1. Introduction
In recent years, with the development of wireless technology, the demand for location-based services (LBS) is increasing [
1]. As we all know, tracking, localization and navigation are hot topics in academia and industry [
2]. In addition, the popularity of mobile computing devices inside buildings promotes the development of indoor localization. An accurate indoor location service gives people better convenience, especially in hospitals [
3], airports, car parks, underwater [
4], mines, and so on. Therefore, in the future generation of communications networks, accurate, reliable and real-time indoor localization and position-based protocols and services are required.
Nowadays, a variety of indoor localization technologies have been derived, including GPS, infrared, ultrasound (US), time of flight (TOF) and magnetic (MG). Although the Global Navigation Satellite Systems (GPS, GLONASS, Galileo or Beidou) support localization, they cannot operate satisfactorily in indoor scenarios due to numerous factors [
5]. Many different localization techniques and indoor localization systems (IPS) have been proposed to deal with indoor localization [
6]. A few efforts have been done in the context of infrared (IR) wireless networks. The limited range of IR networks is a handicap in developing this technology. Furthermore, the IR network is often deployed for the purpose of locating people and does not provide traditional data networking service [
7]. ToF mainly estimates the distance by measuring the signal transmission time between nodes. However, this technique has some drawbacks. The transmission of an ultra-wide band signal requires relatively large energy consumption, and the effective measurement distance is short. The distance measured by ultrasonic technology can reach the precision of centimeters. Ultrasonic technology can make the structure of the system relatively simple, and the light does not interfere with the ultrasonic. The disadvantage is that the ultrasonic signal attenuates in the air, and the small ultrasonic probe can only reach the meter level. If the reflection range is adopted, it will also be affected by the multi-path effect, and the ultrasonic wave is the method of line-of-sight propagation, so it is not suitable for large-scale occasions. In addition, the transmitting nodes with ultrasonic sensors usually need to continuously broadcast the acoustic signal, which is a significant expense for the whole network, which increases the cost of the hardware facilities. The tracking and locating of equipment based on the principle of MG [
8] is characterized by its portability, simple operation and low cost. However, the system also has many shortcomings as follows: The MG transmitting device needs to continuously emit MG signals with high power consumption and high requirements on the power supply system. In the tracking and positioning, the technology is seriously disrupted by the external MG interference; the operation is cumbersome; the error is large; and the requirements of the monitoring personnel are high. Technologies based on existing infrastructure include WiFi [
9], ZigBee, Bluetooth, UWB and RFID [
10]. To estimate the position, we need to measure some signal characteristics. Common signal features include arrival time (TOA), arrival time difference (TDOA), receiving signal strength indication (RSSI), etc. [
11].
Among many RSSI-based indoor positioning technologies, the more popular positioning technology is based on WiFi wireless signals since the IEEE802.11 APs were deployed as wireless local area networks (WLANs). Prior to the widespread adoption of WiFi technology, radio frequency (RF)-based [
7] RADAR systems have been proposed that determine a user’s location by recording and processing signal strength information from multiple base stations. In the meantime, some researchers have proposed hybrid indoor positioning methods such as using 2D markers to supplement WiFi intensity or using different wireless technologies such as cellular GSM, DVB, FM and WLAN to locate users. However, network access points with higher radio coverage, such as GSM and FM base stations, contribute less to indoor positioning. Some researchers have tried to build indoor positioning systems such as RFID and ZigBee in combination with other low-power technologies. However, these technologies require a large number of low-power devices to support the positioning process. Some researchers are also working on multi-source data combination positioning technology, which can improve the positioning accuracy, but the system cost will be greatly increased. WiFi is very popular and is one of the most commonly-used wireless technologies in the room. It is often used for wireless Internet connections in many buildings, such as shopping malls, factories and other public places. One great advantage of this technology is that it is widely used in a variety of devices, such as mobile phones, laptops and tablets, which users usually use [
12].
WiFi based on indoor location systems typically uses WiFi access points (APs) to calculate the user’s possible locations [
13]. In the indoor environment, the extensive application of WiFi makes WiFi-based IPS possible in many places. The localization method based on RSSI [
14] has become the mainstream method of indoor localization, with the advantages of low cost, wide coverage and no need for any other hardware [
15]. The method is generally divided into two categories. The trilateration algorithm is based on the principle of distance crossover; the fingerprint location method is based on the database and the specific geometric or probabilistic algorithm to calculate the location of unknown points [
16]. The extraction of RSSI is crucial for trilateration algorithms and fingerprinting methods [
17]. The refinement of RSSI directly affects the accuracy of positioning; Bisio; et al. [
18] consider that different handsets can have an impact on RSSI, and they propose a localization method over different smartphones. It eliminates the impact of different handsets on RSSI.
WiFi fingerprinting [
19] is based on the RSSI associated with each wireless access point (APs) and is compared to a fingerprint database [
20]. This fingerprint database contains a set of previously-recorded fingerprints at known reference points. The location of the target is usually determined by calculating the distance or fingerprints collected by the device and the fingerprints contained in the reference database [
21]. However, there is an important disadvantage that the WiFi signals are affected by a number of factors, including changes in personnel activities and environmental facilities. Moreover, the hardware properties of APs also have a serious impact on RSSI and affect the performance of an indoor localization system. At present, some researchers have begun to discuss how to select an appropriate AP for positioning. Chen; et al. [
22] discusses a method of selecting APs for indoor localization. An important goal of indoor location estimation systems is to increase the estimation accuracy while reducing the power consumption. Choosing a suitable AP can reduce the power consumption of the AP and, at the same time, achieve a better positioning effect.
For example, in underground mines, the environment is complicated and changeable, and when it changes, it will lead to the mutation of RSSI [
23]. Moreover, considering the construction conditions of underground mines or unforeseen emergencies, there are potential safety hazards in the physical equipment in the location environment. When an AP is impaired, the RSSI of the AP loses the original transmission characteristics. Larger localization errors caused by these disturbances are more serious, especially for emergency rescue and target tracking in the current situation, which will lead to the target not being able to be accurately located.
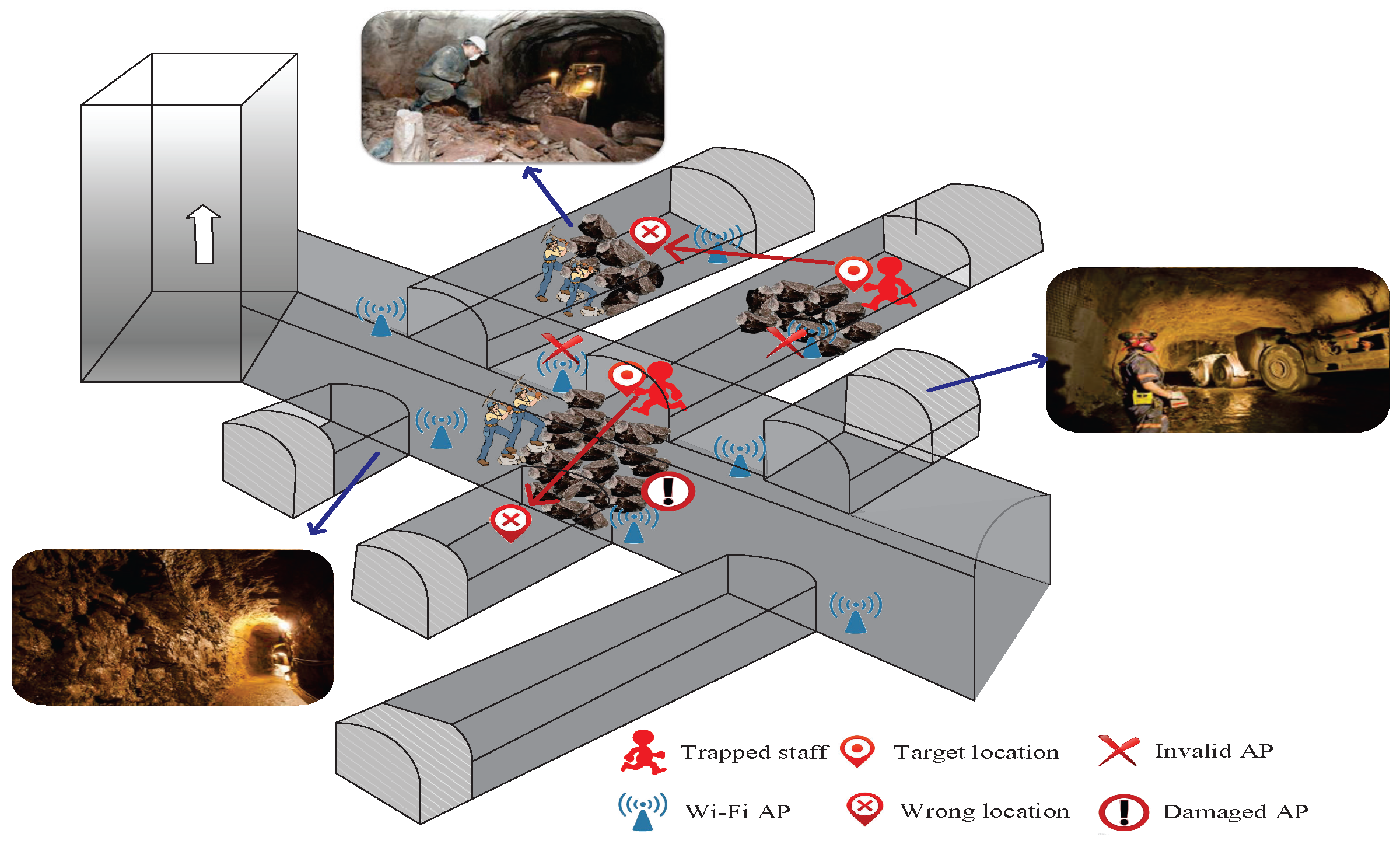
Figure 1 depicts the scenario of using impaired APs to locate when environmental changes occur. The impaired APs may be caused by plenty of factors, including earthquakes, explosions or just regular maintenance. In this paper, we describe the localization problem when there are impaired APs by using a mine collapse scenario. As shown in
Figure 1, when the environment changes, APs are impaired and do not work properly, and if you cannot identify impaired APs in time, it will continue to use the RSSI of the impaired APs to locate. The RSSI of the impaired APs will be mutated, making it poorly matched with the fingerprint database and resulting in incorrect location information. In the case of emergency rescue, giving the wrong target location will mislead the rescue work and miss the best time to rescue.
In view of the above problems, this paper analyzes the known WiFi fingerprinting methods for indoor localization. We examined various aspects of WiFi fingerprinting, including impaired APs and changes of the localization environment. We analyzed the RSSI characteristics of impaired APs. A method of identifying impaired APs is found by analyzing and comparing the RSSI, which is affected by the environment and the impaired APs. In the position estimation algorithm, the impaired APs are filtered, to ensure the fingerprints are safe and reliable in the position estimation.
The rest of this article is organized as follows.
Section 2 reviews the related work on reducing localization errors.
Section 3 analyzes the characteristics of RSSI and the problems caused by different influences.
Section 4 introduces the research content proposed in this paper.
Section 5 shows the experimental analysis and the experimental results of the proposed work.
Section 6 gives the conclusions drawn from this work.
2. Related Work
Understanding RSSI data analysis is crucial to indoor localization algorithms. Gaussian or log-normal distributions are currently used to simulate the RSSI randomness. Large-scale measurements [
24] show that the RSSI histogram fits the Gaussian distribution. In addition, smartphones are smaller and have less computing power than laptops, so smartphones are more sensitive to environmental changes when collecting RSSI for indoor location applications. This stimulated our analysis and research on RSSI and improved the indoor localization accuracy of smartphones.
A basic requirement of fingerprint recognition is that the fingerprint must be accurate and updated in time. Hao Jing et al. [
25] proposed a new fingerprinting training method, which can set the fingerprint database when the user enters an environment without a prior database. Previous databases can also be updated by collecting information from surrounding users. Both historical data and new data have been applied to update the database, and reduce training costs. The authors in [
26,
27] studied autonomous crowdsourcing methods to train and update WiFi databases. For crowdsourcing databases, the accuracy of the fingerprint database is crucial to estimating locations. In [
28], the authors improved fingerprinting performance by allowing users to interact with the system. However, these methods require active collaboration with users who may not be willing or likely to make mistakes.
Many scholars have done much research on the factors that affect the position of fingerprints. Wallbaum [
29] used several analytical models and empirical multi-wall radio propagation models to study the impact of the following key parameters on indoor location: RSSI bias, number of access points and granularity of the grid. Krishnakumar and Krishnan [
30] made some important observations about the estimation uncertainty and the dependence of various factors. The observed factors include the signal variance, the number of APs and the distance between APs and signal propagation constants. Dempster et al. [
31] introduced RSSI analysis of variance, indicating that different users’ orientations at the reference point affect the RSSI captured by the device. The result is that the relationship between the true distance of two fingerprints and the RSSI distance is poor. One of the reasons for the localization error is comparing fingerprints with imperfectly suitable reference fingerprints.
In order to localize in the underground environment, Liu [
32] and others proposed a target method of underground localization based on distance constraints. RSSI technology is used to measure distance, but the radial error is large because the algorithm contains approximation. In [
33], in order to improve the localization accuracy of wireless sensor networks in underground tunnels, an anchor node selection mechanism was proposed. The mechanism is based on the tunnel’s three-dimensional spatial characteristics and the choice of wireless communication frequency: firstly, sorting from high to low based on RSSI values; secondly, selecting four anchor nodes with higher RSSI by Gaussian elimination. The algorithm selects the anchor nodes according to the RSSI level, but when there are fewer anchor nodes, the unstable anchor nodes may still be selected.
Haeberlen et al. [
34] studied the time-varying phenomenon of RSSI. The authors point out that environmental impacts, such as interference and movement of people or mobile nodes, cause time-dependent fluctuations in RSSI and severely reduce the performance of the localization system. A discussion of sample correlations was proposed in [
35], and the authors used these highly correlated RSSI samples in their localization system. However, in the RSSI time series, there are no detailed reports to study the stationarity or correlation of time-varying phenomena. In addition, over time, signals from APs may disappear due to the intermittent degradation of the radio channel. This can result in null values of the RSSI in position determination and can lead to negative effects on performance, computational complexity and indoor localization system scalability [
36].
This paper presents a secure indoor location algorithm based on the trusted location fingerprint. The proposed algorithm can be applied to many scenarios, including earthquakes, explosions and floods. The algorithm can identify the impaired AP after an accident and select the safe and trusted AP to locate. For example, in the case of a magnitude 5.0 earthquake, it may lead to the collapse of a few tunnels and the breakdown of some pipes. In this case, the algorithm can exclude the impaired APs and select safe APs to locate the target and carry out rescue work. In the event of a major accident, the algorithm identifies that all the APs have been impaired, and then, the positioning system may fail. If the positioning system can operate, the reference value of the positioning result will be determined according to the number of impaired APs. The main contributions of this paper are as follows:
A fingerprint database update model based on error analysis is introduced. According to the characteristics’ analysis of RSSI and error verification, the fingerprint database is updated partially. It can reduce the update overhead and avoid the introduction of unreliable fingerprints when updating the fingerprint database.
We propose a trust factor extraction mechanism based on the voting algorithm. APs are voted through the test of RSSI based on reference points. According to the vote, results extract APs’ trust factor, reducing the impact of untrusted APs on localization.
We designed a fingerprint matching algorithm based on weight distribution. By comparing the RSSI value received on the online phase with the offline phase, we can filter out the broken APs and the new APs. The trust factor of APs is used in the calculation of fingerprint weight, to reduce the impact of untrusted fingerprints on the location algorithm.
3. Localization Model
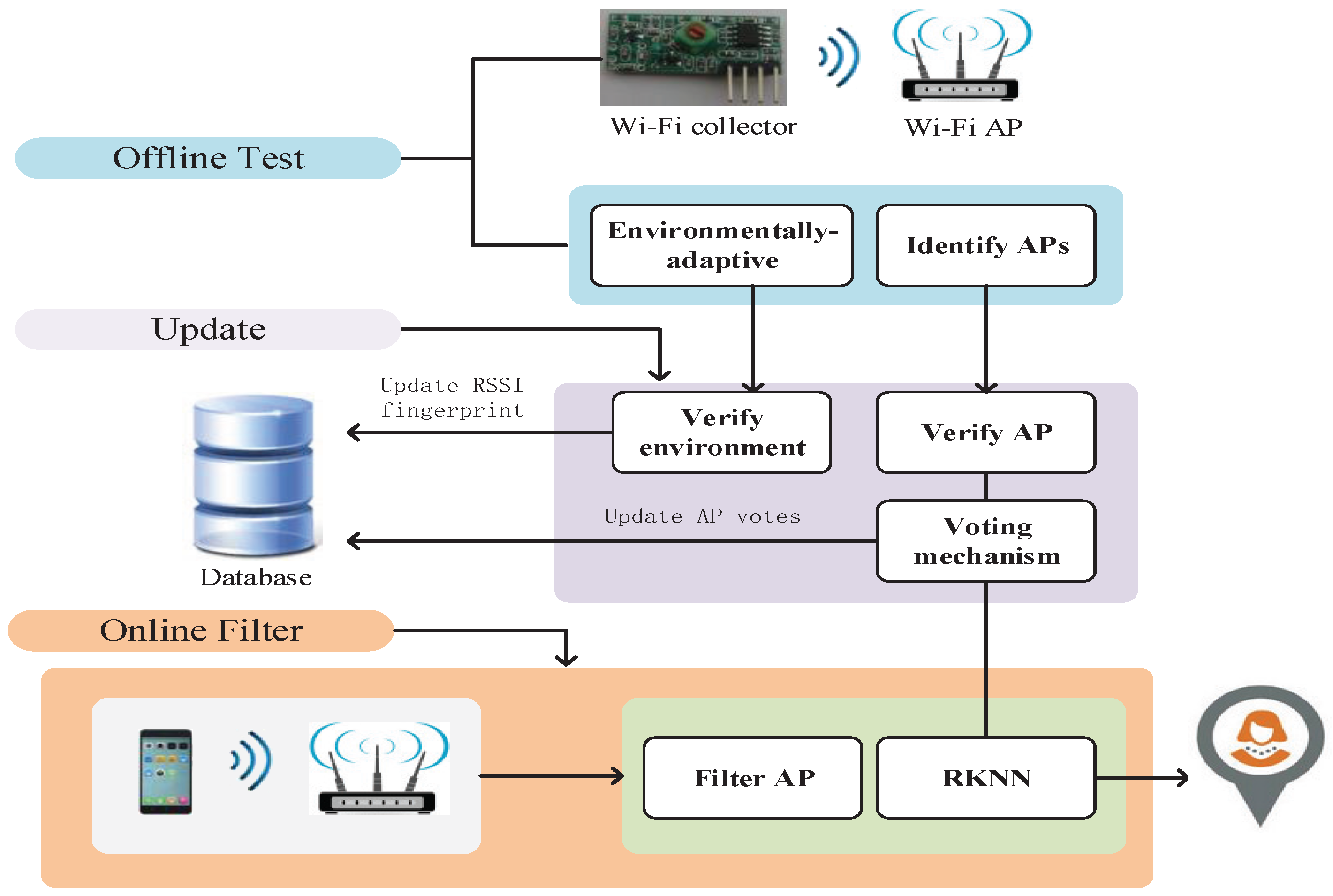
WiFi fingerprinting is a well-known indoor localization solution, which relies on a fundamental assumption: the WiFi signals measured in the environment have a unique signature that comprises the WiFi fingerprint at a given position. In this section, we only analyze the changing characteristics of RSSI under different interferences. According to the experiment and scene analysis, this paper presents a fingerprint extraction mechanism. The system framework is shown in
Figure 2. The symbols used in this paper are shown in
Table 1.
The algorithm proposed in this article is to detect the secure status of the positioning device. In positioning, if the localization device is damaged or fails, the proposed algorithm filters the device by detecting the secure status of the localization device and selects the data of the localization device that is safe and trustworthy to locate the target. Therefore, when emergencies such as earthquakes, floods and explosions occur in the positioning environment, the proposed algorithm can identify the secure physical devices and locate the targets with safe and reliable data. This paper improves the robustness of the positioning system by using the security identification algorithm.
3.1. Fingerprinting Localization
The fingerprint-based localization process is usually divided into two stages: the offline sampling phase and online localization phase. The offline phase creates a fingerprint database. The specific content collects the RSSI at all reference points in the locating area. The RSSI of APs at a reference point are taken as the fingerprint. All the fingerprints of the reference points form a fingerprint database. Each piece of fingerprint information corresponds to the position information. The indoor localization environment is variable, so in order to reduce the interference of environmental factors, we continuously sample at each sampling point and calculate the average. According to the RSSI of the location to be positioned, the fingerprint matching algorithm is used to calculate the similarity degree and obtain fingerprints that have high similarity. Then, the reference position coordinates corresponding to the fingerprint are taken as the actual position of the user. The original fingerprint localization algorithm keeps the offline fingerprint database static, but for the variable environment, if the fingerprints in the database remain unchanged, the final localization results will have greater deviation.
Fingerprint-based localization technology not only should consider the differences of the fingerprint between the online phase and offline phase, but also needs to consider the AP’s physical security issues. If the AP is impaired due to external conditions and at the same time the AP is still used for localization, the localization accuracy will be affected by the AP. In addition, if there are new APs in the environment and the fingerprint of the APs is not updated in the fingerprint database, the localization error may also be increased if the APs are used for localization.
3.2. Error Sources of RSSI
Nowadays, most researchers usually consider the loss problem of RSSI propagation, and they take corresponding measures to deal with the problem. However, when performing localization in harsh indoor environments such as in underground coal mine localization, the safety of staff needs to have attention paid to it; at the same time, the safety of physical equipment should also be of concern to ensure that the system that uses the equipment can work normally. When the APs are impaired, the RSSI will be changed. In the fingerprint-based localization system, if there are wrong RSSI, this will cause a large localization error. In order to make the localization result more accurate, we need to identify the environmental factors and other external conditions and select more stable and trusted fingerprints for localization.
This section analyzes the impact of APs themselves on localization accuracy. In the underground coal mine localization environment, due to the variability of the environment and the complexity of the tools used, the physical equipment may be impaired to varying degrees. The impaired extent of the equipment can be roughly divided into: slightly impaired and completely destroyed. Slightly impaired represents that the device can transmit signals, but due to the equipment being impaired, the signal transmitted by the equipment is weak or unstable. Completely destroyed means that the equipment is unable to work, so it cannot transmit signals. In order to avoid the impact of impaired equipment on the localization accuracy, we need to identify different degrees of impairedness and then apply different solutions for different situations. For slightly impaired APs, we reduce the trust value of the APs in localization so that the fingerprint in the fingerprint database can be more compatible with the fingerprints in the online phase. The deployment and the number of APs also affect the localization result. In order to reduce equipment overhead, when deploying APs, we should achieve the best effect with minimum APs. Therefore, if there are destroyed APs in the localization environment, we should identify and handle the APs in time so as to avoid the impact of the APs on the localization system.
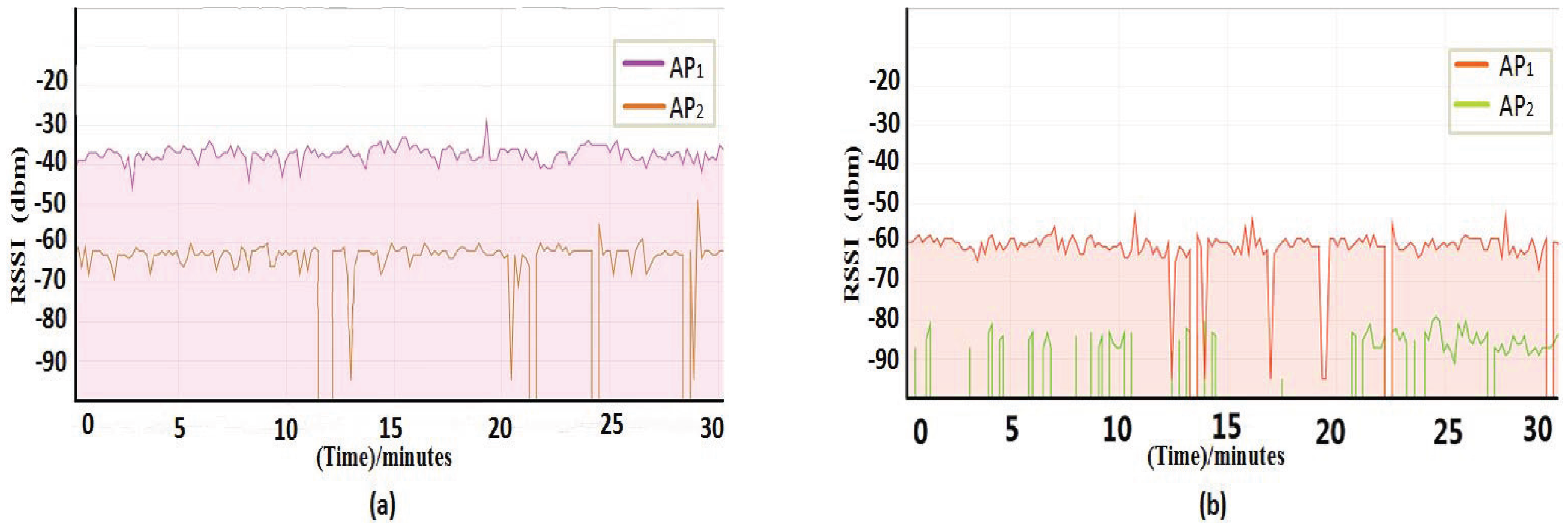
We carry out an experimental analysis of the RSSI when there is an impaired AP. First, we fixed the distance between the measuring location and the AP, then we collected the RSSI for impaired AP and normal AP, respectively. In order to verify whether the distance between the measuring location and the AP may have an effect on the distinction between normal AP and impaired AP, we increase the distance between the AP and the measuring location, then collect the RSSI values when the AP is impaired and the AP is normal. The RSSI was recorded every five seconds, and the total duration was 20 min. The experimental results are shown in
Figure 3.
It can be seen from
Figure 3 that the RSSI of the impaired AP is obviously lower than the RSSI of the normal AP, no matter the distance between the measuring location and the AP. Furthermore, the RSSI of an impaired AP is extremely unstable compared with the RSSI under normal conditions. If the AP is completely destroyed, it is impossible to receive the AP’s RSSI no matter how close we are to the AP.
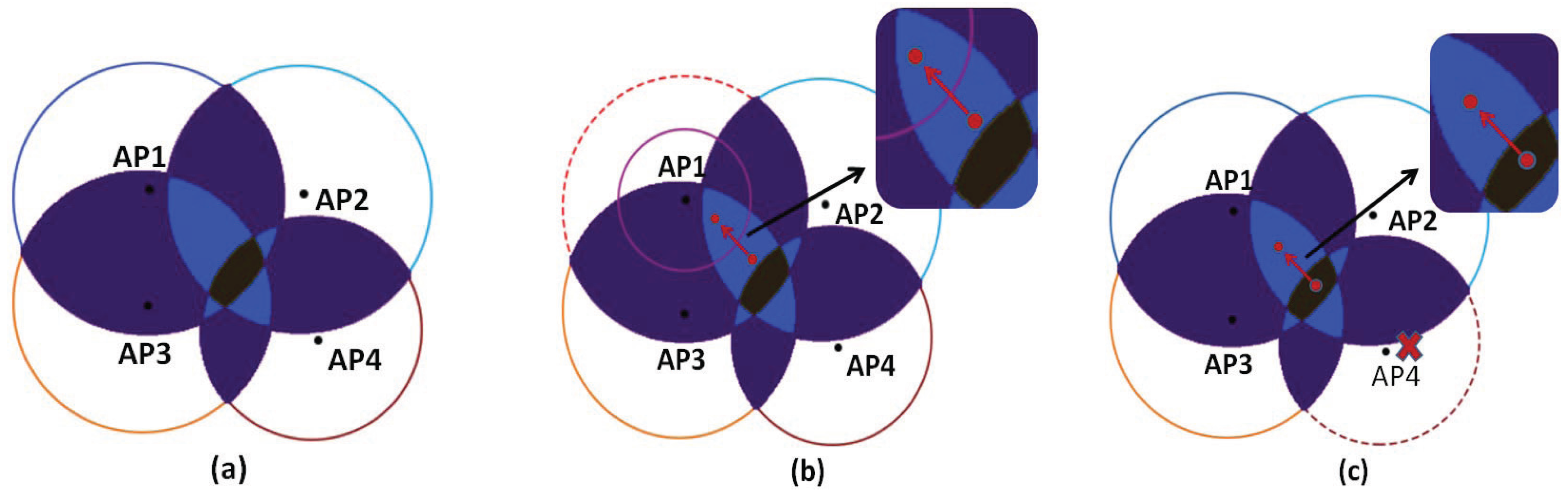
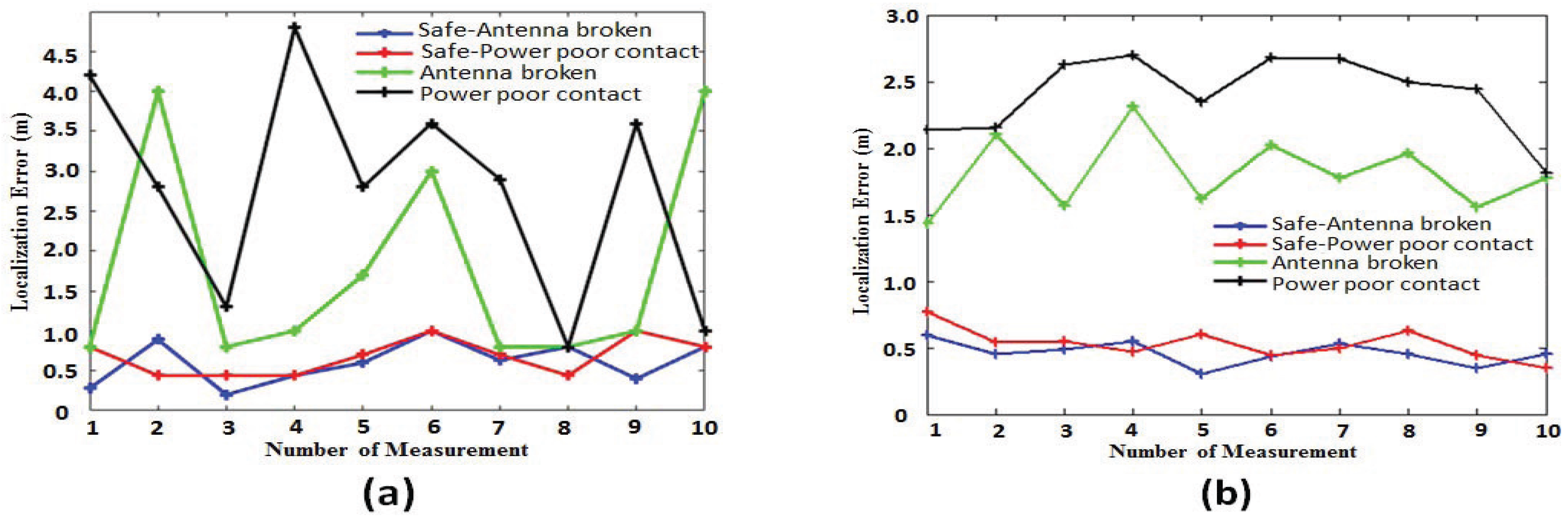
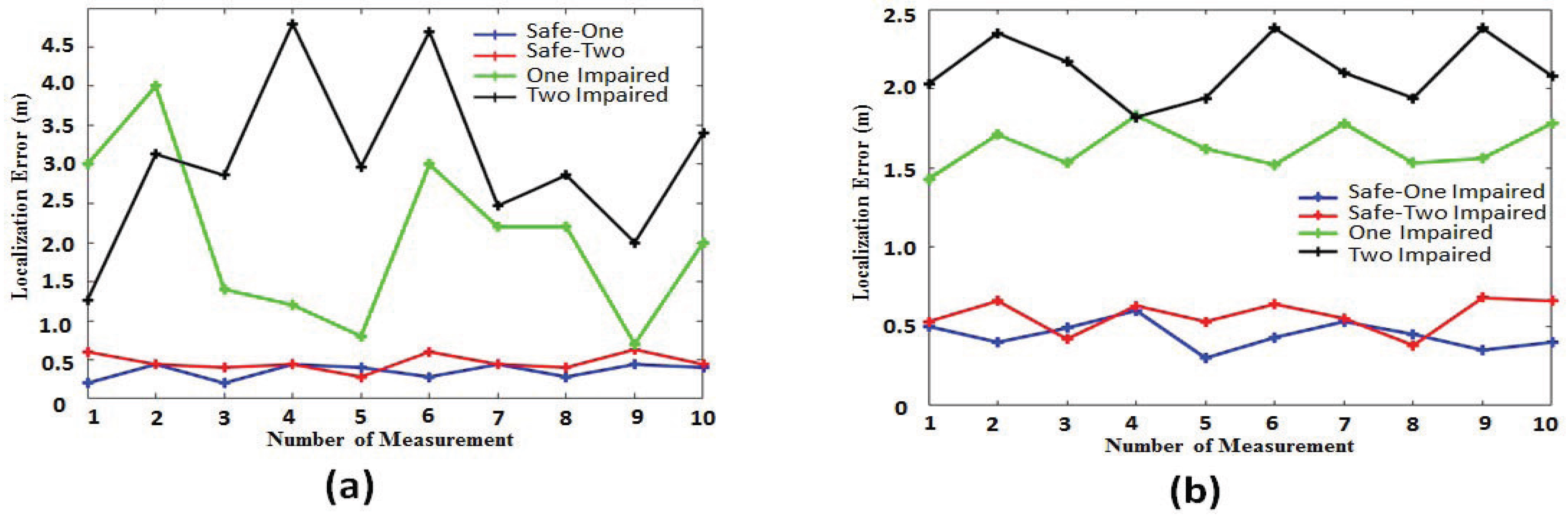
Figure 4 shows the problems with the localization system when an AP is impaired.
Figure 4a shows the target location area that the localization system obtains based on the RSSI under normal conditions. When an AP is slightly impaired, the RSSI will decrease. If we do not know that the AP is impaired and use it for localization, the localization result will be affected by the AP, resulting in a large error in the localization result.
Figure 4b shows that when an AP is impaired, the localization system obtains the change of the target location area compared with the normal situation. When an AP is impaired, the RSSI will decrease, so the coverage area of the AP will be smaller, and its RSSI is not stable. If the AP is used for localization, its localization interval will be affected by the AP so that the localization area moves toward the wrong area, resulting in a larger localization error.
Figure 4c shows the change of the localization area when an AP is destroyed. If it is still used for localization when the AP is destroyed, the obtained localization interval will be offset and become larger, and the localization accuracy will be reduced. Therefore, we need to identify the impaired AP to ensure that the location fingerprints in the localization system are safe and trusted.
Based on the above analysis, the impaired AP has a serious impact on localization accuracy. Therefore, the localization system needs to be clear about the security status of APs, then perform the appropriate treatment. According to the analysis of the change of RSSI in
Figure 3, we can see that the three states of normal, impaired and destroyed APs can be distinguished according to the change of RSSI and the fluctuation degree.
3.3. Effective Screening Model
In the underground coal mine localization environment, the length and width of the coal mine, the number of mines and the position of obstacles are dynamically changing. The size of the RSSI will change in real time due to the environmental factors. The traditional static fingerprint database localization technology is not suitable for the scene whose environment changes frequently. In order to adapt to the variable environment of coal mines, we deploy some reference anchor nodes of known positions in the localization environment and update the fingerprint database according to the localization results of the anchor nodes. While updating the fingerprint database, this paper analyzes and compares the changes of RSSI received by reference anchor nodes to identify impaired APs.
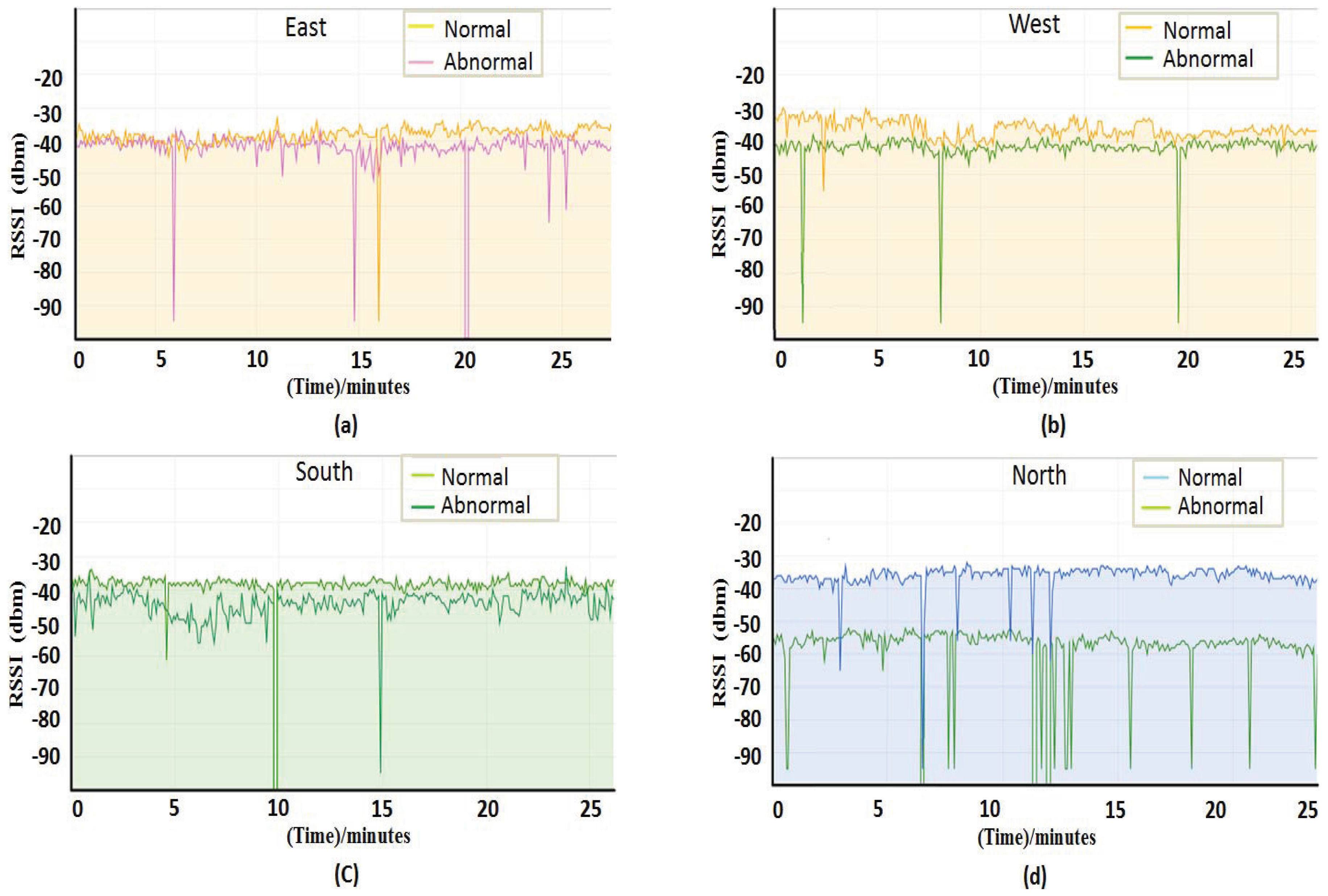
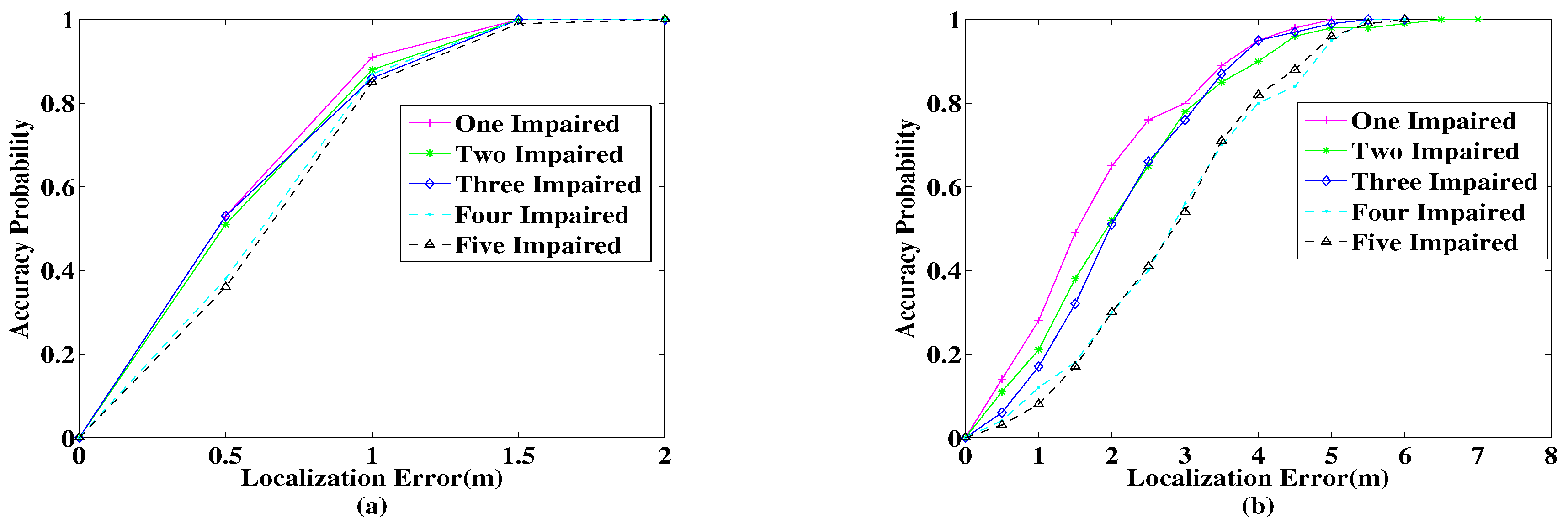
In the underground coal mine localization environment, the physical equipment and the personnel concentration areas are variable, so there are some difficulties in distinguishing the impaired AP from the environment-affected APs. In order to choose a better filter mechanism, we analyzed the characteristics of RSSI, which is affected by the environment. We collected RSSI of environment-affected APs and normal APs in four different directions as shown in
Figure 5. The four images in
Figure 5 represent RSSI obtained in four different directions, each of which represents normal RSSI and disturbed RSSI. It can be seen from
Figure 5 that the impact of environmental factors is regional, which is that only the areas affected by the environment have a change of RSSI, while RSSI in other regions are not affected. From
Figure 5, we can draw the conclusion that the obvious change of RSSI can only occur in the direction of environmental impact, whose change do not affect all the reference anchor points.
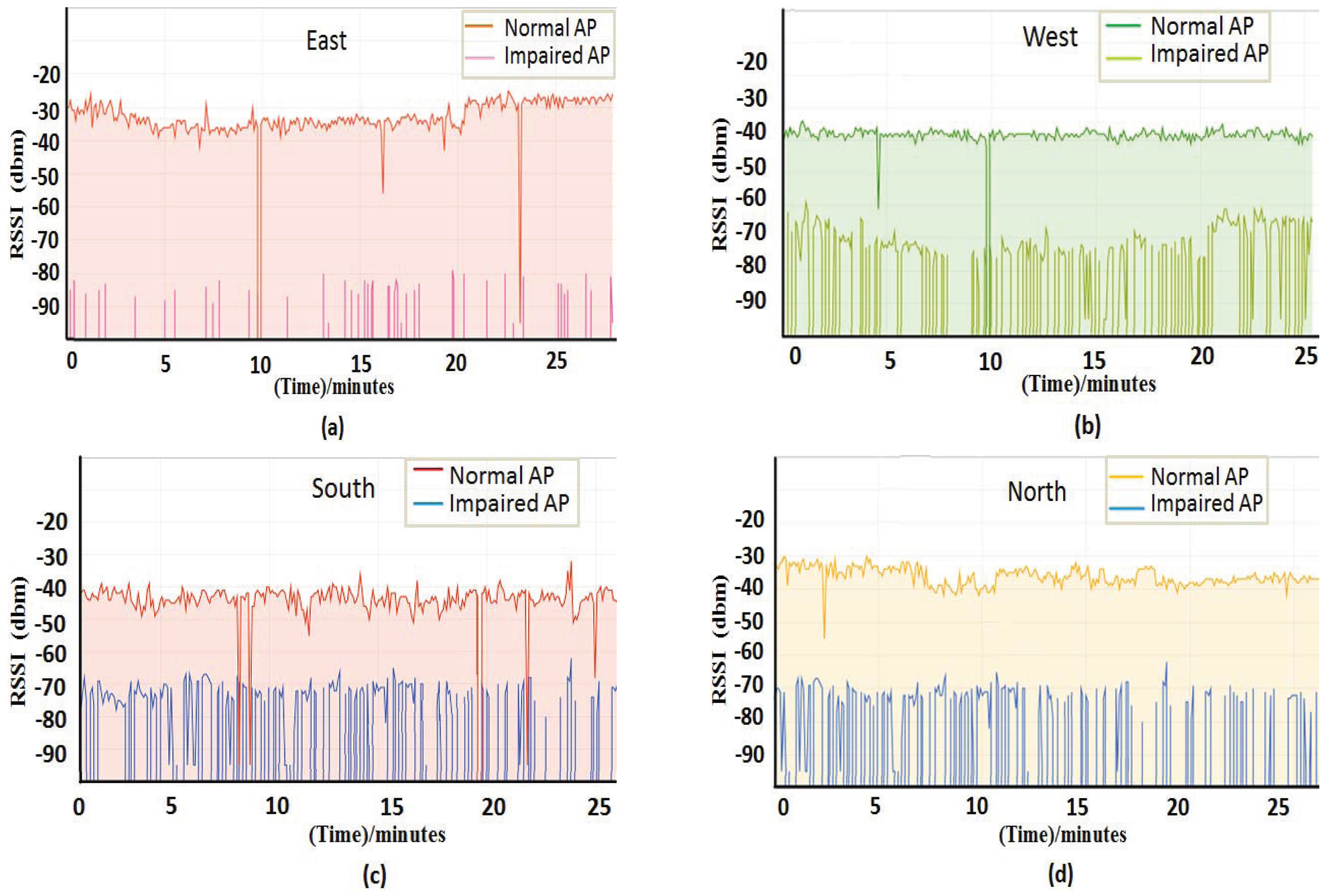
In order to find the difference between the impaired AP and the environment-affected AP, we measured the RSSI of the AP in four different directions when the AP was impaired as shown in
Figure 6.
Figure 6 shows the comparison of RSSI regarding impaired AP and normal AP in four different directions. As you can see from
Figure 6, the RSSI around the AP change when the AP is impaired; the surrounding reference anchor nodes can detect the change of the RSSI and can obtain the fluctuation degree according to the RSSI collected over a period of time. However, when the environment changes, only the reference anchor nodes in a certain direction may detect the change of the fluctuation degree and the size of RSSI. Therefore, the method of voting by reference anchor nodes can be used to identify the impaired AP.
Moreover, as can be seen from
Figure 6, the RSSI fluctuation value of the normal AP is small, and the fluctuating RSSI value of the impaired AP is large. Furthermore, the normal AP’s RSS value is greater than the value of the impaired AP. Due to the existence of RSS heterogeneity, such as RSS offset, there may be some error if comparing the average value of RSS before and after updating the database to determine whether the AP is normal. In addition, using the change of standard deviation before and after the update database as a voting standard, we can screen out APs with relatively stable RSSI values. Using these APs for positioning can make the positioning result more accurate. Therefore, this paper compares the standard deviation of RSSI before and after updating the database to vote on the impaired AP.
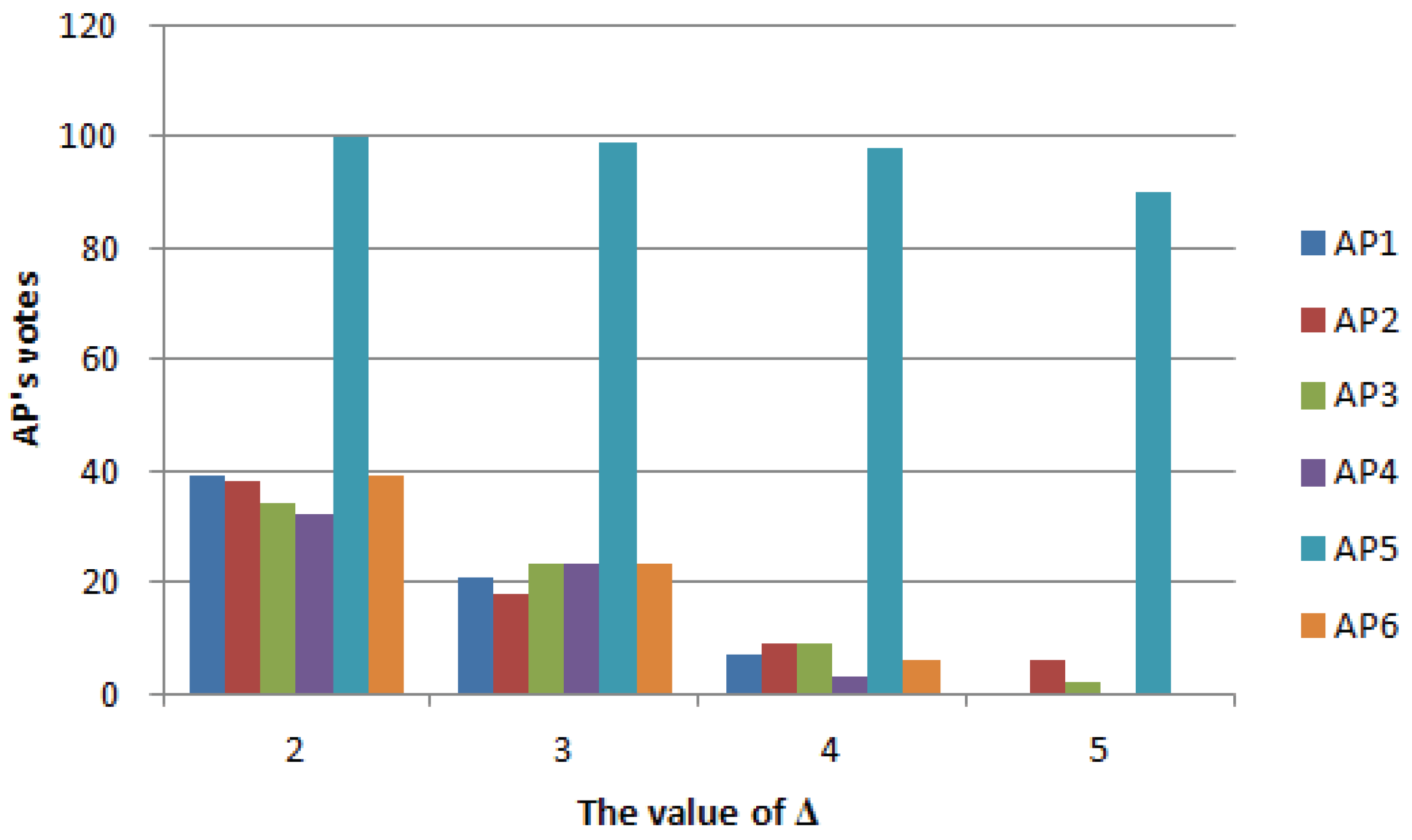
When an AP is impaired, if the reference anchor node around it votes on the AP using the voting mechanism, the number of votes of the impaired AP will increase. If the weight of AP is given according to the number of votes, the trust value of the AP fingerprint will be obtained when localization has occurred, and the impact of impaired AP on the localization result will be reduced. If the AP is affected by environmental factors, only the reference anchor node in a certain direction will vote on the AP and will not cause the AP to have a higher number of votes. Therefore, the AP still has a higher trust value. If the surrounding environment of an AP is changed greatly and the fingerprint fluctuation is large, the votes of the AP will be very high. Therefore, using this method one can also filter APs that are greatly affected by the unstable environment. In this way, the impaired APs can be well identified, filtering the untrusted fingerprint of impaired APs. If none of the reference anchor nodes around an AP can receive the RSSI, it can be concluded that the AP is broken; the fingerprint of the AP in the fingerprint database is updated; and the AP is filtered during localization.
6. Conclusion
We researched the instability of the RSSI and analyzed the factors that caused the RSSI instability. Over time, physical device performance may deteriorate, equipment may be impaired and the localization environment may change; these factors can cause large changes in the RSSI. In this article, we mainly analyzed the influence of the changing environment, impaired APs, broken APs and newly-introduced APs on the localization system. We found that the instability of the RSSI is mainly the problem of fingerprint matching in the online phase and the offline phase. When the RSSI is unstable or new APs are added and the fingerprint database is unchanged, the difference in RSSI between the online phase and the offline phase is larger, resulting in an increase in localization error. Therefore, the choice of stable and credible fingerprints can effectively improve the localization accuracy.
We analyzed the changing characteristics of RSSI when the environment was disturbed and the physical equipment was impaired. We found a significant difference between the standard deviation of RSSI, the size of RSSI change and the affected range of RSSI. In addition, when collecting RSSI, the location and direction of the collection point will affect the size of RSSI. We proposed a new fingerprint database update method. The method uses the fixed reference anchor node for fingerprint database updating, which can reduce the interference factor when collecting training data. We proposed the voting mechanism, which can well identify the impact of different factors on RSSI and then extract the trust factor of the fingerprint and locate it by using safe and trusted location fingerprints.
According to the experimental verification, the proposed algorithm can identify the impaired APs well. In further work, a variety of studies will be possible by detecting impaired APs; for example, calculating the safety index of the area by detecting the impaired frequency of APs and making the hazard warning through the impaired area of APs to avoid unnecessary disasters. In addition, APs deployed in this article adopt an irregularly-shaped deployment. In future work, we can discuss how to deploy APs reasonably so that we receive the most APs in the location area.
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}