The Dynamic Photometric Stereo Method Using a Multi-Tap CMOS Image Sensor †

Abstract
:1. Introduction
2. Photometric Stereo Method
3. Dynamic Photometric Stereo Method Using Multi-Tap CMOS Image Sensor
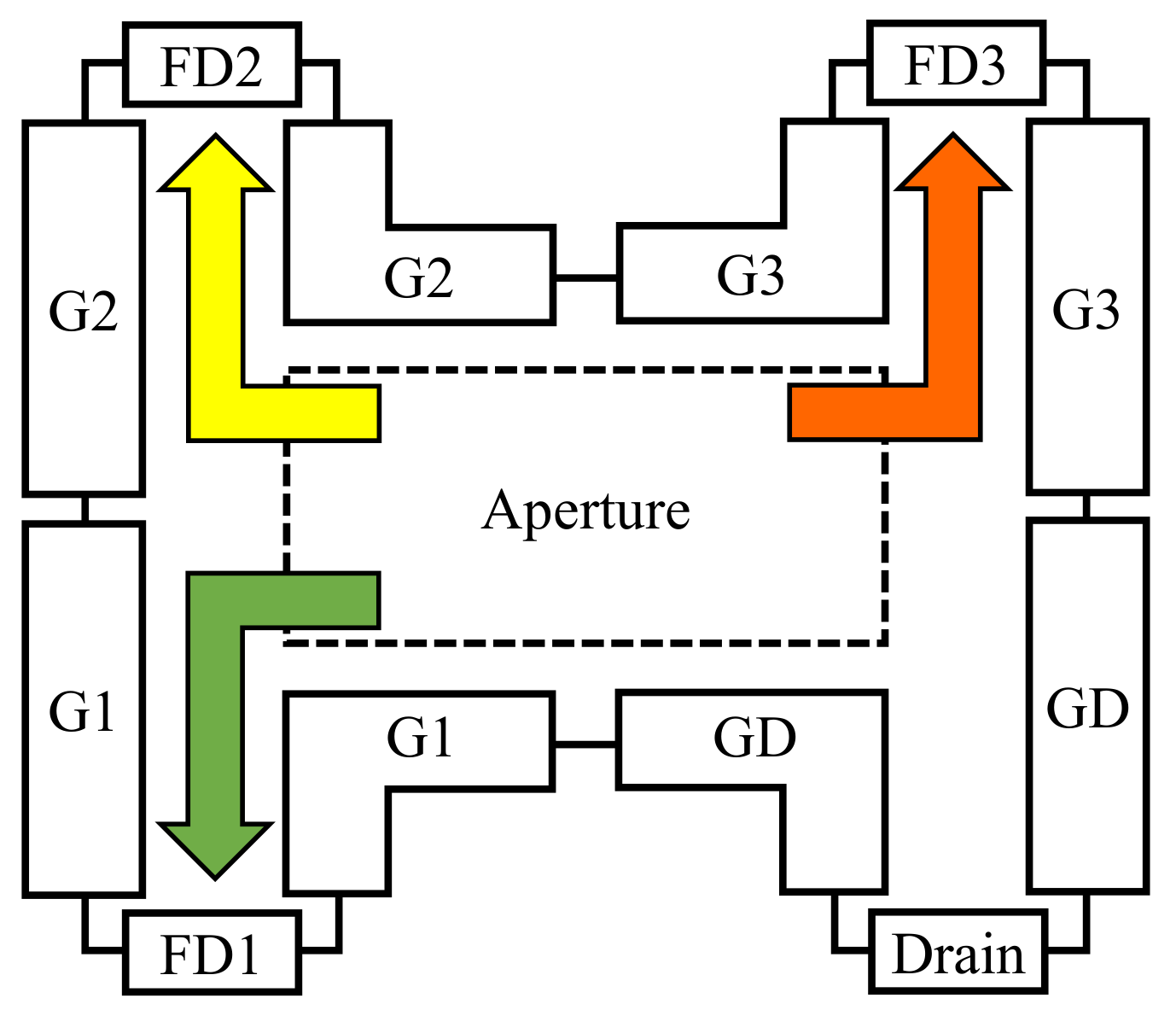
3.1. Multi-Tap CMOS Image Sensor
3.2. Photometric Stereo Method for Dynamic Scene Estimation
4. Implementation
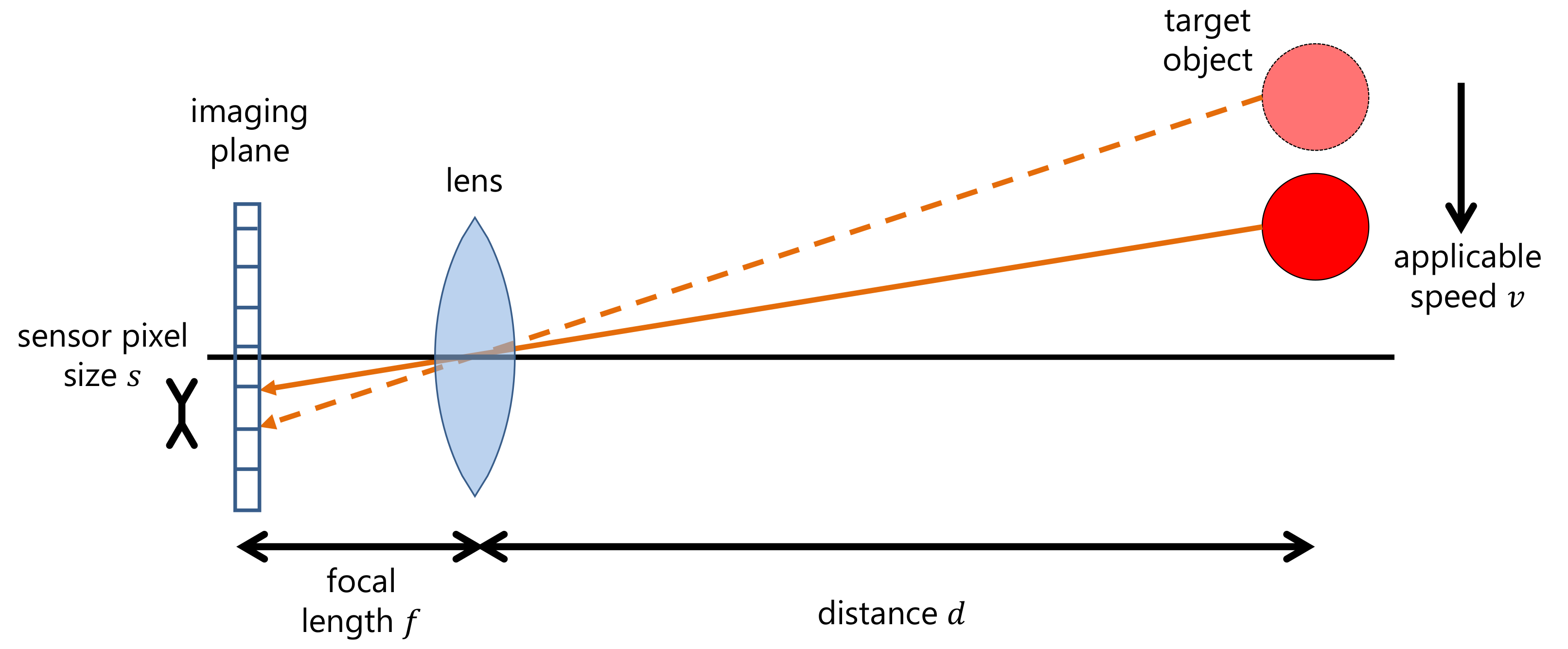
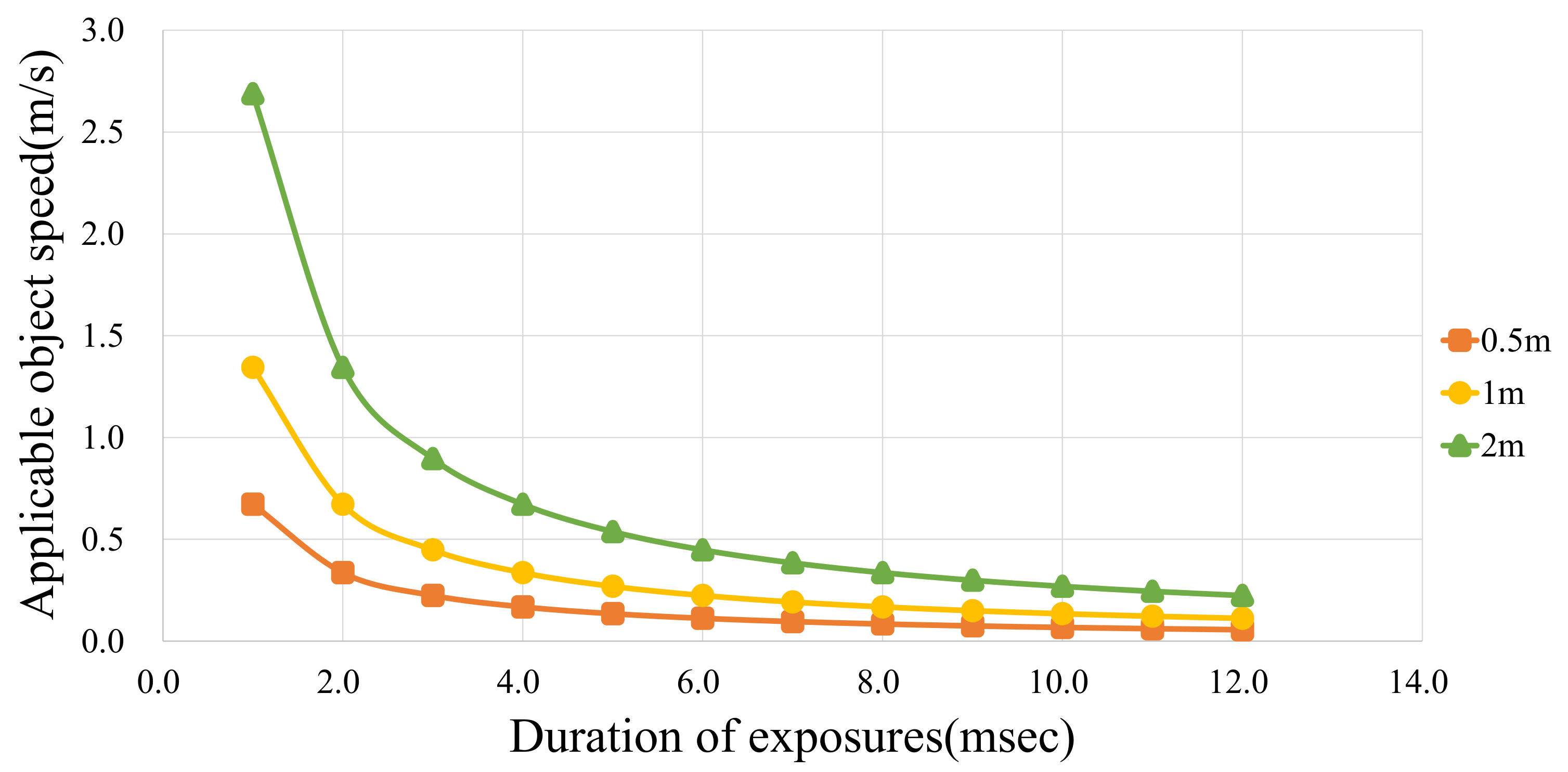
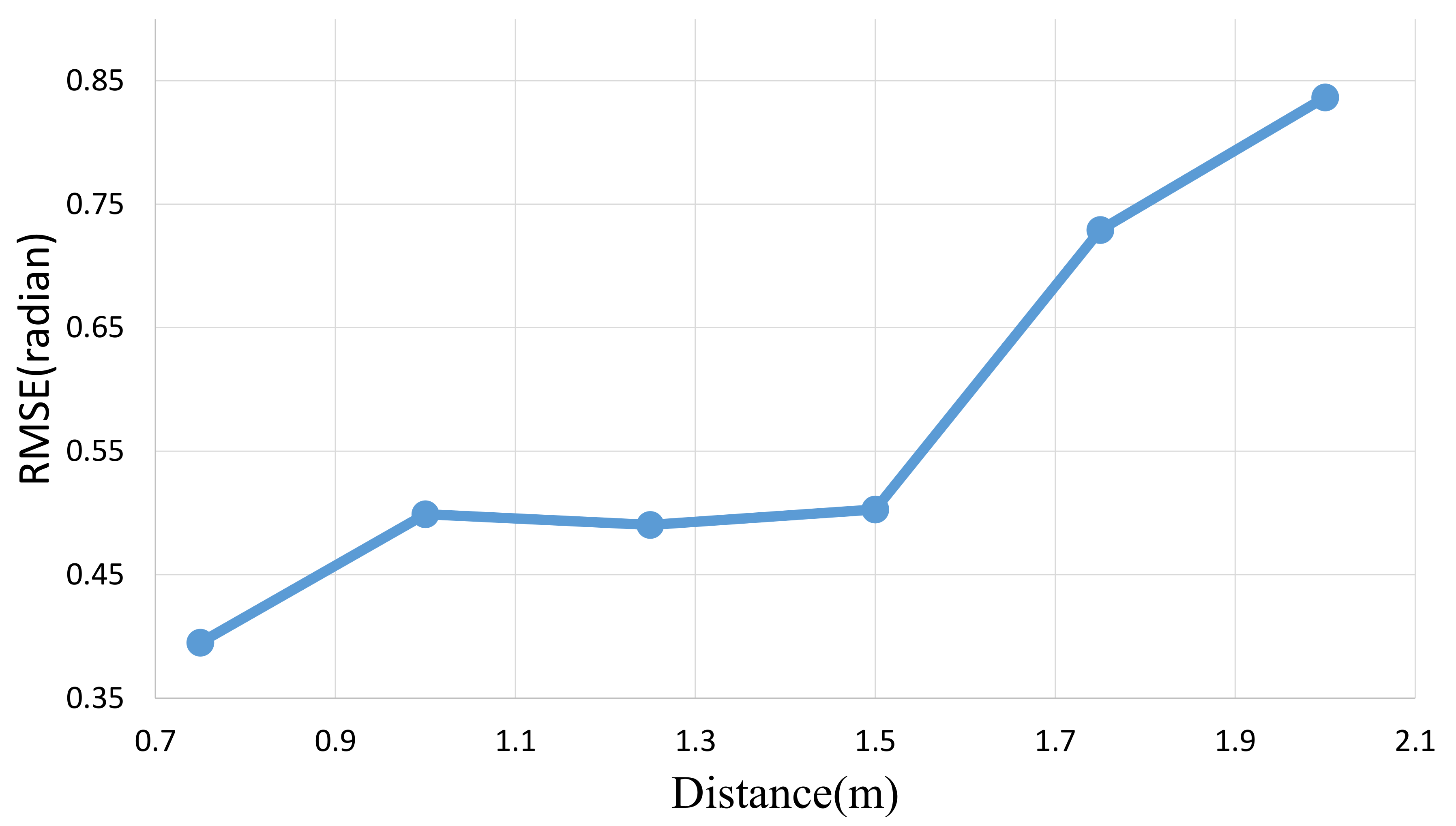
4.1. Determination of the Exposure Duration
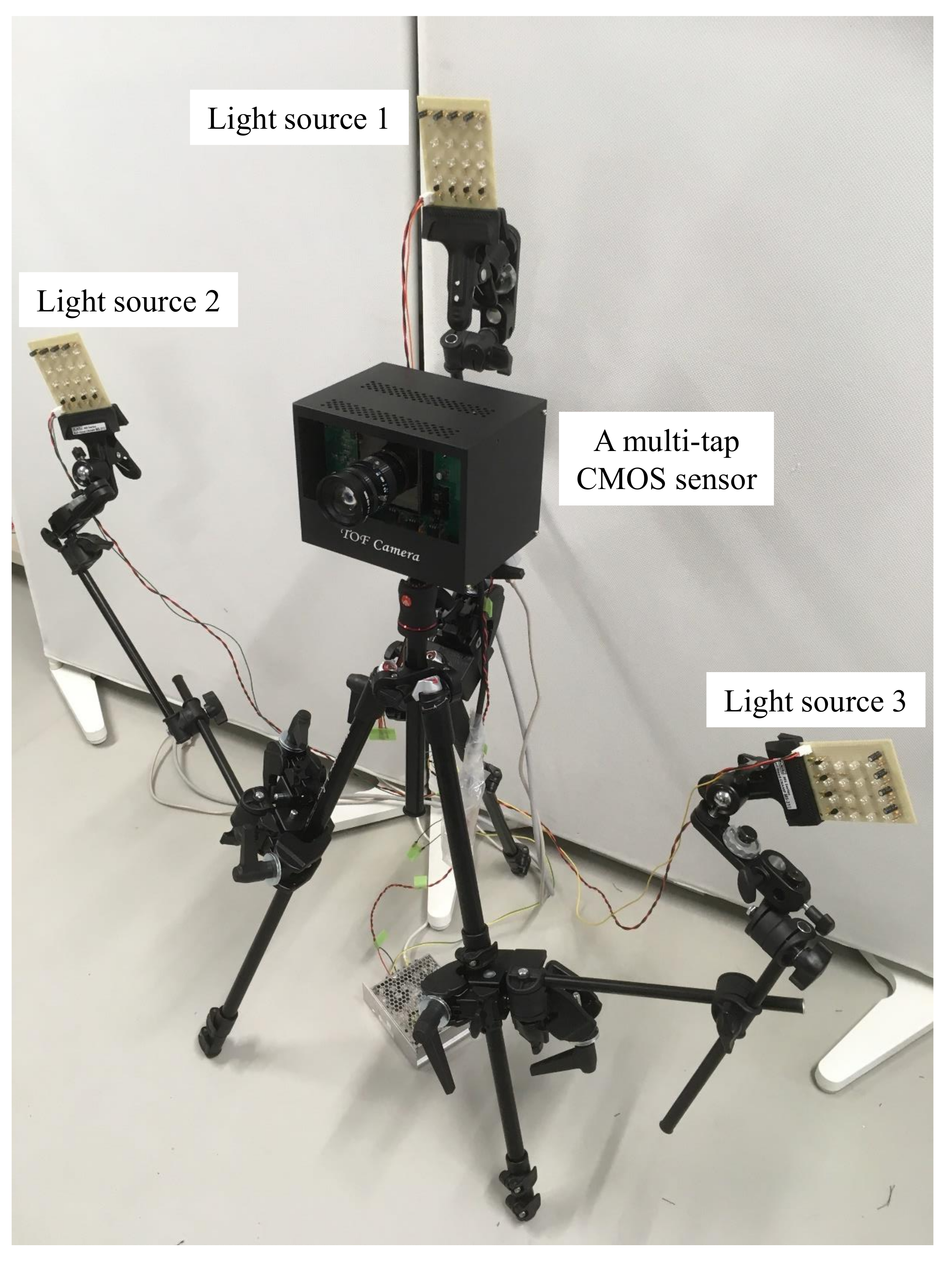
4.2. Camera Lighting System Implementation
4.3. Normal Map Estimation Error
4.4. Image Correction Method
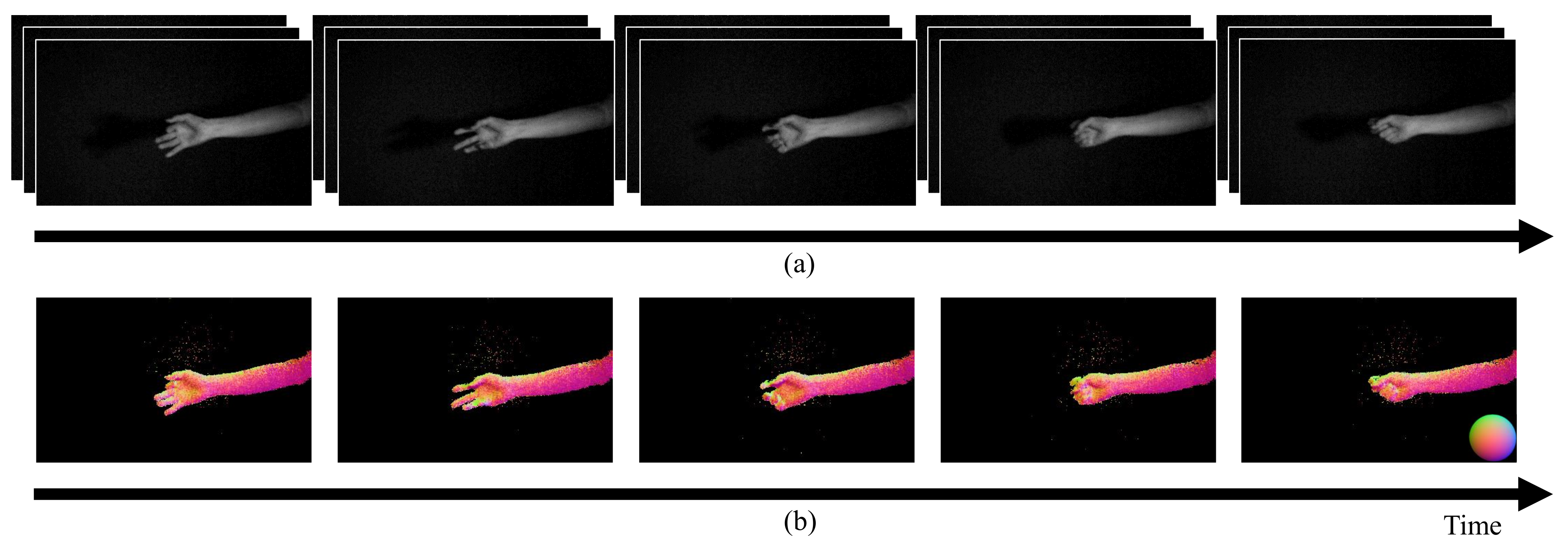
5. Experimental
6. Conclusions
Supplementary Materials
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Salvi, J.; Fernandez, S.; Pribanic, T.; Llado, X. A State of the Art in Structured Light Patterns for Surface Profilometry. Pattern Recogn. 2010, 43, 2666–2680. [Google Scholar] [CrossRef]
- Gokturk, S.; Yalcin, H.; Bamji, C. A time-of-flight depth sensor-system description, issues and solutions. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition Workshop, Washington, DC, USA, 27 June–2 July 2004; p. 35. [Google Scholar]
- Woodham, R.J. Photometric method for determining surface orientation from multiple images. Opt. Eng. 1980, 19, 139–144. [Google Scholar] [CrossRef]
- Gökberk, B.; İrfanoğlu, M.O.; Akarun, L. 3D shape-based face representation and feature extraction for face recognition. Image Vis. Comput. 2006, 24, 857–869. [Google Scholar] [CrossRef]
- Parot, V.; Lim, D.; González, G.; Traverso, G.; Nishioka, N.S.; Vakoc, B.J.; Durr, N.J. Photometric stereo endoscopy. J. Biomed. Opt. 2013, 18, 076017. [Google Scholar] [CrossRef] [PubMed]
- Christensen, P.H.; Shapiro, L.G. Three-dimensional shape from color photometric stereo. Int. J. Comput. Vis. 1994, 13, 213–227. [Google Scholar] [CrossRef]
- Hernández, C.; Vogiatzis, G.; Brostow, G.J.; Stenger, B.; Cipolla, R. Non-rigid Photometric Stereo with Colored Lights. In Proceedings of the 2007 IEEE 11th International Conference on Computer Vision, Rio de Janeiro, Brazil, 14–21 October 2007; pp. 1–8. [Google Scholar]
- Smith, M.; Smith, L. Dynamic Photometric Stereo. In Proceedings of the Image Analysis and Processing— ICIAP 2005, Cagliari, Italy, 6–8 September 2005; Springer: Berlin/Heidelberg, Germany, 2005; pp. 826–833. [Google Scholar]
- Jankó, Z.; Delaunoy, A.; Prados, E. Colour Dynamic Photometric Stereo for Textured Surfaces. In Computer Vision—ACCV 2010; Springer: Berlin/Heidelberg, Germany, 2011; pp. 55–66. [Google Scholar]
- Kim, H.; Wilburn, B.; Ben-Ezra, M. Photometric Stereo for Dynamic Surface Orientations. In Proceedings of the 11th European Conference on Computer Vision, Heraklion, Crete, Greece, 5–11 September 2010; Springer: Berlin/Heidelberg, Germany, 2010; pp. 59–72. [Google Scholar]
- Vlasic, D.; Peers, P.; Baran, I.; Debevec, P.; Popović, J.; Rusinkiewicz, S.; Matusik, W. Dynamic shape capture using multi-view photometric stereo. ACM Trans. Graph. 2009, 28, 174. [Google Scholar] [CrossRef]
- Malzbender, T.; Wilburn, B.; Gelb, D.; Ambrisco, B. Surface Enhancement Using Real-time Photometric Stereo and Reflectance Transformation. In Proceedings of the 17th Eurographics Conference on Rendering Techniques, Eurographics Association, Aire-la-Ville, Switzerland, 26–28 June 2006; pp. 245–250. [Google Scholar]
- Yoda, T.; Nagahara, H.; Taniguchi, R.i.; Kagawa, K.; Yasutomi, K.; Kawahito, S. Dynamic Photometric Stereo Method using Multi-tap CMOS Image Sensor. In Proceedings of the 23rd International Conference on Pattern Recognition, Cancún, Mexico, 4–8 December 2016; pp. 2357–2362. [Google Scholar]
- Goldman, D.B.; Curless, B.; Hertzmann, A.; Seitz, S.M. Shape and Spatially-Varying BRDFs from Photometric Stereo. IEEE Trans. Pattern Anal. Mach. Intell. 2010, 32, 1060–1071. [Google Scholar] [CrossRef] [PubMed]
- Wu, L.; Ganesh, A.; Shi, B.; Matsushita, Y.; Wang, Y.; Ma, Y. Robust Photometric Stereo via Low-Rank Matrix Completion and Recovery. In Proceedings of the Computer Vision—ACCV 2010, Queenstown, New Zealand, 8–9 November 2010; Springer: Berlin/Heidelberg, Germany, 2011; pp. 703–717. [Google Scholar]
- Ikehata, S.; Wipf, D.; Matsushita, Y.; Aizawa, K. Robust photometric stereo using sparse regression. In Proceedings of the 2012 IEEE Conference on Computer Vision and Pattern Recognition, Providence, RI, USA, 16–21 June 2012; pp. 318–325. [Google Scholar]
- Chandraker, M.; Agarwal, S.; Kriegman, D. ShadowCuts: Photometric Stereo with Shadows. In Proceedings of the 2007 IEEE Conference on Computer Vision and Pattern Recognition, Minneapolis, MN, USA, 17–22 June 2007; pp. 1–8. [Google Scholar]
- Coleman, E.N.; Jain, R. Obtaining 3-dimensional shape of textured and specular surfaces using four-source photometry. Comput. Graph. Image Process. 1982, 18, 309–328. [Google Scholar] [CrossRef]
- Solomon, F.; Ikeuchi, K. Extracting the shape and roughness of specular lobe objects using four light photometric stereo. IEEE Trans. Pattern Anal. Mach. Intell. 1996, 18, 449–454. [Google Scholar] [CrossRef]
- Barsky, S.; Petrou, M. The 4-source photometric stereo technique for three-dimensional surfaces in the presence of highlights and shadows. IEEE Trans. Pattern Anal. Mach. Intell. 2003, 25, 1239–1252. [Google Scholar] [CrossRef]
- Sunkavalli, K.; Zickler, T.; Pfister, H. Visibility Subspaces: Uncalibrated Photometric Stereo with Shadows. In Proceedings of the Computer Vision—ECCV 2010, Crete, Greece, 5–11 September 2010; Springer: Berlin/Heidelberg, Germany, 2010; pp. 251–264. [Google Scholar]
- Iwahori, Y.; Sugie, H.; Ishii, N. Reconstructing shape from shading images under point light source illumination. In Proceedings of the 10th International Conference on Pattern Recognition, Atlantic, NJ, USA, 16–21 June 1990; Volume 1, pp. 83–87. [Google Scholar]
- Xie, W.; Dai, C.; Wang, C.C.L. Photometric stereo with near point lighting: A solution by mesh deformation. In Proceedings of the 2015 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Boston, MA, USA, 7–12 June 2015; pp. 4585–4593. [Google Scholar]
- Quéau, Y.; Wu, T.; Cremers, D. Semi-calibrated Near-Light Photometric Stereo. In Scale Space and Variational Methods in Computer Vision; Springer International Publishing: Cham, Switzerland, 2017; pp. 656–668. [Google Scholar]
- Cho, D.; Matsushita, Y.; Tai, Y.W.; Kweon, I. Photometric Stereo Under Non-uniform Light Intensities and Exposures. In Proceedings of the Computer Vision—ECCV 2016, Amsterdam, The Netherlands, 11–14 October 2016; Springer International Publishing: Cham, Switzerland, 2016; pp. 170–186. [Google Scholar]
- Quéau, Y.; Wu, T.; Lauze, F.; Durou, J.D.; Cremers, D. A Non-convex Variational Approach to Photometric Stereo under Inaccurate Lighting. In Proceedings of the 2017 IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017; pp. 350–359. [Google Scholar]
- Fan, H.; Qi, L.; Wang, N.; Dong, J.; Chen, Y.; Yu, H. Deviation correction method for close-range photometric stereo with nonuniform illumination. Opt. Eng. 2017, 56, 1–13. [Google Scholar] [CrossRef]
- Basri, R.; Jacobs, D.; Kemelmacher, I. Photometric Stereo with General, Unknown Lighting. Int. J. Comput. Vis. 2007, 72, 239–257. [Google Scholar] [CrossRef]
- Shi, B.; Matsushita, Y.; Wei, Y.; Xu, C.; Tan, P. Self-calibrating photometric stereo. In Proceedings of the 2010 IEEE Computer Society Conference on Computer Vision and Pattern Recognition, San Francisco, CA, USA, 13–18 June 2010; pp. 1118–1125. [Google Scholar]
- Lu, F.; Matsushita, Y.; Sato, I.; Okabe, T.; Sato, Y. Uncalibrated Photometric Stereo for Unknown Isotropic Reflectances. In Proceedings of the 2013 IEEE Conference on Computer Vision and Pattern Recognition, Portland, OR, USA, 23–28 June 2013; pp. 1490–1497. [Google Scholar]
- Wan, G.; Member, G.S.; Li, X.; Agranov, G. CMOS Image Sensors With Multi-Bucket Pixels for Computational Photography. IEEE J. Solid-State Circuits 2012, 47, 1031–1042. [Google Scholar] [CrossRef]
- Han, S.M.; Takasawa, T.; Yasutomi, K.; Aoyama, S.; Kagawa, K.; Kawahito, S. A Time-of-Flight Range Image Sensor With Background Canceling Lock-in Pixels Based on Lateral Electric Field Charge Modulation. IEEE J. Electron Devices Soc. 2015, 3, 267–275. [Google Scholar] [CrossRef]
- Kinect for Xbox One. Available online: http://www.xbox.com/en-US/xbox-one/accessories/kinect (accessed on 27 November 2017).
- Yang, L.; Zhang, L.; Dong, H.; Alelaiwi, A.; Saddik, A. Evaluating and improving the depth accuracy of Kinect for Windows v2. IEEE Sens. J. 2015, 15, 4275–4285. [Google Scholar] [CrossRef]
- ARDUINO UNO REV3. Available online: https://store.arduino.cc/arduino-uno-rev3 (accessed on 27 November 2017).













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Properties | Implementation of Camera Lighting System in This Work |
|---|---|
| Number of pixels | 413 (H) × 240 (V) (total number of pixels) |
| Pixel size | 16.8 × 16.8 |
| Light source (radiant flux) | 0.8 per light source |
| Exposure time | 33 × 10 iterations = 0.33 for each image |
| Digital gain | 13.0 |
| Readout time | 13.2 to obtain three images |
| Frame rate (data stream) | 70.5 |
| Lens focal length | 12.5 |
| Maximum applicable object speed | 1.3 at a distance of 1.0 |
| No Correction | Same Ratio Correction Method over Whole Image (10) | Pixel-Wise Correction Method (11) | |
| RMSE (radians) | 0.490 | 0.433 | 0.432 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yoda, T.; Nagahara, H.; Taniguchi, R.-i.; Kagawa, K.; Yasutomi, K.; Kawahito, S. The Dynamic Photometric Stereo Method Using a Multi-Tap CMOS Image Sensor. Sensors 2018, 18, 786. https://doi.org/10.3390/s18030786
Yoda T, Nagahara H, Taniguchi R-i, Kagawa K, Yasutomi K, Kawahito S. The Dynamic Photometric Stereo Method Using a Multi-Tap CMOS Image Sensor. Sensors. 2018; 18(3):786. https://doi.org/10.3390/s18030786
Chicago/Turabian StyleYoda, Takuya, Hajime Nagahara, Rin-ichiro Taniguchi, Keiichiro Kagawa, Keita Yasutomi, and Shoji Kawahito. 2018. "The Dynamic Photometric Stereo Method Using a Multi-Tap CMOS Image Sensor" Sensors 18, no. 3: 786. https://doi.org/10.3390/s18030786
APA StyleYoda, T., Nagahara, H., Taniguchi, R. -i., Kagawa, K., Yasutomi, K., & Kawahito, S. (2018). The Dynamic Photometric Stereo Method Using a Multi-Tap CMOS Image Sensor. Sensors, 18(3), 786. https://doi.org/10.3390/s18030786