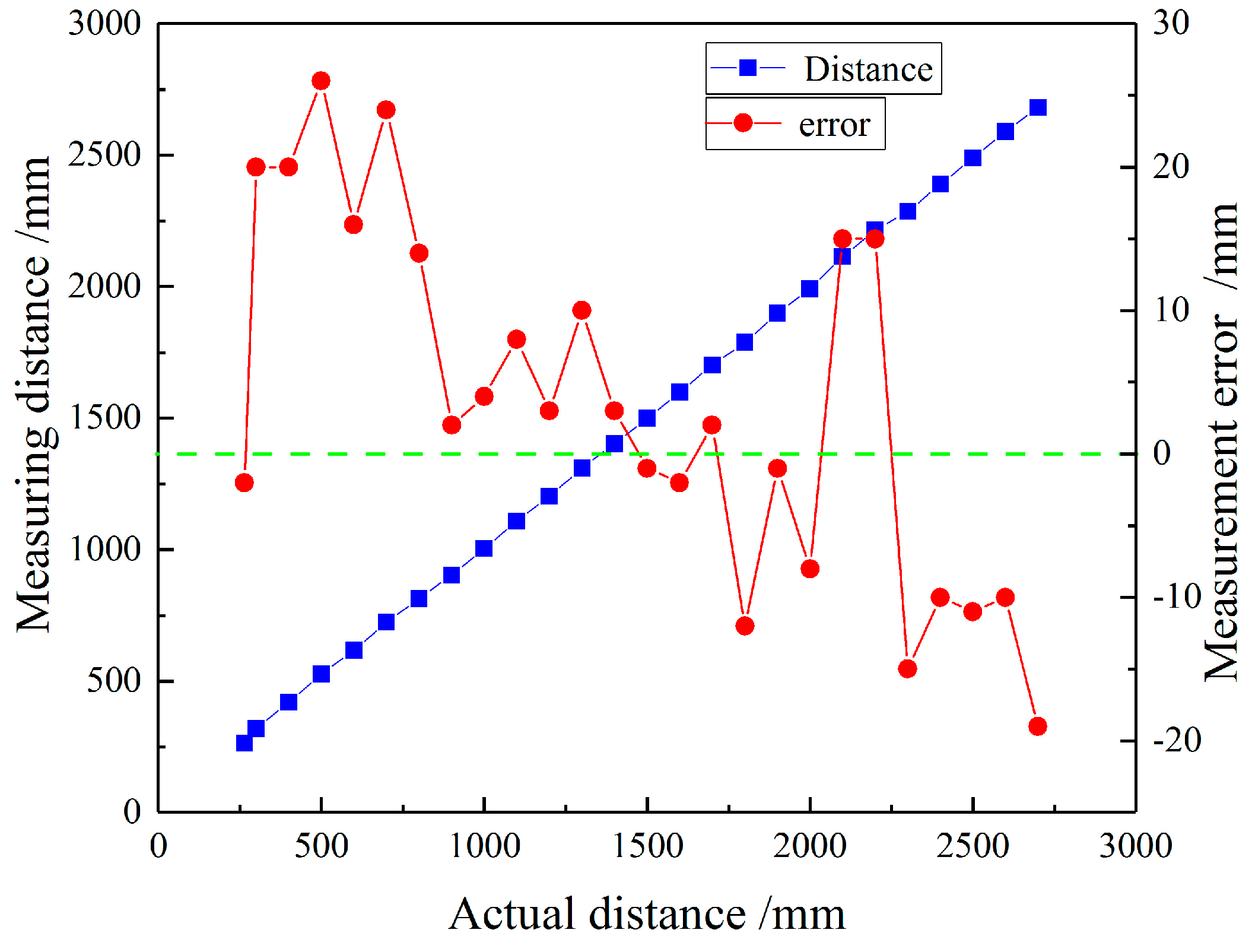
5.3. Analysis of the System Measuring Range
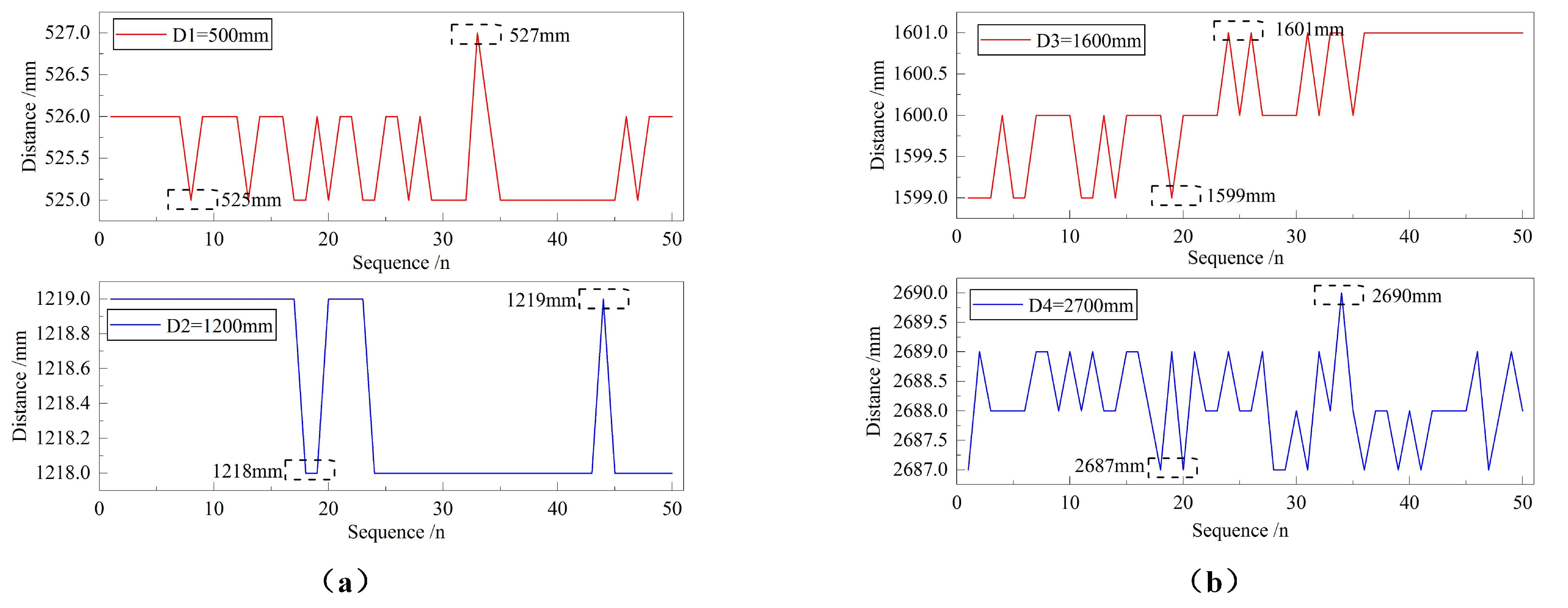
5.4. Analysis of System Measuring Stability
6. Conclusions
Author Contributions
Acknowledgments
Conflicts of Interest
References
- Dash, A.K.; Bhattcharjee, R.M.; Paul, P.S.; Tikader, M. Study and Analysis of Accidents Due to Wheeled Trackless Transportation Machinery in Indian Coal Mines—Identification of Gap in Current Investigation System. Procedia Earth Planet. Sci. 2015, 11, 539–547. [Google Scholar] [CrossRef]
- Kumar, S.; Furuhashi, H. Long-range measurement system using ultrasonic range sensor with high-power transmitter array in air. Ultrasonics 2017, 74, 186–195. [Google Scholar] [CrossRef] [PubMed]
- Yao, Z.; Hong, L.; Cheng, L. Improvement of measurement distance in multi-channel ultrasonic ranging systems through adaptive chaotic pulse position width modulation excitation sequences. Insight Non-Destr. Test. Cond. Monit. 2016, 58, 324–330. [Google Scholar] [CrossRef]
- Mu, W.Y.; Zhang, G.P.; Huang, Y.M.; Yang, X.G.; Liu, H.Y.; Yan, W. Omni-Directional Scanning Localization Method of a Mobile Robot Based on Ultrasonic Sensors. Sensors 2016, 16, 2189. [Google Scholar] [CrossRef] [PubMed]
- Gabriel, G. Indoor Pedestrian Navigation Using Foot-Mounted IMU and Portable Ultrasound Range Sensors. Sensors 2011, 11, 7606–7624. [Google Scholar] [Green Version]
- Yao, Y.; Ju, X.; Lu, J.; Men, B. Acoustic Emission and Echo Signal Compensation Techniques Applied to an Ultrasonic Logging-While-Drilling Caliper. Sensors 2017, 17, 1351. [Google Scholar] [CrossRef] [PubMed]
- Zhang, H.; Wang, Y.; Zhang, X.; Wang, D.; Jin, B. Design and Performance Analysis of an Intrinsically Safe Ultrasonic Ranging Sensor. Sensors 2016, 16, 867. [Google Scholar] [CrossRef] [PubMed]
- CEN: Explosive Atmospheres e Explosion Prevention and Protection Part 1: Basic Conceptsand Methodology; EN 1127-01; European Committee For Standardization: Brussels, Belgium, 2011.
- Davis, S.; Kelly, S.; Somandepalli, V. Hot Surface Ignition of Performance Fuels. Fire Technol. 2010, 46, 363–374. [Google Scholar] [CrossRef]
- Simon, L.H.; Wilkens, V.; Beyer, M. Safety-related conclusions for the application of ultrasound in explosive atmospheres. J. Loss Prev. Process. Ind. 2015, 36, 522–531. [Google Scholar] [CrossRef]
- Addai, E.K.; Gabel, D.; Krause, U. Experimental investigations of the minimum ignition energy and the minimum ignition temperature of inert and combustible dust cloud mixtures. J. Hazard. Mater. 2016, 307, 302–311. [Google Scholar] [CrossRef] [PubMed]
- Zhang, Q.; Li, W.; Zhang, S. Effects of spark duration on minimum ignition energy for methane/air mixture. Process. Saf. Prog. 2011, 30, 154–156. [Google Scholar] [CrossRef]
- Li, Y.; Zhu, H. A simple optimization method for the design of a lightweight, explosion-proof housing for a coal mine rescue robot. J. Braz. Soc. Mech. Sci. Eng. 2018, 40, 340. [Google Scholar] [CrossRef]
- Solheim, F.; Arntzen, B.J.; Eckhoff, R.K. Effect of rusting and mechanical damage of gap surfaces on efficiency of flame gaps in flameproof electrical apparatus. Process. Saf. Environ. Prot. 2012, 90, 317–325. [Google Scholar] [CrossRef]
- Jahdali, R.A.; Wu, Y. High transmission acoustic focusing by impedance-matched acoustic meta-surfaces. Appl. Phys. Lett. 2016, 108, 82–149. [Google Scholar] [CrossRef]
- Toda, M.; Thompson, M. Novel multi-layer polymer-metal structures for use in ultrasonic transducer impedance matching and backing absorber applications. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2010, 57, 2818–2827. [Google Scholar] [CrossRef] [PubMed]
- Kazys, R.J.; Sliteris, R.; Sestoke, J. Air-Coupled Ultrasonic Receivers with High Electromechanical Coupling PMN-32%PT Strip-Like Piezoelectric Elements. Sensors 2017, 17, 2365. [Google Scholar] [CrossRef] [PubMed]
- Kim, H.; Priya, S.; Stephanou, H.; Uchino, K. Consideration of impedance matching techniques for efficient piezoelectric energy harvesting. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2007, 54, 1851–1859. [Google Scholar] [CrossRef] [PubMed]
- Terçariol, W.L.; Ferreira, E.C.; Dias, J.A.S. Analogue control of the slew-rate in LIN bus digital transitions using translinear circuits. Analog Integr. Circuits Signal Process. 2012, 72, 325–331. [Google Scholar] [CrossRef]
- Fang, H.; Han, J.; Wei, Z. Modeling Method of Automotive Body CAN/LIN Nets Application Protocol Based on Object-oriented Colored Petri Net. Chin. J. Mech. Eng. 2011, 24, 999–1006. [Google Scholar] [CrossRef]
- Wan, S.; Jia, M.; Li, L.; Duan, Y.; Sun, Y.; Zhang, W.; Zheng, X.; Gao, J.; Song, Y.; Shi, S.; et al. Ultrasonic Testing Technology and Application; China Machine Press: Beijing, China, 2017; p. 24. [Google Scholar]
- Zhang, B. Safety Spark Circuit; China Coal Industry Publishing House: Beijing, China, 1981; p. 45. [Google Scholar]
- IEC/SC31G: Explosive Atmospheres-Part 11: Equipment Protection by Intrinsic Safety “i”; IEC 60079-11-2006; International Electrotechnical Commission: Geneva, Switzerland, 2006.
- Zhang, Y.; Li, W. Intrinsically Safe Circuit Design; China Coal Industry Publishing House: Beijing, China, 1991; p. 6. [Google Scholar]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Nominal Frequency fs (kHz) | Static Capacitance C0 (pF) | Aftershock Time T (ms) | Maximum Input Voltage Vmax (Vpp) |
|---|---|---|---|
| 58 ± 1.5 | 1400 ± 20% | 1.4 | 120 |
| Driving Voltage Ui (V) | Matching Resistance R1 (Ω) | Matching Capacitance C3 (pF) | Echo-Receiving Capacitance C2 (pF) |
| ±12 | 100 | 220 | 470 |
| Equivalent Resistance R11 (kΩ) | Equivalent Resistance R22 (kΩ) | Static Capacitance C0 (pF) | Echo-Receiving Capacitance C1 (pF) |
| 100 | 100 | 1400 | 470 |
| LIN-Matching Resistor RLIN (kΩ) | LIN High Level V2 (V) | LIN LowLevel V1 (V) | Command Time t (μs) | RX Effectiveness |
|---|---|---|---|---|
| 1 | 9.6 | 5.8 | 115 | Invalid |
| 2 | 8.6 | 4.0 | 123 | Valid |
| 3.5 | 7.8 | 3.2 | 128 | Valid |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, Y.; Qiao, Y.; Zhang, H.; Gao, Y.; Zhang, M.; Tan, H.; Wang, D.; Jin, B. Transformerless Ultrasonic Ranging System with the Feature of Intrinsic Safety for Explosive Environment. Sensors 2018, 18, 4397. https://doi.org/10.3390/s18124397
Wang Y, Qiao Y, Zhang H, Gao Y, Zhang M, Tan H, Wang D, Jin B. Transformerless Ultrasonic Ranging System with the Feature of Intrinsic Safety for Explosive Environment. Sensors. 2018; 18(12):4397. https://doi.org/10.3390/s18124397
Chicago/Turabian StyleWang, Yu, Yuheng Qiao, Hongjuan Zhang, Yan Gao, Ming Zhang, Heng Tan, Dong Wang, and Baoquan Jin. 2018. "Transformerless Ultrasonic Ranging System with the Feature of Intrinsic Safety for Explosive Environment" Sensors 18, no. 12: 4397. https://doi.org/10.3390/s18124397
APA StyleWang, Y., Qiao, Y., Zhang, H., Gao, Y., Zhang, M., Tan, H., Wang, D., & Jin, B. (2018). Transformerless Ultrasonic Ranging System with the Feature of Intrinsic Safety for Explosive Environment. Sensors, 18(12), 4397. https://doi.org/10.3390/s18124397