A Glider-Assisted Link Disruption Restoration Mechanism in Underwater Acoustic Sensor Networks



Abstract
:1. Introduction
2. Related Work
3. The Glider-Assisted Link-Disruption Restoration Mechanism
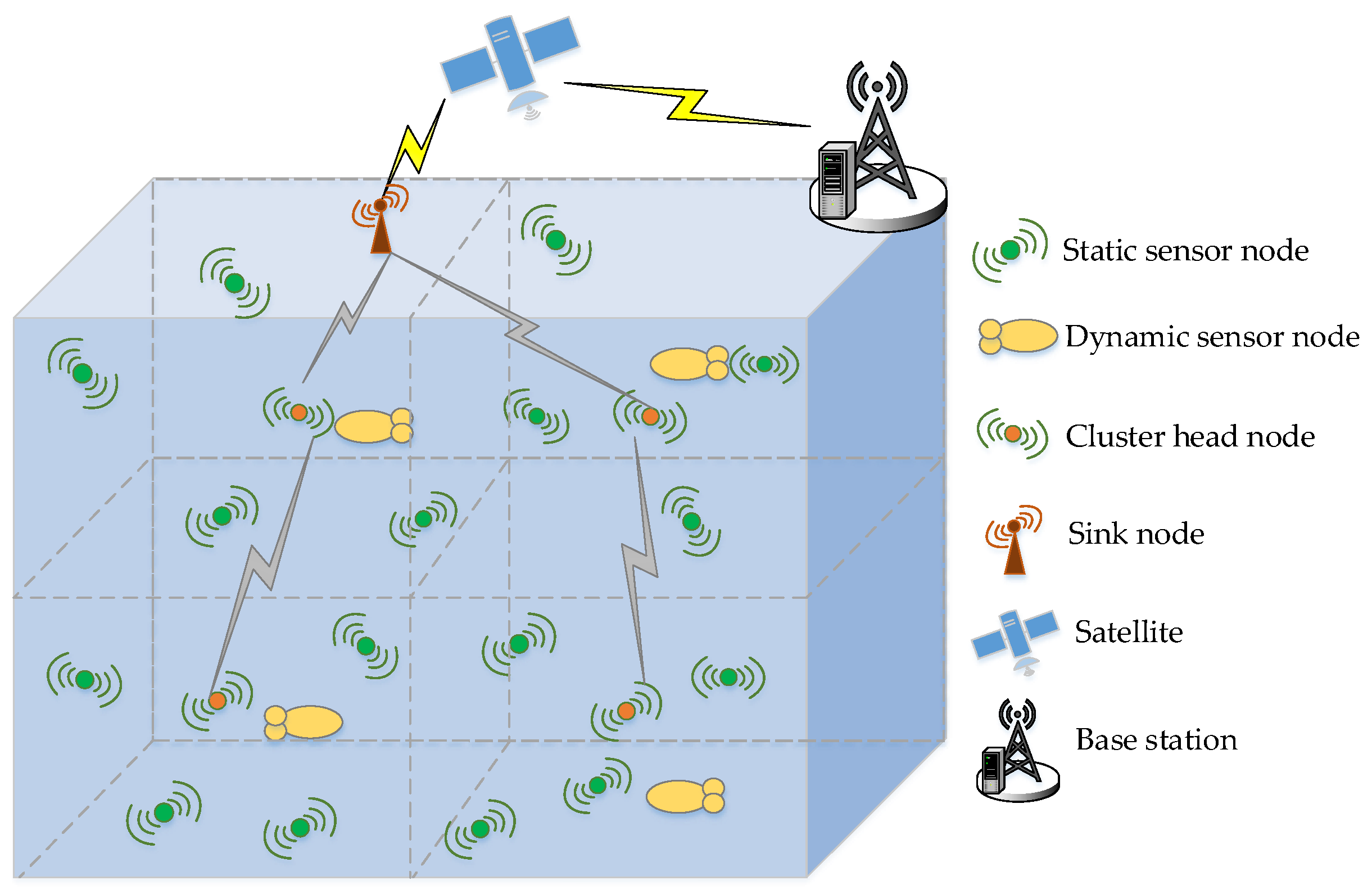
3.1. The Network Model
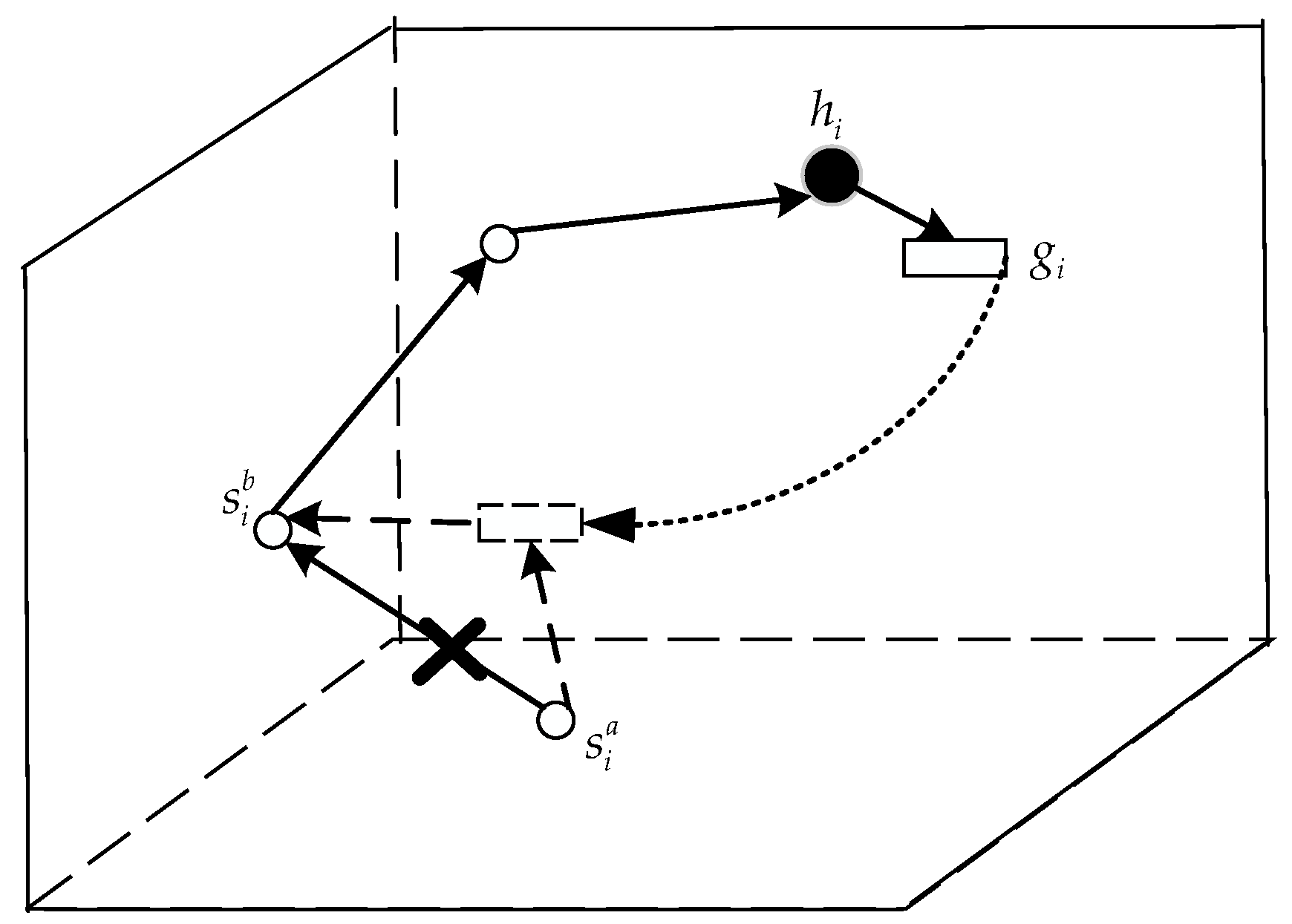
3.2. The Glider-Assisted Link Disruption Restoration Process
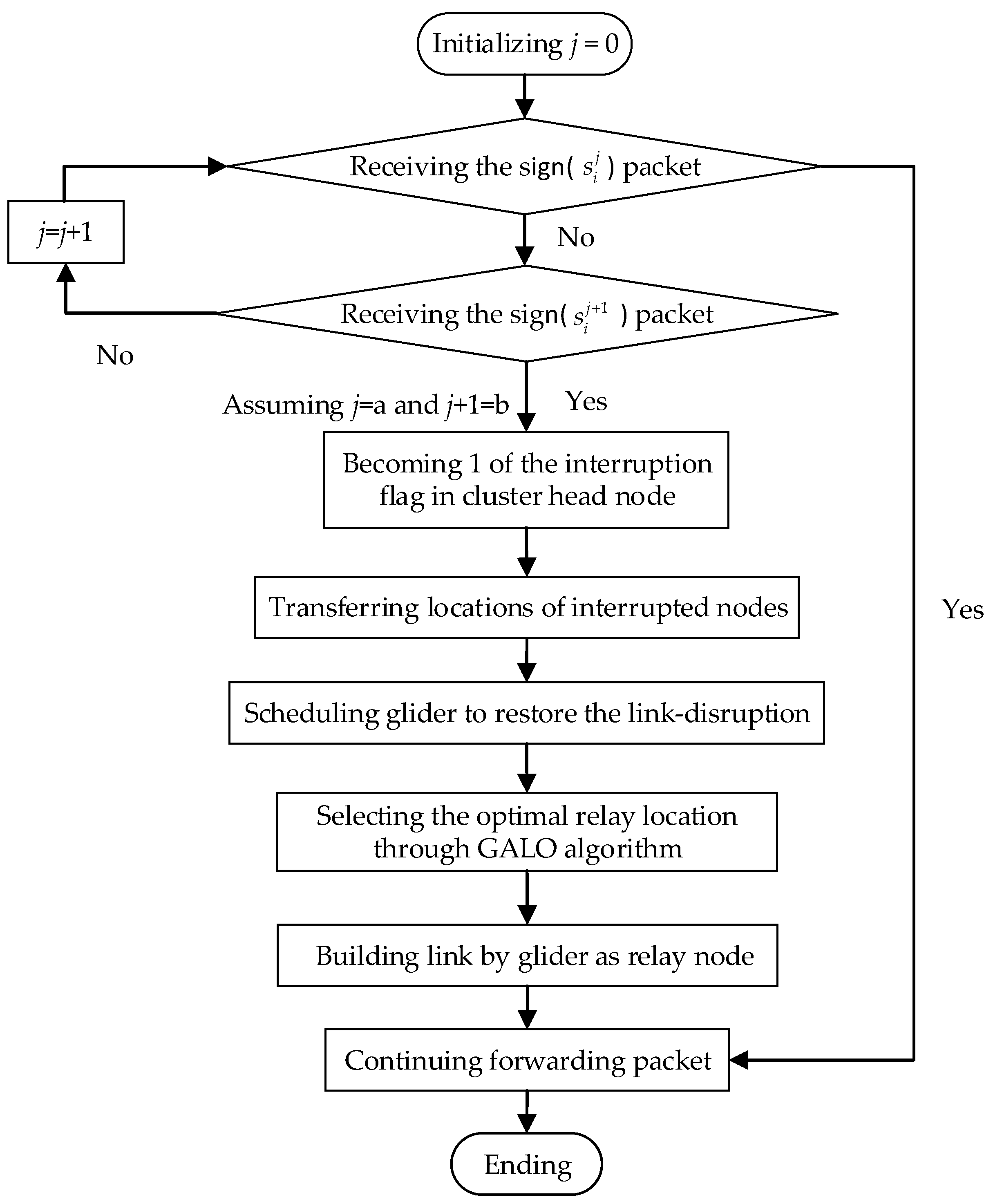
3.3. The LDR-GS Mechanism
- Step 1:
- The static sensor node sends data packet sign (), which contains the node’s own position information, to its cluster head node hi every time period.
- Step 2:
- If the cluster head hi receives the sign () packet sent by , it indicates that there is no disruption of all links between static node and the cluster head hi. If the cluster head hi does not receive the sign () packet sent by but receives the sign () packet of the next hop , then it judges the link ej,j+1 between and to be disrupted and the link disruption identifier in hi therein becomes δj,j+1 = 1. If the cluster head hi does not receive the sign () packet sent by , then it does j = j + 1 and continues to judge until the cluster head can receive from the next hop. Then the cluster head can judge the disrupted link eab, where b = a + 1. If there are some simultaneous link disruptions, the glider will prioritize the link closest to the cluster head node to ensure the connectivity of more nodes.
- Step 3:
- If the link disruption flag δab is 0, the glider completes the data forwarding and continues to collect data according to the original running track. If there is a link-disruption, that is the link disruption flag δab is not all 0, hi sends a repair (eab) packet containing the location information of the two nodes to gi when gi periodically approaches hi for data forwarding, and then starts scheduling the glider to repair the link disruption.
- Step 4:
- If gi receives the repair (eab) packet, the glider’s link interrupt flag becomes δab = 1. The disrupted link is repaired by selecting the appropriate trajectory according to the motion characteristics of the glider gi.
- Step 5:
- After gi completes the link-disruption restoring command issued by hi, the glider’s link interruption flag δab becomes 0, indicating that the link eab repair task delivered by the cluster head has been completed. In this case, gi returns to the original position again and sets the link disruption flag of hi to 0, and continues the environmental monitoring task.
4. The GALO Algorithm
4.1. The Problem Description
4.2. The Glider Movement Description
4.3. The GALO Algorithm
- Case 1:
- The glider’s trajectory intersects with the volume where the objective function is optimal.
- Case 2:
- The glider’s trajectory does not intersect with the volume where the objective function is optimal.
- Case 1:
- The glider’s trajectory intersects with the volume where the objective function is optimal. The problem can be solved by multiplier method (PHP) and the corresponding augmented Lagrange function is shown as (8):where λ = (λ1,λ2,λ3)T is the corresponding Lagrange multiplier vector. The corresponding multiplier iteration formula is shown as (9):The original problem (5) is converted to the following unconstrained optimization problem (10):By separately taking partial derivative of the variable x1,x2,x3 and making , the optimal solution can be obtained separately and then substituted into Equation (11) to calculate whether the termination rule is established:If Equation (11) works, the solution is the approximate optimal solution, and if not, it will be brought into Equation (9) to continue calculating for the next iteration until Equation (11) works. At this point, the optimal relay position of glider for link restoration is .
- Case 2:
- The glider’s trajectory does not intersect with the volume where the objective function is optimal. Since the glider’s trajectory is limited, the glider may not be able to go through the optimal position represented by Equation (5). The nearest point in the volume A1 to the volume A2 is selected as the sub-optimal solution. Volume A1 is the glider’s trajectory coverage volume and volume A2 is the zone defined by the C1 and C2 constraints. That is, the range indicated by the volume A1 is expressed by Equation (12), and the range indicated by the volume A2 is expressed by Equation (13):The original problem of Equation (5) is thus transformed into a new problem for solving the suboptimal solution, as shown in Equation (14). The solution obtained to achieve the shortest distance between the two regions is the sub-optimal solution of the original problem. It is the position for the glider to restore the link:
5. Performance Evaluation
5.1. Experimental Setting
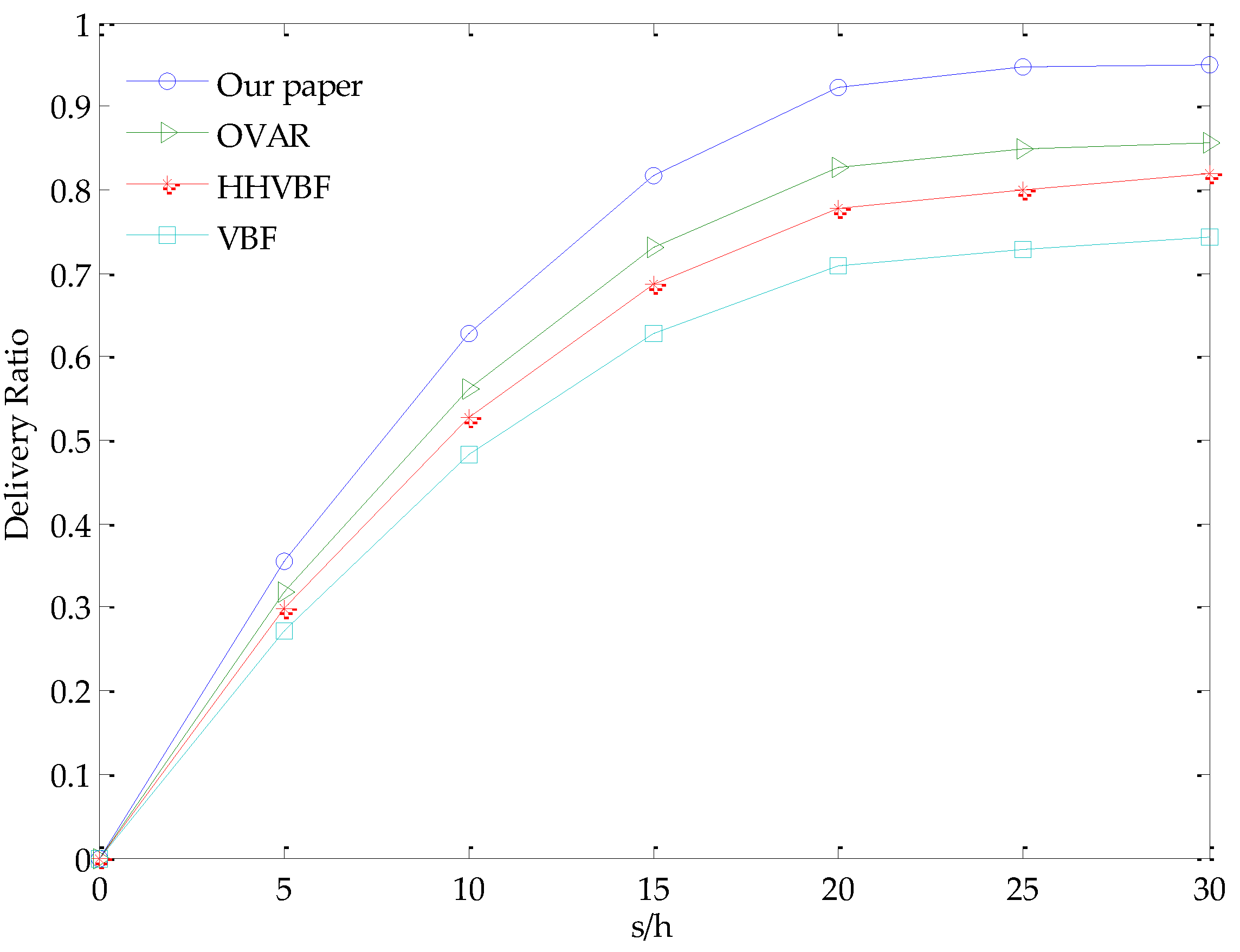
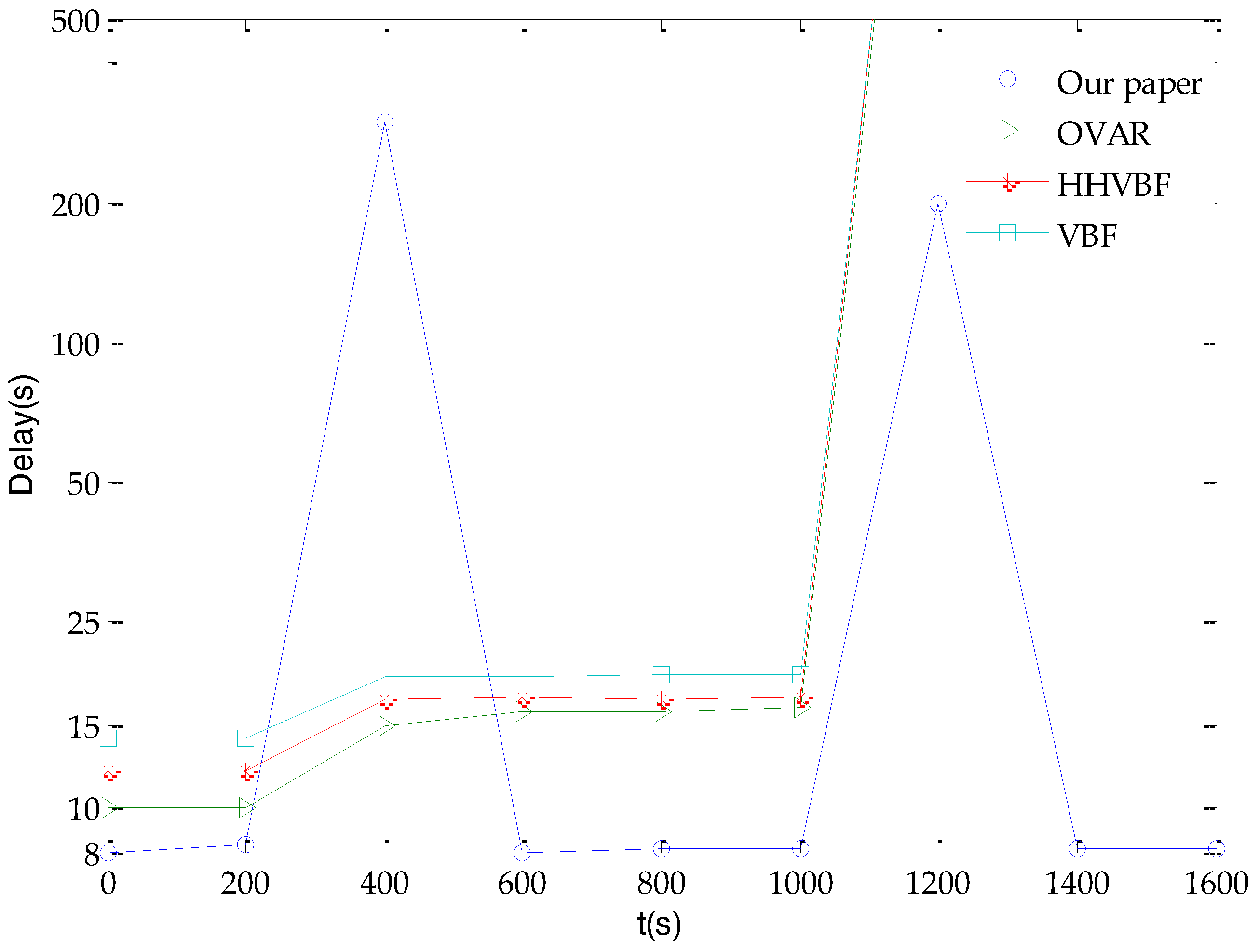
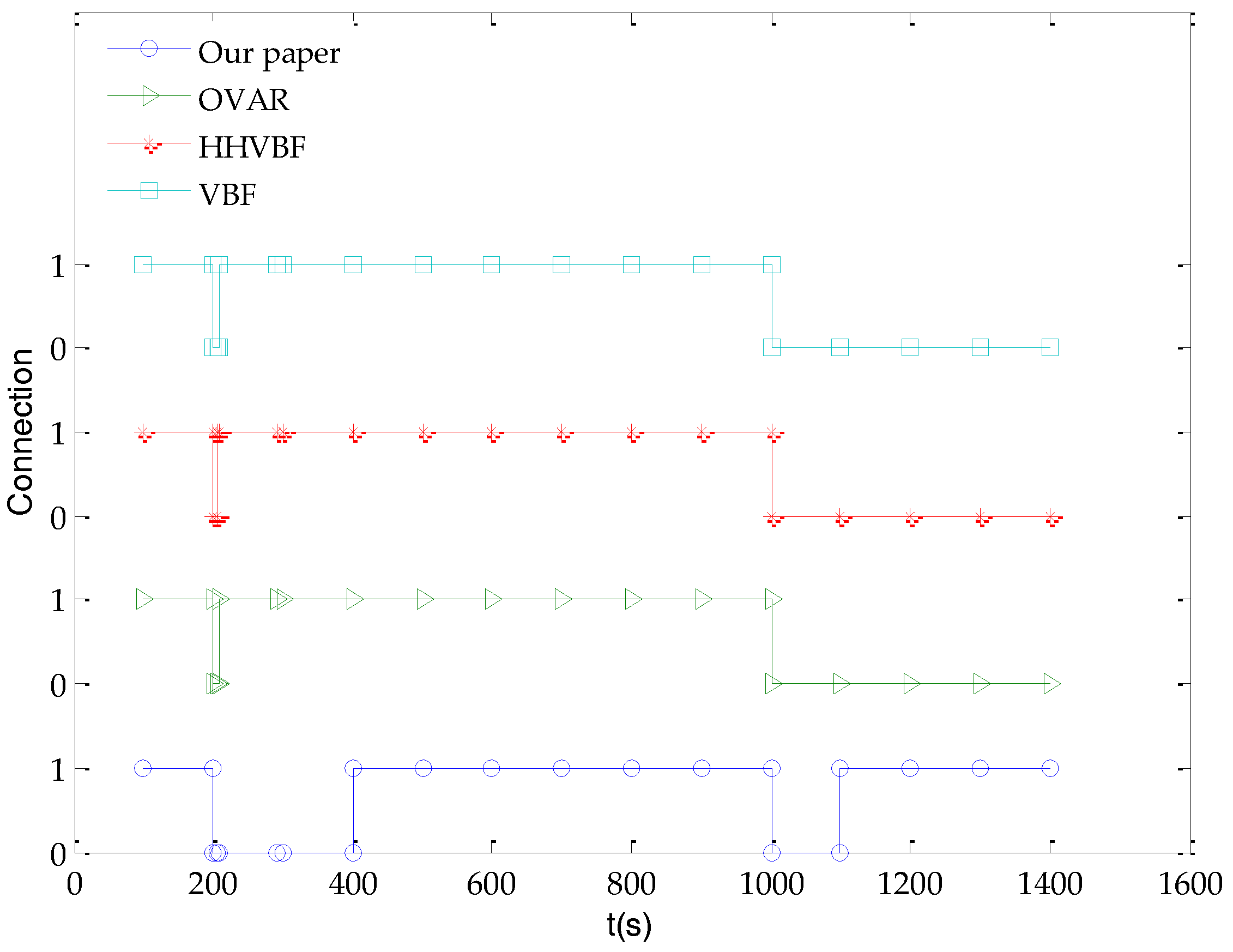
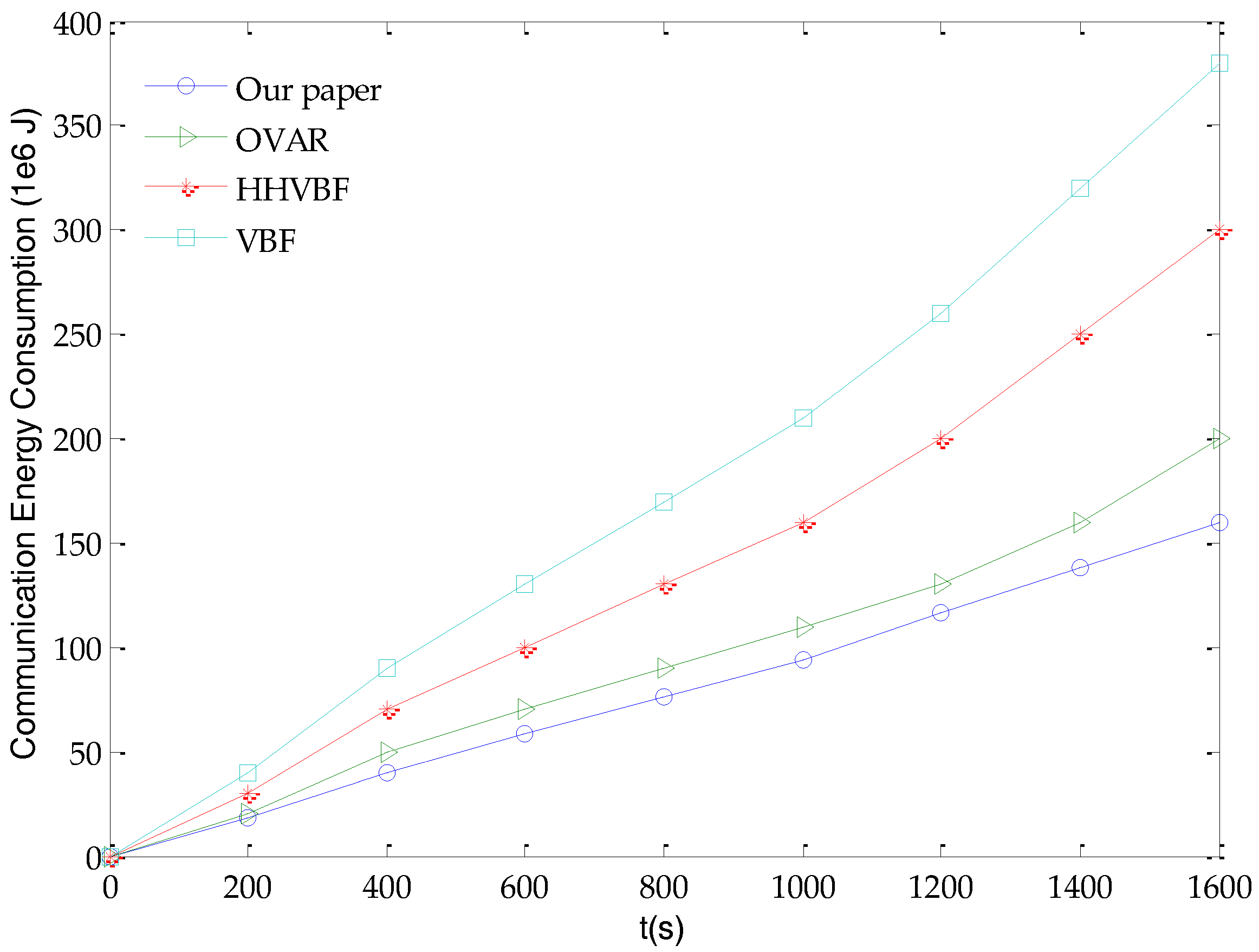
5.2. Evaluation with Different Parameters
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Peng, J.; Xu, Y.; Liu, J. A Distributed and Energy-Efficient Algorithm for Event K-Coverage in Underwater Sensor Networks. Sensors 2017, 17, 186. [Google Scholar]
- Akyildiz, I.F.; Pompili, D.; Melodia, T. Underwater acoustic sensor networks: Research challenges. Ad Hoc Netw. 2005, 3, 257–279. [Google Scholar] [CrossRef]
- Taehee Won, S.P. Design and Implementation of an Omni-Directional Underwater Acoustic Micro-Modem Based on a Low-Power Micro-Controller Unit. Sensors 2012, 12, 2309–2323. [Google Scholar]
- Lloret, J. Underwater sensor nodes and networks. Sensors 2013, 13, 11782–11796. [Google Scholar] [CrossRef] [PubMed]
- Sendra, S.; Lloret, J.; Jimenez, J.M.; Parra, L. Underwater Acoustic Modems. IEEE Sens. J. 2016, 16, 4063–4071. [Google Scholar] [CrossRef]
- Latif, K.; Javaid, N.; Ahmad, A.; Khan, Z.A.; Alrajeh, N.; Khan, M.I. On Energy Hole and Coverage Hole Avoidance in Underwater Wireless Sensor Networks. IEEE Sens. J. 2016, 16, 4431–4442. [Google Scholar] [CrossRef]
- Nguyen, S.T.; Cayirci, E.; Yan, L.; Rong, C. A shadow zone aware routing protocol for acoustic underwater sensor networks. IEEE Commun. Lett. 2009, 13, 366–368. [Google Scholar] [CrossRef]
- Mahboubi, H.; Vaezi, M.; Labeau, F. Mobile Sensors Deployment Subject to Location Estimation Error. IEEE Trans. Veh. Technol. 2017, 66, 668–678. [Google Scholar] [CrossRef]
- Chen, B.; Pompili, D. Modeling position uncertainty of networked autonomous underwater vehicles. Ad Hoc Netw. 2015, 34, 184–195. [Google Scholar] [CrossRef]
- Liu, F.; Wang, Y.; Niu, W.; Ma, Z.; Liu, Y. Hydrodynamic performance analysis and experiments of a hybrid underwater glider with different layout of wings. In Proceedings of the Oceans 2014, Taipei, Taiwan, 7–10 April 2014; pp. 1–5. [Google Scholar]
- Liu, F.; Wang, Y.; Wang, S. Development of the Hybrid Underwater Glider PetreI-II. Sea Technol. 2014, 55, 51–54. [Google Scholar]
- Sheng, M.; Li, X.; Wang, X.; Xu, C. Topology Control with Successive Interference Cancellation in Cognitive Radio Networks. IEEE Trans. Commun. 2017, 65, 37–48. [Google Scholar] [CrossRef]
- Ghoreyshi, S.M.; Shahrabi, A.; Boutaleb, T. A Novel Cooperative Opportunistic Routing Scheme for Underwater Sensor Networks. Sensors 2016, 16, 297. [Google Scholar] [CrossRef] [PubMed]
- Zhang, Y.; Chen, W.; Liang, J.; Zheng, B.; Jiang, S. A Network Topology Control and Identity Authentication Protocol with Support for Movable Sensor Nodes. Sensors 2015, 15, 29958–29969. [Google Scholar] [CrossRef] [PubMed]
- Jin, Z.; Ma, Y.; Su, Y.; Li, S.; Fu, X. A Q-Learning-Based Delay-Aware Routing Algorithm to Extend the Lifetime of Underwater Sensor Networks. Sensors 2017, 17, 1660. [Google Scholar] [CrossRef] [PubMed]
- Santos, R.; Orozco, J.; Micheletto, M.; Ochoa, S.F.; Meseguer, R.; Millan, P.; Molina, A.C. Real-Time Communication Support for Underwater Acoustic Sensor Networks. Sensors 2017, 17, 1629. [Google Scholar] [CrossRef] [PubMed]
- Guo, Y.B.; Guo, Y.B.; Zhan, Y.Z. Security Topology Control Method for Wireless Sensor Networks with Node-Failure Tolerance Based on Self-Regeneration; Hindawi Publishing Corp.: Cairo, Egypt, 2010; pp. 1–11. [Google Scholar]
- Carmen, D.M. A Topology Reorganization Scheme for Reliable Communication in Underwater Wireless Sensor Networks Affected by Shadow Zones. Sensors 2009, 9, 8684–8708. [Google Scholar] [Green Version]
- Dong, C.; Guo, L.; Yin, J. Coverage control study of mobile uwasns nodes based on particle swarm optimization algorithm. In Proceedings of the 11th ACM International Conference on Underwater Networks & Systems, Shanghai, China, 24–26 October 2016; p. 52. [Google Scholar]
- Pandey, P.; Hajimirsadeghi, M.; Pompili, D. Region of Feasibility of Interference Alignment in Underwater Sensor Networks. IEEE J. Ocean. Eng. 2014, 39, 189–202. [Google Scholar] [CrossRef]
- Ibrahim, S.; Al-Bzoor, M.; Liu, J.; Ammar, R.; Rajasekaran, S.; Cui, J.H. General optimization framework for surface gateway deployment problem in underwater sensor networks. EURASIP J. Wirel. Commun. Netw. 2013, 2013, 128. [Google Scholar] [CrossRef]
- Pompili, D.; Melodia, T.; Akyildiz, I.F. Three-dimensional and two-dimensional deployment analysis for underwater acoustic sensor networks. Ad Hoc Netw. 2009, 4, 778–790. [Google Scholar] [CrossRef]
- Liu, J.; Wang, Z.; Peng, Z.; Cui, J.H. Suave: Swarm underwater autonomous vehicle localization. In Proceedings of the IEEE INFOCOM 2014—IEEE Conference on Computer Communications, Toronto, ON, Canada, 27 April–2 May 2014; pp. 64–72. [Google Scholar]
- Yoon, S.; Azad, A.K.; Oh, H.; Kim, S. AURP: An AUV-Aided Underwater Routing Protocol for Underwater Acoustic Sensor Networks. Sensors 2012, 12, 1827–1845. [Google Scholar] [CrossRef] [PubMed]
- Liu, Z.; Guan, Q.; Chen, F.; Liu, Y. Outage probability analysis for unmanned underwater vehicle based relaying. In Proceedings of the 11th ACM International Conference on Underwater Networks & Systems, Shanghai, China, 24–26 October 2016; p. 33. [Google Scholar]
- Xie, P.; Cui, J.H.; Lao, L. VBF: Vector-Based Forwarding Protocol for Underwater Sensor Networks. In Proceedings of the 5th international IFIP-TC6 conference on Networking Technologies, Services, and Protocols; Performance of Computer and Communication Networks; Mobile and Wireless Communications Systems, Coimbra, Portugal, 15–19 May 2006. [Google Scholar]
- Nicolaou, N.; See, A.; Xie, P.; Cui, J.H.; Maggiorini, D. Improving the Robustness of Location-Based Routing for Underwater Sensor Networks. In Proceedings of the Oceans 2007, Aberdeen, UK, 18–21 June 2007; pp. 1–6. [Google Scholar]
- Yan, H.; Zhou, S.; Shi, Z.J.; Li, B. A DSP implementation of OFDM acoustic modem. In Proceedings of the Workshop on Underwater Networks, Montreal, QC, Canada, 14 September 2007; pp. 89–92. [Google Scholar]
- Xie, P.; Zhou, Z.; Peng, Z.; Yan, H. Aqua-Sim: An NS-2 based simulator for underwater sensor networks. In Proceedings of the MTS/IEEE Biloxi—Marine Technology for Our Future: Global and Local Challenges (OCEANS 2009), Biloxi, MS, USA, 26–29 October 2009; pp. 1–7. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Name | Values |
|---|---|
| Monitoring volume | 6 km × 4 km × 4 km |
| Transmission speed | 1.5 km/s |
| Transmission range | 1.5 km |
| DATA packet size | 300 B |
| Maximum gliding depth | 4 km |
| steady-state gliding maximum pitch angle | 69.5° |
| steady-state gliding minimum pitch angle | 9.2° |
| Maximum gliding speed | 2 Kn (1.852 km/h) |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jin, Z.; Wang, N.; Su, Y.; Yang, Q. A Glider-Assisted Link Disruption Restoration Mechanism in Underwater Acoustic Sensor Networks. Sensors 2018, 18, 501. https://doi.org/10.3390/s18020501
Jin Z, Wang N, Su Y, Yang Q. A Glider-Assisted Link Disruption Restoration Mechanism in Underwater Acoustic Sensor Networks. Sensors. 2018; 18(2):501. https://doi.org/10.3390/s18020501
Chicago/Turabian StyleJin, Zhigang, Ning Wang, Yishan Su, and Qiuling Yang. 2018. "A Glider-Assisted Link Disruption Restoration Mechanism in Underwater Acoustic Sensor Networks" Sensors 18, no. 2: 501. https://doi.org/10.3390/s18020501
APA StyleJin, Z., Wang, N., Su, Y., & Yang, Q. (2018). A Glider-Assisted Link Disruption Restoration Mechanism in Underwater Acoustic Sensor Networks. Sensors, 18(2), 501. https://doi.org/10.3390/s18020501