Object-Oriented Hierarchy Radiation Consistency for Different Temporal and Different Sensor Images





Abstract
:1. Introduction
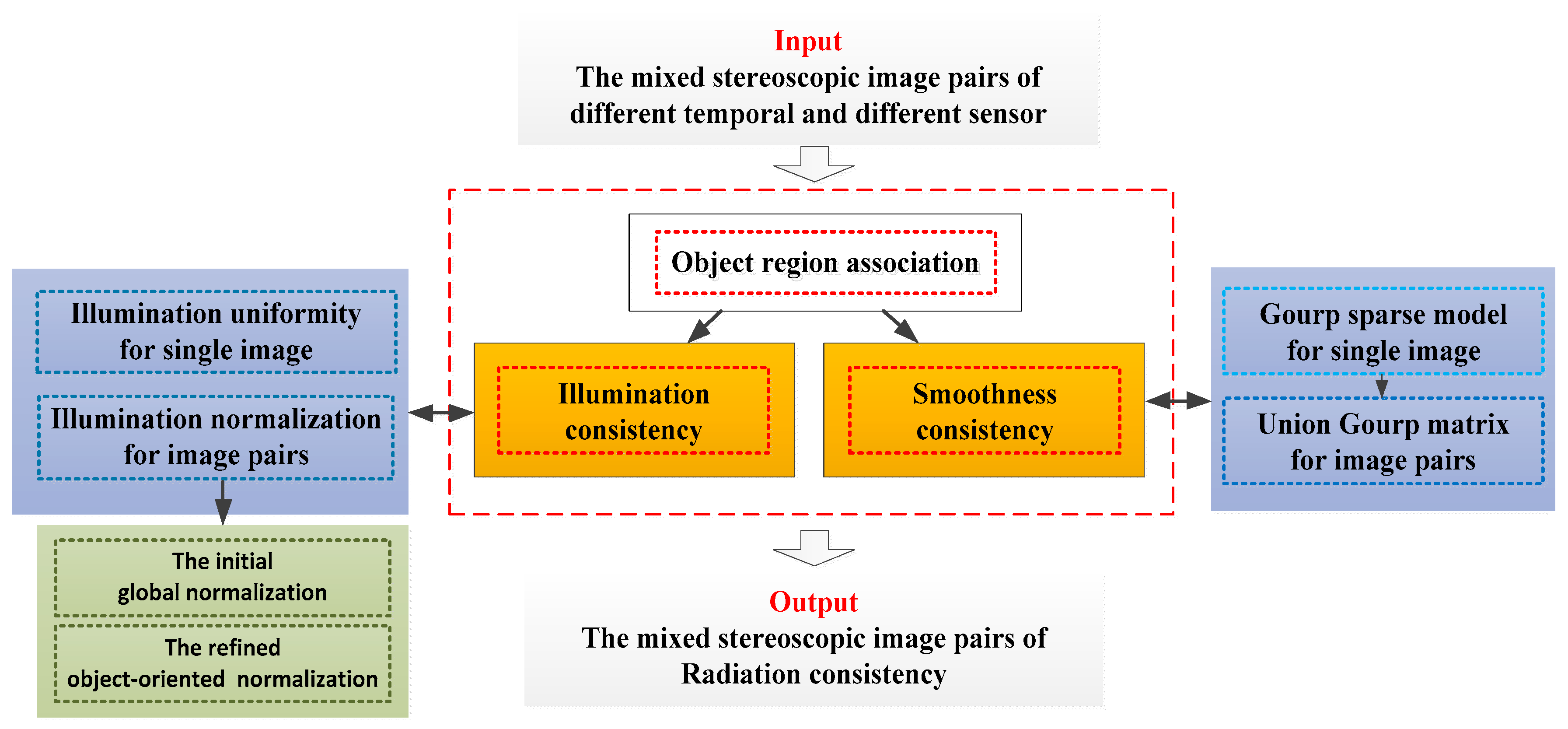
2. Proposed Methods
3. Object Region Association
4. Illumination Consistency for Different Temporal Images
4.1. Illumination Uniformity for Single Image
4.2. Illumination Normalization for Stereoscopic Image Pairs
4.2.1. The Initial Global Illumination Normalization
4.2.2. The Refined Object-Oriented Illumination Normalization
5. Smoothness Consistency for Different Sensor Images
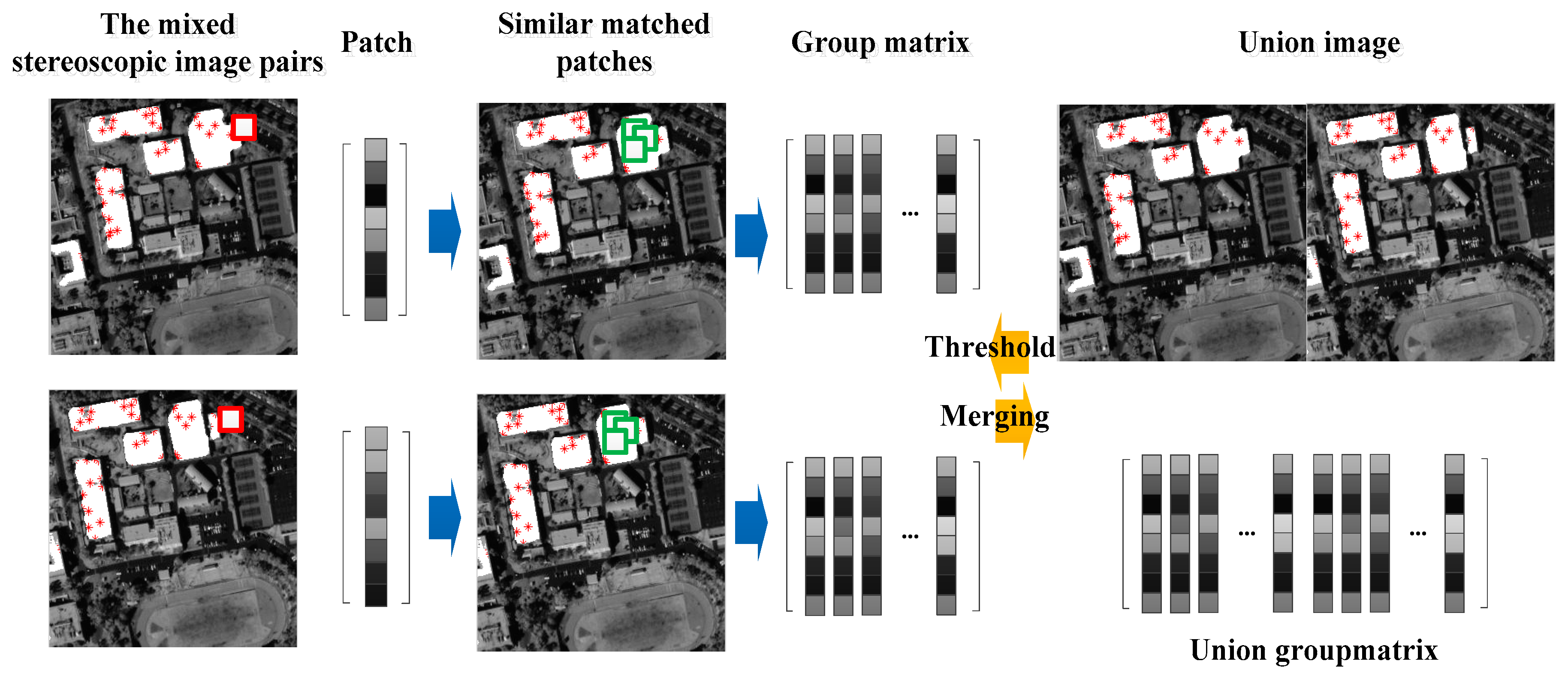
5.1. Group Sparse Model
5.2. Union Group Sparse Method for the Smoothness Consistency of Different Sensor Images
6. Experimental Results
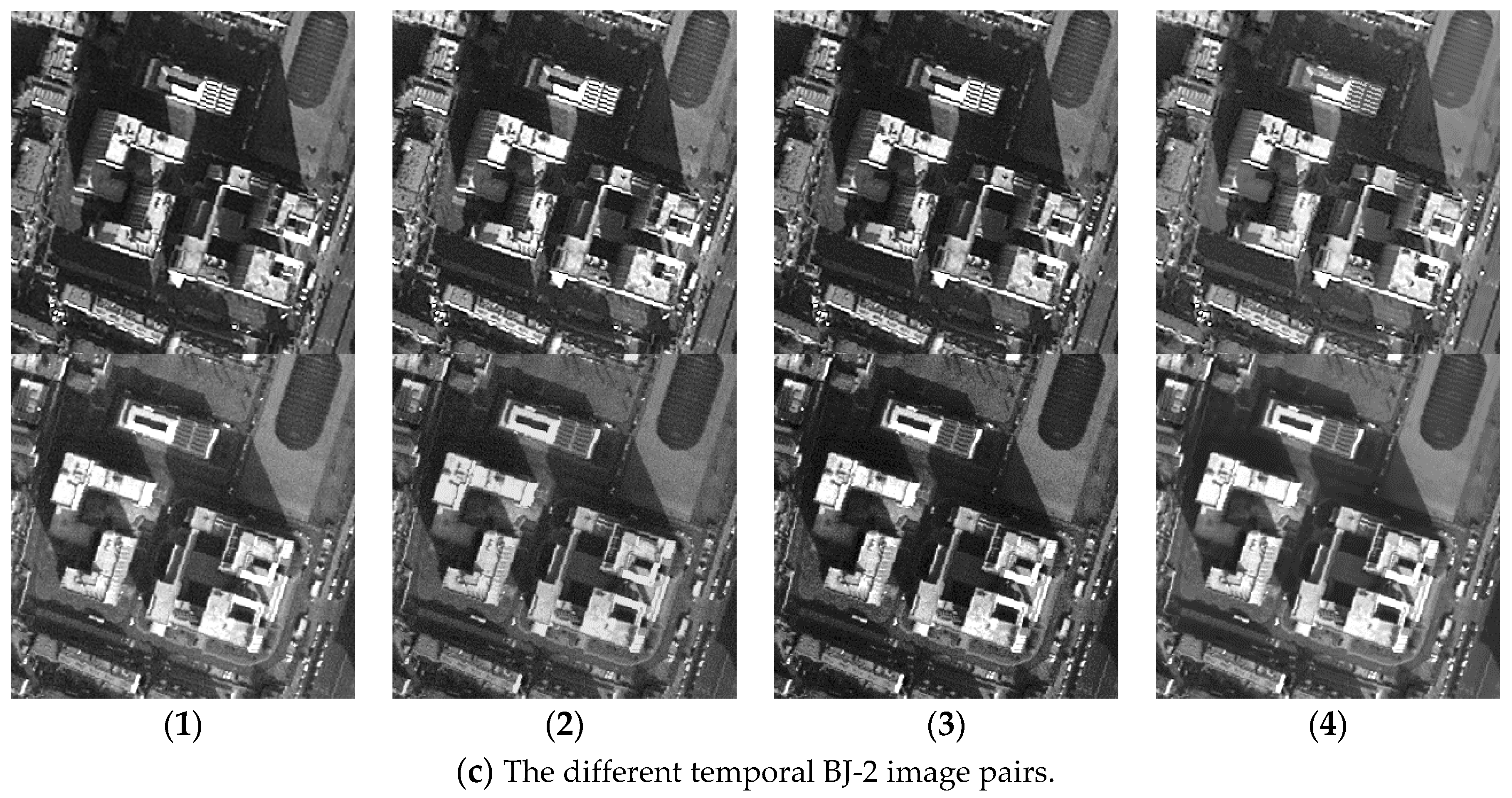
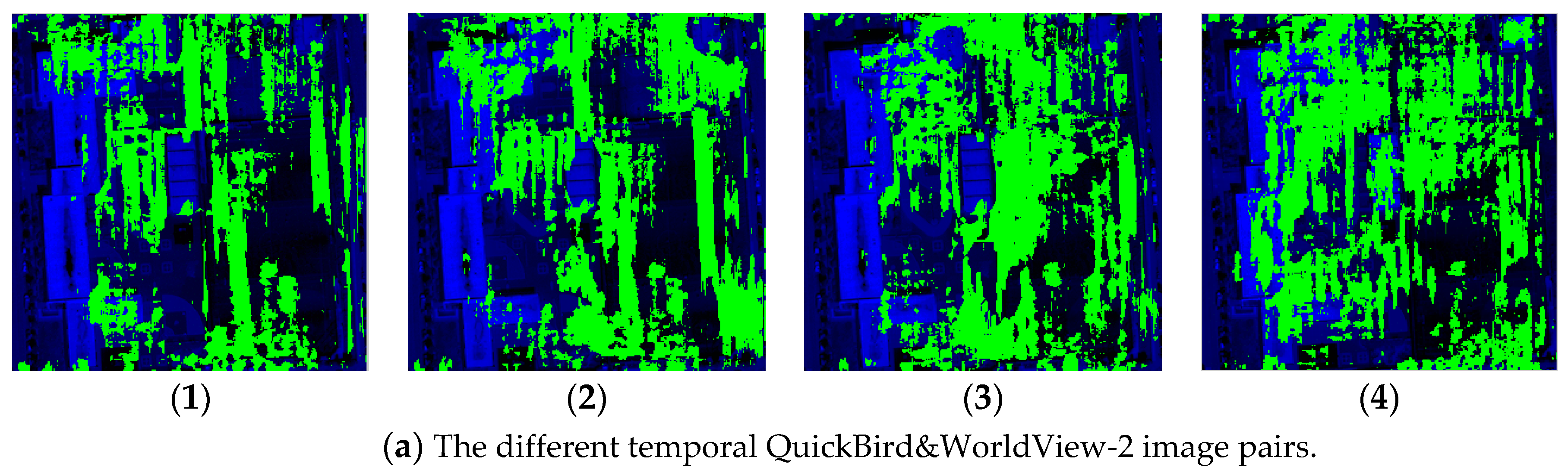
6.1. Dataset Description
6.2. Comparative Experiment of Radiation Consistency for Multiple Mixed Stereoscopic Image Pairs
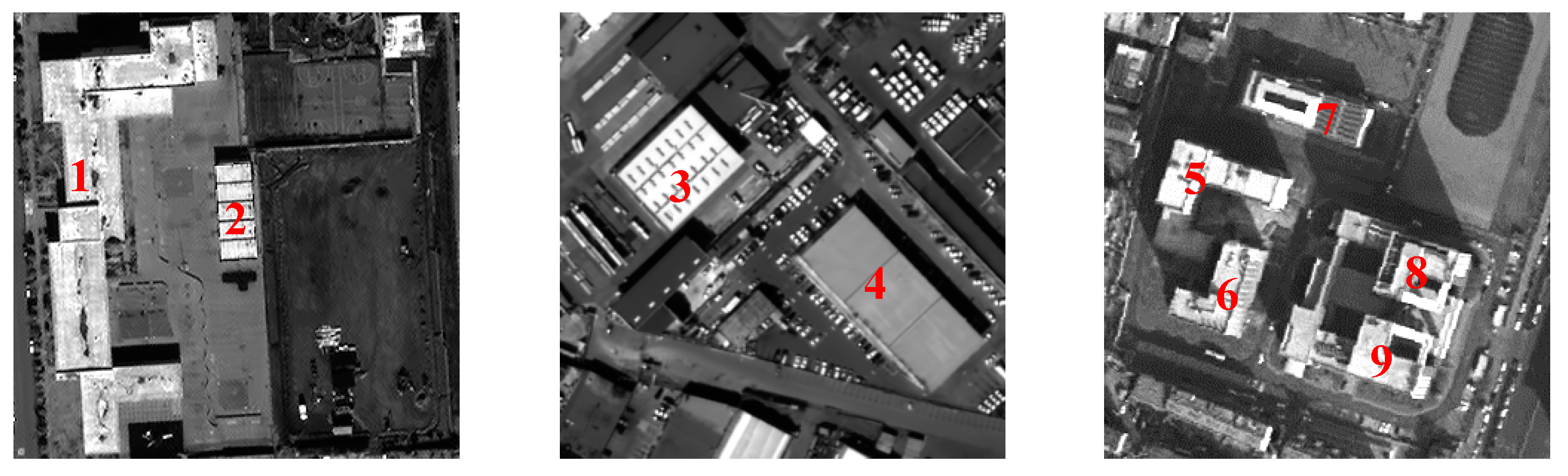
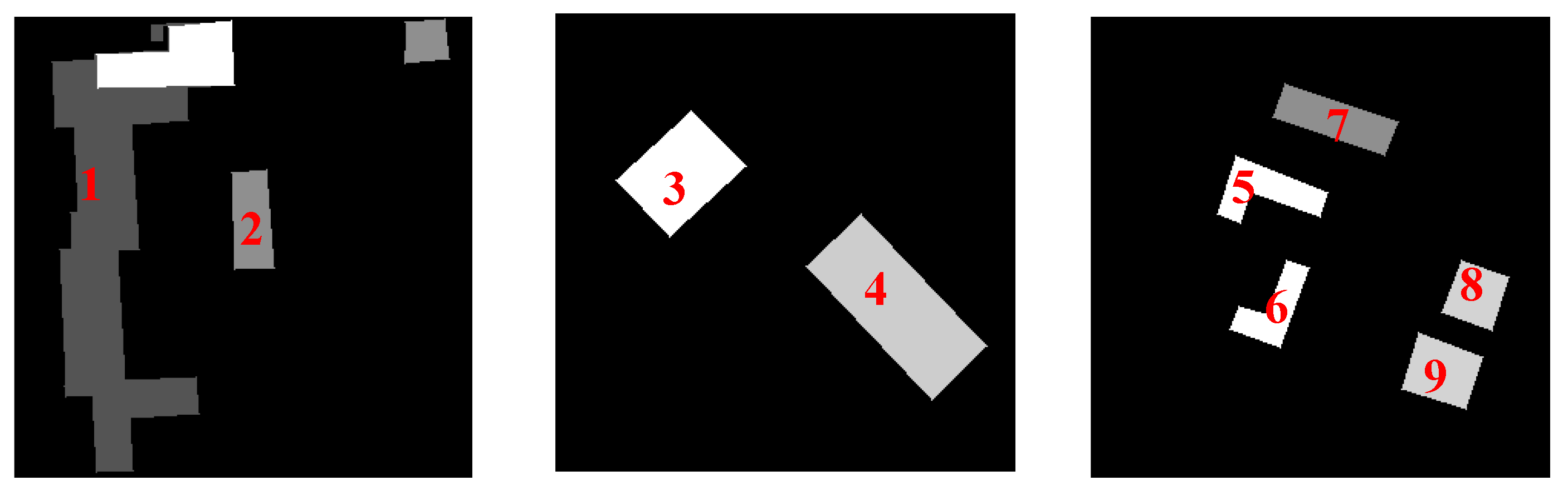
6.3. The Analysis of Radiation Consistency Based on Objects
6.4. Comparative Experiments of Dense Matching for the Mixed Stereoscopic Image Pairs
7. Conclusions
- A novel hierarchy radiation consistency method is proposed based on the comprehensive analysis of different temporal and different sensor data. For the different temporal stereoscopic image pairs, the illumination uniformity for single image and relative illumination normalization for two images are both considered to obtain the illumination consistency images. For the different sensor stereoscopic image pairs, different smoothness levels are solved by the proposed union group sparse method. Our hierarchy method simultaneously controls the illumination consistency and the smoothness consistency, which can be very helpful for dense matching.
- The object-oriented method idea is proposed. The object extraction method and feature-based sparse matching method are employed to build a relationship between the same object areas in the mixed stereoscopic image pairs. Additionally, our radiation method can be carried out in the corresponding object areas, which can obtain the radiation consistency images in more detail. The object-oriented method idea is beneficial for the dense matching of building objects in urban areas.
- In the smoothness consistency step, a union group sparse method is proposed based on the original group sparse model. The two different sensor images are improved to similar smoothness levels by the same threshold of singular value.
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Snidero, M.; Amilibia, A.; Gratacos, O.; Blanc, E.J.-P.; Munoz, J.A. The 3D Reconstruction of Geological Structures Based on Remote Sensing Data: Example from the Anaran Anticline, Lurestan Province, Zagros Fold and Thrust Belt, Iran. J. Geol. Soc. 2011, 168, 769–782. [Google Scholar] [CrossRef]
- Marchesi, S.; Bovolo, F.; Bruzzone, L. A context-sensitive technique robust to registration noise for change detection in VHR multispectral images. IEEE Trans. Image Process. 2010, 19, 1877–1889. [Google Scholar] [CrossRef] [PubMed]
- Zhang, G.; Chen, Q.; Sun, Q. Illumination Normalization Among Multiple Remote-Sensing Images. IEEE Geosci. Remote Sens. Lett. 2014, 11, 1470–1474. [Google Scholar] [CrossRef]
- Chen, X.; Vierling, L.; Deering, D. A simple and effective radiometric correction method to improve landscape change detection across sensors and across time. Remote Sensing of Environment. Remote Sens. Environ. 2005, 98, 63–79. [Google Scholar] [CrossRef]
- Paolini, L.; Grings, F.; Sobrino, J.A.; Muñoz, J.C.J.; Karszenbaum, H. Radiometric correction effects in Landsat multi-date/multi-sensor change detection studies. Int. J. Remote Sens. 2006, 27, 685–704. [Google Scholar] [CrossRef]
- Canty, M.J.; Nielsen, A.A.; Schmidt, M. Automatic radiometric normalization of multitemporal satellite imagery. Remote Sens. Environ. 2004, 91, 441–451. [Google Scholar] [CrossRef] [Green Version]
- Canty, M.J.; Nielsen, A.A. Automatic radiometric normalization of multitemporal satellite imagery with the iteratively re-weighted MAD transformation. Remote Sens. Environ. 2008, 112, 1025–1036. [Google Scholar] [CrossRef]
- Nielsen, A.A. The regularized iteratively reweighted MAD method for change detection in multi- and hyperspectral data. IEEE Trans. Image Process. 2007, 16, 463–478. [Google Scholar] [CrossRef] [PubMed]
- Zhang, L.; Wu, C.; Du, B. Automatic Radiometric Normalization for Multitemporal Remote Sensing Imagery with Iterative Slow Feature Analysis. IEEE Trans. Geosci. Remote Sens. 2014, 52, 6141–6155. [Google Scholar] [CrossRef]
- Zhong, C.; Xu, Q.; Li, B. Relative Radiometric Normalization for Multitemporal Remote Sensing Images by Hierarchical Regression. IEEE Geosci. Remote Sens. Lett. 2016, 13, 217–221. [Google Scholar] [CrossRef]
- Crespi, M.; De Vendicti, L.; Poli, D.; Wolff, K.; Colosimo, G.; Gruen, A.; Volpe, F. Radiometric quality and DSM generation analysis of CartoSat-1 stereo imagery. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2008, 37, 1349–1355. [Google Scholar]
- Baltsavias, E.P.; Aksakal-Kocaman, S.; Akca, D.; Wolff, K. Geometric and radiometric investigations of cartosat-1 data. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2007, 36, 1–13. [Google Scholar]
- Baltsavias, E.P.; Pateraki, M.N.; Zhang, L. Radiometric and geometric evaluation of Ikonos GEO images and their use for 3D building modelling. In Proceedings of the Joint Workshop of ISPRS Working Groups I/2, I/5 and IV/7 High Resolution Mapping from Space 2001, Hannover, Germany, 19–21 September 2001. [Google Scholar]
- Poli, D.; Angiuli, E.; Remondino, F. Radiomeric and geometric analysis of WorldView-2 stereo scenes. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2010, 38, 1–6. [Google Scholar]
- Eisenbeiss, H.; Baltsavias, E.; Pateraki, M.N.; Zhang, L. Potential of IKONOS and QUICKBIRD imagery for accurate 3D-Point positioning, orthoimage and DSM generation. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2004, 35, 522–528. [Google Scholar]
- Aguilar, M.Á.; del Mar Saldaña, M.; Aguilar, F.J. Generation and quality assessment of stereo-extracted DSM from GeoEye-1 and WorldView-2 imagery. IEEE Trans. Geosci. Remote Sens. 2014, 52, 1259–1271. [Google Scholar] [CrossRef]
- McCann, M.T.; Mixon, D.G.; Fickus, M.C. Images as occlusions of textures: A framework for segmentation. IEEE Trans. Image Process. 2014, 23, 2033–2046. [Google Scholar] [CrossRef] [PubMed]
- Lowe, D.G. Distinctive image features from scale-invariant keypoints. Int. J. Comput. Vision 2004, 60, 91–110. [Google Scholar] [CrossRef]
- Yuan, J.; Wang, D.L.; Li, R. Image segmentation using local spectral histograms and linear regression. Pattern Recognit. Lett. 2011, 33, 615–622. [Google Scholar] [CrossRef]
- Tian, S.; Zhang, Y.; Yan, Y.; Su, N.; Zhang, J. Remote sensing image segmentation using local sparse structure constrained latent low rank representation. In Proceedings of the SPIE Imaging Spectrometry XXI, San Diego, CA, USA, 19 September 2016. [Google Scholar]
- Golub, G.H.; Reinsch, C. Singular value decomposition and least squares solutions. Numer. Math. 1970, 14, 403–420. [Google Scholar] [CrossRef]
- Li, X.; Shen, H.; Zhang, L.; Li, H. Sparse-based reconstruction of missing information in remote sensing images from spectral/temporal complementary information. ISPRS J. Photogramm. Remote Sens. 2015, 106, 1–15. [Google Scholar] [CrossRef]
- Danielyan, A.; Katkovnik, V.; Egiazarian, K. BM3D Frames and Variational Image Deblurring. IEEE Trans. Image Process. 2012, 21, 1715–1728. [Google Scholar] [CrossRef] [PubMed]
- Zhang, J.; Zhao, D.; Gao, W. Group-based sparse representation for image restoration. IEEE Trans. Image Process. 2014, 23, 3336–3351. [Google Scholar] [CrossRef] [PubMed]
- Dong, W.; Shi, G.; Li, X. Nonlocal image restoration with bilateral variance estimation: A low-rank approach. IEEE Trans. Image Process. 2013, 22, 700–711. [Google Scholar] [CrossRef] [PubMed]
- Yuan, M.; Lin, Y. Model selection and estimation in regression with grouped variables. J. Royal Stat. Soc. Ser. B Stat. Methodol. 2006, 68, 49–67. [Google Scholar] [CrossRef]
- Cai, J.; Candes, E.; Shen, Z. A singular value thresholding algorithm for matrix completion. SIAM J. Optim. 2010, 20, 1956–1982. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| The Original Images | Zhang’s Method | Zhong’s Method | Our Method | |
|---|---|---|---|---|
| Object 1 |  |  |  |  |
| Similarity | 0.748 | 0.750 | 0.763 | 0.905 |
| Object 2 |  |  |  |  |
| Similarity | 0.915 | 0.944 | 0.930 | 0.972 |
| Object 3 |  |  |  |  |
| Similarity | 0.468 | 0.656 | 0.643 | 0.935 |
| Object 4 |  |  |  |  |
| Similarity | 0.907 | 0.973 | 0.966 | 0.980 |
| Object 5 |  |  |  |  |
| Similarity | 0.888 | 0.777 | 0.855 | 0.898 |
| Object 6 |  |  |  |  |
| Similarity | 0.851 | 0.765 | 0.856 | 0.929 |
| Object 7 |  |  |  |  |
| Similarity | 0.814 | 0.769 | 0.835 | 0.847 |
| Object 8 |  |  |  |  |
| Similarity | 0.837 | 0.857 | 0.811 | 0.910 |
| Object 9 |  |  |  |  |
| Similarity | 0.838 | 0.804 | 0.859 | 0.905 |
| Object Number | Origial Images | Zhang’s Method | Zhong’s Method | Our Method |
|---|---|---|---|---|
| 1 | 0.074 | 0.111 | 0.062 | 0.449 |
| 2 | 0.000 | 0.064 | 0.063 | 0.737 |
| 3 | 0.060 | 0.176 | 0.240 | 0.821 |
| 4 | 0.597 | 0.577 | 0.602 | 0.619 |
| 5 | 0.271 | 0.033 | 0.293 | 0.376 |
| 6 | 0.124 | 0.013 | 0.131 | 0.327 |
| 7 | 0.345 | 0.126 | 0.345 | 0.505 |
| 8 | 0.602 | 0.607 | 0.612 | 0.613 |
| 9 | 0.510 | 0.473 | 0.682 | 0.699 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Su, N.; Yan, Y.; Zhao, C.; Wang, L. Object-Oriented Hierarchy Radiation Consistency for Different Temporal and Different Sensor Images. Sensors 2018, 18, 682. https://doi.org/10.3390/s18030682
Su N, Yan Y, Zhao C, Wang L. Object-Oriented Hierarchy Radiation Consistency for Different Temporal and Different Sensor Images. Sensors. 2018; 18(3):682. https://doi.org/10.3390/s18030682
Chicago/Turabian StyleSu, Nan, Yiming Yan, Chunhui Zhao, and Liguo Wang. 2018. "Object-Oriented Hierarchy Radiation Consistency for Different Temporal and Different Sensor Images" Sensors 18, no. 3: 682. https://doi.org/10.3390/s18030682
APA StyleSu, N., Yan, Y., Zhao, C., & Wang, L. (2018). Object-Oriented Hierarchy Radiation Consistency for Different Temporal and Different Sensor Images. Sensors, 18(3), 682. https://doi.org/10.3390/s18030682