An Efficient Direct Position Determination Method for Multiple Strictly Noncircular Sources



Abstract
:1. Introduction
- We derive the frequency-domain property of strictly noncircular signals and propose an improved SDF estimator. Based on this noncircular property, we establish an extended frequency-domain observation received by all arrays and compute the extended subspaces, which are implicitly related to array responses and TOAs. Fusing the extended subspaces of all frequency components, a cost function is formulated as the smallest eigenvalue of a symmetric real-valued matrix for each source location, due to a unitary transformation. Therefore, the real-valued eigen-decomposition is required instead of complex computations. Compared with the primitive SDF-based DPDs, this improved SDF estimator retains its superiority for requiring low-dimensional optimization and has higher robustness to noise that comes from exploiting noncircularity.
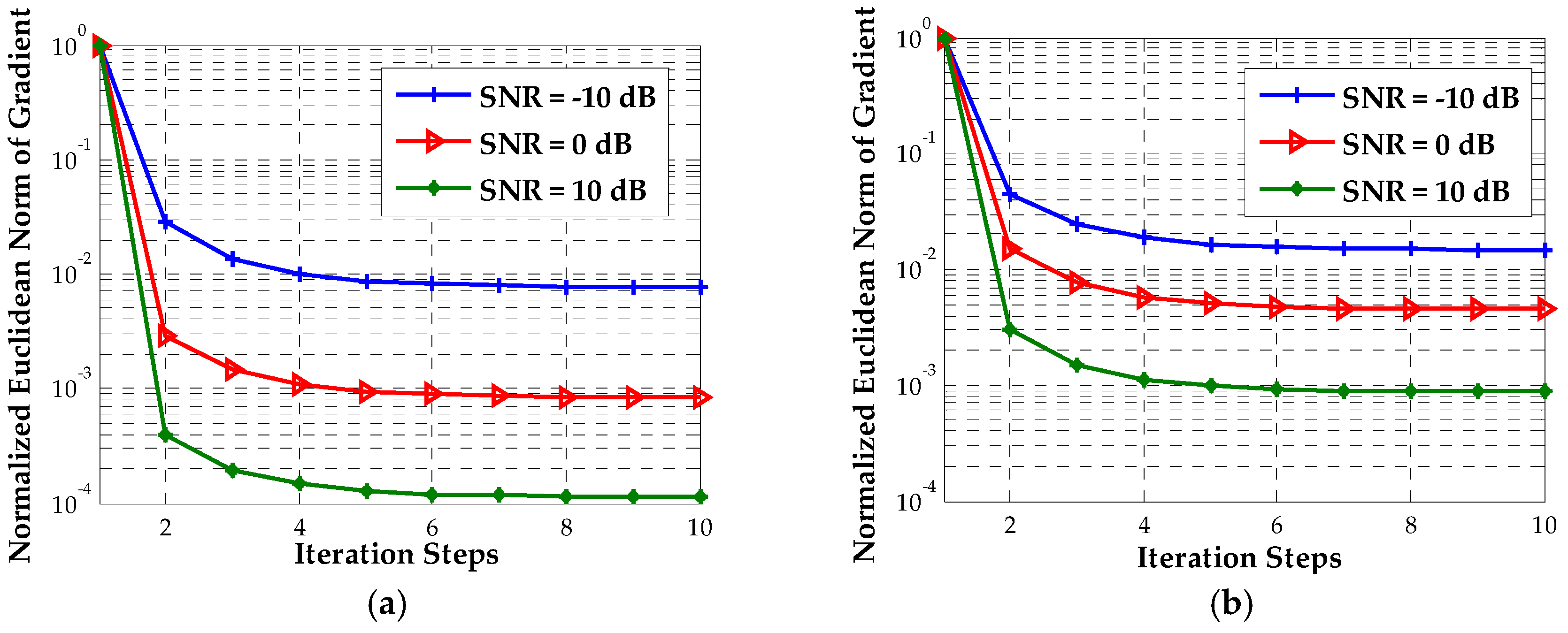
- We devise a Newton-type iterative algorithm to efficiently solve the prescribed cost function based on matrix Eigen-perturbation theory. It substantially reduces the computations of the straightforward implementation of the optimization for each position, which is always accomplished via a two- or three-dimensional grid search.
| Conjugate. | |
| Transpose. | |
| Conjugate transpose. | |
| Composition of the block diagonal matrix. | |
| Composition of the diagonal matrix. | |
| The “vectorization” operator that turns a matrix into a vector by stacking the columns of the matrix, one below another. | |
| Kronecker matrix product. | |
| Expectation. | |
| Trace. | |
| Real part. | |
| Imaginary part. | |
| The n-th element of a vector. | |
| The n,m-th entry of a matrix. | |
| Euclidean norm. | |
| Set of the complex matrices. | |
| Set of the real matrices. |
2. Problem Formulation
2.1. Property of the Noncircular Signal
2.2. Frequency-Domain Signal Model and Problem Formulation
3. Methods
3.1. Extended SDF
3.2. Iterative Solution
| Method: Eigen-Perturbation-Based Newton-Type Iterative Method |
|
| 9: end for |
3.3. Computational Complexity
4. Results
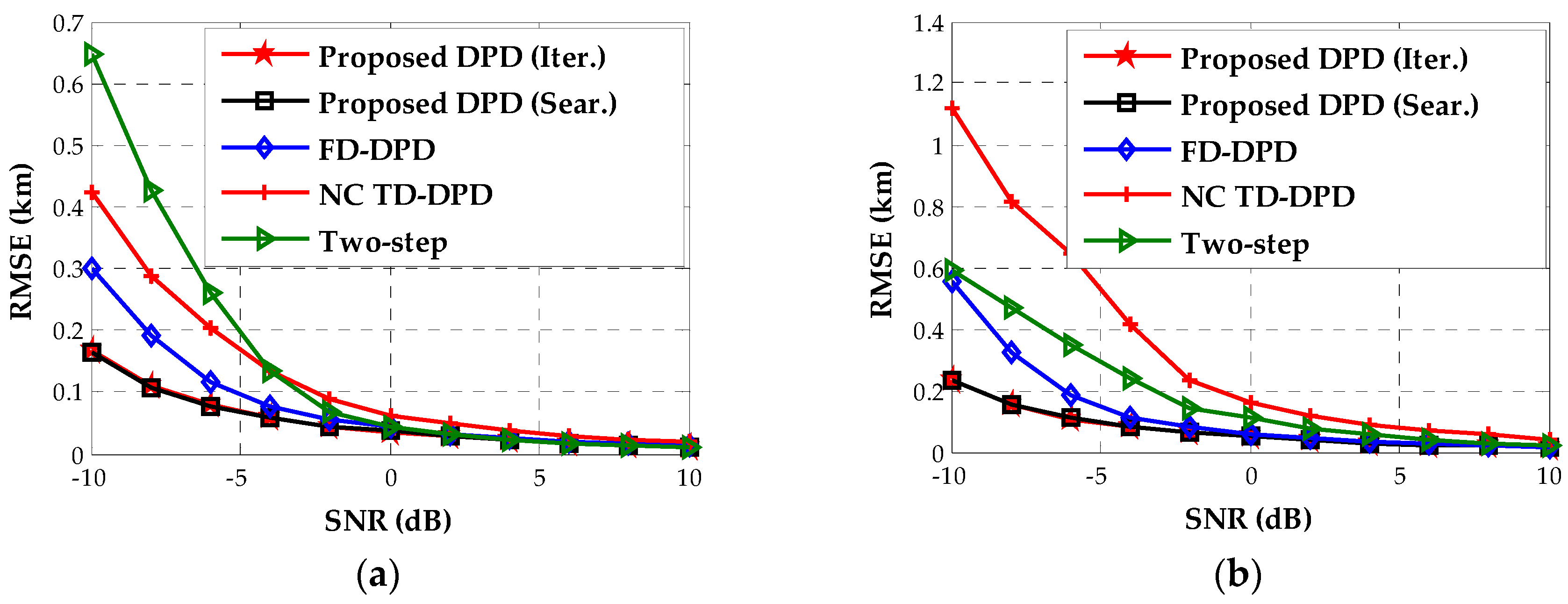
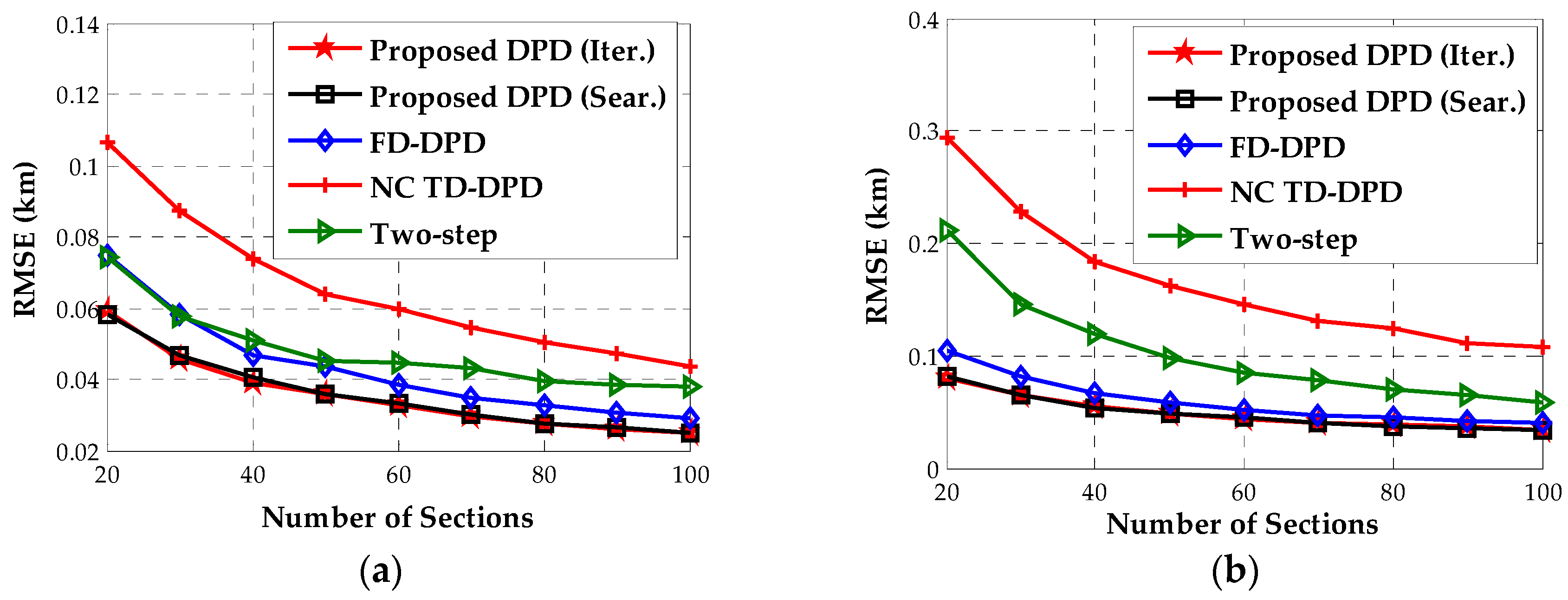
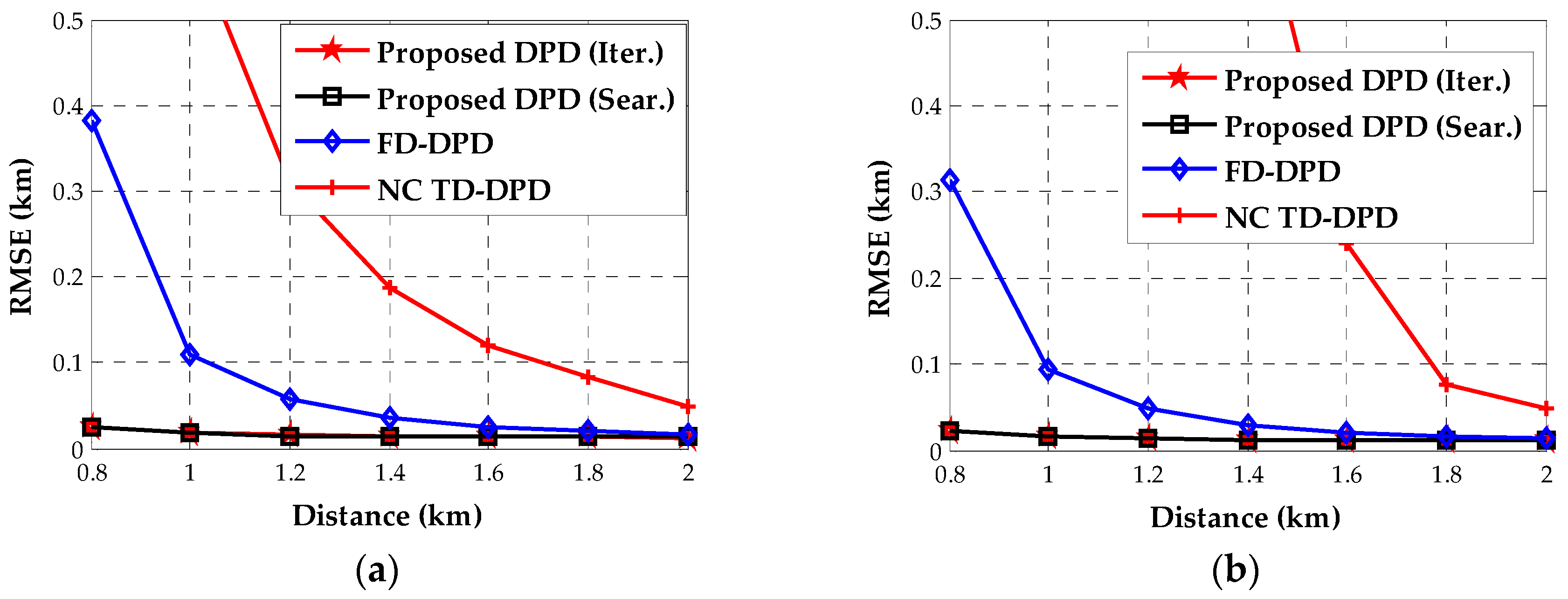
- Proposed DPD estimator using the devised Newton-type iterative method.
- Proposed DPD estimator using the exhaustive search.
- SDF-based DPD estimator for general circular sources in the frequency domain [16] (denoted by FD-DPD).
- SDF-based DPD estimator for noncircular sources in time domain [19] (denoted by NC TD-DPD).
- Two-step processing estimator: DOA estimation using the NC-MUSIC algorithm [5] and TOA estimation using the ML criterion for noncircular signals [7] at each observer, and pseudo-linear weighted least square localization with the DOA and TOA estimates from all observers used as the data, where DOA and TOA estimates are assumed to be associated with the correct transmitter (denoted by two-step).
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Appendix A
Appendix B
References
- Qian, G.B.; Li, L.P.; Luo, M.G. On the blind channel identifiability of MIMO-STBC systems using noncircular complex fastICA algorithm. Circuits Syst. Signal Process. 2014, 33, 1859–1881. [Google Scholar] [CrossRef]
- Yang, X.M.; Li, G.J.; Zheng, Z. A novel covariance based noncircular sources direction finding method under impulsive noise environment. Signal Process. 2014, 98, 252–262. [Google Scholar]
- Hassen, S.B.; Bellili, F.; Samet, A. DOA estimation of temporally and spatially correlated narrowband noncircular sources in spatially correlated white noise. IEEE Trans. Signal Process. 2011, 59, 4108–4121. [Google Scholar] [CrossRef]
- Xie, J.; Tao, H.H.; Rao, X. Efficient method of passive location for near-field noncircular sources. IEEE Antennas Wirel. Propag. Lett. 2015, 14, 1223–1226. [Google Scholar] [CrossRef]
- Abeida, H.; Delmas, J.-P. MUSIC-like estimation of direction of arrival for noncircular sources. IEEE Trans. Signal Process. 2006, 54, 2678–2690. [Google Scholar] [CrossRef]
- Yin, J.X.; Wu, Y.; Wang, D. An auto-calibration method for spatially and temporally correlated noncircular sources in unknown noise fields. Multidimens. Syst. Signal Process. 2016, 27, 511–539. [Google Scholar] [CrossRef]
- Wen, F.; Wan, Q.; Liu, Y.P. Passive time delay estimation for complex noncircular signals. In Proceedings of the IEEE International Symposium on Electronics and Telecommunications, Timisoara, Romania, 15–16 November 2012. [Google Scholar]
- Wax, M.; Kailath, T. Decentralized processing in sensor arrays. IEEE Trans. Acoust. Speech Signal Process. 1985, 33, 1123–1129. [Google Scholar] [CrossRef]
- Stoica, P.; Nehorai, A.; Söderström, T. Decentralized array processing using the MODE algorithm. Circuits Syst. Signal Process. 1995, 14, 17–38. [Google Scholar] [CrossRef]
- Shen, J.Y.; Molisch, A.F.; Salmi, J. Accurate passive location estimation using TOA measurements. IEEE Trans. Wirel. Commun. 2011, 11, 253–257. [Google Scholar]
- Wang, Y.L.; Wu, Y. An efficient semidefinite relaxation algorithm for moving source localization using TDOA and FDOA measurements. IEEE Commun. Lett. 2017, 21, 80–83. [Google Scholar] [CrossRef]
- Wax, M.; Kailath, T. Optimum localization of multiple sources by passive arrays. IEEE Trans. Acoust. Speech Signal Process. 1983, 31, 1210–1217. [Google Scholar] [CrossRef]
- Li, J.; Yang, L.; Guo, F. Coherent summation of multiple short-time signals for direct positioning of a wideband source based on delay and Doppler. Digit. Signal Process. 2016, 48, 58–70. [Google Scholar] [CrossRef]
- Weiss, A.J. Direct position determination of narrowband radio frequency transmitters. IEEE Signal Process. Lett. 2004, 11, 513–516. [Google Scholar] [CrossRef]
- Tirer, T.; Weiss, A.J. High resolution direct position determination of radio frequency sources. IEEE Signal Process. Lett. 2016, 23, 192–196. [Google Scholar] [CrossRef]
- Weiss, A.J.; Amar, A. Direct position determination of multiple radio signals. EURASIP J. Appl. Signal Process. 2005, 1, 1–13. [Google Scholar] [CrossRef]
- Amar, A.; Weiss, A.J. A decoupled algorithm for geolocation of multiple emitters. Signal Process. 2007, 87, 2348–2359. [Google Scholar] [CrossRef]
- Huang, Z.Y.; Wu, J. Multi-array data fusion based direct position determination algorithm. In Proceedings of the IEEE Seventh International Symposium on Computational Intelligence and Design, Hangzhou, China, 13–14 December 2014; pp. 121–124. [Google Scholar]
- Yin, J.X.; Wu, Y.; Wang, D. Direct position determination of multiple noncircular sources with a moving array. Circuits Syst. Signal Process. 2017, 36, 1–27. [Google Scholar] [CrossRef]
- Ke, W.; Wang, T.T.; Wu, L.N. Multi-target direct location via approximate l0 norm minimization. Electron. Lett. 2012, 48, 1498–1500. [Google Scholar] [CrossRef]
- Oispuu, M.; Nickel, U. Direct detection and position determination of multiple sources with intermittent emission. Signal Process. 2010, 90, 3056–3064. [Google Scholar] [CrossRef]
- Tzoreff, E.; Weiss, A.J. Expectation-maximization algorithm for direct position determination. Signal Process. 2016, 133, 32–39. [Google Scholar] [CrossRef]
- Haardt, M.; Römer, F. Enhancements of unitary ESPIRIT for non-circular sources. In Proceedings of the IEEE International Conference on Acoustics, Montral, QC, Canada, 17–21 May 2004; pp. 101–104. [Google Scholar]
- Kumar, M.; Singh, A.K.; Srivastava, A. Various Newton-type iterative methods for solving nonlinear equations. J. Egypt. Math. Soc. 2013, 21, 334–339. [Google Scholar] [CrossRef]
- Wang, D.; Wu, Y. Statistical performance analysis of direct position determination method based on Doppler shifts in presence of model errors. Multidimens. Syst. Signal Process. 2015, 28, 1–34. [Google Scholar] [CrossRef]
- Zhang, X.D. Matrix Analysis and Application; Tsinghua University Press: Beijing, China, 2004. [Google Scholar]
- Magnus, J.R.; Neudecker, H. Matrix Differential Calculus with Application in Statistics and Econometrics; John Wiley & Sons, Inc.: Essex, UK, 1988. [Google Scholar]
- Wang, D. Sensor array calibration in presence of mutual coupling and gain/phase errors by combining the spatial-domain and time-domain waveform information of the calibration sources. Circuits Syst. Signal Process. 2013, 32, 1257–1292. [Google Scholar] [CrossRef]
- Nelder, J.A.; Mead, R. A simplex method for function minimization. Comput. J. 1965, 7, 308–313. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method | Complexity | Comments | |||
|---|---|---|---|---|---|
| Computing DFT | Estimating Covariance Matrix | Eigen-Decomposition | Solving Cost Function | ||
| SDF-based DPD in [16] | - For circular sources | ||||
| Proposed DPD using exhaustive search | - For strictly noncircular sources | ||||
| Proposed DPD using Newton-type iteration | - For strictly noncircular sources - Complexity for initialization is not included | ||||
| Method | Runtime (s) |
|---|---|
| Proposed DPD (Newton-type Iterative Method) | 0.0818 |
| Proposed DPD (Exhaustive Grid Search) | 0.7802 |
| Proposed DPD (Nelder–Mead Simplex Search) | 0.1231 |
| FD-DPD | 0.5274 |
| NC TD-DPD | 0.5070 |
| Two-step | 0.3120 |
| Source | Method | SNR (dB) | |||||
|---|---|---|---|---|---|---|---|
| −10 | −6 | −2 | 2 | 6 | 10 | ||
| Source 1 | Newton-type Iterative Method | 0.167 | 0.079 | 0.049 | 0.028 | 0.017 | 0.011 |
| Nelder-Mead Simplex Search | 0.166 | 0.078 | 0.050 | 0.029 | 0.017 | 0.012 | |
| Source 2 | Newton-type Iterative Method | 0.257 | 0.109 | 0.063 | 0.038 | 0.024 | 0.015 |
| Nelder–Mead Simplex Search | 0.258 | 0.110 | 0.063 | 0.039 | 0.023 | 0.016 | |
| Method | Runtime (s) |
|---|---|
| Proposed DPD (Newton-type Iterative Method) | 0.0856 |
| Proposed DPD (Exhaustive Grid Search) | 0.7869 |
| Proposed DPD (Nelder–Mead Simplex Search) | 0.1330 |
| FD-DPD | 0.5144 |
| NC TD-DPD | 0.5072 |
| Two-step | 0.3132 |
| Source | Method | SNR (dB) | |||||
|---|---|---|---|---|---|---|---|
| −5 | 0 | 5 | 10 | 15 | 20 | ||
| Source 1 | Newton-type Iterative Method | 0.935 | 0.243 | 0.108 | 0.053 | 0.029 | 0.016 |
| Nelder-Mead Simplex Search | 0.933 | 0.250 | 0.101 | 0.050 | 0.029 | 0.016 | |
| Source 2 | Newton-type Iterative Method | 1.168 | 0.325 | 0.135 | 0.068 | 0.035 | 0.020 |
| Nelder–Mead Simplex Search | 1.160 | 0.324 | 0.141 | 0.068 | 0.036 | 0.021 | |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yin, J.; Wang, D.; Wu, Y. An Efficient Direct Position Determination Method for Multiple Strictly Noncircular Sources. Sensors 2018, 18, 324. https://doi.org/10.3390/s18020324
Yin J, Wang D, Wu Y. An Efficient Direct Position Determination Method for Multiple Strictly Noncircular Sources. Sensors. 2018; 18(2):324. https://doi.org/10.3390/s18020324
Chicago/Turabian StyleYin, Jiexin, Ding Wang, and Ying Wu. 2018. "An Efficient Direct Position Determination Method for Multiple Strictly Noncircular Sources" Sensors 18, no. 2: 324. https://doi.org/10.3390/s18020324
APA StyleYin, J., Wang, D., & Wu, Y. (2018). An Efficient Direct Position Determination Method for Multiple Strictly Noncircular Sources. Sensors, 18(2), 324. https://doi.org/10.3390/s18020324