3.2. Simulations and Analysis
Monte Carlo simulations were conducted to comprehensively evaluate the performance of the proposed AFUKF-MODF for the dynamic flight of an unmanned aerial vehicle (UAV) using the INS/GNSS/CNS integration for navigation and positioning. The flight trajectory, which involves various maneuvers such as climbing, pitching, rolling and turning, is shown in
Figure 2. The simulation parameters are listed in
Table 1. Both filtering period and fusion period were 1 s. The Monte Carlo simulations were carried out 100 times.
The initial state error covariances and process noise covariance for the local filters are set as
However, () and were enlarged to the twice of their initial values for both FKF and UKF-FKF to eliminate the correlation between the two local state estimations by the use of covariance upper bound. Moreover, the process model of the INS/GNSS/CNS integration should be linearized in local fitering processes for the FKF.
The measurement noise covariances are set as
In order to evaluate the performance of the proposed AFUKF-MODF in terms of process-modeling error, the following process-modeling error is introduced to the process model of the INS/GNSS/CNS integration during the time interval from 400 s to 600 s
Accordingly, the process model used in the local filters is
To identify the above process-modeling error, and used in the proposed AFUKF-MODF for the INS/GNSS subsystem and INS/CNS subsystem were chosen as 12.592 and 7.815, respectively. These values are resulted from the distribution when the reliability level is 95% () and the degrees of freedom are 6 and 3, respectively.
For comparison analysis, simulation trials were conducted at the same conditions by using FKF, UKF-FKF, UKF-MODF and AFUKF-MODF, respectively. Moreover, the overall estimation error is adopted to evaluate the navigation accuracy in the simulation analysis for the four fusion methods. It is defined as the norm of the navigation parameters estimation error [
38]
where
,
and
are the components of
in East, North and Up, respectively.
Figure 3,
Figure 4 and
Figure 5 depict the root mean squared errors (RMSEs) of overall attitude errors, velocity errors and position errors by the above four fusion methods, respectively. During the time intervals (0 s, 400 s) and (600 s, 1000 s) without process-modeling error involved, FKF has poor navigation accuracy compared to UKF-FKF, UKF-MODF and AFUKF-MODF. Its estimation RMSEs in attitude, velocity and position are around
, 0.2084 m/s and 15.1129 m. This is because the use of covariance upper bound and the linearization of the system model cause suboptimal fusion performance. UKF-FKF adopts UKF to calculate the local state estimations, thus effectively refraining from the error caused by the linearization of system model and leading to the improved fusion accuracy. Its estimation RMSEs in attitude, velocity and position are around
, 0.1647 m/s and 13.1980 m. However, due to the use of covariance upper bound, the fusion results of UKF-FKF are still suboptimal. Different to FKF and UKF-FKF, both UKF-MODF and AFUKF-MODF are directly derived based on the principle of linear minimum variance, avoiding the use of covariance upper bound in the local filters. Thus, the fusion results obtained by both UKF-MODF and AFUKF-MODF are globally optimal, which are much more accurate than those by FKF and UKF-FKF. The estimation RMSEs in attitude, velocity and position are around
, 0.1155 m/s and 10.6099 m for UKF-MODF, and
, 0.1176 m/s and 10.7212 m for AFUKF-MODF. Moreover, since there is no process-modeling error identified, the proposed AFUKF-MODF does not incorporate the adaptive fading factor into the local estimation processes. Accordingly, its navigation accuracy is close to that of UKF-MODF during these time intervals.
During the time interval (400 s, 600 s), due to the influence of the introduced process-modeling error, the navigation accuracy of FKF, UKF-FKF and UKF-MODF degrades seriously. This is because these three methods do not have the ability to resist the influence of process-modeling error on the fusion solution. The estimation RMSEs in attitude, velocity and position are around , 0.2471 m/s and 17.8467 m for FKF; , 0.1917 m/s and 15.2703 m for UKF-FKF; and , 0.1472 m/s and 13.1225 m for UKF-MODF. In contrast, the proposed AFUKF-MODF has higher navigation accuracy than FKF, UKF-FKF and UKF-MODF during this time interval. Its estimation RMSEs in attitude, velocity and position are around , 0.1280 m/s and 11.5798 m. This is because the proposed AFUKF-MODF can identify the process-modeling error according to the hypothesis testing theory and effectively refrain from the influence of process-modeling error on the fusion solution by adjusting the time-varying adaptive fading factor incorporated in the predicted state covariance matrix, leading to a strong adaptability and robustness.
The mean RMSEs of the over attitude errors, velocity errors and position errors obtained by FKF, UKF-FKF, UKF-MODF and AFUKF-MODF for the time interval (400 s, 600 s) and the other time intervals are listed in
Table 2. The results in
Table 2 also verify that the proposed AFUKF-MODF has a better adaptability and robustness than the other methods, thus leading to improved navigation accuracy for the INS/GNSS/CNS integration.
The above simulations and analysis demonstrate that the proposed AFUKF-MODF can overcome the limitation of using covariance upper bound and provide globally optimal fusion results. It can also enhance the adaptability and robustness against process-modeling error to overcome the limitation of UKF-MODF, thus leading to higher navigation accuracy than FKF, UKF-FKF and UKF-MODF in the presence of process-modeling error.
3.3. Experiments and Analysis
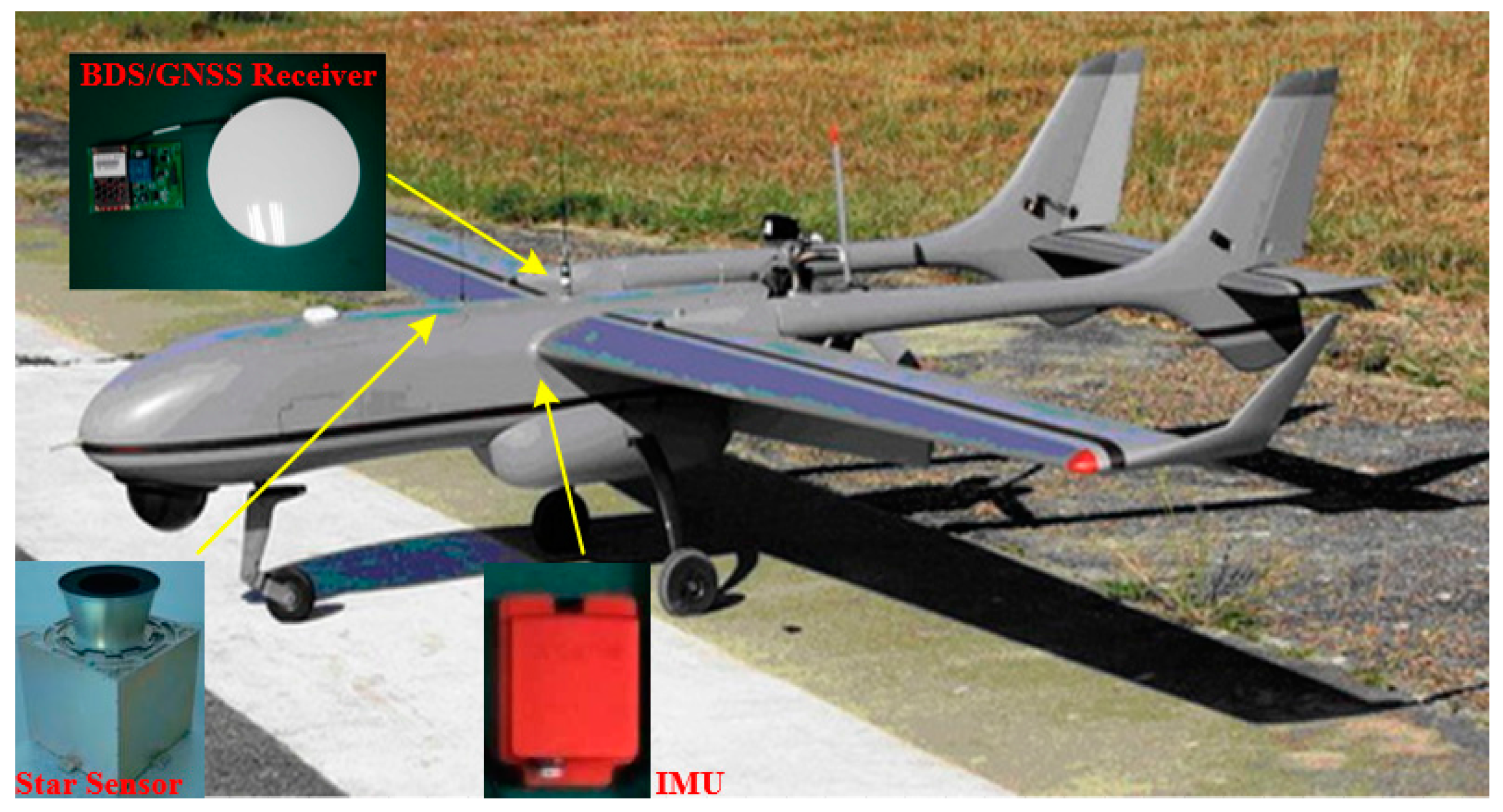
Practical experiments were also conducted to evaluate the performance of the proposed AFUKF-MODF by observing the flight of an UAV. As shown in
Figure 6, the UAV uses an INS/GNSS/CNS integration system for navigation. This navigation system includes a MTi-100 IMU, a Hemisphere P307 BDS/GNSS receiver and a SODERN SED26 star sensor. The main parameters of the above three devices are listed in
Table 3,
Table 4 and
Table 5. Moreover, another Hemisphere P370 BDS/GNSS receiver, which was placed at a local reference station (around 1km from the initial UAV position), was used along with the one mounted on the UAV to provide the differential GPS (DGPS) data. The maximal distance between the UAV and local reference station was less than 60 km to achieve the position accuracy of less than 0.1 m from the DGPS via post difference processing. The DGPS data were used as the reference values to evaluate the positioning error of the INS/GNSS/CNS integrated system.
The UAV flight test was conducted at the City of Yanliang in Shaanxi, China. The experimental navigation data were selected from the UAV flight test within a continuous time period of 1000 s, where different maneuvers were involved. Within the selected UAV flight test, the UAV initial position was at East longitude , North latitude and altitude 3525 m. The UAV initial velocity was 180 m/s, 150 m/s and 50 m/s in East, North and Up, respectively. The other initial parameters were set identically to those in the simulation case. The filtering periods of the local filters, i.e., the INS/GNSS and INS/CNS subsystems, were 1 s. The period for fusion of local state estimations was also 1 s.
Due to the complexity of the dynamic flight environment, the process model of the INS/GNSS/CNS integration involves modeling error during the UAV flight process.
Figure 7 illustrates the UAV position errors obtained by FKF, UKF-FKF, UKF-MODF and AFUKF-MODF, respectively. As shown in
Figure 7, the position error achieved by FKF is relatively large due to the influence of process-modeling error, the use of the covariance upper bound and the linearization of the process model. During the time period (100 s, 1000 s), the position errors in longitude, latitude and altitude for FKF are within (−23.0174 m, 20.7557 m), (−21.7712 m, 20.6464 m) and (−26.7975 m, 27.7306 m), respectively. UKF-FKF improves the fusion accuracy of FKF by adopting UKF to calculate the local state estimations, leading to the longitude, latitude and altitude errors within (−15.1817 m, 16.5516 m), (−16.5740 m, 15.9417 m) and (−21.8423 m, 24.0462 m). UKF-MODF can provide globally optimal fusion results based on the principle of linear minimum variance. Thus, it has higher navigation accuracy than FKF and UKF-FKF, leading to the longitude, latitude and altitude errors within (−12.0942 m, 11.8042 m), (−12.0311 m, 12.2480 m) and (−16.9458 m, 15.9384 m). However, its position error curve still has pronounced oscillations due to the influence of the process-modeling error. In contrast, the position errors in longitude, latitude and altitude for the proposed AFUKF-MODF are within (−7.1247 m, 7.8715 m), (−7.0576 m, 7.5495 m) and (−11.8677 m, 11.2610 m), which are much smaller than those by FKF, UKF-FKF and UKF-MODF. This is because the proposed AFUKF-MODF has the capability to inhibit the disturbances of process-modeling error.
Table 6 lists the mean absolute errors (MAEs) and standard deviations (STDs) of the position errors achieved by FKF, UKF-FKF, UKF-MODF and AFUKF-MODF. It can be seen that the MAE and STD of the position errors by the proposed AFUKF-MODF are also much smaller than those of the other three methods.
The above experimental results and analysis demonstrate that the proposed AFUKF-MODF enhances the adaptability and robustness of multi-sensor data fusion in presence of process-modeling errors, leading to improved navigation accuracy for INS/GNSS/CNS integration in comparison with FKF, UKF-FKF and UKF-MODF.















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}