Study of the Integration of the CNU-TS-1 Mobile Tunnel Monitoring System


Abstract
:1. Introduction
- (1)
- Rotate the point clouds of the tunnel to make them parallel to a certain coordinate axis and then cut the cross-section by the coordinate axis [16].
- (2)
- Project the three-dimensional point clouds to the horizontal plane and convert them into a two-value image. The image is used to extract the central axis of the tunnel from the horizontal plane, and then the later rigorous correction algorithms are adopted to obtain the cross-sections [17].
- (3)
- The point clouds of the tunnel are projected onto two planes. Then, the spatial central axis of the tunnel is extracted by the fine mathematical method and used to cut the cross-sections [18].
- (4)
- The cross-sections are extracted by the design spatial central axis of the tunnel directly [19].
2. System Integration
2.1. Hardware Integration Scheme
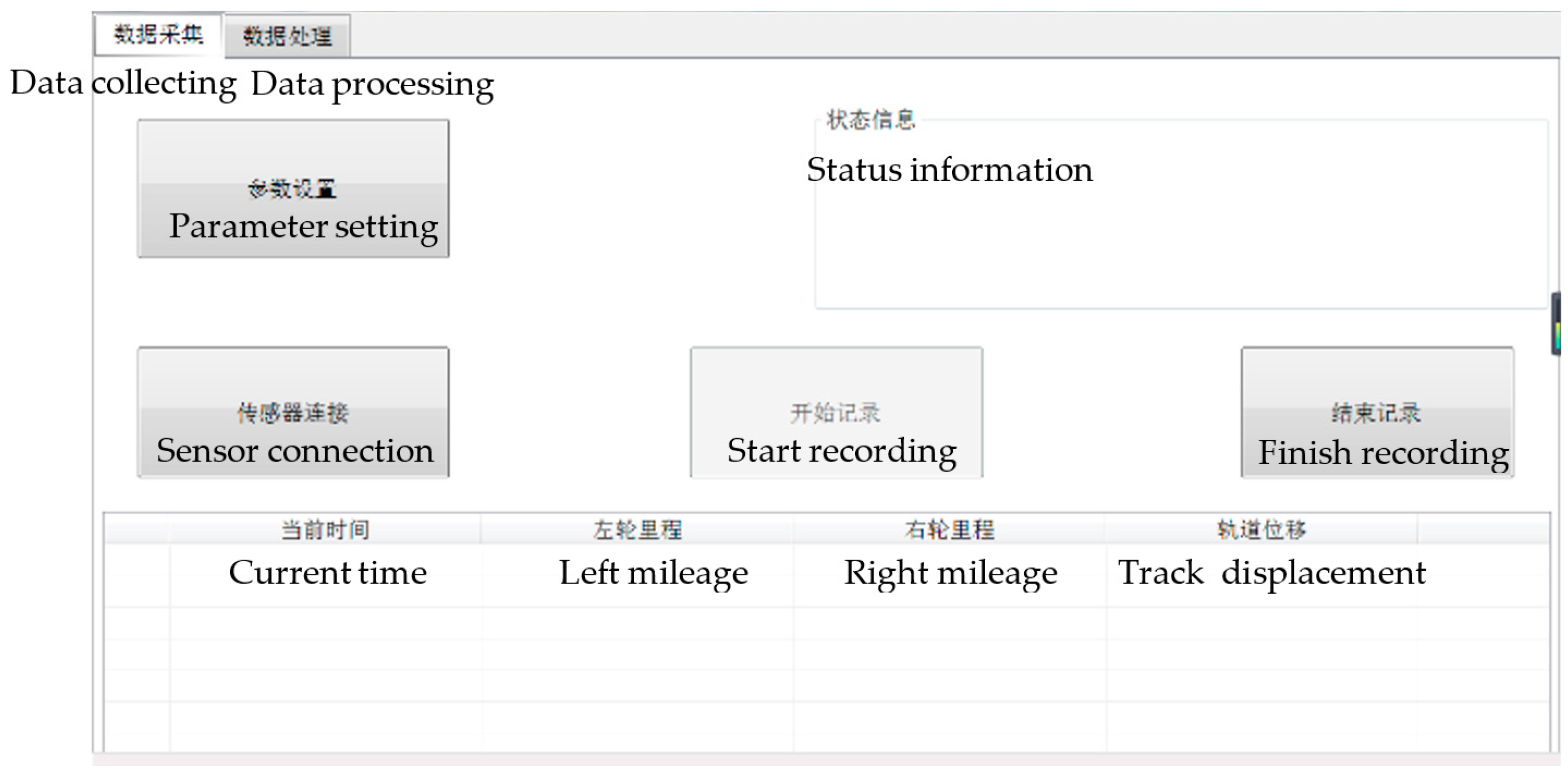
2.2. Software Design and Implementation
3. Methods
3.1. Accuracy Verification Method of TS1
3.1.1. External Coincidence Accuracy Verification Method
3.1.2. Internal Coincidence Accuracy Verification Method
3.2. Calculation Method of Cross-Section Mileage Based on Absolute Coordinates
4. Experimental Validation and Discussion
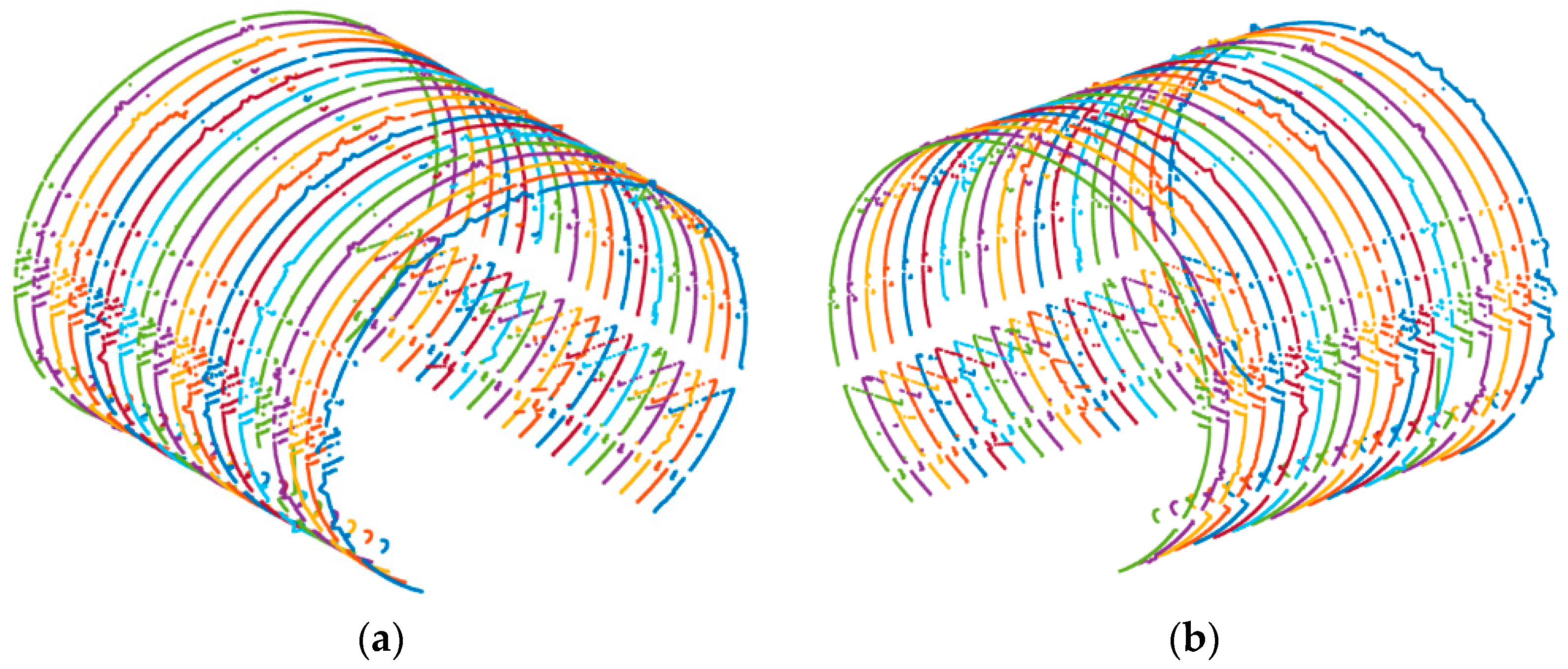
4.1. Data Accquisition
4.2. Accuracy Verification
4.2.1. External Coincidence Accuracy Verification of the System
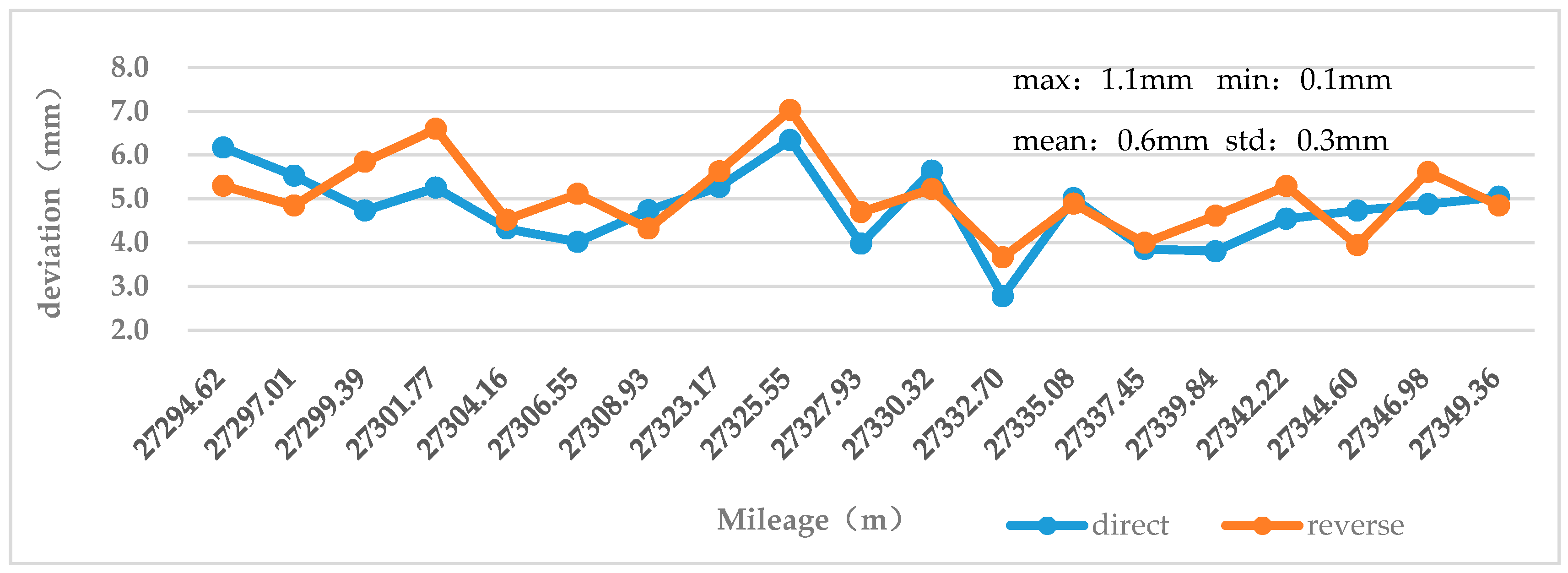
4.2.2. Internal Coincidence Accuracy Verification of the System
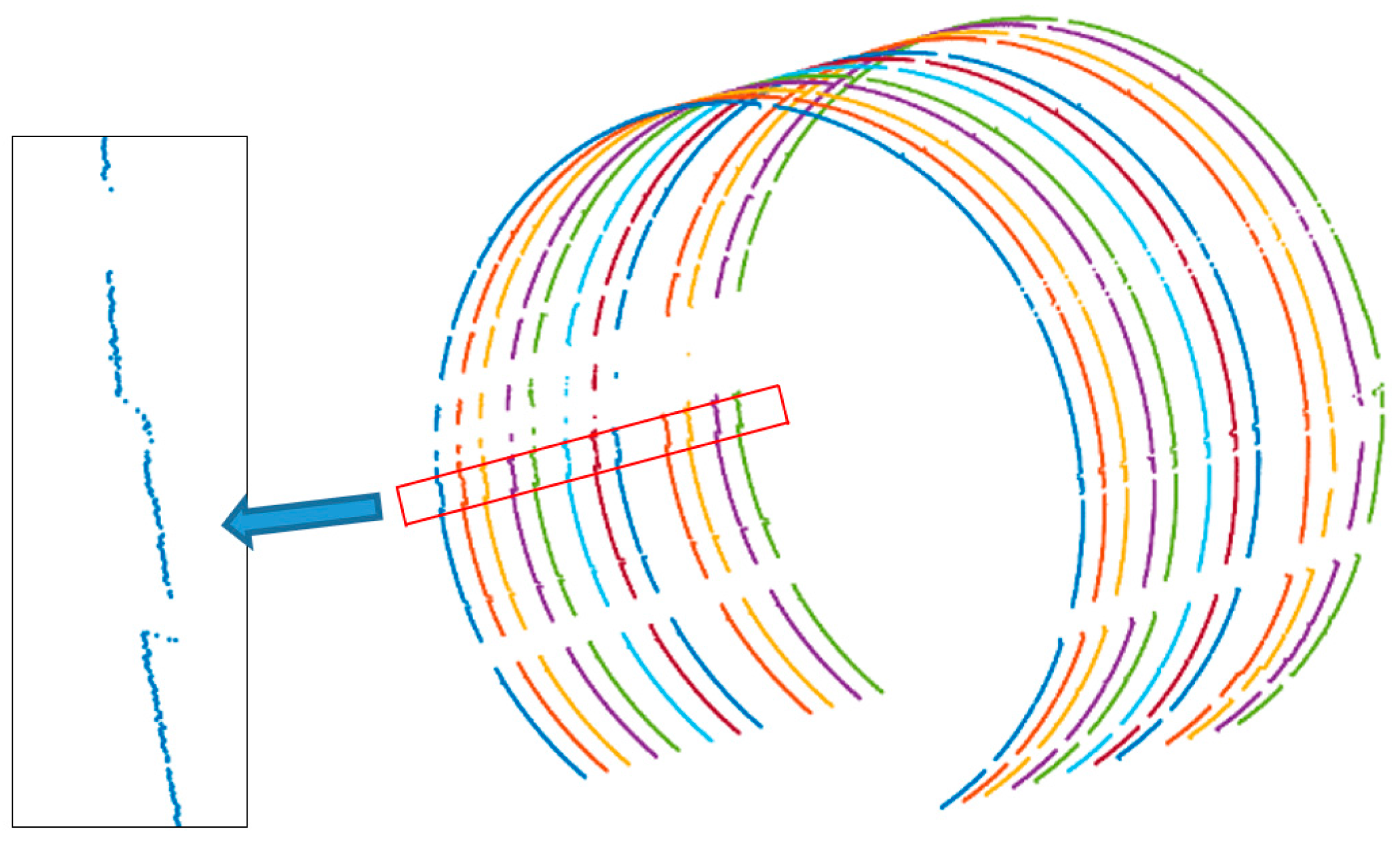
4.2.3. Accuracy Verification of the Simulated Deformation Method
5. Discussion
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Wang, T.T.; Jaw, J.J.; Chang, Y.H.; Jeng, F.S. Application and validation of profile–image method for measuring deformation of tunnel wall. Tunn. Undergr. Space Technol. 2009, 24, 136–147. [Google Scholar] [CrossRef]
- Olsen, W.S.; Adams, R.M. A Laser Profilometer. J. Geophys. Res. 1970, 75, 2185–2187. [Google Scholar] [CrossRef]
- Monserrat, O.; Crosetto, M. Deformation measurement using terrestrial laser scanning data and least squsres 3D surface matching. ISPRS J. Photogramm. Remote Sens. 2008, 63, 142–154. [Google Scholar] [CrossRef]
- Han, J.Y.; Guo, J.; Jiang, Y.S. Monitoring tunnel profile by means of multi-epoch dispersed 3-D LiDAR point clouds. Tunn. Undergr. Space Technol. 2013, 33, 186–192. [Google Scholar] [CrossRef]
- Kukko, A.; Kaartinen, H.; Hyyppä, J.; Chen, Y. Multiplatform Mobile Laser Scanning: Usability and Performance. Sensors 2012, 12, 11712–11733. [Google Scholar] [CrossRef]
- Arastounia, M. Automated As-Built Model Generation of Subway Tunnels from Mobile LiDAR Data. Sensors 2016, 16. [Google Scholar] [CrossRef] [PubMed]
- Vaaja, M.; Hyypp, J.; Kukko, A.; Kaartinen, H.; Hyypp, H.; Alho, P. Mapping Topography Changes and Elevation Accuracies Using a Mobile Laser Scanner. Remote Sens. 2011, 3, 587–600. [Google Scholar] [CrossRef]
- Brochure_GRPSystemFX_en. Available online: http://www.ambergtechnologies.ch/cn/products/rail-surveying/sensors/grp-3000/ (accessed on 26 December 2017).
- SiTrack One Mobile Orbit Measurement System. Available online: http://www.pclcn.org/study/shownews.php?lang=cn&id=486 (accessed on 26 December 2017).
- Chen, X. Study on Error Analysis and Correction of Tunnel Space. Master’s Thesis, Shanghai University of Engineering Science, Shanghai, China, 2016. [Google Scholar]
- Wang, X. Study on Tunnel Dynamic Deformation Detection and Analysis System. Master’s Thesis, Beijing Jiao tong University, Beijing, China, 2016. [Google Scholar]
- Yoon, J.S.; Sagong, M.; Lee, J.S.; Lee, K.S. Feature extraction of a concrete tunnel liner from 3D laser scanning data. NDT Int. 2009, 42, 97–105. [Google Scholar] [CrossRef]
- Puente, I.; Akinci, B.; González-Jorge, H.; Díaz-Vilariño, L.; Arias, P. A semi-automated method for extracting vertical clearance and cross sections in tunnels using mobile LiDAR data. Tunn. Undergr. Space Technol. 2016, 59, 48–54. [Google Scholar] [CrossRef]
- Fekete, S.; Diederichs, M.; Lato, M. Geotechnical and operational applications for 3-dimensional laser scanning in drill and blast tunnels. Tunn. Undergr. Space Technol. 2010, 25, 614–628. [Google Scholar] [CrossRef]
- Pock, T.; Beichel, R.; Bischof, H. A novel robust tube detection filter for 3D centreline extraction. Lect. Notes Comput. Sci. 2005, 3540, 55–94. [Google Scholar]
- Cheng, Y.; Qiu, W.; Lei, J. Automatic extraction of tunnel lining cross sections from terrestrial laser scanning point clouds. Sensors 2016, 16, 1648. [Google Scholar] [CrossRef] [PubMed]
- Han, S.; Cho, S.; Kim, S.; Jung, J.; Heo, J. Automated and efficient method for extraction of tunnel cross sections using terrestrial laser scanned data. J. Comput. Civ. Eng. 2013, 27, 274–281. [Google Scholar] [CrossRef]
- Kang, Z.; Zhang, L.; Tuo, L.; Wang, B.; Chen, J. Continuous extraction of subway tunnel cross sections based on terrestrial point clouds. Remote Sens. 2014, 6, 857–879. [Google Scholar] [CrossRef]
- Li, C.; Lu, X.; Zhu, N.; Lu, Y.; Wu, Y.; Li, G. Continuously extracting section and deformation analysis for subway tunnel based on LIDAR points. Acta Geod. ET Cartogr. Sin. 2015, 44, 1056–1062. [Google Scholar]
- Hong, S.; Park, I.; Lee, J.; Lim, K.; Choi, Y.; Sohn, H.G. Utilization of a Terrestrial Laser Scanner for the Calibration of Mobile Mapping Systems. Sensors 2017, 17. [Google Scholar] [CrossRef] [PubMed]
- Walton, G.; Delaloye, D.; Diederichs, M. Development of an elliptical fitting algorithm to improve change detection capabilities with applications for deformation monitoring in circular tunnels and shafts. Tunn. Undergr. Space Technol. 2014, 43, 336–349. [Google Scholar] [CrossRef]
- Rodríguez-Caballero, E.; Afana, A.; Chamizo, S.; Solé-Benet, A.; Canton, Y. A new adaptive method to filter terrestrial laser scanner point clouds using morphological filters and spectral information to conserve surface micro-topography. ISPRS J. Photogramm. Remote Sens. 2016, 117, 141–148. [Google Scholar]
- Du, L.; Zhong, R.; Sun, H.; Wu, Q. Automatic monitoring of tunnel deformation based on high density point clouds data. In Proceedings of the 2017 ISPRS Geospatial Week, Wuhan, China, 18–22 September 2017. [Google Scholar]
- Fischler, M.; Bolles, R. Random sample consensus: A paradigm for model fitting with applications to image analysis and automated cartography. ACM Commun. 1981, 24, 381–395. [Google Scholar] [CrossRef]
- Least Squares. Available online: https://en.wikipedia.org/wiki/Least_squares (accessed on 26 December 2017).
- Zhu, Y.; Song, Y. Tunnel Engineering, 2nd ed.; China Railway Press: Beijing, China, 2007; pp. 22–33. [Google Scholar]
- Study on the 3D Laser Scanning Technology for Tunnel Inspection. Available online: http://xueshu.baidu.com/s?wd=paperuri%3A%2882cdf26af3bc4d0e253b9dccef76618c%29&filter=sc_long_sign&tn=SE_xueshusource_2kduw22v&sc_vurl=http%3A%2F%2Fen.cnki.com.cn%2FArticle_en%2FCJFDTOTAL-GCKC201307011.htm&ie=utf-8&sc_us=4253910234057987610 (accessed on 26 December 2017).
- Chen, L.; Jin, Q. Engineering Surveying, 3rd ed.; Tongji University Press: Shanghai, China, 1990; pp. 127–146. [Google Scholar]
- A General Mathematical Model for Determination of Relationship Between Ground Points and Central Line of Highway. Available online: http://xueshu.baidu.com/s?wd=paperuri%3A%280467fa2d4d3d5538bb9d89f100d8d92a%29&filter=sc_long_sign&tn=SE_xueshusource_2kduw22v&sc_vurl=http%3A%2F%2Fwww.cqvip.com%2FMain%2FDetail.aspx%3Fid%3D21216211&ie=utf-8&sc_us=12558588712368635151 (accessed on 26 December 2017).












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Mileage | Total Station (m) | Direct (m) | Reverse (m) | Deviation of Direct (mm) | Deviation of Reverse (mm) |
|---|---|---|---|---|---|
| 27,294.62 | 2.7061 | 2.7063 | 2.7063 | 0.2 | 0.2 |
| 27,297.01 | 2.7073 | 2.7060 | 2.7050 | −1.3 | −2.3 |
| 27,299.39 | 2.7070 | 2.7045 | 2.7057 | −2.5 | −1.4 |
| 27,301.77 | 2.7071 | 2.7056 | 2.7050 | −1.5 | −2.0 |
| 27,304.16 | 2.7050 | 2.7046 | 2.7040 | −0.4 | −1.0 |
| 27,306.55 | 2.7061 | 2.7035 | 2.7043 | −2.6 | −1.7 |
| 27,308.93 | 2.7046 | 2.7052 | 2.7049 | 0.6 | 0.3 |
| 27,323.17 | 2.7051 | 2.7050 | 2.7051 | −0.1 | 0.0 |
| 27,325.55 | 2.7069 | 2.7055 | 2.7050 | −1.4 | −1.9 |
| 27,327.93 | 2.7058 | 2.7038 | 2.7045 | −2.0 | −1.3 |
| 27,330.32 | 2.7047 | 2.7059 | 2.7053 | 1.2 | 0.6 |
| 27,332.70 | 2.7058 | 2.7027 | 2.7038 | −3.1 | −2.0 |
| 27,335.08 | 2.7064 | 2.7050 | 2.7051 | −1.4 | −1.3 |
| 27,337.45 | 2.7054 | 2.7040 | 2.7040 | −1.5 | −1.4 |
| 27,339.84 | 2.7065 | 2.7037 | 2.7047 | −2.8 | −1.7 |
| 27,342.22 | 2.7065 | 2.7048 | 2.7055 | −1.7 | −1.0 |
| 27,344.60 | 2.7074 | 2.7051 | 2.7042 | −2.2 | −3.1 |
| 27,346.98 | 2.7069 | 2.7050 | 2.7059 | −1.9 | −1.0 |
| 27,349.36 | 2.7031 | 2.7053 | 2.7050 | 2.2 | 1.9 |
| Absolute mean | 1.6 | 1.4 |
| Cross-Section | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | Mean |
|---|---|---|---|---|---|---|---|---|---|---|---|
| Direct | −10.4 | −12.2 | −12.7 | −14.0 | −13.4 | −14.3 | −11.1 | −10.2 | −8.4 | −8.7 | −11.5 |
| Reverse | 5.5 | 3.4 | 3.8 | 4.6 | 5.8 | 4.5 | 3.9 | 4.1 | 5.2 | 5.3 | 4.6 |
| Deviation | 16.0 | 15.6 | 16.5 | 18.5 | 19.2 | 18.7 | 15.0 | 14.2 | 13.5 | 14.1 | 16.1 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Du, L.; Zhong, R.; Sun, H.; Zhu, Q.; Zhang, Z. Study of the Integration of the CNU-TS-1 Mobile Tunnel Monitoring System. Sensors 2018, 18, 420. https://doi.org/10.3390/s18020420
Du L, Zhong R, Sun H, Zhu Q, Zhang Z. Study of the Integration of the CNU-TS-1 Mobile Tunnel Monitoring System. Sensors. 2018; 18(2):420. https://doi.org/10.3390/s18020420
Chicago/Turabian StyleDu, Liming, Ruofei Zhong, Haili Sun, Qiang Zhu, and Zhen Zhang. 2018. "Study of the Integration of the CNU-TS-1 Mobile Tunnel Monitoring System" Sensors 18, no. 2: 420. https://doi.org/10.3390/s18020420
APA StyleDu, L., Zhong, R., Sun, H., Zhu, Q., & Zhang, Z. (2018). Study of the Integration of the CNU-TS-1 Mobile Tunnel Monitoring System. Sensors, 18(2), 420. https://doi.org/10.3390/s18020420