An Unsupervised Change Detection Method Using Time-Series of PolSAR Images from Radarsat-2 and GaoFen-3



Abstract
:
1. Introduction
2. Materials and Methods
2.1. Omnibus Test Statistic
2.2. Rj Test Statistic
2.3. Generalized Statistical Region Merging (GSRM)
2.4. Generalized Gaussian Mixture Model (GGMM)
2.5. Quantitative Evaluation Criteria
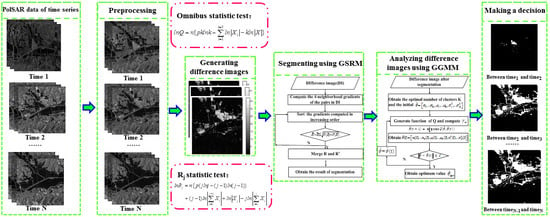
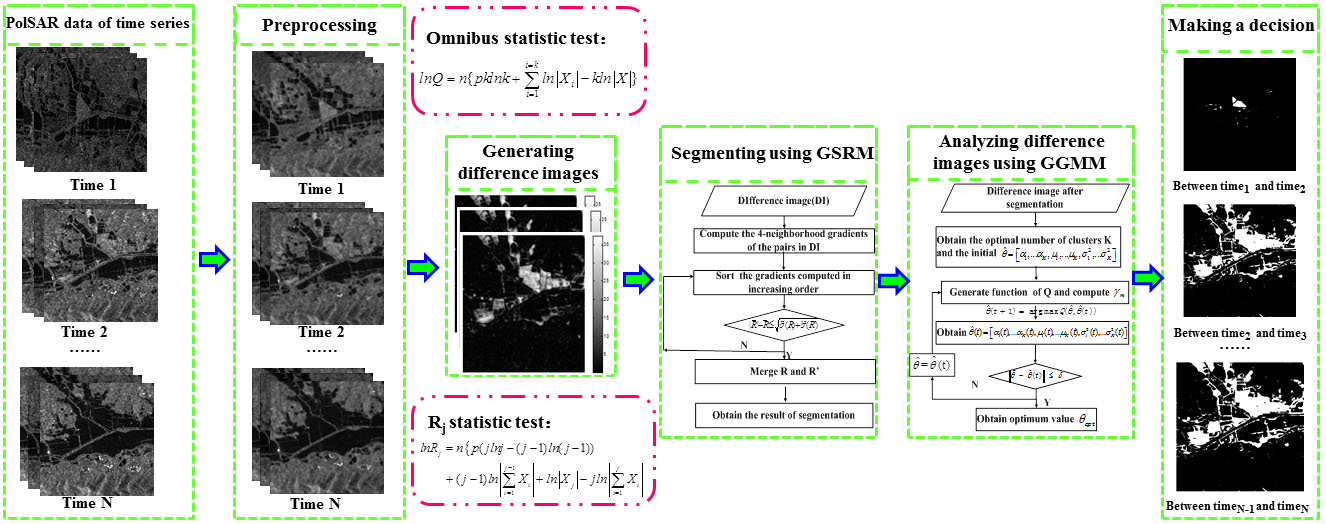
2.6. The Proposed Method of Time Series Change Detection Using Images from Different Sensors
3. Experiments and Results
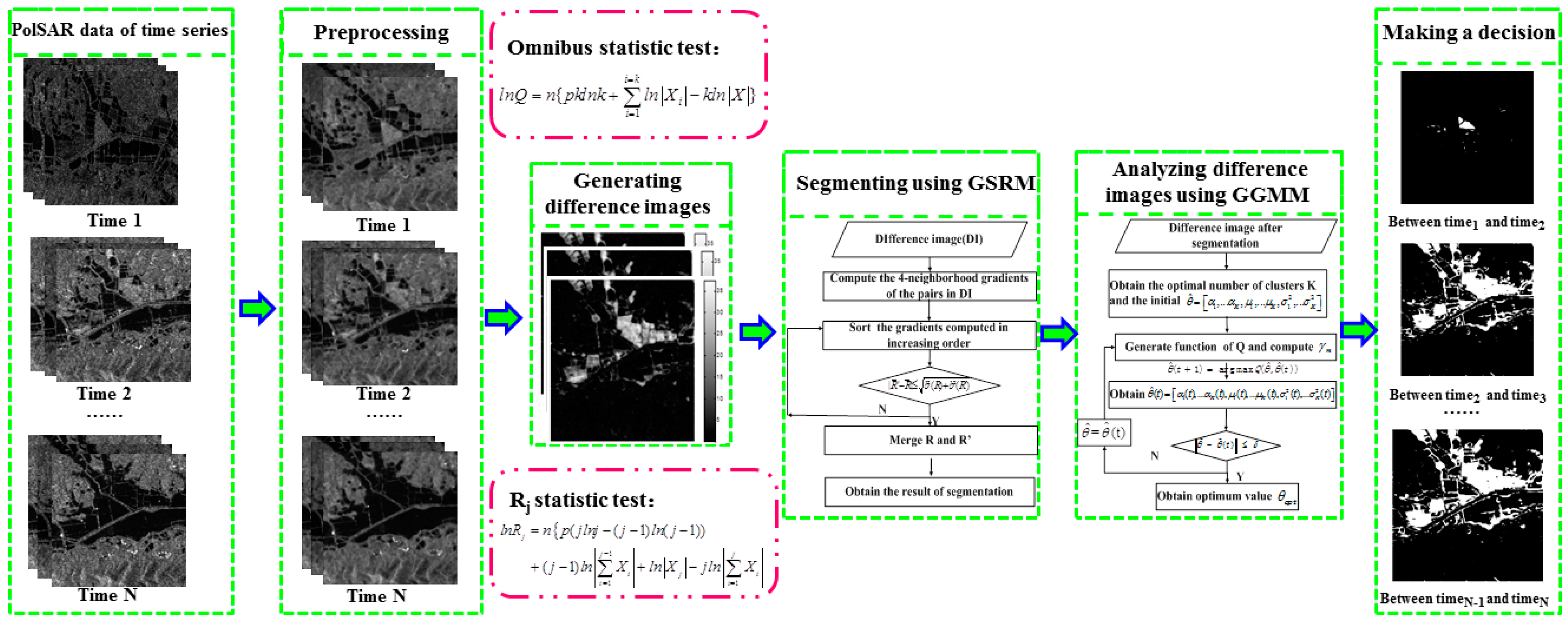
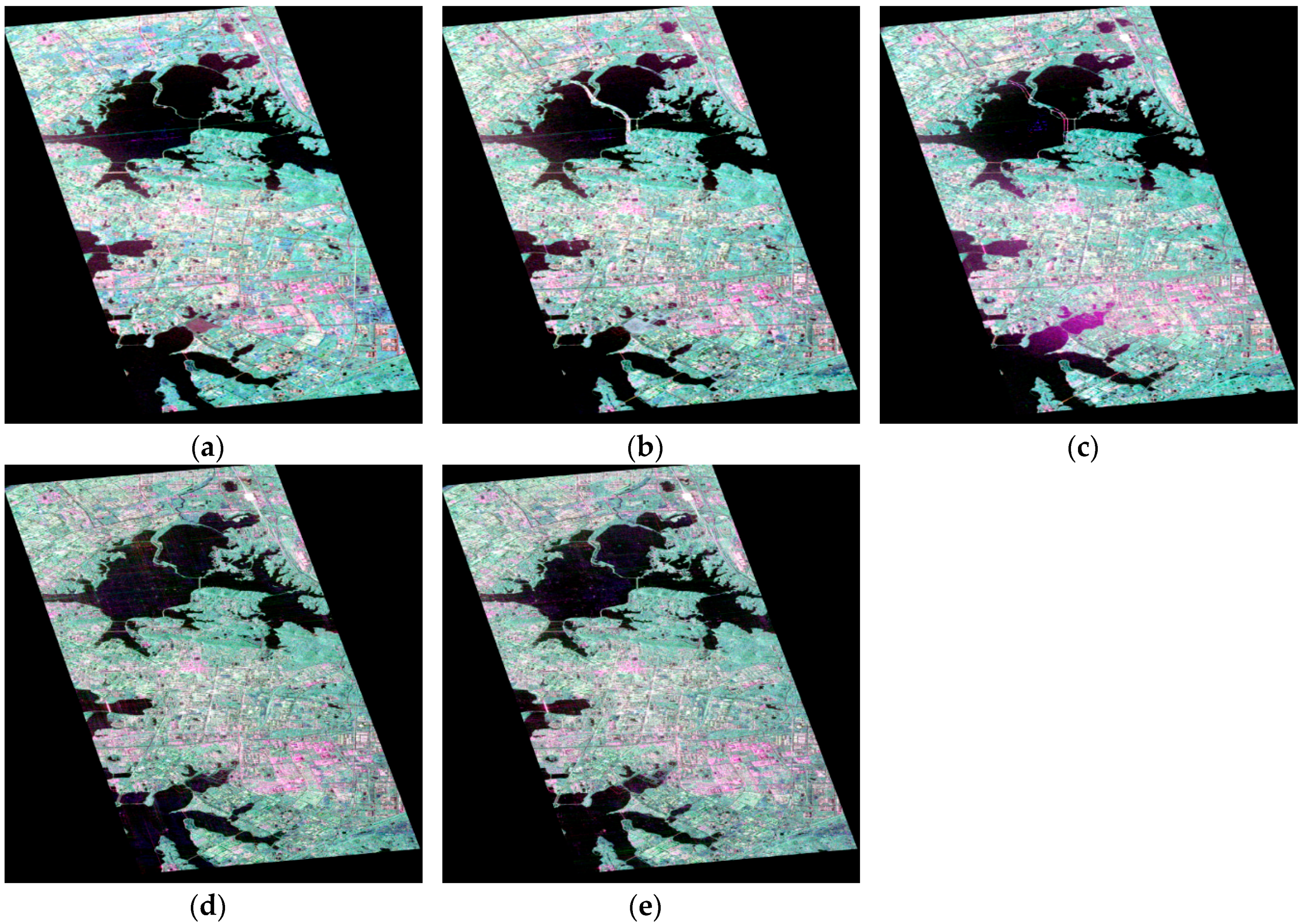
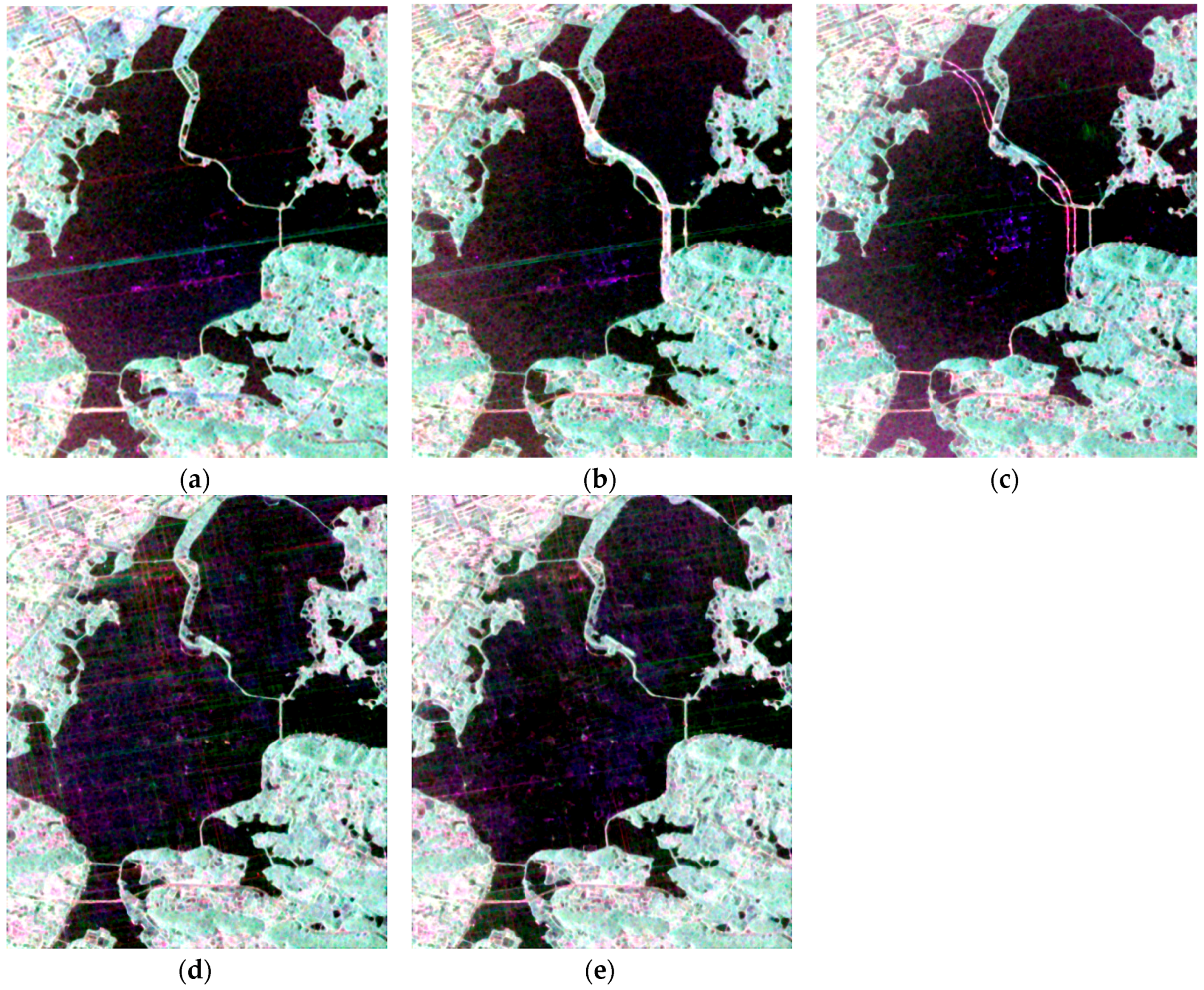
3.1. Study Area and Background
3.2. Results
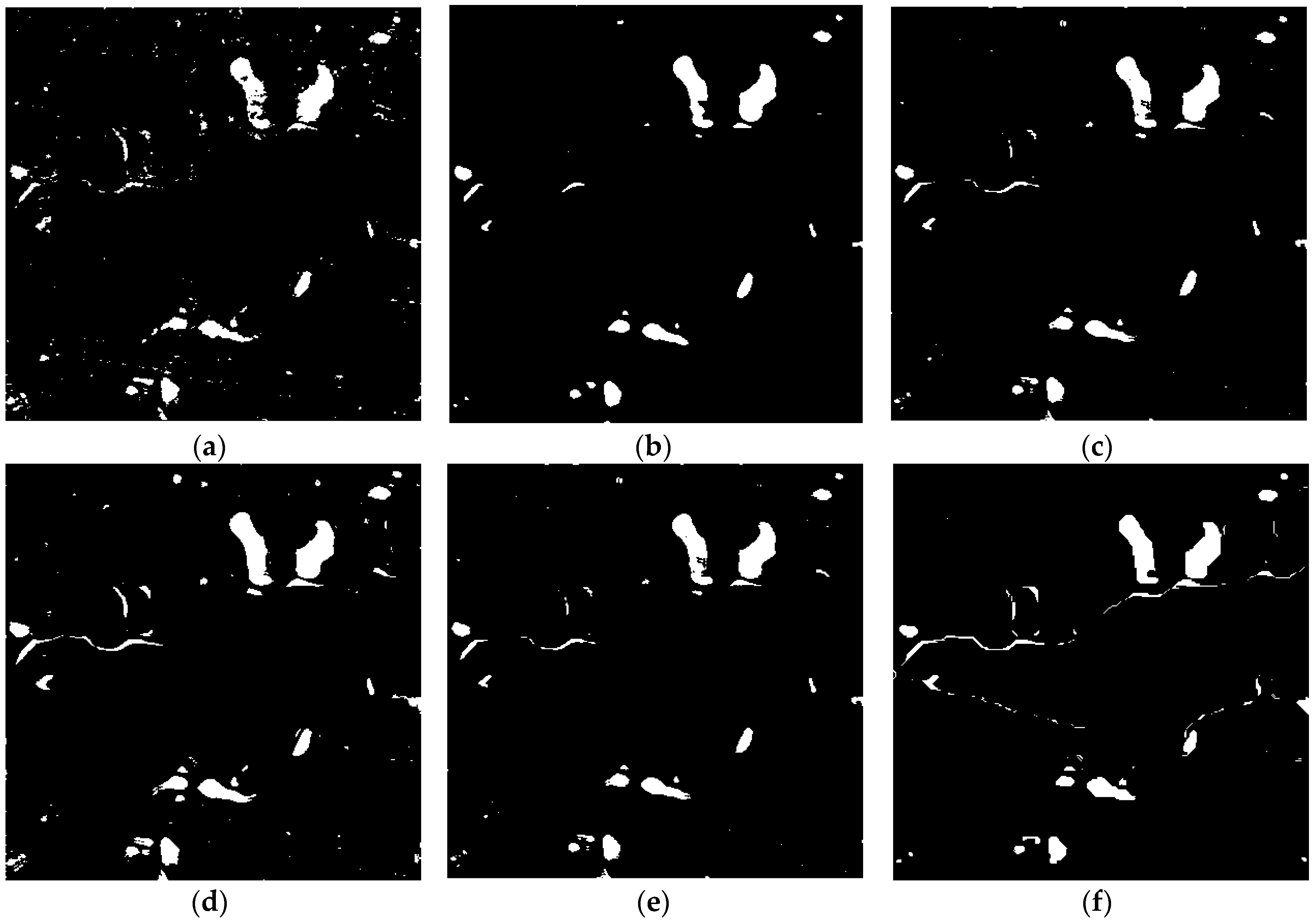
3.2.1. Omnibus Test Statistic of Time Series Change Detection over LiangZi Lake
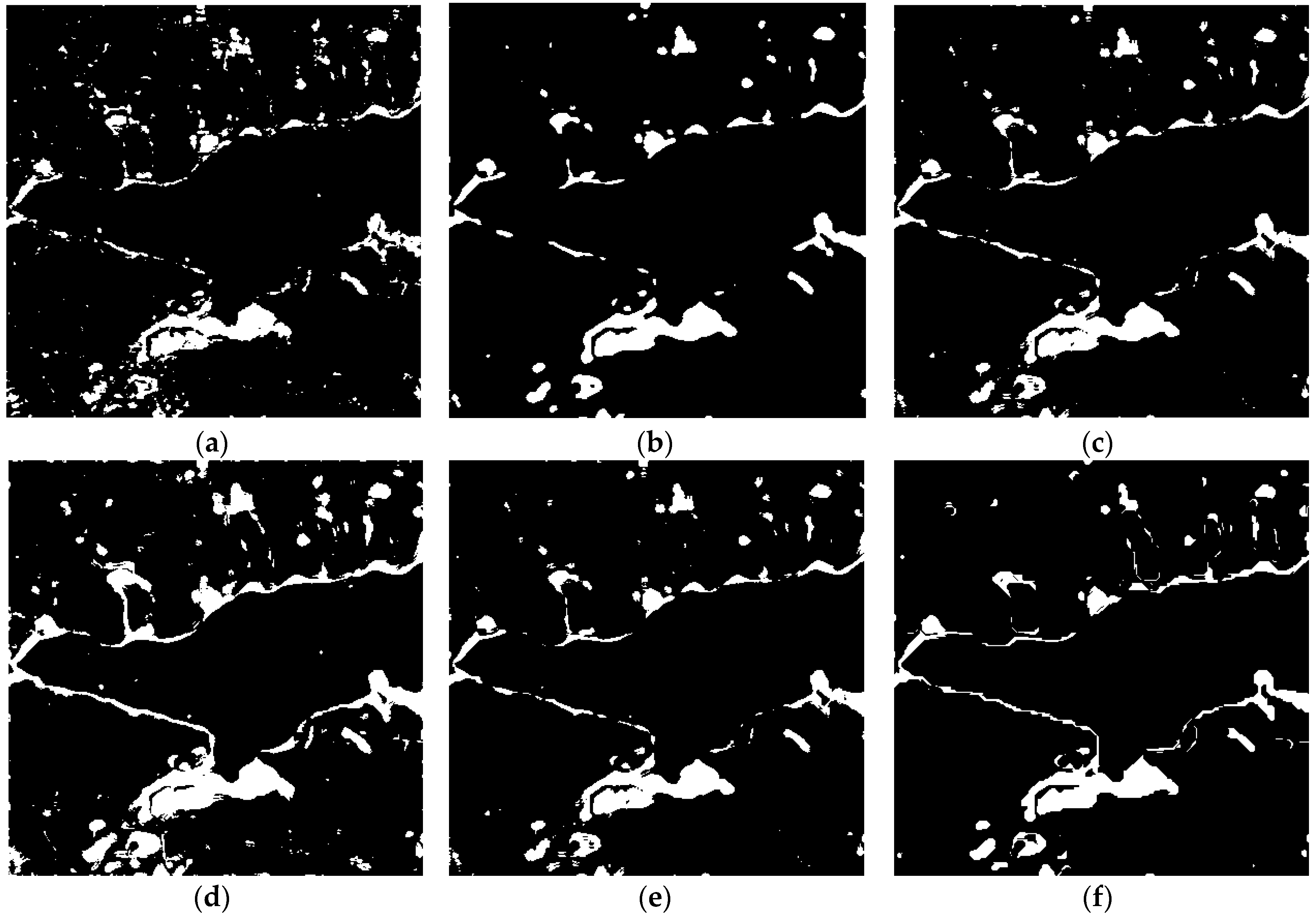
3.2.2. Rj Test Statistics of Time Series Change Detection over LiangZi Lake
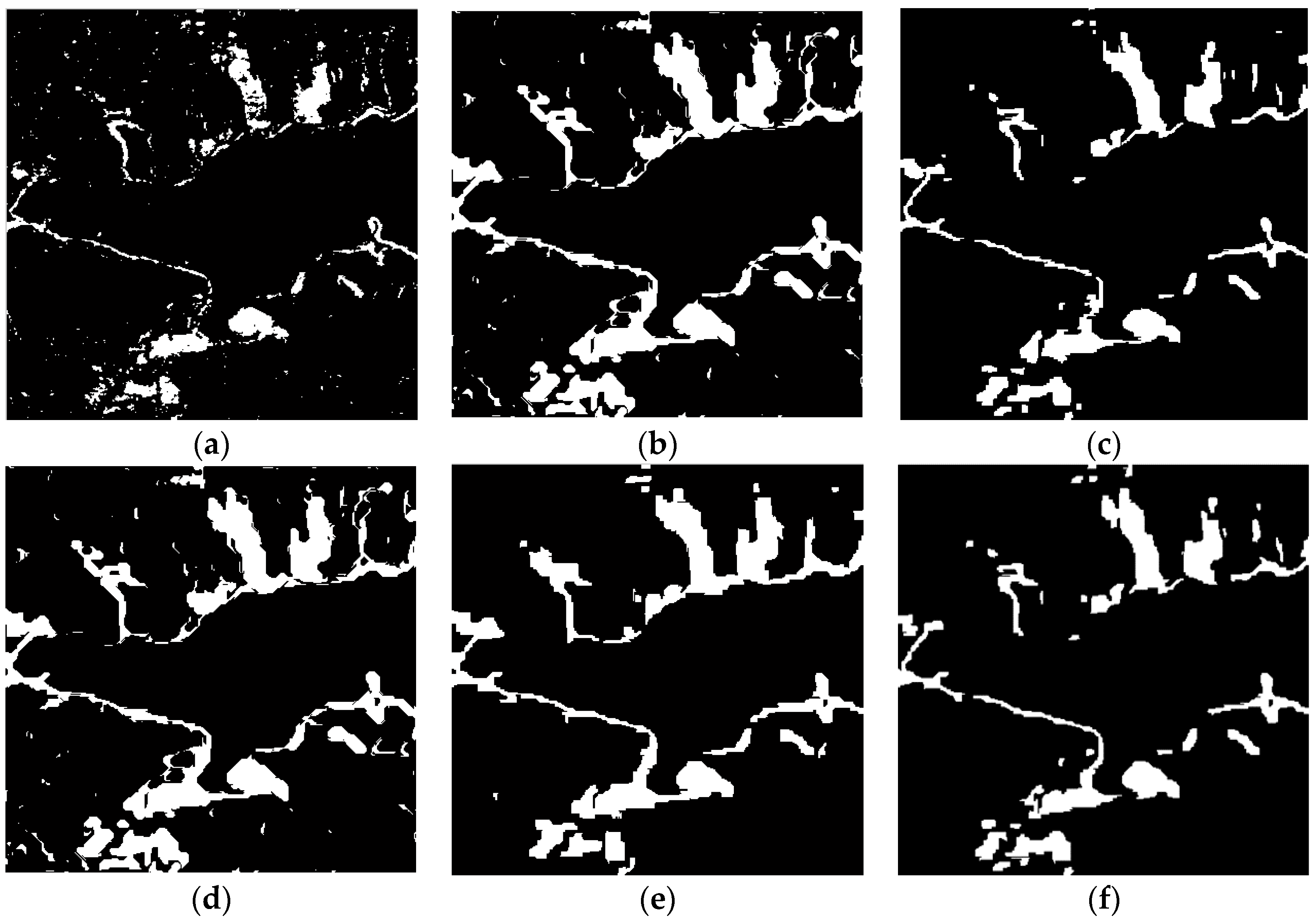
3.2.3. Time-Series Change Detection over the East Lake Tunnel
4. Discussion
- (1)
- In the aspect of generation of the difference images, many different methods, such as the log-ratio operator, the hidden Markov chain model, and Kullback-Leibler divergence, were applied in multi-temporal single-channel SAR change detection and test statistics was applied in full PolSAR images. However, these traditional methods can only generate the difference image between two different times and they cannot generate the time-series difference images. Fortunately, omnibus test statistics can generate the difference image over the entire time series and Rj test statistics can generate the difference images for the different time intervals in this paper.
- (2)
- With regard to change detection analysis, some thresholding or clustering algorithms, such as k-means algorithm, fuzzy c-means algorithm, Otsu’s thresholding algorithms, Kapur’s entropy algorithms and K&I thresholding algorithm, can better analyze the difference image based on assumption that the PDF is Gaussian distributed for the changed and unchanged classes, but they are not suitable to analyze difference image of a non-Gaussian distribution. However, GGMM is capable of better fitting the arbitrarily conditional densities of the classes and it can also select the optimal number of components for the GMM in proposed method.
- (3)
- In terms of image denoising, the object-oriented change detection algorithm can better suppress the influence of speckle noise, but some of the traditional segmentation algorithms cannot maintain the consistency between segmentation of time-series PolSAR images, the proposed method can avoid the inconsistency of segmentation by segmenting directly time-series difference images.
- (1)
- The design of our method is relatively complicated structure when compare with traditional methods of change detection.
- (2)
- The experiment areas only chosen in urban and additional scenes, such as crop growing with different seasons, the change of suspended sediment concentration from different periods, were not considered yet.
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Sun, J.; Yu, W.; Deng, Y. The SAR payload design and performance for the GF-3 mission. Sensors 2017, 17, 2419. [Google Scholar] [CrossRef] [PubMed]
- Yin, J.; Yang, J.; Zhang, Q. Assessment of GF-3 Polarimetric SAR Data for Physical Scattering Mechanism Analysis and Terrain Classification. Sensors 2017, 17, 2785. [Google Scholar] [CrossRef] [PubMed]
- Jin, T.; Qiu, X.; Hu, D.; Ding, C. Unambiguous imaging of static scenes and moving targets with the first Chinese dual-channel spaceborne SAR sensor. Sensors 2017, 17, 1709. [Google Scholar] [CrossRef] [PubMed]
- Petit, C.C.; Lambin, E.F. Integration of multi-source remote sensing data for land cover change detection. Int. J. Geogr. Inf. Science 2001, 15, 785–803. [Google Scholar] [CrossRef]
- Zhao, L.; Yang, J.; Li, P. Seasonal inundation monitoring and vegetation pattern mapping of the Erguna floodplain by means of a RADARSAT-2 fully polarimetric time series. Remote Sens. Environ. 2014, 152, 426–440. [Google Scholar] [CrossRef]
- Sun, W.; Shi, L.; Yang, J.; Li, P. Building Collapse Assessment in Urban Areas Using Texture Information From Postevent SAR Data. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2016, 9, 3792–3808. [Google Scholar] [CrossRef]
- Hayes, D.J.; Sader, S.A. Comparison of change-detection techniques for monitoring tropical forest clearing and vegetation regrowth in a time series. Photogramm. Eng. Remote Sens. 2001, 67, 1067–1075. [Google Scholar]
- Jin, S.; Sader, S.A. MODIS time-series imagery for forest disturbance detection and quantification of patch size effects. Remote Sens. Environ. 2005, 99, 462–470. [Google Scholar] [CrossRef]
- Lhermitte, S.; Verbesselt, J.; Verstraeten, W.W.; Coppin, P. A comparison of time series similarity measures for classification and change detection of ecosystem dynamics. Remote Sens. Environ. 2011, 115, 3129–3152. [Google Scholar] [CrossRef]
- Forkel, M.; Carvalhais, N.; Verbesselt, J.; Mahecha, M.D.; Neigh, C.S.; Reichstein, M. Trend change detection in NDVI time series: Effects of inter-annual variability and methodology. Remote Sens. 2013, 5, 2113–2144. [Google Scholar] [CrossRef]
- Lunetta, R.S.; Knight, J.F.; Ediriwickrema, J.; Lyon, J.G.; Worthy, L.D. Land-cover change detection using multi-temporal MODIS NDVI data. Remote Sens. Environ. 2006, 105, 142–154. [Google Scholar] [CrossRef]
- Zhao, L.; Yang, J.; Li, P.; Zhang, L.; Shi, L.; Lang, F. Damage assessment in urban areas using post-earthquake airborne PolSAR imagery. Int. J. Remote Sens. 2013, 34, 8952–8966. [Google Scholar] [CrossRef]
- Zhao, L.; Yang, J.; Li, P.; Zhang, L. Characteristics Analysis and Classification of Crop Harvest Patterns by Exploiting High-Frequency MultiPolarization SAR Data. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2014, 7, 3773–3783. [Google Scholar] [CrossRef]
- Camps-Valls, G.; Gómez-Chova, L.; Muñoz-Marí, J.; Rojo-Álvarez, J.L.; Martínez-Ramón, M. Kernel-based framework for multitemporal and multisource remote sensing data classification and change detection. IEEE Trans. Geosci. Remote Sens. 2008, 46, 1822–1835. [Google Scholar] [CrossRef] [Green Version]
- Hussain, M.; Chen, D.; Cheng, A.; Wei, H.; Stanley, D. Change detection from remotely sensed images: From pixel-based to object-based approaches. ISPRS J. Photogramm. Remote Sens. 2013, 80, 91–106. [Google Scholar] [CrossRef]
- Zhao, J.; Yang, J.; Lu, Z.; Li, P.; Liu, W. A Novel Method of Change Detection in Bi-Temporal PolSAR Data Using a Joint-Classification Classifier Based on a Similarity Measure. Remote Sens. 2017, 9, 846. [Google Scholar] [CrossRef]
- Conradsen, K.; Nielsen, A.A.; Skriver, H. Determining the points of change in time series of polarimetric SAR data. IEEE Trans. Geosci. Remote Sens. 2016, 54, 3007–3024. [Google Scholar] [CrossRef]
- Yousif, O.; Ban, Y. Object-Based Change Detection in Urban Areas Using Multitemporal High Resolution SAR Images with Unsupervised Thresholding Algorithms. In Multitemporal Remote Sensing; Springer: Berlin, Germany, 2016; Volume 45, pp. 89–105. [Google Scholar]
- Bontemps, S.; Bogaert, P.; Titeux, N.; Defourny, P. An object-based change detection method accounting for temporal dependences in time series with medium to coarse spatial resolution. Remote Sens. Environ. 2008, 112, 3181–3191. [Google Scholar] [CrossRef]
- Yang, W.; Yang, X.; Yan, T.; Song, H.; Xia, G. Region-Based Change Detection for Polarimetric SAR Images Using Wishart Mixture Models. IEEE Trans. Geosci. Remote Sens. 2016, 54, 6746–6756. [Google Scholar] [CrossRef]
- Jansing, E.D.; Albert, T.A.; Chenoweth, D.L. Two-dimensional entropic segmentation. Pattern Recognit. Lett. 1999, 20, 329–336. [Google Scholar] [CrossRef]
- Otsu, N. A threshold selection method from gray-level histograms. Automatica 1975, 11, 23–27. [Google Scholar] [CrossRef]
- Zhao, J.; Yang, J.; Lu, Z.; Li, P.; Liu, W.; Yang, L. An Unsupervised Method of Change Detection in Multi-Temporal PolSAR Data Using a Test Statistic and an Improved K&I Algorithm. Appl. Sci. 2017, 7, 1297. [Google Scholar]
- Yetgin, Z. Unsupervised change detection of satellite images using local gradual descent. IEEE Trans. Geosci. Remote Sens. 2012, 50, 1919–1929. [Google Scholar] [CrossRef]
- Rasmussen, C.E. The infinite Gaussian mixture model. Adv. Neural Inf. Proc. Syst. 2000, 10, 554–560. [Google Scholar]
- Liu, W.; Yang, J.; Zhao, J.; Yang, L. A Novel Method of Unsupervised Change Detection Using Multi-Temporal PolSAR Images. Remote Sens. 2017, 9, 1135. [Google Scholar] [CrossRef]
- Weng, H.; Zhu, C.; Lu, G. China Polyurethane Industry Status and Development Proposals of” Twelfth Five-Year Pla. Chem. Propellants Polym. Mater. 2012, 1, 002. [Google Scholar]
- Conradsen, K.; Nielsen, A.A.; Schou, J.; Skriver, H. A test statistic in the complex Wishartdistribution and its application to change detection in polarimetric SAR data. IEEE Trans. Geosci. Remote Sens. 2003, 41, 4–19. [Google Scholar] [CrossRef]
- Nock, R.; Nielsen, F. Statistical region merging. IEEE Trans. Pattern Anal. Mach. Intell. 2004, 26, 1452–1458. [Google Scholar] [CrossRef] [PubMed]
- Shi, J.; Malik, J. Normalized cuts and image segmentation. IEEE Trans. Pattern Anal. Mach. Intell. 2000, 22, 888–905. [Google Scholar]
- Comaniciu, D.; Meer, P. Mean shift: A robust approach toward feature space analysis. IEEE Trans. Pattern Anal. Mach. Intell. 2002, 24, 603–619. [Google Scholar] [CrossRef]
- Lang, F.; Yang, J.; Li, D.; Zhao, L.; Shi, L. Polarimetric SAR image segmentation using statistical region merging. IEEE Geosci. Remote Sens. Lett. 2014, 11, 509–513. [Google Scholar] [CrossRef]
- Qi, Z.; Yeh, A.G.-O.; Li, X.; Zhang, X. A three-component method for timely detection of land cover changes using polarimetric SAR images. ISPRS J. Photogramm. Remote Sens. 2015, 107, 3–21. [Google Scholar] [CrossRef]
- Ciecholewski, M. River channel segmentation in polarimetric SAR images: Watershed transform combined with average contrast maximisation. Expert Syst. Appl. 2017, 82, 196–215. [Google Scholar] [CrossRef]
- Jin, R.; Yin, J.; Zhou, W.; Yang, J. Level Set Segmentation Algorithm for High-Resolution Polarimetric SAR Images Based on a Heterogeneous Clutter Model. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2017, 10, 4565–4579. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Methods | Relative Algorithms | Advantages | Disadvantages |
|---|---|---|---|
| Algebraic Operation | Image ratioing; Log-ratio operator; Regression analysis | Simple and easy to interpret change detection results. | Difficult to select the optimal threshold and easy to lose change information. |
| Transformation | Vegetation index differencing(VID); Change vector analysis (CVA); Principal component analysis (PCA); Tasselled cap transformation (KT) | Can reduce the data redundancy and also emphasize the different information of the derived components. | Strictly require the remotely sensed data acquired from the same phenological period and difficult to select the optimal threshold. |
| Object-based change detection | Direct object-basedcomparison | Allow straight forward comparison of objects and reduce the influence of speckle noise. | Some of the traditional segmentation algorithms cannot maintain the consistency of PolSAR images and might cause higher false alarm rates. |
| Other methods | Hidden Markov chain model (HMM); Kullback-Leibler divergence and so on. | Simple and can be applied in multi-temporal single-channel SAR change detection. | Cannot be applied in multi-temporal PolSAR change detection and the selection of thresholding based on a Gaussian distribution. |
| Acquisition Date | Sensors | Mode | Processing Level | Polarization | ProductId |
|---|---|---|---|---|---|
| 7 December 2011 | Radarsat-2 | FQ21 | Single Look Complex | HH + HV + VH + VV | RD2011000503-0 |
| 25 June 2015 | Radarsat-2 | FQ21 | Single Look Complex | HH + HV + VH + VV | PDS_04516040 |
| 6 July 2016 | Radarsat-2 | FQ21 | Single Look Complex | HH + HV + VH + VV | PDS_05215280 |
| 30 April 2017 | Gaofen-3 | QPSI | Single Look Complex | HH + HV + VH + VV | 2335427 |
| 29 May 2017 | Gaofen-3 | QPSI | Single Look Complex | HH + HV + VH + VV | 2390686 |
| Method | OA | FA | OF | Kappa |
|---|---|---|---|---|
| OT_GGMM_pix | 89.91% | 1.43% | 8.65% | 0.54 |
| OT_GGMM_obj | 91.03% | 1.13% | 7.83% | 0.59 |
| OT_GSRM_KI | 92.35% | 1.73% | 5.91% | 0.70 |
| OT_GSRM_TDES | 92.29% | 2.22% | 5.70% | 0.69 |
| OT_GSRM_Kmeans | 90.87% | 0.32% | 8.80% | 0.59 |
| OT_GSRM_GGMM | 93.85% | 0.27% | 6.87% | 0.71 |
| Method | OA | FA | OF | Kappa |
|---|---|---|---|---|
| OT_GGMM_pix | 94.64% | 2.43% | 2.93% | 0.66 |
| OT_GGMM_obj | 95.55% | 2.04% | 2.41% | 0.69 |
| OT_GSRM_KI | 95.14% | 2.23% | 2.63% | 0.68 |
| OT_GSRM_TDES | 95.16% | 2.13% | 2.71% | 0.68 |
| OT_GSRM_Kmeans | 95.20% | 2.31% | 2.49% | 0.68 |
| OT_GSRM_GGMM | 96.98% | 1.29% | 1.73% | 0.78 |
| Method | OA | FA | OF | Kappa |
|---|---|---|---|---|
| OT_GGMM_pix | 92.46% | 1.23% | 6.29% | 0.58 |
| OT_GGMM_obj | 94.03% | 0.57% | 5.38% | 0.65 |
| OT_GSRM_KI | 93.16% | 0.82% | 6.01% | 0.61 |
| OT_GSRM_TDES | 93.29% | 0.75% | 5.95% | 0.62 |
| OT_GSRM_Kmeans | 93.28% | 0.75% | 5.96% | 0.62 |
| OT_GSRM_GGMM | 95.95% | 0.60% | 3.44% | 0.71 |
| Method | OA | FA | OF | Kappa |
|---|---|---|---|---|
| OT_GGMM_pix | 95.12% | 2.07% | 2.97% | 0.70 |
| OT_GGMM_obj | 95.41% | 1.90% | 2.74% | 0.73 |
| OT_GSRM_KI | 95.30% | 3.51% | 1.17% | 0.74 |
| OT_GSRM_TDES | 95.49% | 2.12% | 2.38% | 0.74 |
| OT_GSRM_Kmeans | 94.29% | 4.58% | 1.12% | 0.71 |
| OT_GSRM_GGMM | 96.22% | 1.56% | 2.20% | 0.76 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, W.; Yang, J.; Zhao, J.; Shi, H.; Yang, L. An Unsupervised Change Detection Method Using Time-Series of PolSAR Images from Radarsat-2 and GaoFen-3. Sensors 2018, 18, 559. https://doi.org/10.3390/s18020559
Liu W, Yang J, Zhao J, Shi H, Yang L. An Unsupervised Change Detection Method Using Time-Series of PolSAR Images from Radarsat-2 and GaoFen-3. Sensors. 2018; 18(2):559. https://doi.org/10.3390/s18020559
Chicago/Turabian StyleLiu, Wensong, Jie Yang, Jinqi Zhao, Hongtao Shi, and Le Yang. 2018. "An Unsupervised Change Detection Method Using Time-Series of PolSAR Images from Radarsat-2 and GaoFen-3" Sensors 18, no. 2: 559. https://doi.org/10.3390/s18020559
APA StyleLiu, W., Yang, J., Zhao, J., Shi, H., & Yang, L. (2018). An Unsupervised Change Detection Method Using Time-Series of PolSAR Images from Radarsat-2 and GaoFen-3. Sensors, 18(2), 559. https://doi.org/10.3390/s18020559