1. Introduction
The internet of things (IoT) is a new paradigm, which connects any physical objects embedded with ambient computational intelligence to each other such that these objects can recognize others and exchange collected data [
1,
2,
3]. With the advent of the Internet of Things, there has been an increasing demand on the transducers that are able to perform diverse functions such as sensors, actuators, and radio frequency identification tags, for a wide variety of applications including communication, imaging, display, finance, data centers, transportation, health-care, and biomedical devices [
4,
5,
6,
7,
8,
9,
10].
Capacitive micromachined ultrasonic transducers (CMUTs) [
11,
12,
13], piezoelectric transducers [
14,
15,
16], and electro-neural stimulators [
17,
18,
19,
20,
21], in particular, need to drive nonlinear capacitive load with a large impedance variation. With such a variable capacitive load, in order to achieve an extremely high-resolution control (e.g., 16-bit resolution) to the extent well beyond the present state-of-the-art, which is typically implemented with less than 6–8-bit resolution [
22,
23,
24], the electronic interface circuitry of such transducers requires a precision high-gain operational amplifier. However, it is challenging to design an internally compensated high-gain operational amplifier particularly when the amplifier needs to drive a very wide-range of load capacitance but an available chip area for the amplifier is limited [
25,
26,
27,
28,
29,
30,
31,
32,
33,
34,
35,
36,
37,
38,
39,
40,
41,
42,
43].
A sufficient direct-current (DC) voltage gain can be generated by multi-stage amplifiers [
32,
33,
34,
35,
36,
37,
38,
39,
40,
41]. However, multi-stage operational amplifiers suffer from stability problems with variable capacitive loads. Although frequency compensation techniques are commonly used in multi-stage amplifiers to improve feedback stability [
25,
26,
27,
28,
29,
30,
31,
32,
33,
34,
35,
36,
37,
38,
39,
40,
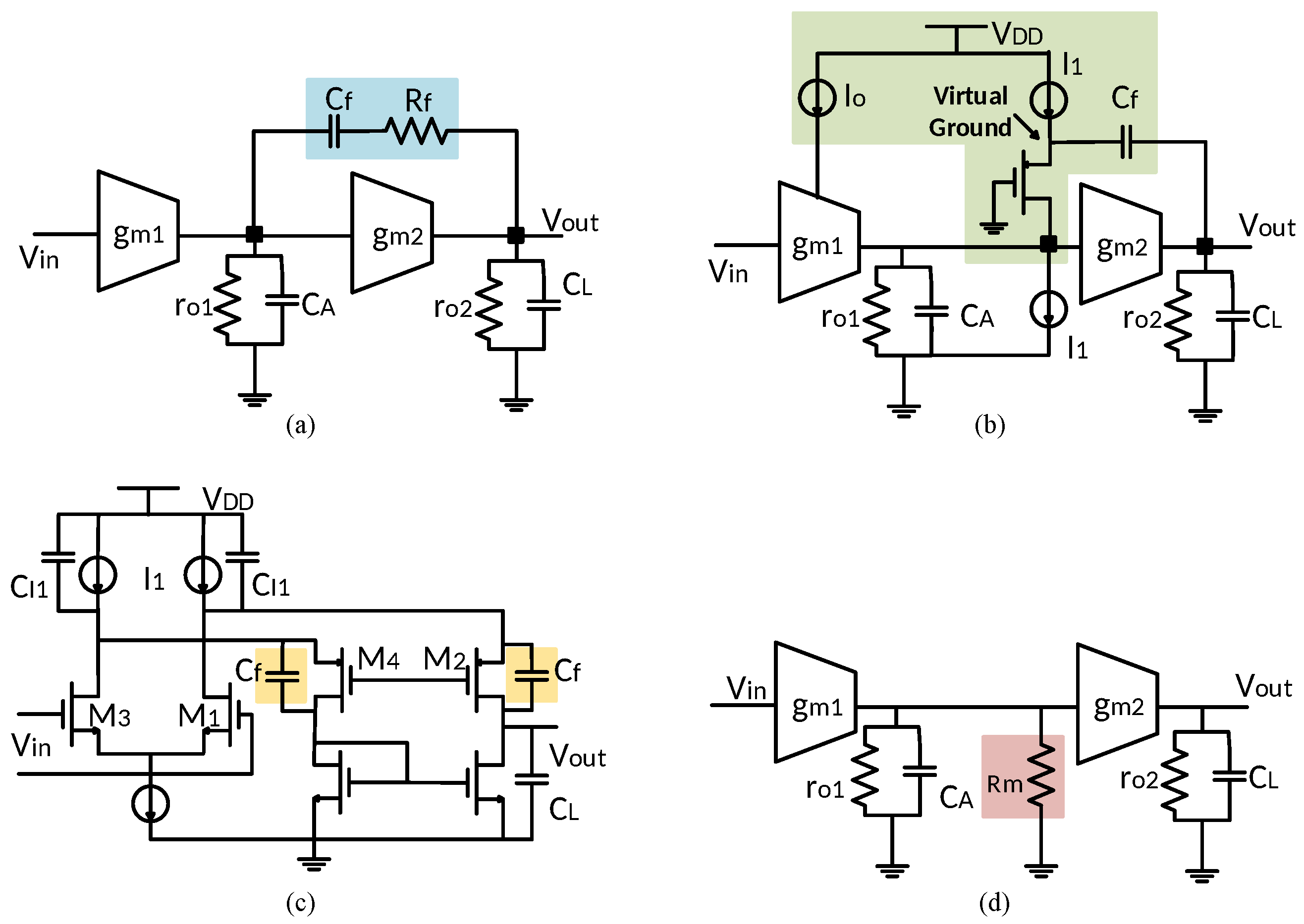
41], these conventional compensation techniques do not allow a wide range of load capacitance. In addition, a compensation capacitor occupies a large chip area, especially when a high capacitive load exists. The pseudo single-stage (PSS) amplifier [
42], which in fact is a multi-stage amplifier, was recently introduced to improve the feedback stability by decreasing its first-stage gain to reduce the compensation capacitor size.
In this paper, we present a gain-boosted two-stage operational amplifier, whose compensation capacitance size is less sensitive of load capacitance compared to the previously reported operational amplifiers. Compared to the PSS amplifier, rather than decreasing the first-stage gain [
42], the proposed amplifier alternating-current-couples the first-stage and adds a gain-boosting stage to the second-stage input, which provides a higher flexibility in frequency compensation and also allows low-power operation and a higher unity-gain frequency. The compensation capacitor size of a prototype operational amplifier is up to four orders of magnitude smaller than the load capacitance. By combing the conventional Miller compensation with a pole-zero cancellation technique, compared to the previously reported high-gain operational amplifiers, the proposed operational amplifier allows the smallest compensation capacitor size for a given load capacitance [
38,
39,
40,
41,
42,
43].
The remainder of this paper is organized as follows.
Section 2 reviews the previously known operational amplifier stability compensation techniques.
Section 3 presents the operation and architectural analysis of the proposed operational amplifier with a novel stability compensation technique. The detailed circuit implementation and pole-zero cancellation analysis are given in
Section 4. Simulation results and performance comparison with the present state-of-the-art are presented in
Section 5. Concluding remarks are stated in
Section 6.
3. Proposed Architecture
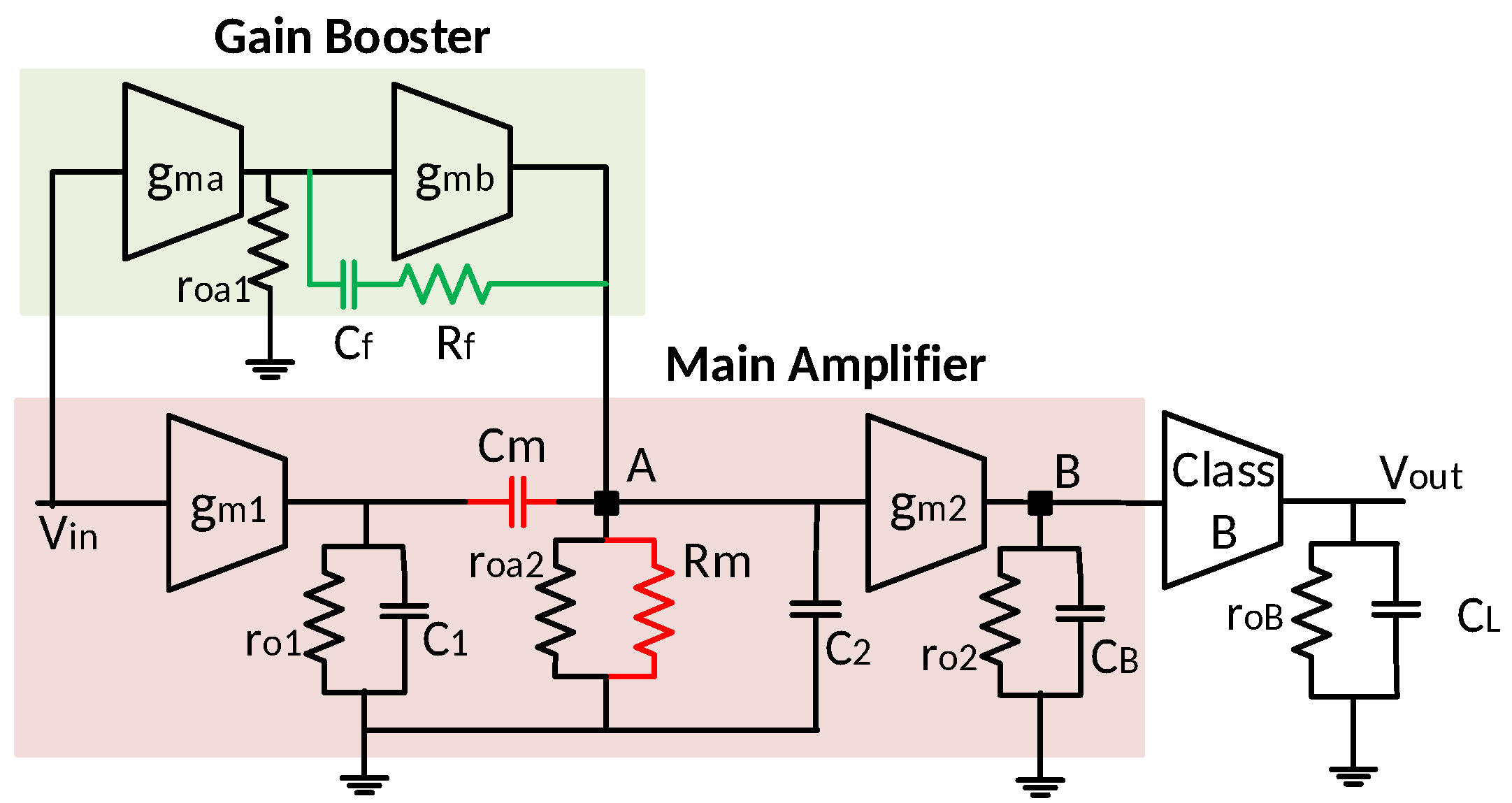
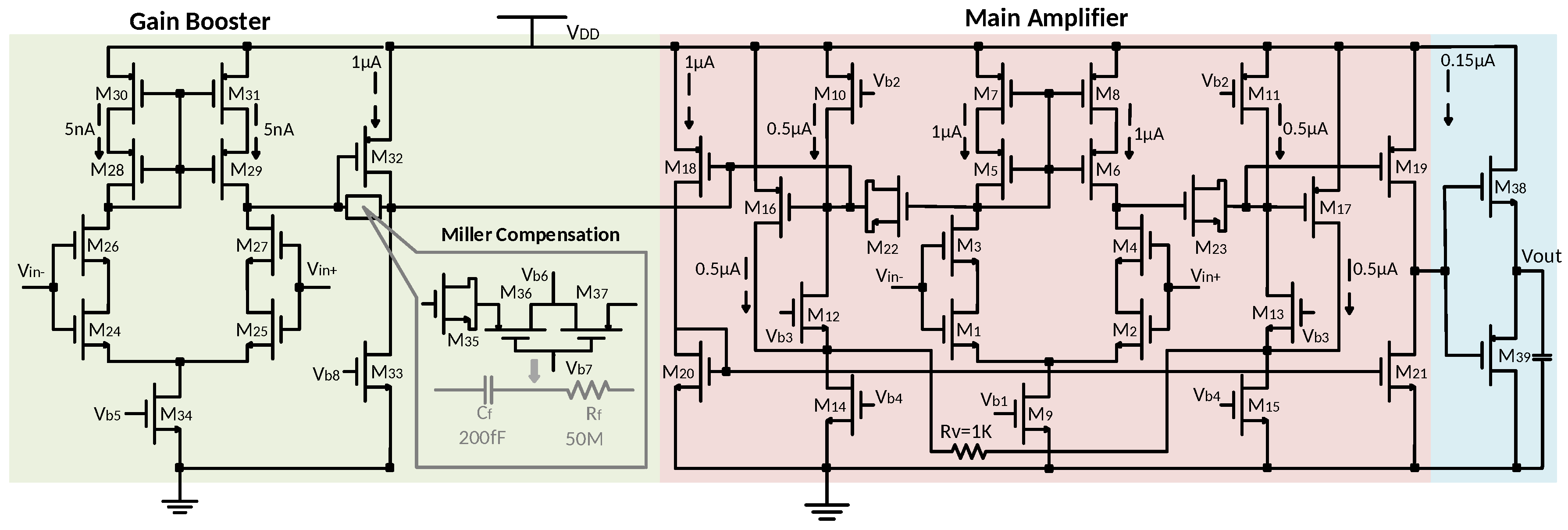
The proposed operational amplifier architecture is illustrated in
Figure 2. It consists of a main amplifier, a gain booster, and a Class-B output stage.
In the main amplifier, the first stage transconductance
is alternating-current (AC) coupled to the second stage transconductance
through the capacitor
, the voltage gain at point A is generated by the gain booster. The transfer function from the input
to the point A
is
where
and
are the transconductance,
and
are the output impedance, of the first and second stage of gain booster, respectively.
is the output impedance of the first stage, and
is the inter-stage load impedance, in main amplifier. Because of the Miller effect, the impedance of
in series with
is amplified by
, where
is the DC voltage gain of the second stage of gain booster. The voltage gain between A and B is
where
is the output impedance of the second stage of main amplifier. Therefore, the overall transfer function from the input
to the output
is obtained as
where
and
is the transconductance and output impedance of the Class-B output stage, respectively. Compared to other capacitors in this function,
is much smaller and negligible. This function is approximated to
where
Note that is the dominant pole introduced by the gain booster, and is the zero of the gain booster. is the amplifier output node pole, and is the pole from node A, and is the transconductance of the Class-B output stage.
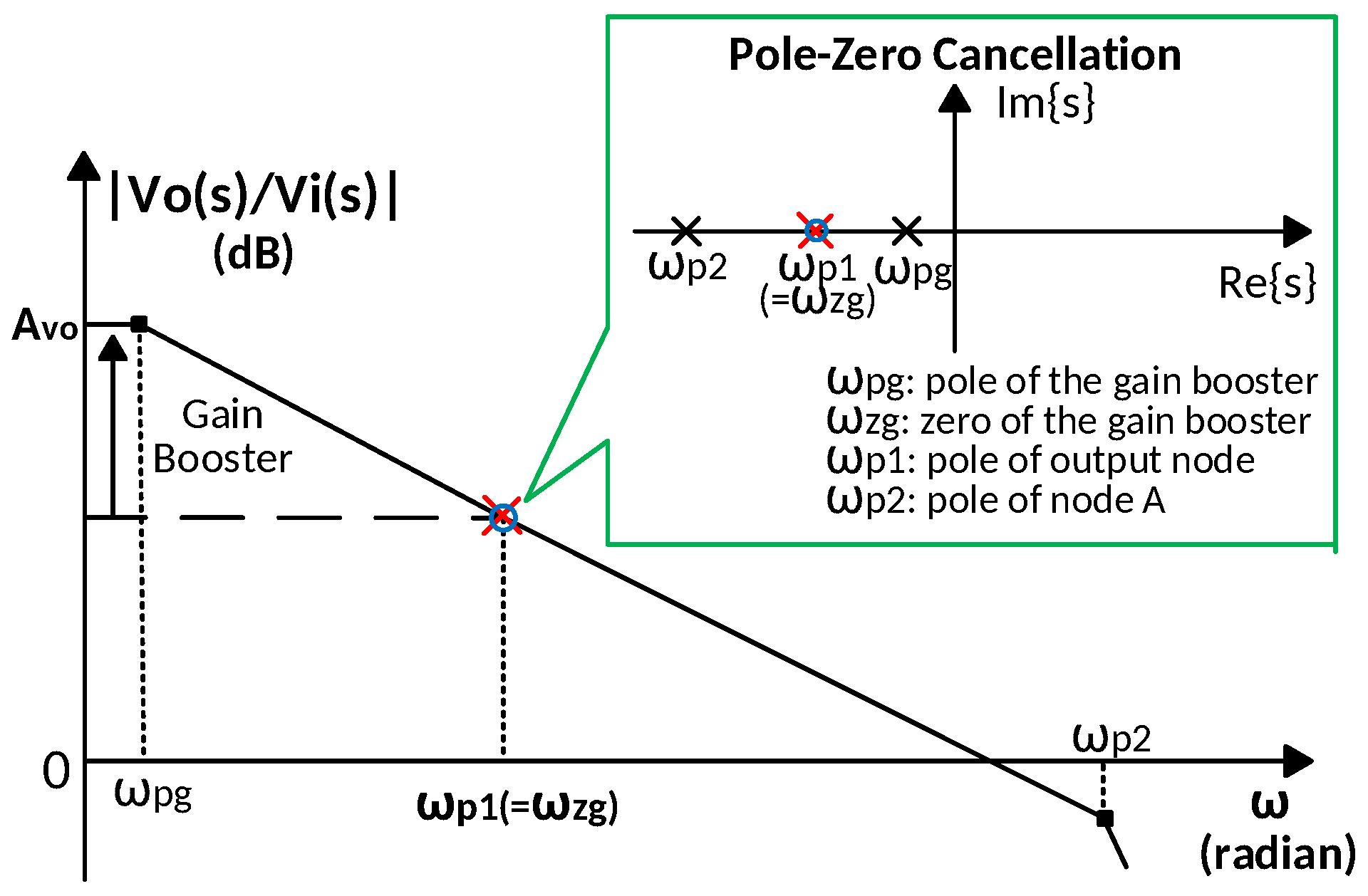
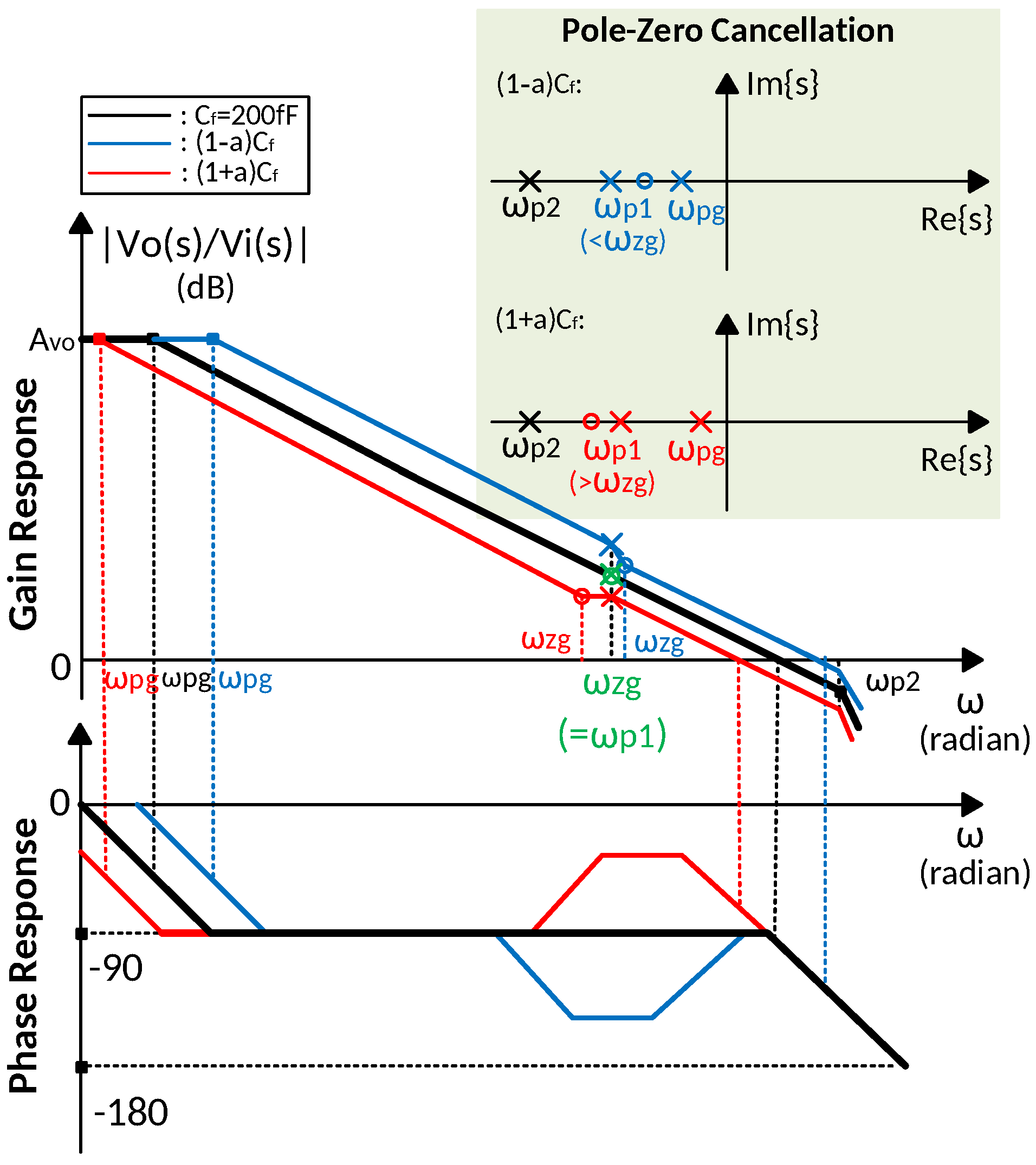
Figure 3 illustrates the frequency response of the proposed amplifier. The DC gain is boosted by
. The gain booster not only increases the DC gain of the main amplifier, but also moves the dominant pole from
to
, which is independent of
, as shown in Equation (
19). However, the extra pole from the gain booster output node reduces the overall phase margin. The Miller compensation by
and
in the gain booster alleviates this problem. The zero of the gain booster
is designed to cancel the output node pole,
, by choosing a suitable
and
. The pole-zero cancellation enable the proposed work to drive a wide range of load capacitance. The compensation capacitor size comparison between the pseudo single-stage (PSS) amplifier amplifier and this work is given in
Table 1. Compared to a PSS amplifier, by taking advantage of Miller compensation, the proposed amplifier reduces the compensation capacitor size by ten times while providing the same DC gain and unity gain bandwidth (UGBW).
The stability of the operational amplifier is dominated by its phase margin, which is the difference between the phase and 180
at the unity-gain cut-off frequency. For a two-pole system, assuming poles are widely spread, its phase margin (PM) is given as
where the
and the
are the dominant and second pole respectively, the
is the unity gain frequency. For the proposed work, the phase margin is primarily determined by the pole from the node A,
, as shown in (21), which is not affected by the load capacitance
. The capacitance at node A is much smaller than the compensation capacitance and load capacitance. The gain booster and
raise the second pole location from
to
where
is approximately but less than
and
is designed to be much larger than
and
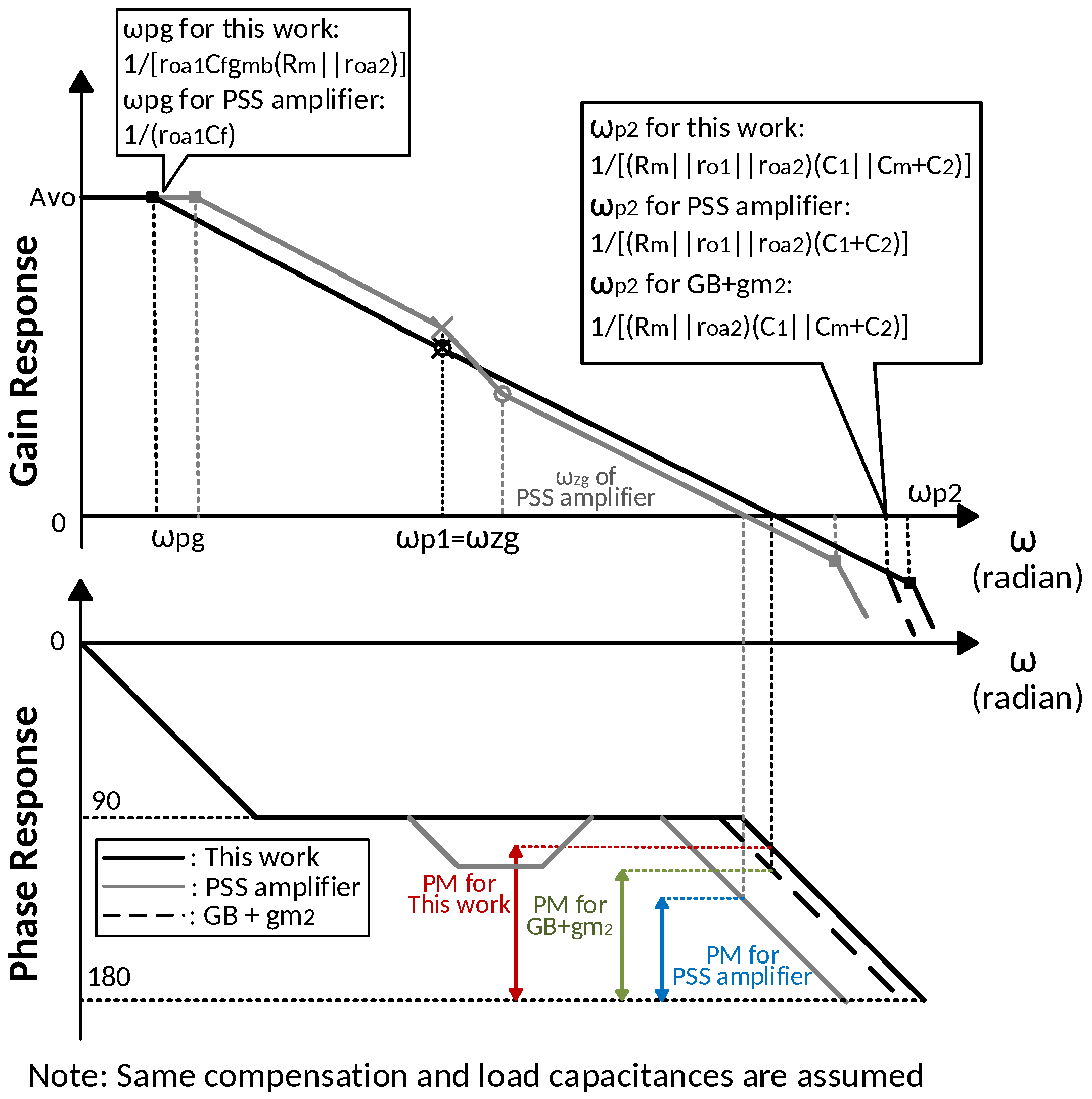
. Then the ratio between the second pole and the unity gain frequency is increased, which broadens the phase margin. Compared to the design without
, the proposed amplifier moves
higher from
to
. The comparison about frequency response bode plots among this work, the PSS amplifier [
42] and the design without
is shown in
Figure 4. With same compensation and load capacitance, this work achieves a larger phase margin and wider unity gain bandwidth.
While the two-stage amplifier implementing conventional Miller compensation has a second pole determined by the load capacitance, as shown in Equation (4), the dominant and second pole of this work. which are shown in Equations (19) and (21), are both independent of the load capacitance. As a result, this work can maintain a sufficient phase margin with various load capacitance, and this frequency compensation topology is less sensitive to the load capacitance compared to the conventional Miller compensation.
5. Simulation Results and Discussion
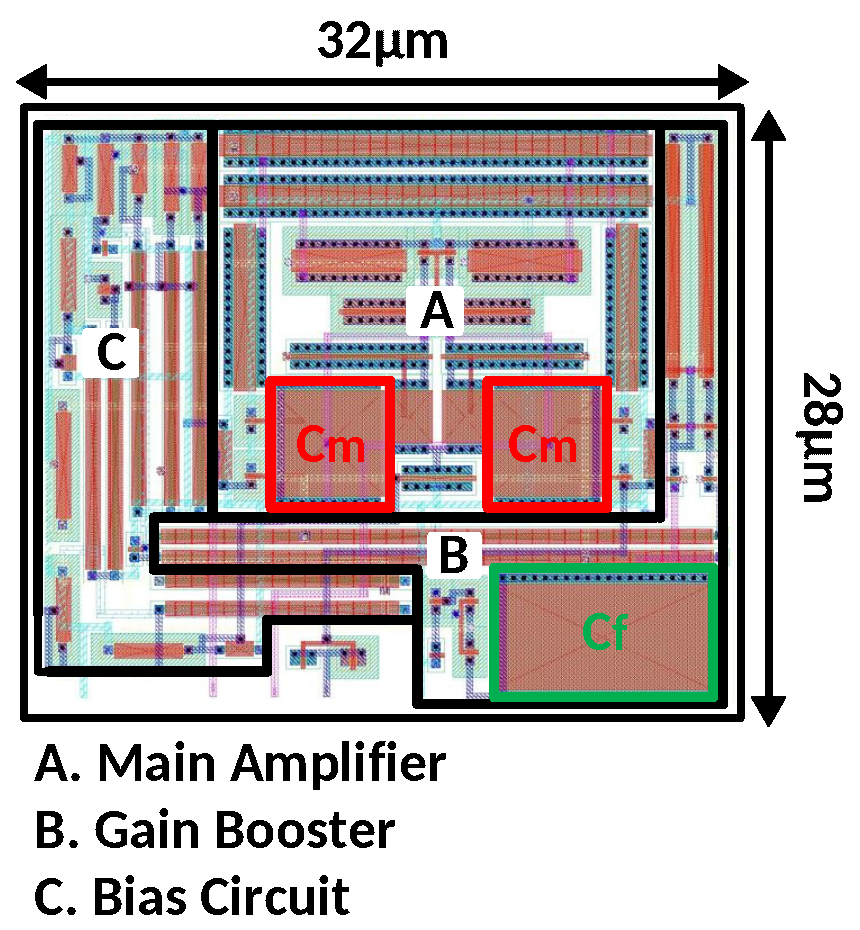
The proposed amplifier is designed using a 130-nm CMOS technology with a total area of 0.00090
. Its layout is shown in
Figure 8. The proposed amplifier without bias circuit occupies 0.00073-
chip area. The total stability compensation area is 100
m
.
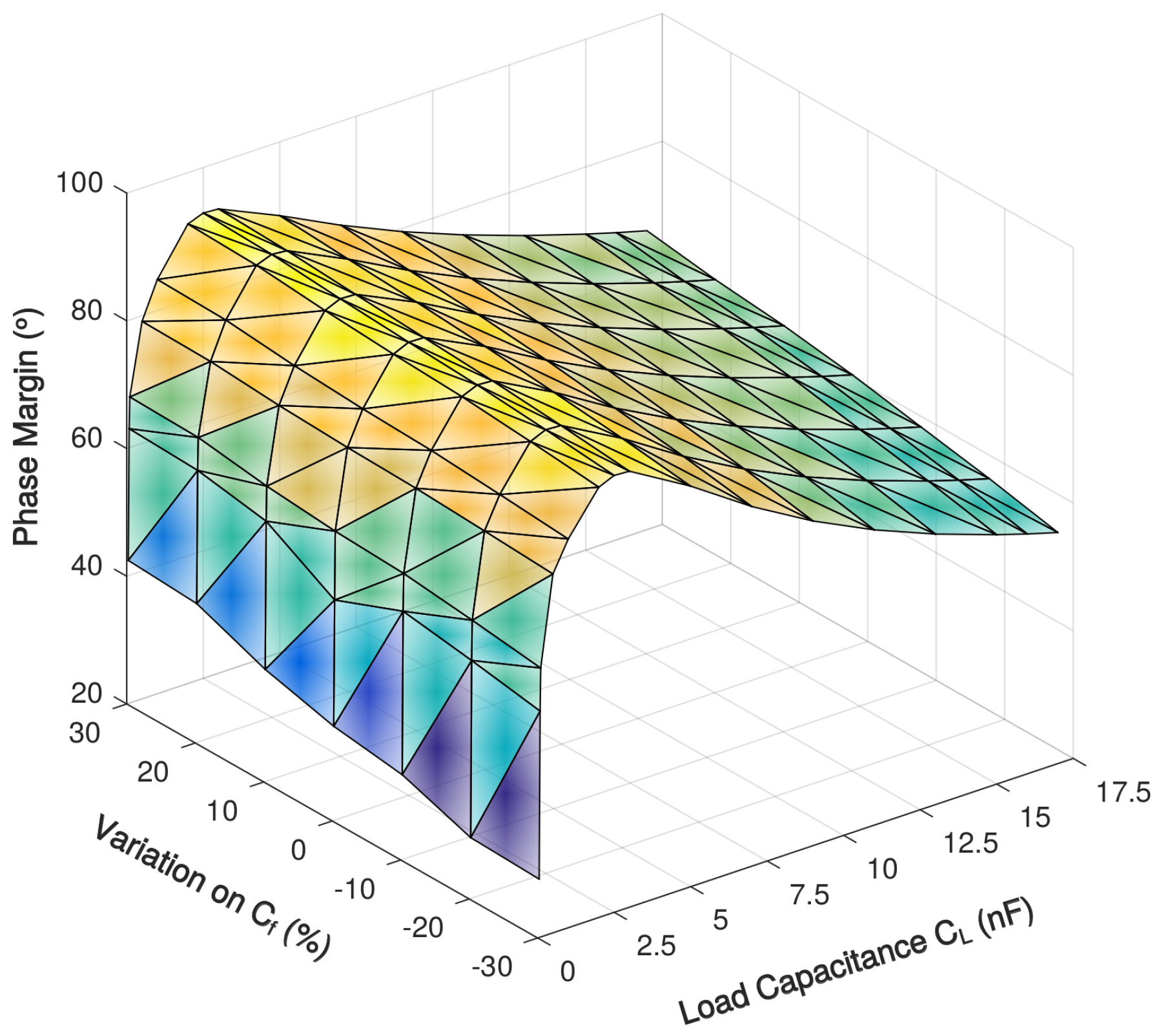
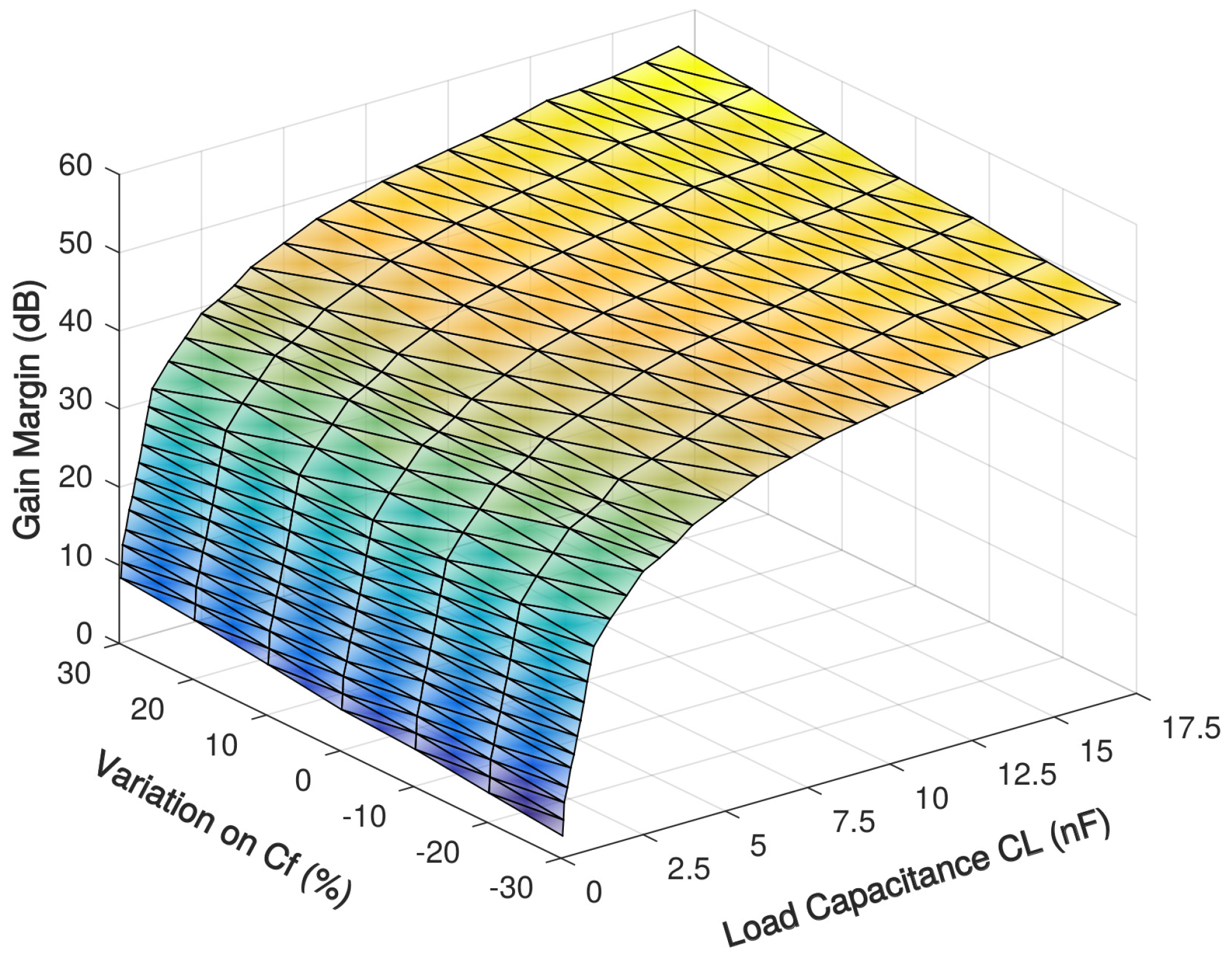
The stability simulation with 0.05–17 nF load capacitance over Miller compensation capacitances variations are shown in
Figure 9 and
Figure 10 and
Table 4 and
Table 5. For the prototype amplifier, the maximum phase margin is achieved when load capacitance
is 2.5 nF, which is 91
. The phase margin larger than 70
with a load capacitance of 0.2–12 nF and it becomes less than 65
when the load capacitance exceeds the 0.1–15-nF range. With the 30% variation on Miller compensation capacitance, the largest change in phase margin is less than 8% and demonstrates a good tolerance on process variation.
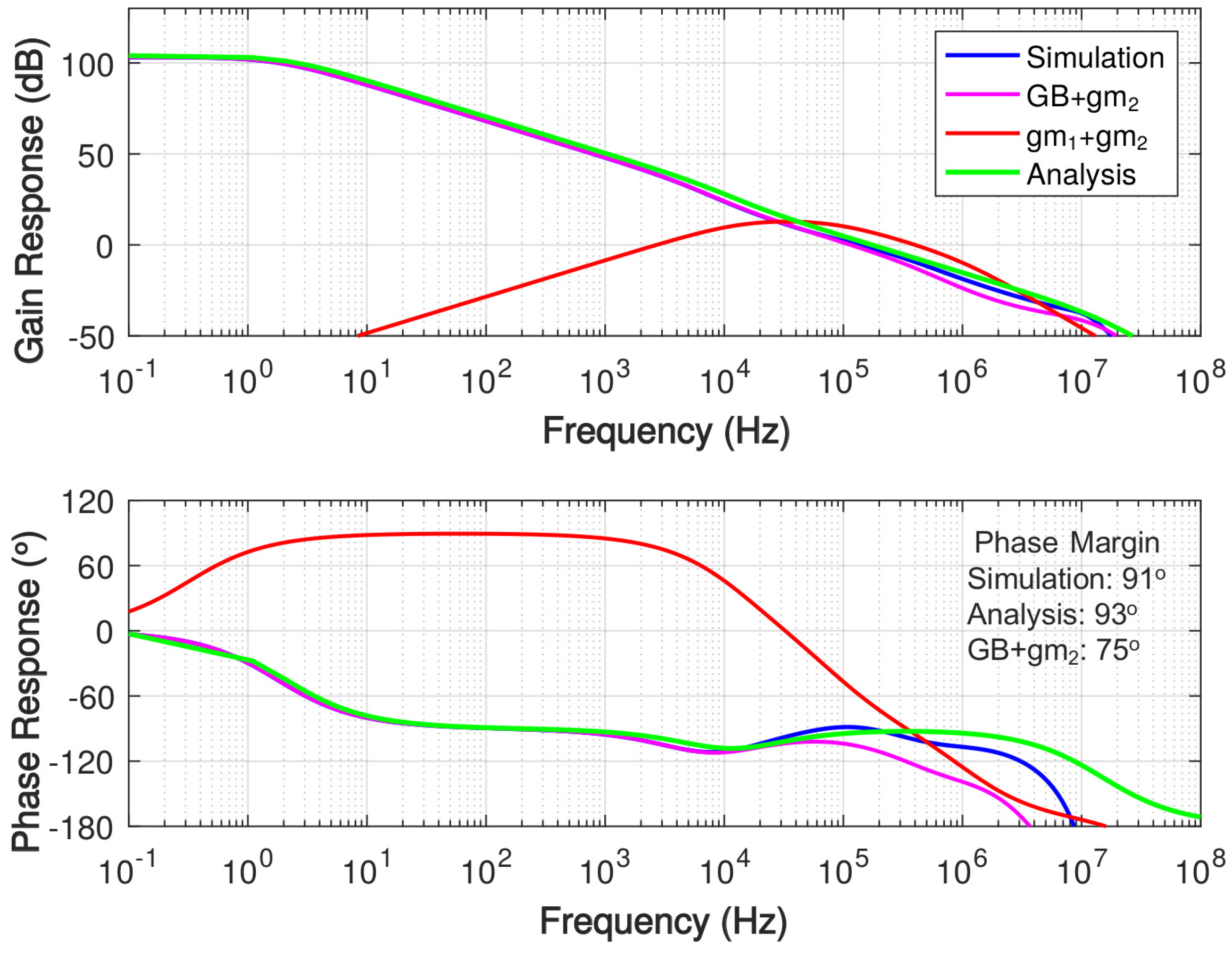
The simulated frequency response with a 2.5-nF load capacitance is shown in
Figure 11, demonstrating 130-kHz unity-gain frequency and over 100-dB gain at DC. The frequency response of the amplifier without the gain booster is separately simulated, which is labeled as
, showing a significant DC gain drop as expected from the AC coupling between
and
. In addition, the frequency response of the amplifier without the first stage of the main amplifier (
) is also simulated, which is labeled as GB +
, showing 16
degradation in the phase margin. It also shows that the first stage transconductance allows the overall amplifier to provide a sufficient gain at the frequencies higher than 50 kHz.
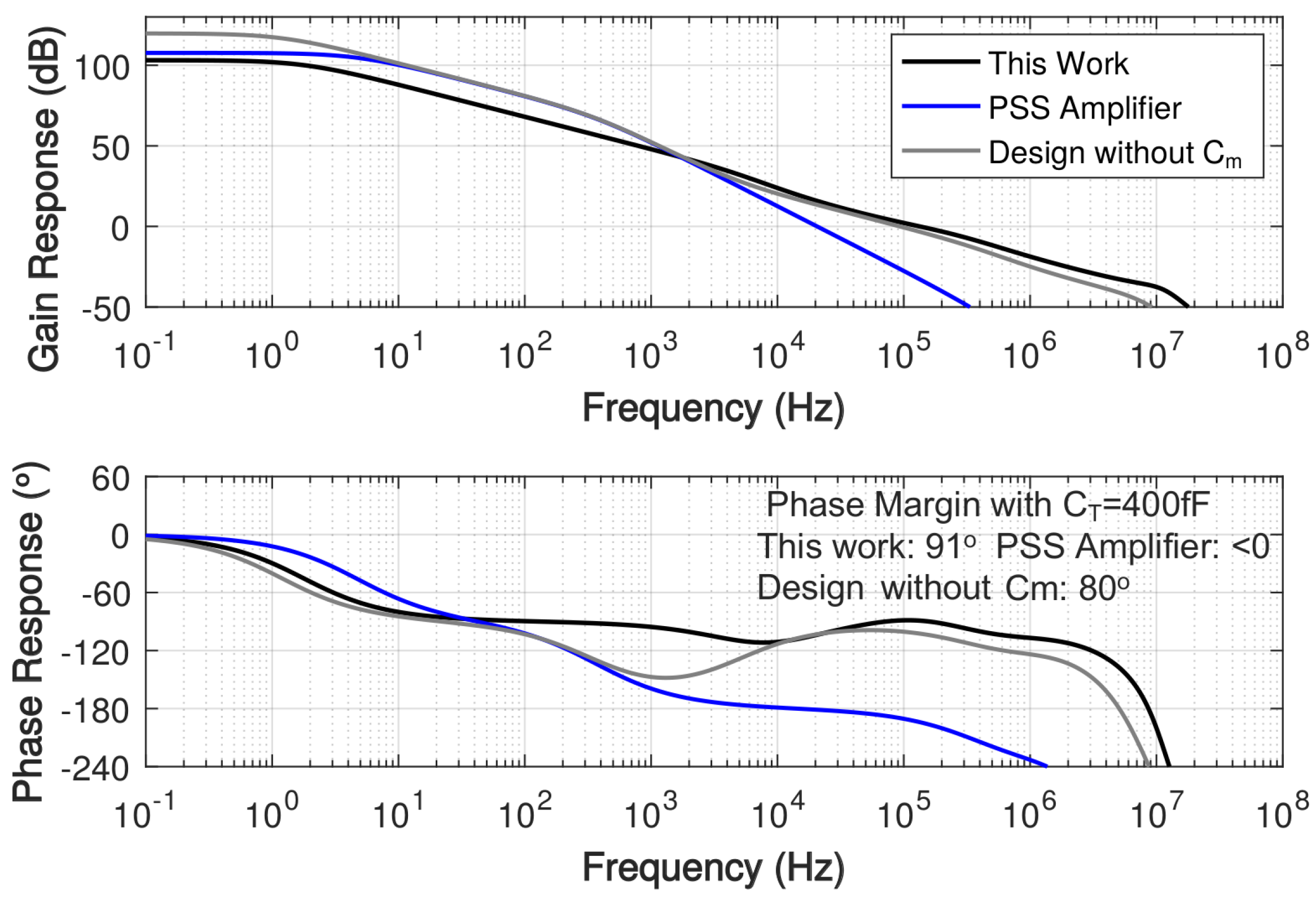
Figure 12 shows the comparison of simulated frequency response among this work, the pseudo single-stage (PSS) amplifier and the design without
using total compensation capacitance of 400-fF. Because the 400-fF compensation capacitance is far from sufficient for the PSS amplifier to implement pole-zero cancellation, its phase margin is degenerated severely.
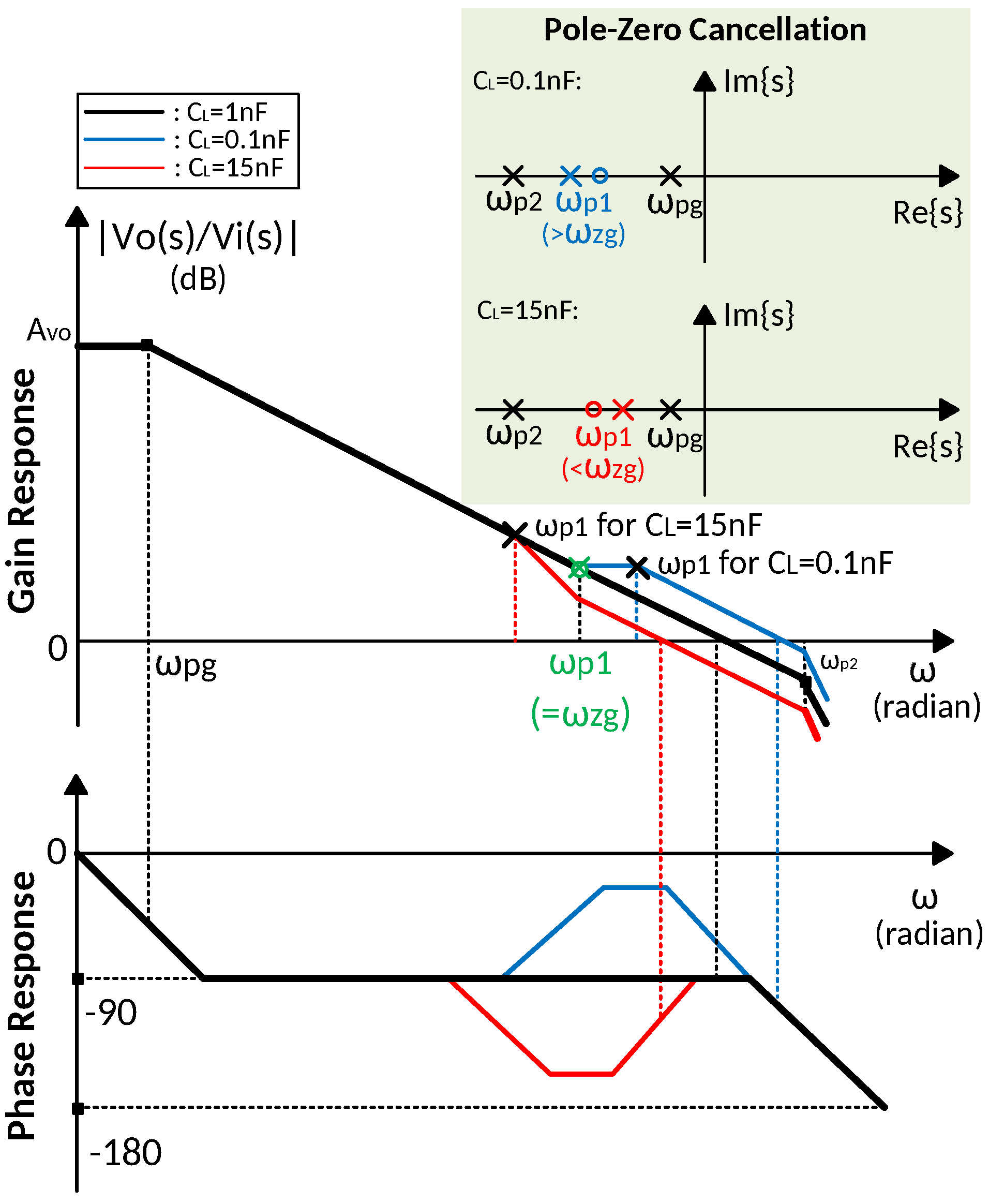
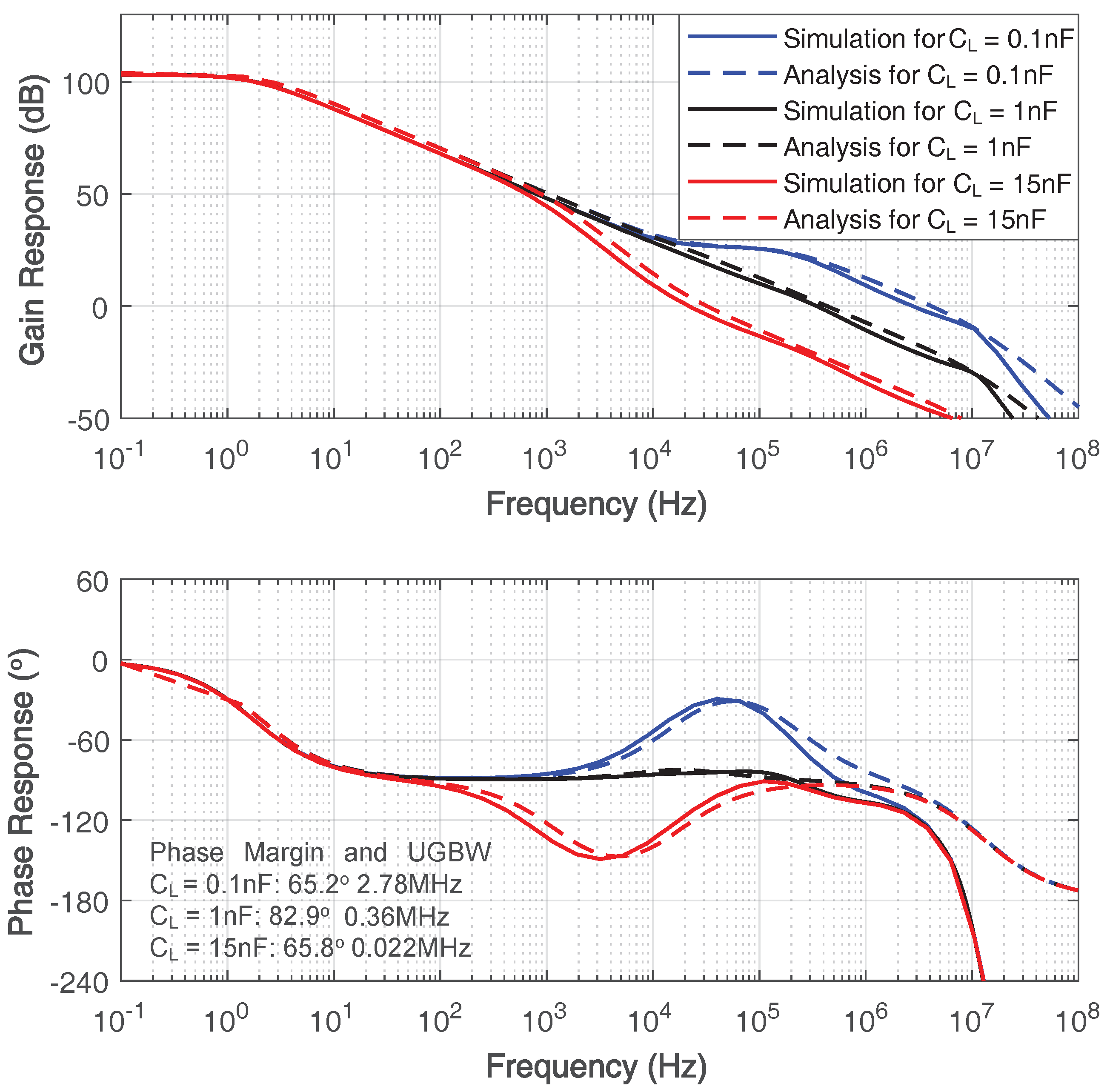
Figure 13 illustrates the simulated frequency response of the proposed amplifier with 0.1-nF, 1-nF and 15-nF load capacitances, respectively. The precise pole-zero cancellation occurs when load capacitance is 1 nF. The frequency response for 0.1-nF load capacitance shows that the pole of the gain booster,
is lower than the output node pole
, while
is higher than
when load capacitance is 15 nF. The broken pole-zero cancellation reflected in
Figure 13 accords with the analysis in previous section.
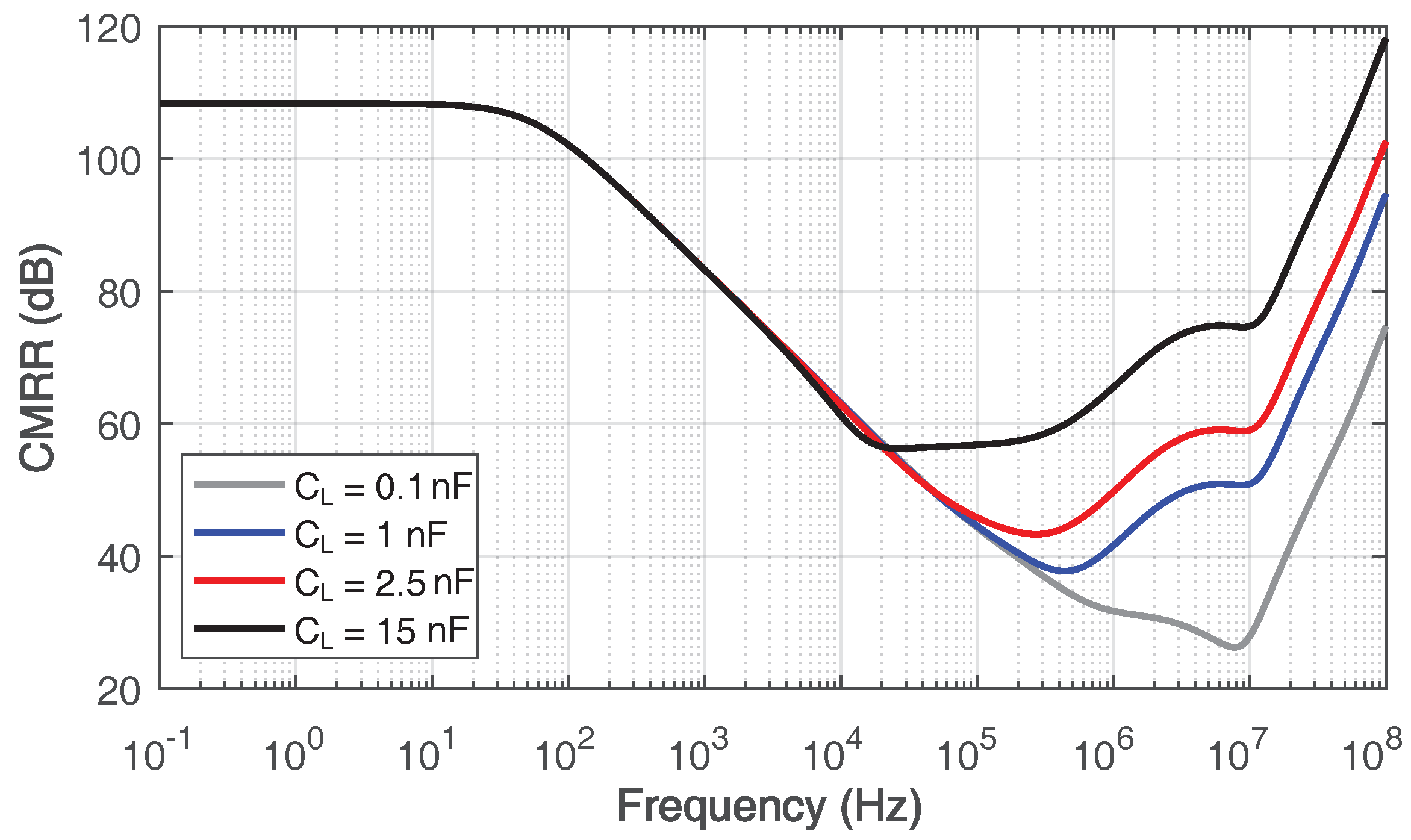
The simulated common-mode rejection ratio (CMRR) is given in
Figure 14, which is 109 dB at DC. At low frequency, the high CMRR is mainly contributed by the first stage of the gain booster, which is a differential composite cascode amplifier, since the first and second stage of the main amplifier are AC coupled by
. With the increase of frequency, the first stage of the main amplifier begins to make a difference to the CMRR. Owing to this, the proposed work obtains a sufficient CMRR at high frequency.
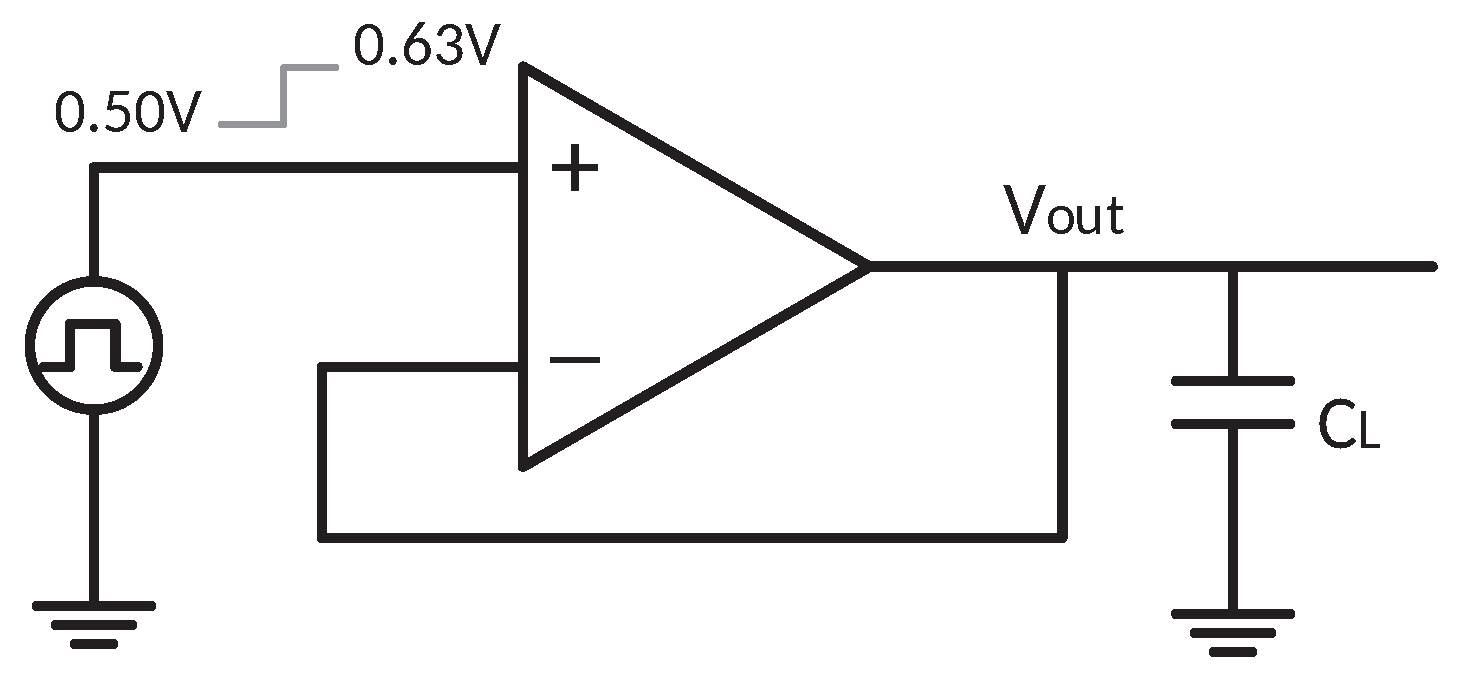
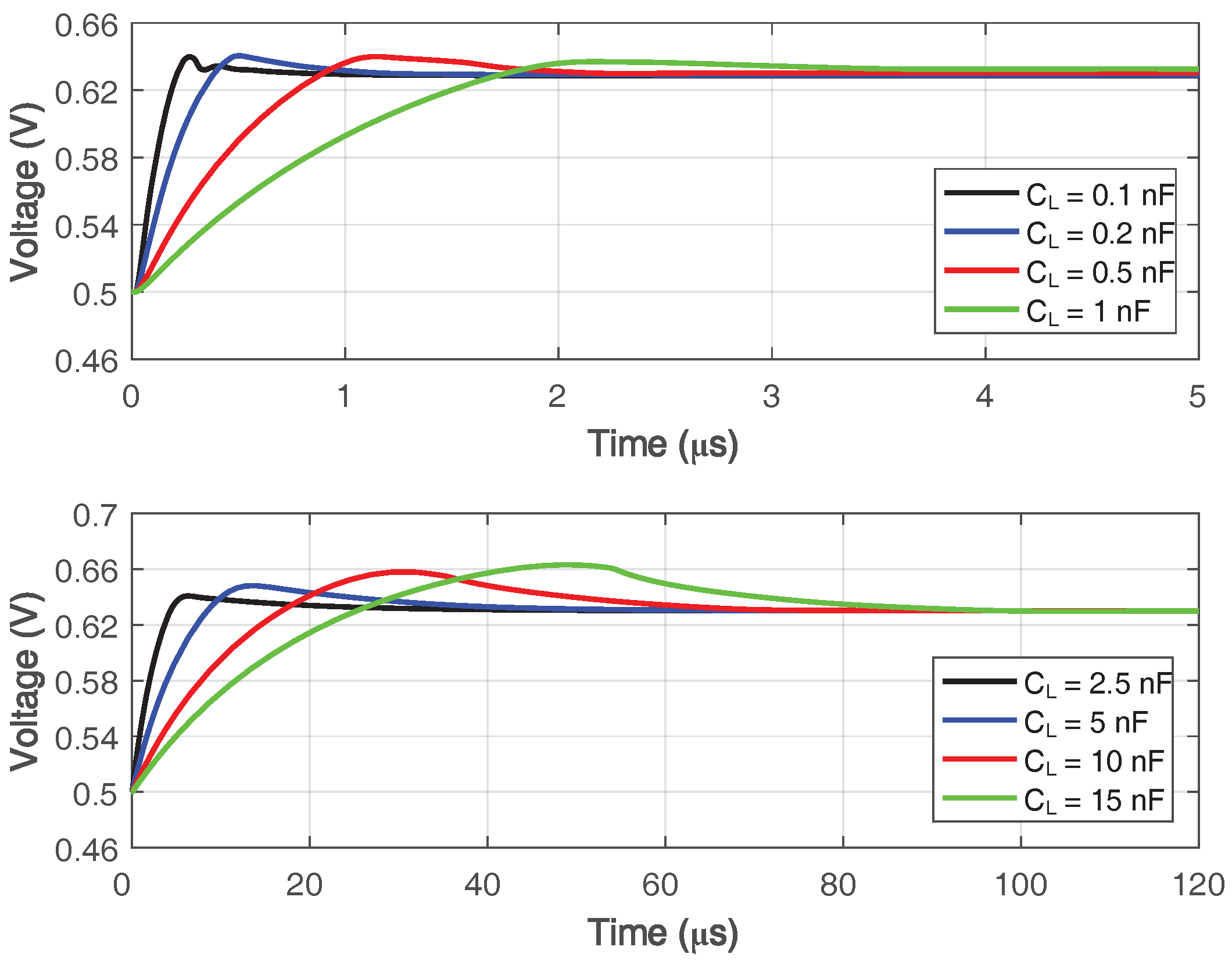
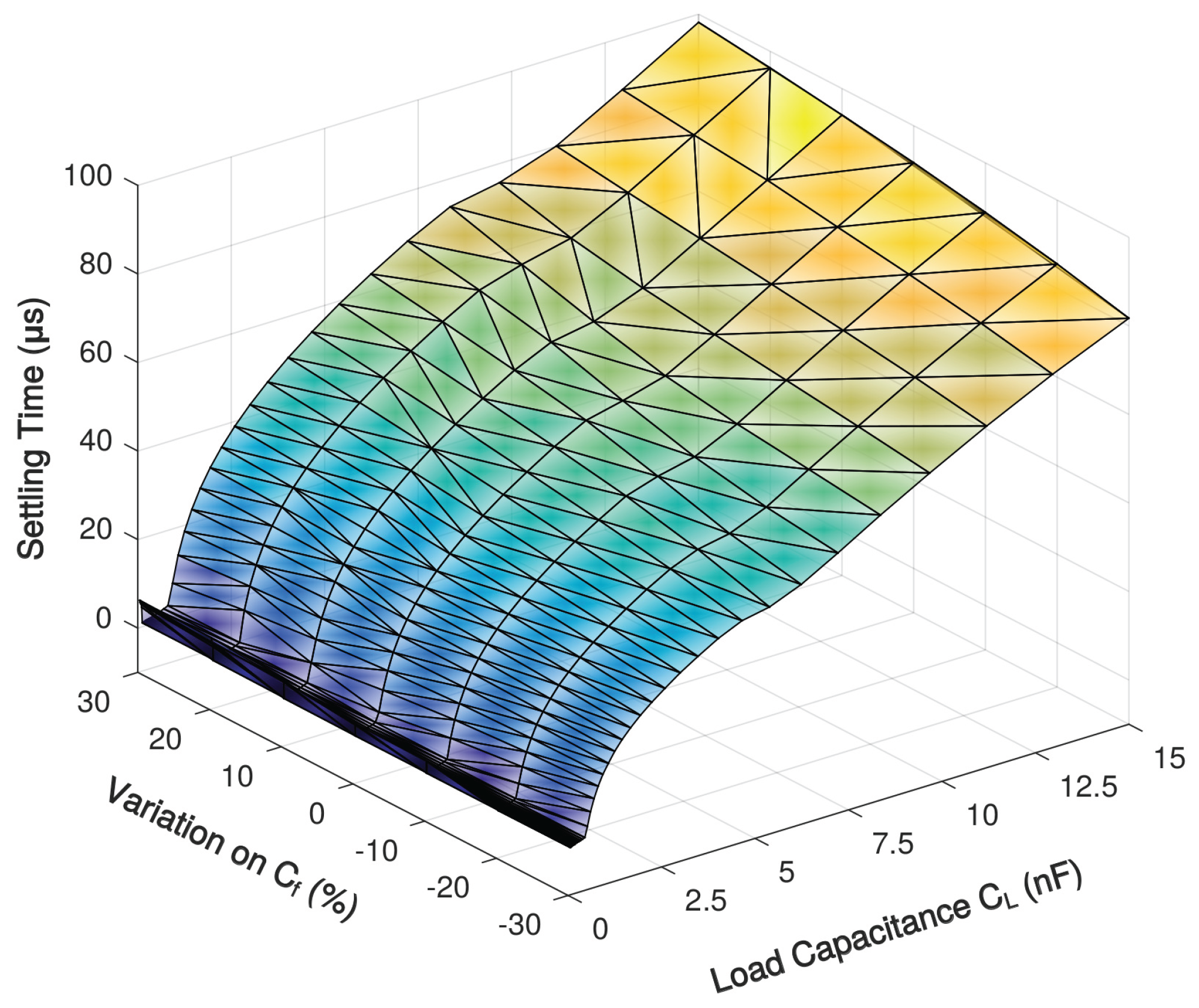
Under a transient simulation setup illustrated in
Figure 15, a step response simulation with various load capacitance is shown in
Figure 16, and the simulated 1% settling time with variation on Miller compensation capacitor
is shown in
Figure 17. The 1% settling time is damaged due to exceeding-80
phase margin when driving 1–7-nF load capacitance. With the diminution of
, the phase margin decreases, then the 1% settling time is improved.
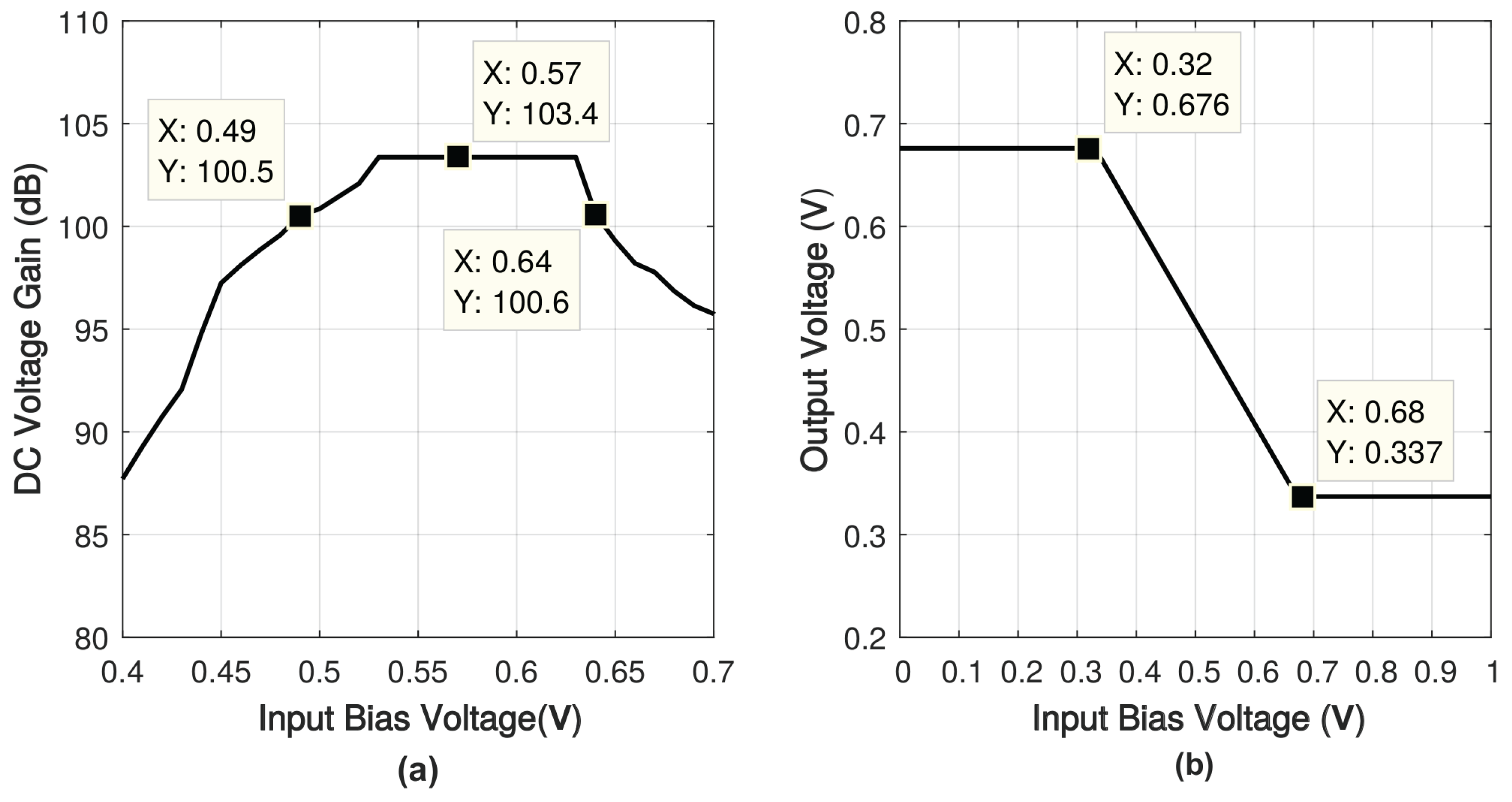
The input common-mode range (ICMR) and output swing of the proposed amplifier are shown in
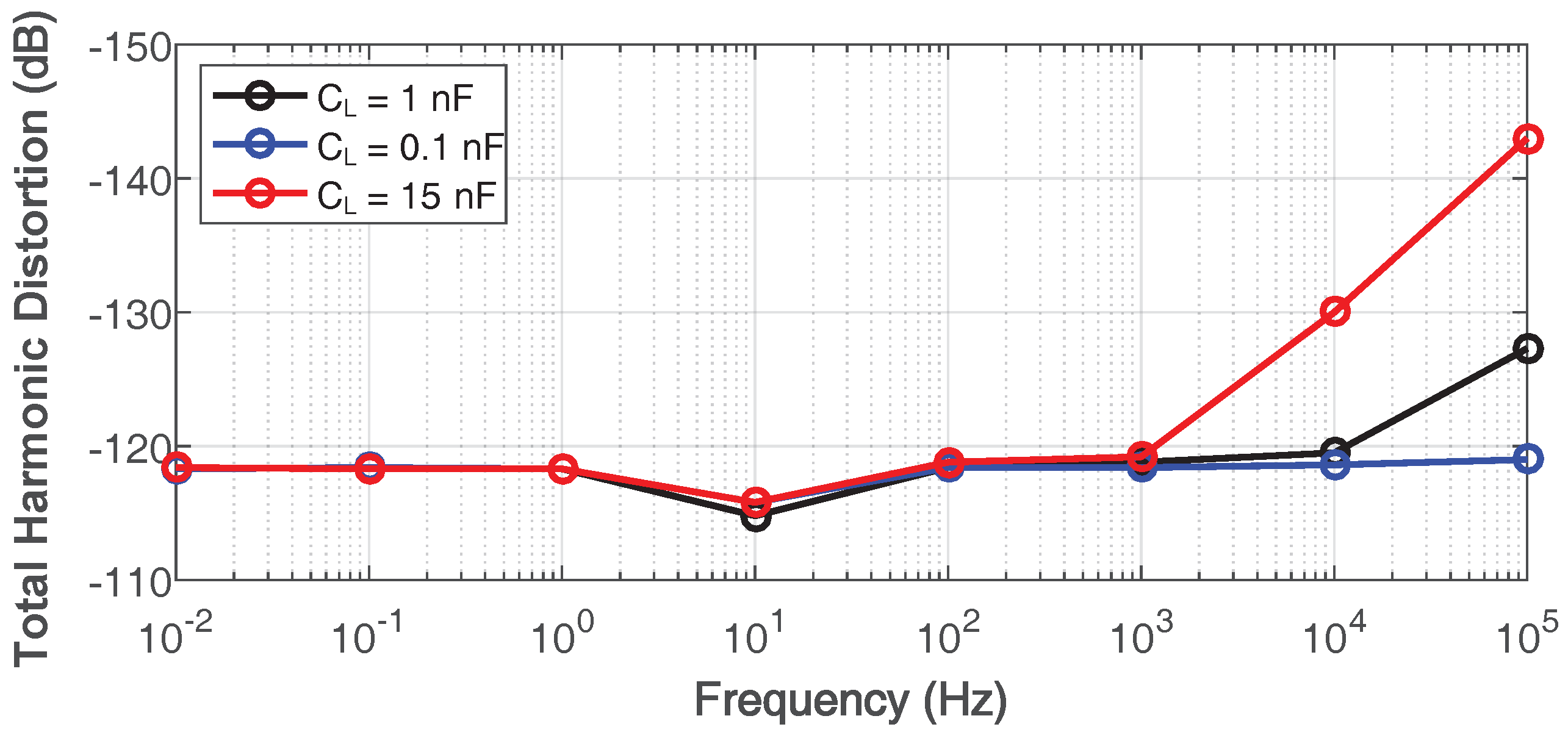
Figure 18. The input common range is from 0.49 V to 0.64 V, and the output bias voltage swings between 0.34 V and 0.68 V. Considering that the Class-B output stage may cause the distortion of output signal, the simulated total harmonic distortion (THD) with 40-mVpp differential input when load capacitance is 0.1 nF, 1 nF and 15 nF is shown in
Figure 19. The largest total harmonic distortion is −114 dB, while the DC voltage gain is 103 dB.
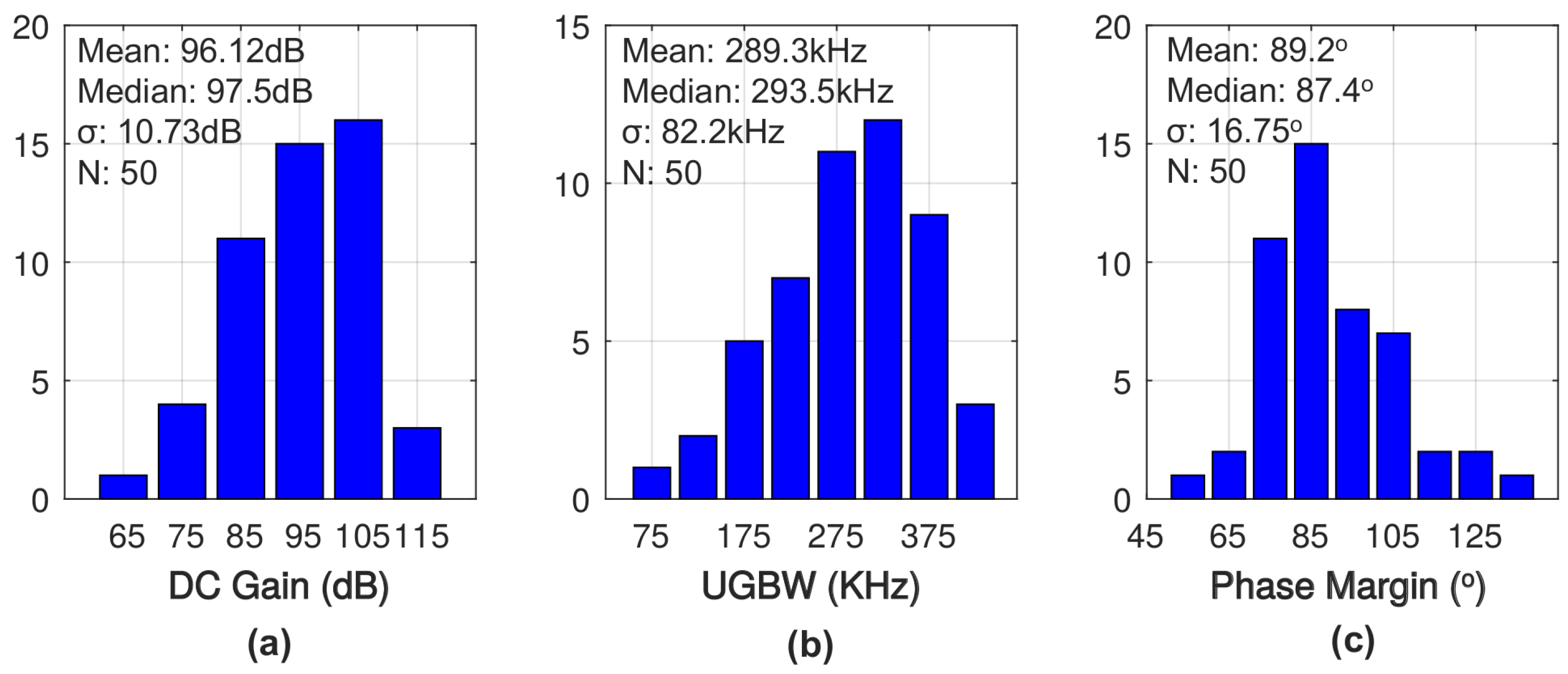
Monte Carlo simulations with 50 samples for DC gain, unity gain bandwidth and phase margin with 1-nF load capacitance are shown in
Figure 20. The median performance of 97.5-dB gain, 293.5-kHz unity gain frequency, and 87.4
phase margin is obtained with a standard deviation of 10.7 dB, 82.2 kHz, and 16.8
. Considering the limited number of samples, the median performance of the Monte Carlo simulation well matches the simulation results with typical case model.
Figure 20c shows that the prototype remains stable with 2
variation. In addition, the corner simulation performed with one
process variation presents 110.3-dB gain, 329.9-kHz unity gain bandwidth and 82
phase margin at high side and 95.5-dB gain, 227.3-kHz unity gain band width and 93
phase margin at low side, which also matches the statistical distributions from the Monte Carlo simulation.
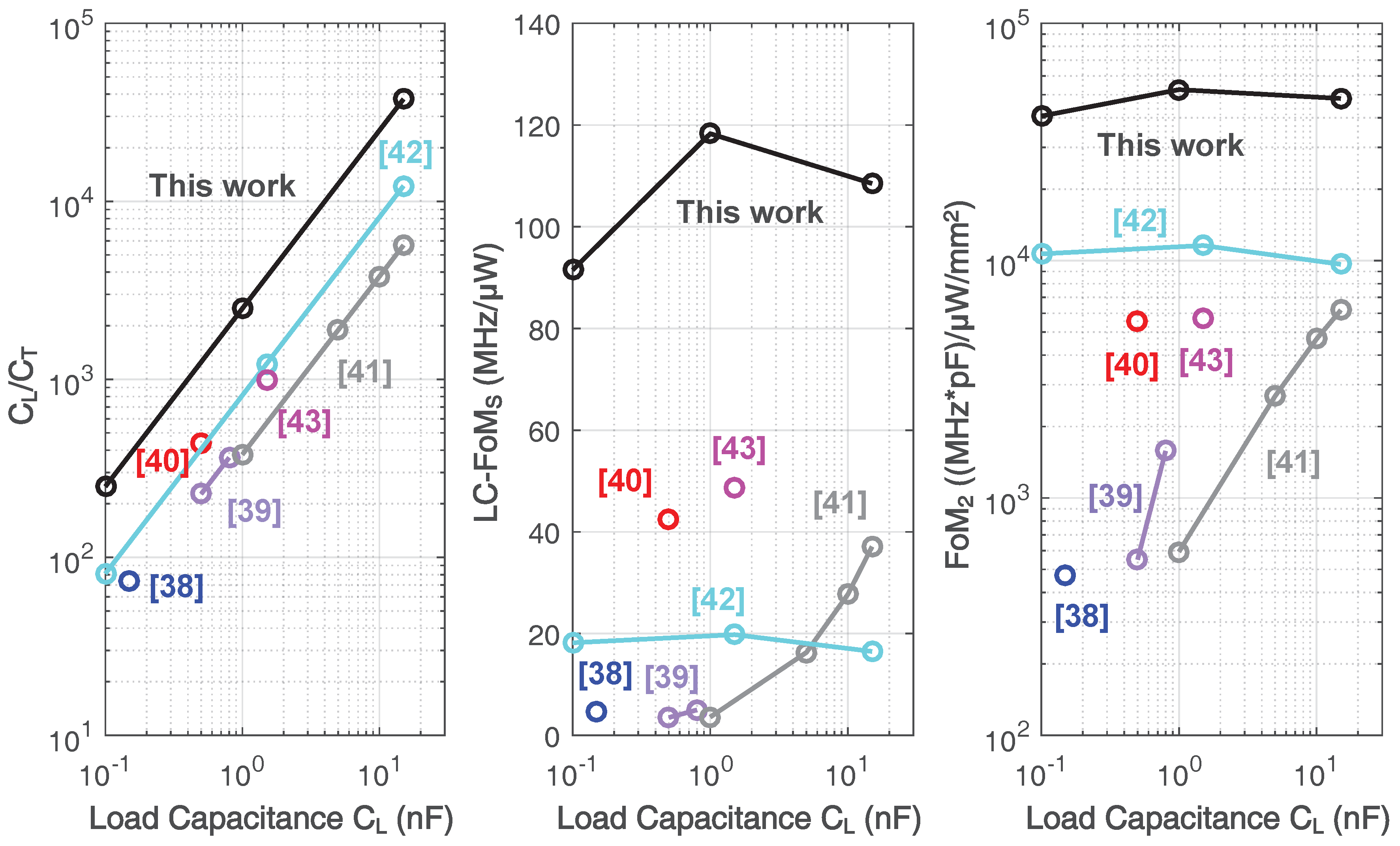
Table 6 compares the simulated performance of the prototype design with the state-of-the-art. Compared to previous works, this work utilizes the smallest compensation capacitance, which is 400 fF, and demonstrates the highest ratio between load capacitance and total compensation capacitance, which is 37,500. In addition, it also presents the best reported performance trade-off on the unity gain bandwidth, load capacitance, and power consumption for a given chip area, as shown in
Figure 21.

























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}