Polynomial Phase Estimation Based on Adaptive Short-Time Fourier Transform

Abstract
:1. Introduction
2. QML Estimator
3. Proposed Estimator
3.1. Instantaneous Frequency Estimation by S-Transform
3.2. Instantaneous Frequency Gradient Estimation
3.3. Adaptive Window Width Estimation
3.4. Coarse Estimator
3.5. Refinement Strategy
| Algorithm 1 |
| Input: The PPS signal is . |
|
| Output: The estimation coefficients . |
4. Numerical Simulations
4.1. Simulation Time
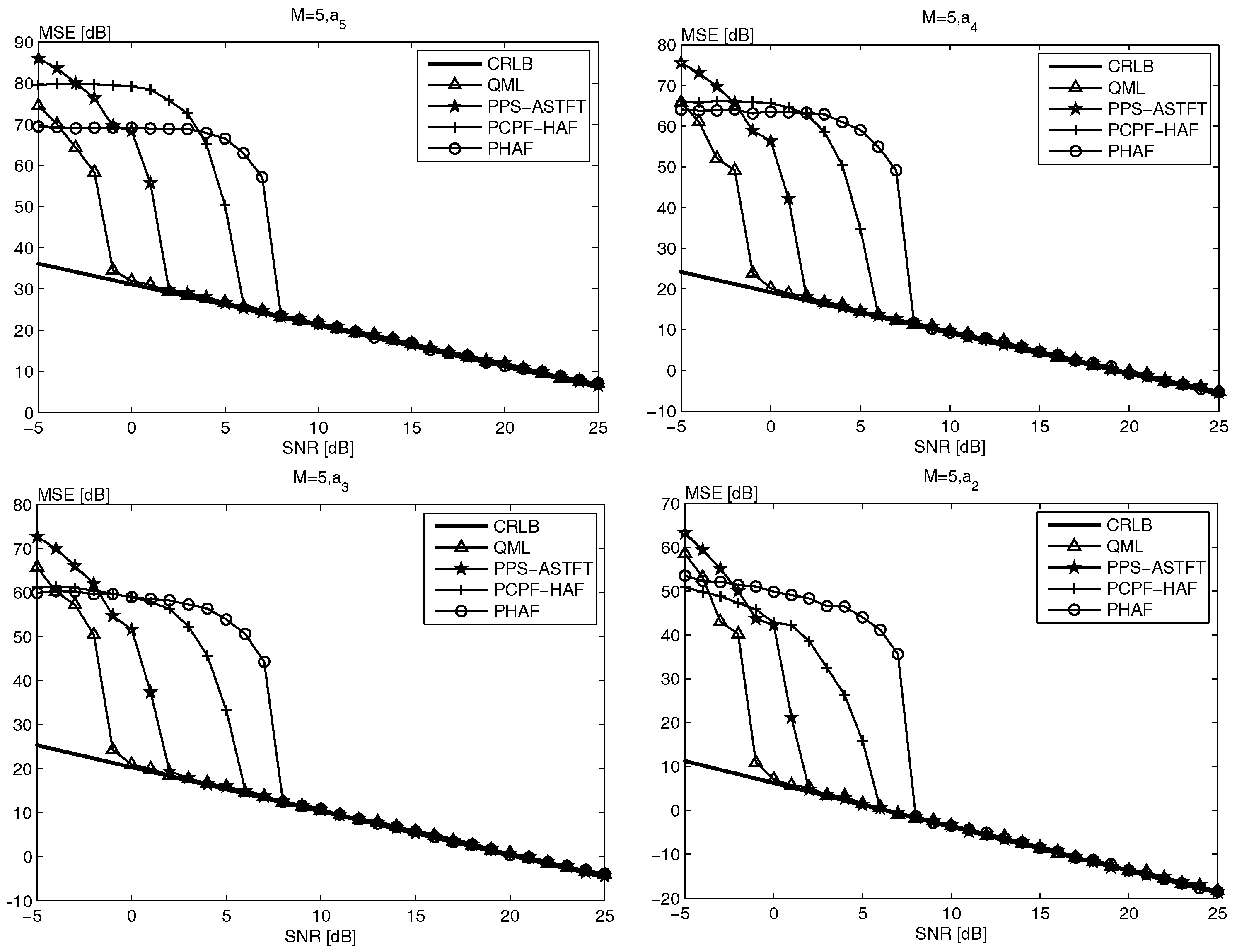
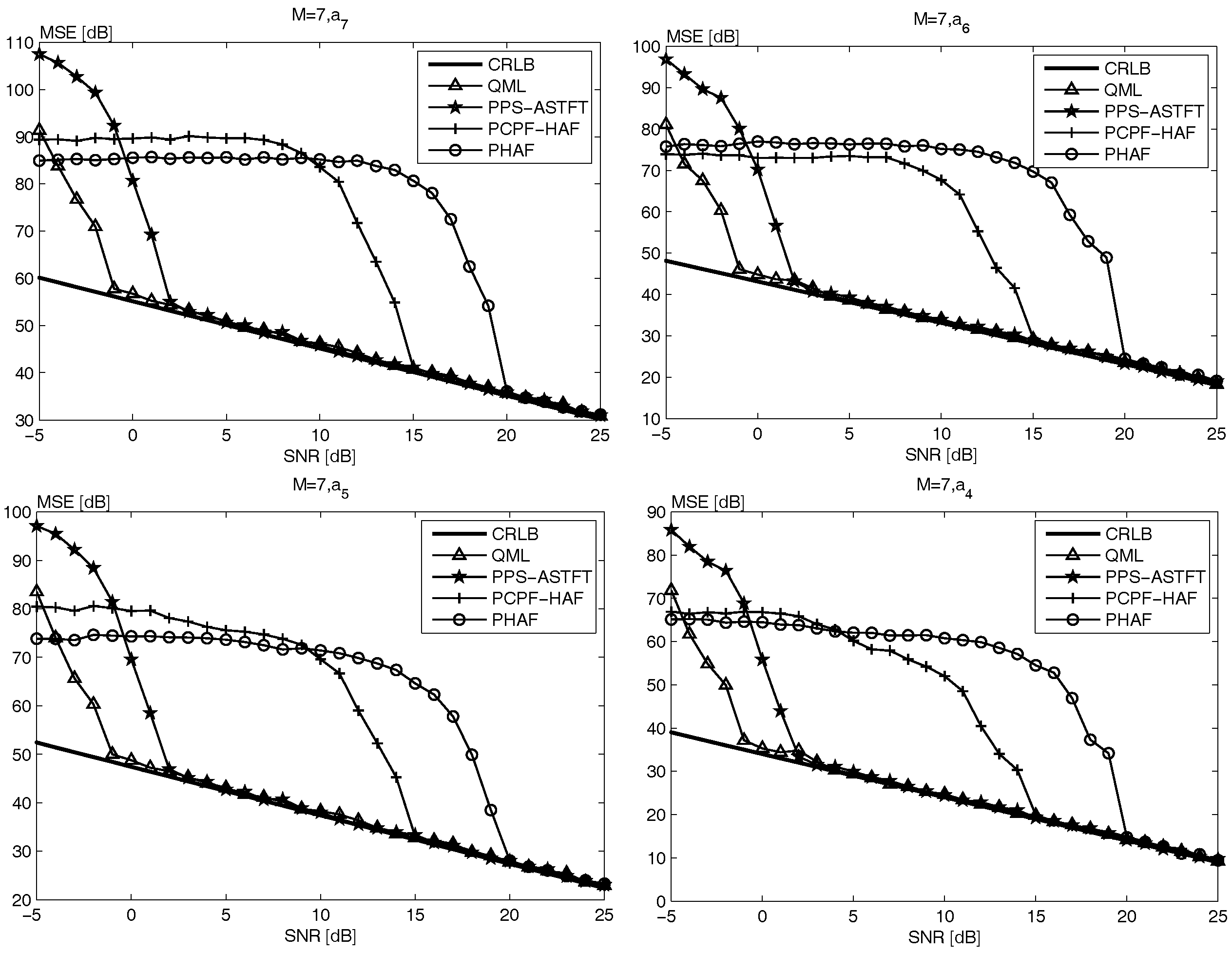
4.2. Performance Analysis
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Gao, B.; Woo, W.L.; Dlay, S.S. Unsupervised single-channel separation of nonstationary signals using gammatone filterbank and itakura–saito nonnegative matrix two-dimensional factorizations. IEEE Trans. Circuits Syst. I Regul. Pap. 2013, 60, 662–675. [Google Scholar] [CrossRef]
- Gao, B.; Woo, W.L. Wearable audio monitoring: Content-based processing methodology and implementation. IEEE Trans. Hum.-Mach. Syst. 2014, 44, 222–233. [Google Scholar] [CrossRef]
- Gao, B.; Woo, W.L.; He, Y.; Tian, G.Y. Unsupervised sparse pattern diagnostic of defects with inductive thermography imaging system. IEEE Trans. Ind. Inform. 2016, 12, 371–383. [Google Scholar] [CrossRef]
- Gao, B.; He, Y.; Woo, W.L.; Tian, G.Y.; Liu, J.; Hu, Y. Multidimensional tensor-based inductive thermography with multiple physical fields for offshore wind turbine gear inspection. IEEE Trans. Ind. Electron. 2016, 63, 6305–6315. [Google Scholar] [CrossRef]
- Suga, N.; Simmons, J.A.; Jen, P.H. Peripheral specialization for fine analysis of doppler-shifted echoes in the auditory system of the “cf-fm” bat pteronotus parnellii. J. Exp. Biol. 1975, 63, 161–192. [Google Scholar] [PubMed]
- Hlawatsch, F.; Boudreaux-Bartels, G.F. Linear and quadratic time-frequency signal representations. IEEE Signal Process. Mag. 1992, 9, 21–67. [Google Scholar] [CrossRef]
- Boashash, B. Time-Frequency Signal Analysis and Processing: A Comprehensive Reference; Elsevier: Amsterdam, The Netherlands, 2003; pp. 1–743. [Google Scholar]
- Kitchen, J. A method for estimating the coefficients of a polynomial phase signal. Signal Process. 1994, 37, 463–470. [Google Scholar] [CrossRef]
- Amar, A.; Leshem, A.; Veen, A.J.V.D. A low complexity blind estimator of narrowband polynomial phase signals. IEEE Trans. Signal Process. 2010, 58, 4674–4683. [Google Scholar] [CrossRef]
- Mckilliam, R.G.; Quinn, B.G.; Clarkson, I.V.L.; Moran, B.; Vellambi, B.N. Polynomial phase estimation by least squares phase unwrapping. IEEE Trans. Signal Process. 2014, 62, 1962–1975. [Google Scholar] [CrossRef]
- Peleg, S.; Friedlander, B. The discrete polynomial-phase transform. IEEE Trans. Signal Process. 1995, 43, 1901–1914. [Google Scholar] [CrossRef]
- Porat, B.; Friedlander, B. Asymptotic statistical analysis of the high-order ambiguity function for parameter estimation of polynomial-phase signals. IEEE Trans. Inf. Theory 1996, 42, 995–1001. [Google Scholar] [CrossRef]
- Barbarossa, S.; Scaglione, A.; Giannakis, G.B. Product high-order ambiguity function for multicomponent polynomial-phase signal modeling. IEEE Trans. Signal Process. 1998, 46, 691–708. [Google Scholar] [CrossRef]
- Barbarossa, S.; Petrone, V. Analysis of polynomial-phase signals by the integrated generalized ambiguity function. IEEE Trans. Signal Process. 1997, 45, 316–327. [Google Scholar] [CrossRef]
- O’Shea, P. A new technique for instantaneous frequency rate estimation. IEEE Signal Process. Lett. 2002, 9, 251–252. [Google Scholar] [CrossRef] [Green Version]
- O’Shea, P. A fast algorithm for estimating the parameters of a quadratic fm signal. IEEE Trans. Signal Process. 2004, 52, 385–393. [Google Scholar] [CrossRef]
- Djurovic, I.; Simeunovic, M.; Djukanovic, S.; Wang, P. A hybrid cpf-haf estimation of polynomial-phase signals: Detailed statistical analysis. IEEE Trans. Signal Process. 2012, 60, 5010–5023. [Google Scholar] [CrossRef]
- Djurović, I.; Stanković, L. Quasi-maximum-likelihood estimator of polynomial phase signals. IET Signal Process. 2013, 8, 347–359. [Google Scholar] [CrossRef]
- Djurovic, I.; Simeunovic, M. Resolving aliasing effect in the qml estimation of ppss. IEEE Trans. Aerosp. Electron. Syst. 2016, 52, 1494–1499. [Google Scholar] [CrossRef]
- Djurović, I.; Simeunović, M. Review of the quasi maximum likelihood estimator for polynomial phase signals. Digit. Signal Process. 2018, 72, 59–74. [Google Scholar] [CrossRef]
- Portnoff, M. Time-frequency representation of digital signals and systems based on short-time fourier analysis. IEEE Trans. Acoust. Speech Signal Process. 1980, 28, 55–69. [Google Scholar] [CrossRef]
- Djurović, I.; Stanković, L. Stft-based estimator of polynomial phase signals. Signal Process. 2012, 92, 2769–2774. [Google Scholar] [CrossRef]
- Peleg, S.; Porat, B. The cramer-rao lower bound for signals with constant amplitude and polynomial phase. IEEE Trans. Signal Process. 1991, 39, 749–752. [Google Scholar] [CrossRef]
- Ristic, B.; Boashash, B. Comments on “the cramer-rao lower bounds for signals with constant amplitude and polynomial phase. IEEE Trans. Signal Process. 1998, 46, 1708–1709. [Google Scholar] [CrossRef]
- Shi, G.; Nehorai, A. Maximum likelihood estimation of point scatterers for computational time-reversal imaging. Commun. Inf. Syst. 2005, 5, 227–256. [Google Scholar]
- Devaney, A.J.; Marengo, E.A.; Gruber, F.K. Time-reversal-based imaging and inverse scattering of multiply scattering point targets. J. Acoust. Soc. Am. 2005, 118, 3129–3138. [Google Scholar] [CrossRef]
- Devaney, A.J. Time reversal imaging of obscured targets from multistatic data. IEEE Trans. Antennas Propag. 2005, 53, 1600–1610. [Google Scholar] [CrossRef]
- Ciuonzo, D.; Rossi, P.S. Noncolocated time-reversal music: High-snr distribution of null spectrum. IEEE Signal Process. Lett. 2017, 24, 397–401. [Google Scholar] [CrossRef]
- Ciuonzo, D. On time-reversal imaging by statistical testing. IEEE Signal Process. Lett. 2017, 24, 1024–1028. [Google Scholar] [CrossRef]
- Wan, L.; Han, G.; Jiang, J.; Zhu, C.; Shu, L. A doa estimation approach for transmission performance guarantee in d2d communication. Mob. Netw. Appl. 2017, 22, 998–1009. [Google Scholar] [CrossRef]
- Wan, L.; Han, G.; Zhang, D.; Li, A.; Feng, N. Distributed doa estimation for arbitrary topology structure of mobile wireless sensor network using cognitive radio. Wirel. Pers. Commun. 2016, 93, 1–15. [Google Scholar] [CrossRef]
- Cohen, L. Time-frequency distributions-a review. Proc. IEEE 1989, 77, 941–981. [Google Scholar] [CrossRef]
- Jolliffe, I.T. Principal component analysis and factor analysis. In Principal Component Analysis; Springer: New York, NY, USA, 1986; pp. 115–128. [Google Scholar]
- Dunteman, G.H. Principal Components Analysis; Sage: Newcastle Upon Tyne, UK, 1989. [Google Scholar]
- Groth, D.; Hartmann, S.; Klie, S.; Selbig, J. Principal components analysis. Comput. Toxicol. 2013, 2, 527–547. [Google Scholar]
- O’Shea, P. On refining polynomial phase signal parameter estimates. IEEE Trans. Aerosp. Electron. Syst. 2010, 46, 978–987. [Google Scholar] [CrossRef]
- Zhong, J.; Huang, Y. Time-frequency representation based on an adaptive short-time fourier transform. IEEE Trans. Signal Process. 2010, 58, 5118–5128. [Google Scholar] [CrossRef]
- Pei, S.C.; Huang, S.G. Stft with adaptive window width based on the chirp rate. IEEE Trans. Signal Process. 2012, 60, 4065–4080. [Google Scholar] [CrossRef]
- Mallat, S. A Wavelet Tour of Signal Processing; Academic Press: Cambridge, MA, USA, 1999. [Google Scholar]
- Leon, C. Time-Frequency Analysis: Theory and Applications; Pnentice Hall: Upper Saddle River, NJ, USA, 1995. [Google Scholar]
- November, L.J.; Simon, G.W. Precise proper-motion measurement of solar granulation. Astrophys. J. 1988, 333, 427–442. [Google Scholar] [CrossRef]
- Lee, I.W.C.; Dash, P.K. S-transform-based intelligent system for classification of power quality disturbance signals. IEEE Trans. Ind. Electron. 2003, 50, 800–805. [Google Scholar] [CrossRef]
- Djurović, I. On parameters of the qml pps estimator. Signal Process. 2015, 116, 1–6. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
| M | ||||||||
|---|---|---|---|---|---|---|---|---|
| 246.096 | 0.0302 | –737.4794 | 39.995 | 722.1379 | 20 | |||
| 0.3007 | 165.2 | –0.0867 | –626.8528 | 5.006 | 678.5557 | 20 | ||
| –26.7439 | –0.0036 | 122.0581 | 0.001 | –248.0279 | 50 | 550.7961 | 20 |
| Estimation Algorithm | M = 7 | M = 6 | M = 5 |
|---|---|---|---|
| PHAF | 0.0516 | 0.0423 | 0.0362 |
| PHAF-CPF | 0.2032 | 0.1851 | 0.1702 |
| QML | 1.5183 | 1.5101 | 1.4504 |
| PPS-ASTFT | 0.2121 | 0.1991 | 0.1921 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jing, F.; Zhang, C.; Si, W.; Wang, Y.; Jiao, S. Polynomial Phase Estimation Based on Adaptive Short-Time Fourier Transform. Sensors 2018, 18, 568. https://doi.org/10.3390/s18020568
Jing F, Zhang C, Si W, Wang Y, Jiao S. Polynomial Phase Estimation Based on Adaptive Short-Time Fourier Transform. Sensors. 2018; 18(2):568. https://doi.org/10.3390/s18020568
Chicago/Turabian StyleJing, Fulong, Chunjie Zhang, Weijian Si, Yu Wang, and Shuhong Jiao. 2018. "Polynomial Phase Estimation Based on Adaptive Short-Time Fourier Transform" Sensors 18, no. 2: 568. https://doi.org/10.3390/s18020568
APA StyleJing, F., Zhang, C., Si, W., Wang, Y., & Jiao, S. (2018). Polynomial Phase Estimation Based on Adaptive Short-Time Fourier Transform. Sensors, 18(2), 568. https://doi.org/10.3390/s18020568