Efficient Deployment of Key Nodes for Optimal Coverage of Industrial Mobile Wireless Networks

Abstract
:1. Introduction
- (1)
- Using the trajectory discretization method, static and mobile node coverage is simplified into a one-dimensional target coverage problem. From the perspective of a virtual cluster’s interior, we simplify the target coverage to a maximal clique problem by developing and analyzing a mathematical model.
- (2)
- We divide the problem into two stages. In the first stage, for full target coverage and improved real-time performance, a distributed double-layer Tabu search is employed to solve the optimal number and position of cluster heads. In the second stage, we use an improved virtual force and a virtual cluster head movement to redeploy the position of the cluster heads.
2. Related Works
3. Preliminaries
3.1. Network Model and Hypothesis
3.2. Network Model and Hypothesis
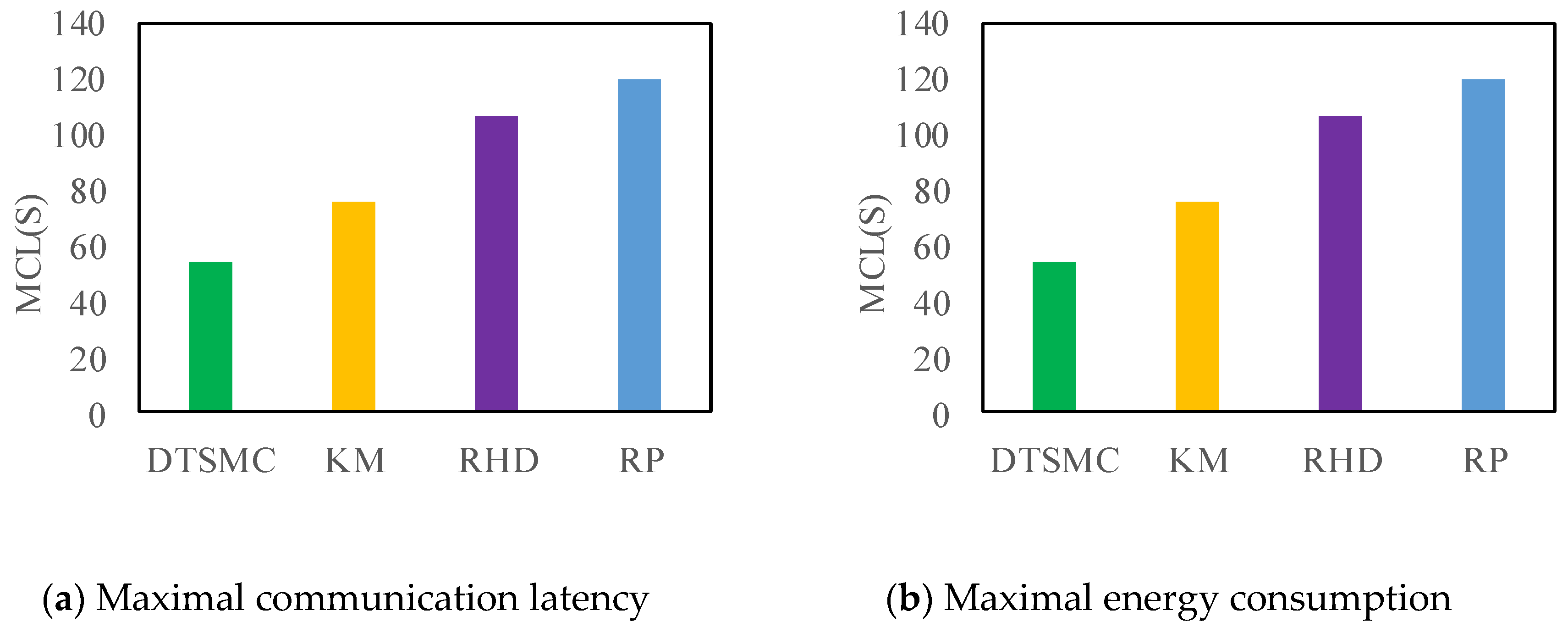
3.3. Maximal Communication Latency and Maximal Energy Consumption
4. Our System Model (Proposed Methods)
4.1. Optimal Cluster Head Coverage Problem—Stage I
| Algorithm 1: The double-layer Tabu search maximal clique (DTSMC). | |
| Input: , Degree () and N() Output: | |
| 1 | Initialization: randomly select the min degree vertex Current from , Tabu_first_set = ø, Tabu_second_set = ø, = ø, Ci = ø, p_next = ε, P_left = |
| 2 | for j = 1; j ≤ |P_left|; j++ do // Find maximal clique of subgraph |
| 3 | Candi_set = N(); |
| 4 | while |Candi_set| ≠ ø // Find the maximum clique at the current node |
| 5 | Randomly select a vertex p_next from Candi_set; |
| 6 | if p_next ∈ // Evaluate common neighbor nodes |
| 7 | Cj ← Cj ∪ {p_next }; |
| 8 | Tabu_second_set ← Tabu_second_set ∪ {p_next}; // Update second-level Tabu list |
| 9 | Candi_set ← − Cj; // |
| 10 | end if |
| 11 | end while |
| 12 | for k = 1, K = |Cj| |
| 13 | if degree() = |Cj| − 1 // Compute the node degree |
| 14 | P_left ← P_left/; // Update second-level candidate solution list |
| 15 | Tabu_firt_set = − P_left; // Update first-level Tabu list |
| 16 | end if |
| 17 | end for |
| 18 | = + Cj; |
| 19 | end for |
| 20 | Return //Return all maximal clique |
4.2. Minimum Inter-Cluster Interference Problem—Stage II
| Algorithm 2: The minimum inter-cluster interference strategy based on improved virtual force and motion. | |
| Input: and NAP, , FTH Output: APPositon_new | |
| 1 | Initialization: Max_interation; C; |
| 2 | While (h < Max_interation) |
| 3 | if |
| 4 | for j = 1; j ≤ |AP|; j++ do |
| 5 | Calculate the virtual force of apj according to Equations (15)–(18); |
| 6 | if > 0 |
| 7 | Calculate the maximum move distance dp according to Equation (20); |
| 8 | if dp > dmove_step // Ensure that the cluster head covers its target points |
| 9 | din ← dmove_step |
| 10 | else |
| 11 | din ← dp |
| 12 | end if |
| 13 | Update the new position of according to Equation (22) |
| 14 | if apposition_new ∈ A // Evaluate whether the new position is in A |
| 15 | apposition_new ← chposition_new |
| 16 | else |
| 17 | apposition_old ← the corresponding boundary value of A |
| 18 | end if |
| 19 | Move the cluster head to the new position |
| 20 | apposition_new ← chposition_new |
| 21 | end if |
| 22 | Compute the total virtual force of the entire network |
| 23 | end for |
| 24 | end if |
| 25 | end while |
| 26 | Return APPosition_new // Return the new position of the cluster heads |
5. Simulation Results
5.1. Experimental Environment
5.2. Results Analysis
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Wollschlaeger, M.; Sauter, T.; Jasperneite, J. The Future of Industrial Communication: Automation Networks in the Era of the Internet of Things and Industry 4.0. IEEE Ind. Electron. Mag. 2017, 11, 17–27. [Google Scholar] [CrossRef]
- Wan, J.; Xia, M. Cloud-Assisted Cyber-Physical Systems for the Implementation of Industry 4.0. Mob. Netw. Appl. 2017, 22, 1157–1158. [Google Scholar] [CrossRef]
- Li, D.; Li, X.; Wan, J. A Cloud-Assisted Handover Optimization Strategy for Mobile Nodes in Industrial Wireless Networks. Comput. Netw. 2017, 128, 133–141. [Google Scholar] [CrossRef]
- Zheng, T.; Gidlund, M.; Åkerberg, J. WirArb: A New MAC Protocol for Time Critical Industrial Wireless Sensor Network Applications. IEEE Sens. J. 2016, 16, 2127–2139. [Google Scholar] [CrossRef]
- Jia, D.; Zhu, H.; Zou, S.; Hu, F. Dynamic Cluster Head Selection Method for Wireless Sensor Network. IEEE Sens. J. 2016, 16, 2746–2754. [Google Scholar] [CrossRef]
- Wei, D.; Jin, Y.; Vural, S.; Moessner, K.; Tafazolli, R. An Energy-Efficient Clustering Solution for Wireless Sensor Networks. IEEE Trans. Wirel. Commun. 2011, 10, 3973–3983. [Google Scholar] [CrossRef] [Green Version]
- Hu, S.; Han, J.; Wei, X.; Chen, Z. A multi-hop heterogeneous cluster-based optimization algorithm for wireless sensor networks. Wirel. Netw. 2015, 21, 57–65. [Google Scholar] [CrossRef]
- Shu, L.; Mukherjee, M.; Hu, L.; Bergmann, N.; Zhu, C. Geographic Routing in Duty-Cycled Industrial Wireless Sensor Networks with Radio Irregularity. IEEE Access 2017, 4, 9043–9052. [Google Scholar] [CrossRef]
- Shu, L.; Mukherjee, M.; Wu, X. Toxic gas boundary area detection in large-scale petrochemical plants with industrial wireless sensor networks. IEEE Commun. Mag. 2016, 54, 22–28. [Google Scholar] [CrossRef]
- Wang, J.; Kim, J.U.; Shu, L.; Niu, Y.; Lee, S. A Distance-based Energy Aware Routing algorithm for wireless sensor networks. Sensors 2010, 10, 9493–9511. [Google Scholar] [CrossRef] [PubMed]
- Li, X.; Li, D.; Wan, J.; Liu, C.; Imran, M. Adaptive Transmission Optimization in SDN-based Industrial Internet of Things with Edge Computing. IEEE Internet Things J. 2018. [Google Scholar] [CrossRef]
- Deif, D.S.; Gadallah, Y. Classification of Wireless Sensor Networks Deployment Techniques. IEEE Commun. Surv. Tutor. 2014, 16, 834–855. [Google Scholar] [CrossRef]
- Jiang, Z.; Zhou, S.; Niu, Z. Optimal Antenna Cluster Size in Cell-Free Large-Scale Distributed Antenna Systems with Imperfect CSI and Intercluster Interference. IEEE Trans. Veh. Technol. 2015, 64, 2834–2845. [Google Scholar]
- Chen, S.; Cheng, R.S. Clustering for Interference Alignment in Multiuser Interference Network. IEEE Trans. Veh. Technol. 2014, 63, 2613–2624. [Google Scholar] [CrossRef]
- Gu, Y.; Ji, Y.; Li, J.; Zhao, B. Covering Targets in Sensor Networks: From Time Domain to Space Domain. IEEE Trans. Parallel Distrib. Syst. 2012, 23, 1643–1656. [Google Scholar] [CrossRef]
- Zorbas, D.; Glynos, D.; Kotzanikolaou, P.; Douligeris, C. Solving coverage problems in wireless sensor networks using cover sets. Ad Hoc Netw. 2010, 8, 400–415. [Google Scholar] [CrossRef]
- Dimple, M.; Man, J. Maximum coverage heuristics (MCH) for target coverage problem in Wireless Sensor Network. In Proceedings of the 2014 IEEE International Advance Computing Conference (IACC), Gurgaon, India, 21–22 February 2014; pp. 300–305. [Google Scholar]
- Lu, Z.; Li, W.W.; Pan, M. Maximum Lifetime Scheduling for Target Coverage and Data Collection in Wireless Sensor Networks. IEEE Trans. Veh. Technol. 2015, 64, 714–727. [Google Scholar] [CrossRef]
- Willson, J.; Zhang, Z.; Wu, W.; Du, D.Z. Fault-tolerant coverage with maximum lifetime in wireless sensor networks. In Proceedings of the 2015 IEEE Conference on Computer Communications (INFOCOM), Kowloon, Hong Kong, 26 April–1 May 2015; pp. 1364–1372. [Google Scholar]
- Chen, Z.; Gao, X.; Wu, F.; Chen, G. A PTAS to minimize mobile sensor movement for target coverage problem. In Proceedings of the IEEE INFOCOM 2016—IEEE Conference on Computer Communications, San Francisco, CA, USA, 10–14 April 2016; pp. 1–9. [Google Scholar]
- Liao, Z.; Wang, J.; Zhang, S.; Cao, J.; Min, G. Minimizing Movement for Target Coverage and Network Connectivity in Mobile Sensor Networks. IEEE Trans. Parallel Distrib. Syst. 2015, 26, 1971–1983. [Google Scholar] [CrossRef]
- Mahboubi, H.; Aghdam, A.G. Distributed Deployment Algorithms for Coverage Improvement in a Network of Wireless Mobile Sensors: Relocation by Virtual Force. IEEE Trans. Control Netw. Syst. 2016, 4, 736–748. [Google Scholar] [CrossRef]
- Ovsthus, K.; Kristensen, L.M. An Industrial Perspective on Wireless Sensor Networks—A Survey of Requirements, Protocols, and Challenges. IEEE Commun. Surv. Tutor. 2014, 16, 1391–1412. [Google Scholar]
- Li, X.; Li, D.; Wan, J.; Vasilakos, A.V.; Lai, C.F.; Wang, S. A review of industrial wireless networks in the context of Industry 4.0. Wirel. Netw. 2015, 23, 1–19. [Google Scholar] [CrossRef]
- Han, G.; Liu, L.; Jiang, J.; Shu, L.; Hancke, G. Analysis of Energy-Efficient Connected Target Coverage Algorithms for Industrial Wireless Sensor Networks. IEEE Trans. Ind. Inform. 2017, 13, 135–143. [Google Scholar] [CrossRef]
- Lin, C.C.; Deng, D.J.; Chen, Z.Y.; Chen, K.C. Key design of driving industry 4.0: Joint energy-efficient deployment and scheduling in group-based industrial wireless sensor networks. IEEE Commun. Mag. 2016, 54, 46–52. [Google Scholar] [CrossRef]
- Gholami, M.; Brennan, R.W. A Comparison of Alternative Distributed Dynamic Cluster Formation Techniques for Industrial Wireless Sensor Networks. Sensors 2016, 16, 65. [Google Scholar] [CrossRef] [PubMed]
- Lee, J.H.; Kwon, T.; Song, J.S. Group Connectivity Model for Industrial Wireless Sensor Networks. IEEE Trans. Ind. Electron. 2010, 57, 1835–1844. [Google Scholar]
- Hsieh, H.Y.; Juan, T.C.; Tsai, Y.D.; Huang, H.C. Minimizing Radio Resource Usage for Machine-to-Machine Communications through Data-Centric Clustering. IEEE Trans. Mob. Comput. 2016, 15, 3072–3086. [Google Scholar] [CrossRef]
- Wu, T.; Biswas, S. Minimizing inter-cluster interference by self-reorganizing MAC allocation in sensor networks. Wirel. Netw. 2007, 13, 691–703. [Google Scholar] [CrossRef]
- Al-Shawaqfeh, M.; Abu-El-Haija, A.; Rahman, M.J.A. Collision avoidance slot allocation scheme for multi-cluster wireless sensor networks. Wirel. Netw. 2013, 19, 1187–1201. [Google Scholar] [CrossRef]
- Luo, H.; Liao, J.; Sun, Y. Efficient Sleep Scheduling for Avoiding Inter-Cluster Interference in Wireless Sensor Networks. In Proceedings of the 2013 IEEE Ninth International Conference on Mobile Ad-hoc and Sensor Networks (MSN), Dalian, China, 11–13 December 2013; pp. 414–420. [Google Scholar]
- Moon, J.M.; Cho, D.H. Efficient Cell-Clustering Algorithm for Inter-Cluster Interference Mitigation in Network MIMO Systems. IEEE Commun. Lett. 2011, 15, 326–328. [Google Scholar] [CrossRef]
- Zhang, Z.; Zhang, W.; Chao, H.C.; Lai, C.F. Toward Belief Function Based Cooperative Sensing for Interference Resistant Industrial Wireless Sensor Networks. IEEE Trans. Ind. Inform. 2016, 12, 2115–2126. [Google Scholar] [CrossRef]
- Newman, M.E. Fast algorithm for detecting community structure in networks. Phys. Rev. E Stat. Nonlinear Soft Matter Phys. 2004, 69 6 Pt 2, 066133. [Google Scholar] [CrossRef] [PubMed]
- Wu, P.F.; Xiao, F.; Sha, C.; Huang, H.P.; Wang, R.C.; Xiong, N.X. Node Scheduling Strategies for Achieving Full-View Area Coverage in Camera Sensor Networks. Sensors 2017, 17, 1303. [Google Scholar] [CrossRef] [PubMed]
- Vales-Alonso, J.; Alcaraz, J.J. On the optimal random deployment of wireless sensor networks in non-homogeneous scenarios. Ad Hoc Netw. 2013, 11, 846–860. [Google Scholar] [CrossRef]
- Yu, G.J.; Yeh, K.Y. A K-Means Based Small Cell Deployment Algorithm for Wireless Access Networks. In Proceedings of the 2016 International Conference on Networking and Network Applications (NaNA), Hokkaido, Japan, 23–25 July 2016; pp. 393–398. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Description |
|---|---|---|
| R | 50, 100, 150, 200 | Communication radius |
| n | 50, 60, 70, 80, 90, 100 | Number of target points |
| FTH | 0 | Virtual force threshold |
| Di | 100 Mb | Communication load of wireless node |
| Dmax | 500 Mb | Maximum allowable communication load |
| 0.1 J/Mb | Coefficient of communication energy consumption | |
| 0.08 J/Mb | Coefficient of wireless channel energy consumption | |
| Prob | 20% | Data recommunication probability |
| Vc | 10 Mb/s | Communication rate |
| Dmove_step | 10, 20, 30 | Moving step length |
| Max_iterations | 100 | Number of iterations |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, X.; Li, D.; Dong, Z.; Hu, Y.; Liu, C. Efficient Deployment of Key Nodes for Optimal Coverage of Industrial Mobile Wireless Networks. Sensors 2018, 18, 545. https://doi.org/10.3390/s18020545
Li X, Li D, Dong Z, Hu Y, Liu C. Efficient Deployment of Key Nodes for Optimal Coverage of Industrial Mobile Wireless Networks. Sensors. 2018; 18(2):545. https://doi.org/10.3390/s18020545
Chicago/Turabian StyleLi, Xiaomin, Di Li, Zhijie Dong, Yage Hu, and Chengliang Liu. 2018. "Efficient Deployment of Key Nodes for Optimal Coverage of Industrial Mobile Wireless Networks" Sensors 18, no. 2: 545. https://doi.org/10.3390/s18020545
APA StyleLi, X., Li, D., Dong, Z., Hu, Y., & Liu, C. (2018). Efficient Deployment of Key Nodes for Optimal Coverage of Industrial Mobile Wireless Networks. Sensors, 18(2), 545. https://doi.org/10.3390/s18020545