Mapping Wildfire Ignition Probability Using Sentinel 2 and LiDAR (Jerte Valley, Cáceres, Spain)


 , and
, and
Abstract
:1. Introduction
2. Materials and Methods
2.1. Study Area
2.2. Materials
2.2.1. Sentinel 2
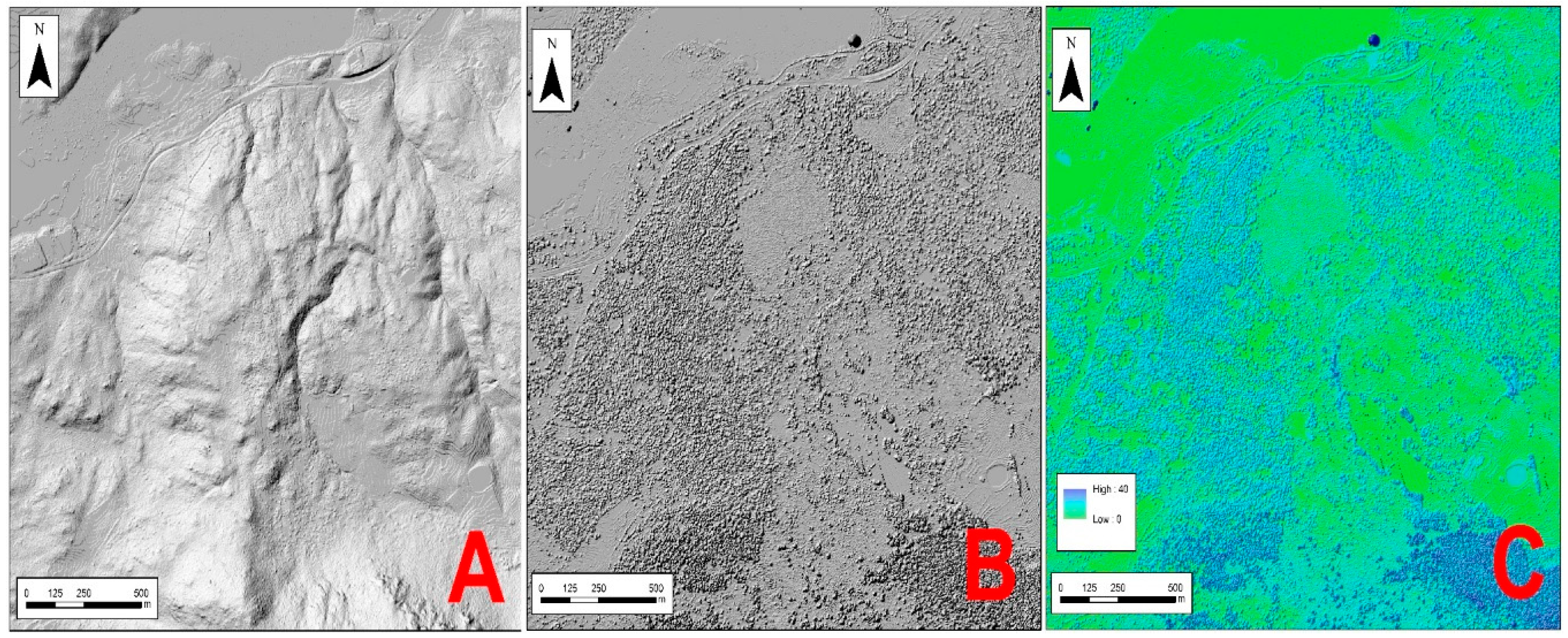
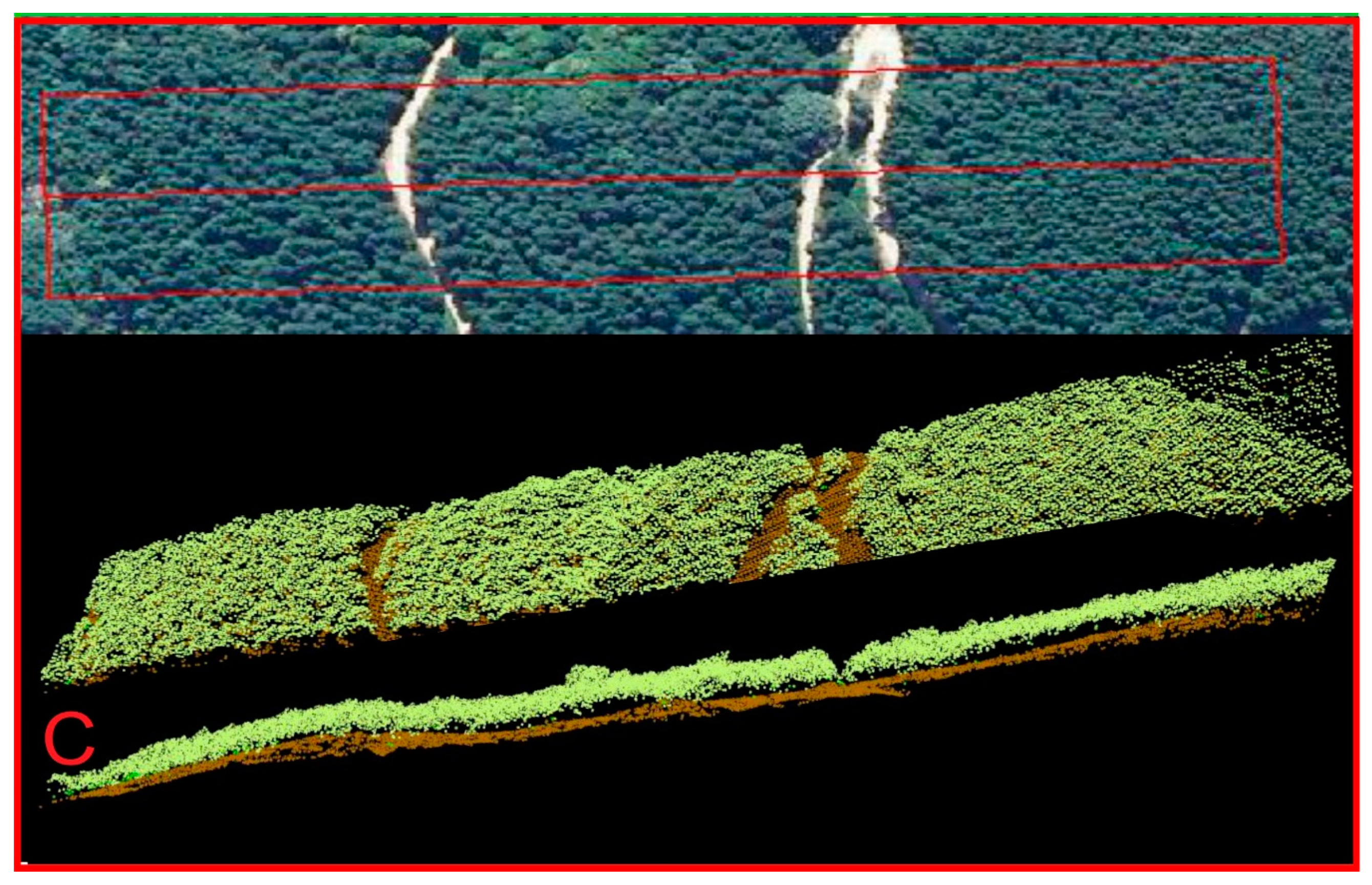
2.2.2. Lidar 2 × 2
2.2.3. Classifications of Fuel Models
2.3. Methods
2.3.1. Vegetation Mapping
2.3.2. Characteristics of the Arboreal Masses
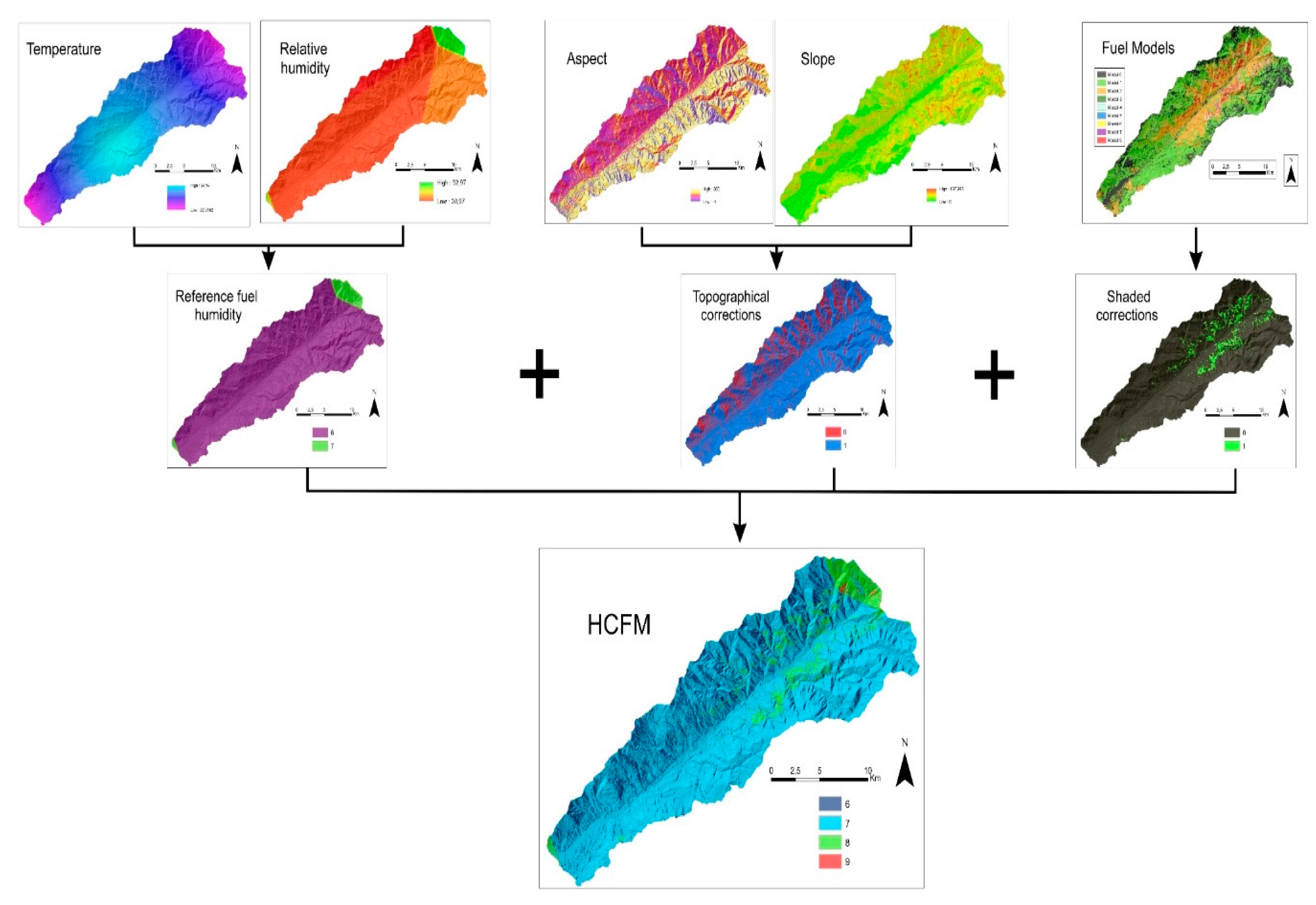
2.3.3. Creation of Fuel-Models Mapping
2.3.4. Probability Ignition Mapping
Creating Trend Maps from Weather Data
2.3.5. Validation
3. Results
3.1. Vegetation Mapping
3.2. Creation of Fuel-Models Mapping
3.3. Ignition-Probability Mapping
4. Discussion
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- González-Delgado, J.A.; Martínez-Graña, A.M.; Civis, J.; Sierro, F.J.; Goy, J.L.; Dabrio, C.F.; Ruiz, F.; González-Regalado, M.L.; Abad, M. Virtual 3D tour of the Neogene palaeontological heritage of Huelva (Guadalquivir Basin, Spain). Environ. Earth Sci. 2015, 73, 4609–4618. [Google Scholar] [CrossRef]
- San-Miguel Ayanz, J.; Moreno, J.; Camia, A. Analysis of large fires in European Mediterranean landscapes: Lessons learned and perpective. Forest Ecol. Manag. 2013, 11–22. [Google Scholar] [CrossRef]
- Martínez-Graña, A.M.; González-Delgado, J.A.; Pallarés, S.; Goy, J.L.; Civis, J. 3D Virtual Itinerary for Education Using Google Earth as a Tool for the Recovery of the Geological Heritage of Natural Areas: Application in the “Las Batuecas Valley” Nature Park (Salamanca, Spain). Sustainability 2014, 6, 8567–8591. [Google Scholar] [CrossRef]
- Koutsias, N.; Karteris, M. Classification analyses of vegetation for delineating forest fire fuel complexes in a Mediterranean test site using satellite remote sensing and GIS. Int. J. Remote Sens. 2003, 24, 3093–3104. [Google Scholar] [CrossRef]
- Bastarrika, A.; Alvarado, M.; Artano, K.; Martinez, M.; Mesanza, A.; Torre, L.; Ramo, R.; Chuvieco, E. BAMS: A Tool for Supervised Burned Area Mapping Using Landsat Data. Remote Sens. 2014, 6, 12360–12380. [Google Scholar] [CrossRef]
- Chuvieco, E.; Yue, C.; Heil, A.; Mouillot, F.; Alonso-Canas, I.; Padilla, M.; Tansey, K. A new global burned area product for climate assessment of fire impacts. Glob. Ecol. Biogeogr. 2016, 1–11. [Google Scholar] [CrossRef]
- Sánchez, Y.; Martínez-Graña, A.; Santos Francés, F.; Yenes, M. Influence of the sediment delivery ratio indexo n the Analysis of silting and break risk in the Plasencia reservoir (Central System, Spain). Nat. Hazards 2018. [Google Scholar] [CrossRef]
- Fernandez-Manso, A.; Fernandez-Manso, O.; Quintano, C. SENTINEL-2A red-edge spectral indices suitability for discriminating burn severity. Int. J. Appl. Earth Obs. Geoinf. 2016, 50, 170–175. [Google Scholar] [CrossRef]
- Nogueira, J.M.P.; Ruffault, J.; Chuvieco, E.; Mouillot, F. Can we go beyong burned area in th assessment of global remote sensing products with fire patch metrics? Remote Sens. 2016, 9, 7. [Google Scholar] [CrossRef]
- Verhegghen, A.; Eva, H.; Ceccherini, G.; Achard, F.; Gond, V.; Gourlet-Fleury, S.; Omar Cerutti, P. The Potential os Sentinel Satellites for Burnt Area Mapping and Monitoring in the Congo Basin Forests. Remote Sens. 2016, 8, 986. [Google Scholar]
- Lumbierres, M.; Méndez, P.F.; Bustamante, J.; Sorieguer, R.; Santamaría, L. Modeling Biomass Production in seasonal wetlands using MODIS NDVI Land Surface Phonology. Remote Sens. 2017, 9, 392. [Google Scholar] [CrossRef]
- Navarro, G.; Caballero, I.; Silva, G.; Parra, P.; Vazquez, A.; Caldeira, R. Evaluation of forest fire on Madeira Island using Sentinel-2A MSI imagery. Int. J. Appl. Earth Obs. Geoinf. 2017, 58, 97–106. [Google Scholar] [CrossRef]
- Schoroeder, W.; Oliva, P.; Giglio, L.; Quayle, B.; Lorenz, E.; Morelli, F. Active fire detecction using Landsat-8/OLI data. Remote Sens. Environ. 2016, 185, 210–220. [Google Scholar] [CrossRef]
- Riaño, D.; Chuvieco, E.; Salas, J.; Palacios-Orueta, A.; Bastarrica, A. Generation of fuel types maps from Landsat TM Images and ancillary data in mediterranean ecosystem. Can. J. Forest Res. 2002, 32, 1301–1315. [Google Scholar] [CrossRef]
- Mata, T.; Burriel, J.; Ibáñez, J.; Vayreda, J. Mapas de Modelos de Combustibles y Modelos de Inflamabilidad en Cataluña; Wildfire: Sevilla, Spain, 2007. [Google Scholar]
- Andersen, H.E.; McGaughey, R.J.; Reutebuch, S.E. Estimating forest canopy fuel parameters using LiDAR data. Remote Sens. Environ. 2005, 94, 441–449. [Google Scholar] [CrossRef]
- Ferraz, A.B. 3-D Mapping of a multi-layered Mediterranean forest using ALS data. Remote Sens. Environ. 2012, 121, 210–223. [Google Scholar] [CrossRef]
- Gonzalez-Olabarria, J.; Rodriguez, F.; Fernadez-Landa, A.; Mola-Yudego, B. Mapping fires risk in the Model Forest of Urbión (Spain) based on airbone LiDAR measurements. Forest Ecol. Manag. 2012, 282, 149–156. [Google Scholar] [CrossRef]
- Erdody, T.L.; Moskal, M. Fusion of LiDAR and imagery for estimating forest canopy fuels. Remote Sens. Environ. 2010, 114, 725–737. [Google Scholar] [CrossRef]
- Kramer, H.C. Quantifying Ladder Fuels: A New Approach Using LiDAR. Forest 2014, 5, 1432–1453. [Google Scholar] [CrossRef]
- Kane, V.; Cansler, C.; Povak, N.; Kane, J.; McGaughey, R.; Lutz, J.; North, M. Mixed severity fire effects within the Rim fire: Relative importance of local climate, fire weather, topography, and forest estructure. Forest Ecol. Manag. 2015, 358, 62–79. [Google Scholar] [CrossRef]
- Contreras, M.A.; Parsons, R.; Chung, W. Modeling tree- level fuel connectiviti to evaluate the effectiveness of thinning treatments for reducing crown fire potencial. Forest Ecol. Manag. 2012, 264, 134–149. [Google Scholar] [CrossRef]
- Martinez-Graña, A.M.; Goy, J.L.; Cimarra, C. 2D to 3D geologic map transformation using virtual globes and flight simulators and their applications in the analysis of geodiversity in natural areas. Environ. Earth Sci. 2015, 73, 8023–8034. [Google Scholar] [CrossRef]
- Carla De Grandi, E.; Mitchard, E.; Hoekman, D. Wavelet Based Analysis of TanDEM-X and LiDAR DEMs across a Tropical Vegetation Heterogeneity Gradient Driven by Fire Disturbance in Indonesia. Remote Sens. 2016, 8, 641. [Google Scholar] [CrossRef]
- Mutlu, M.; Popescu, S.C.; Stripling, C.; Spencer, T. Mapping surface fuel models using LiDAR and multispectral data fusion for fire behavior. Remote Sens. Environ. 2008, 112, 274–285. [Google Scholar] [CrossRef]
- Mutlu, M.; Popescu, S.C.; Zhao, K. Sensitive analysis of fire behaviour modelling with LiDAR- derived surface fuel maps. Forest Ecol. Manag. 2008, 256, 289–294. [Google Scholar] [CrossRef]
- Novozhilov, V. Fire Hazards of some modern Solid Fuels. Energies 2017, 10, 113. [Google Scholar] [CrossRef]
- Simpson, J.E.; Wooster, M.; Smith, T.E.; Triverdi, M.; Vernimmen, R.R.; Dedi, R.; Dinata, Y. Tropical Peatland Burn Depth and Combustion Heterogeneity Assessed Using UAV Photogrammetry and Airbone Lidar. Remote Sens. 2016, 8, 1000. [Google Scholar] [CrossRef]
- Eskandari, S.C. Fire danger assessment in Iran based geospatial information. Int. J. Appl. Earth Obs. Geoinf. 2015, 42, 57–64. [Google Scholar] [CrossRef]
- Martínez-Graña, A.; Boski, T.; Goy, J.L.; Zazo, C.; Dabrio, C.J. Coastal-flood risk management in central Algarve: Vulnerability and flood risk indices (South Portugal). Ecol. Indic. 2016, 71, 302–316. [Google Scholar] [CrossRef]
- Yan, L.; Roy, D.P.; Zhang, H.; Li, J.; Huang, H. An automated aproach for sub-pixel registration of landsat-8 Operational Land Imager (OLI) and Sentinel-2 Multi Spectral Instrument (MSI) Imagery. Remote Sens. 2016, 8, 520. [Google Scholar] [CrossRef]
- Vaglio Laurin, G.; Pirotti, F.; Callegari, M.; Chen, M.; Cuozzon, G.; Lingua, E.; Papale, D. Potential ALOS2 and NDVI to Estimate Forest Above- Ground Biomass, and Comparison with LiDAR-Derived Estimates. Remote Sens. 2016, 9, 18. [Google Scholar] [CrossRef]
- Martínez-Graña, A.M.; Goy, J.L.; De Bustamante, I.; Zazo, C. Characterisation of environmental impact on resources, using strategic assessment of environmental impact and management of natural spaces of “Las Batuecas-Sierra de Francia” and “Quilamas” (Salamanca, Spain). Environ. Earth Sci. 2014, 71, 39–51. [Google Scholar]
- Aguado, I.; Camia, A. Fundamentos y utilización de índices meteorológicos de peligro de incendio. Serie Geogr. 1998, 7, 49–58. [Google Scholar]
- Carrasco González, R. Geomorfología del Valle del Jerte. Las líneas Maestras del Paisaje. Diss. Ph.D. Thesis, Universidad de Extremadura, Cáceres, Spain, 2000. [Google Scholar]
- SiAR, S.D. Ministerio de Agricultura y Pesca, Alimentación y Medio Ambiente. Available online: http://eportal.mapama.gob.es/websiar/Inicio.aspx (accessed on 2 May 2017).
- Mandanici, E.; Biteli, G. Preliminary Comparison of Sentinel-2 and Landsat 8. Remote Sens. 2016, 8, 1014. [Google Scholar] [CrossRef]
- Norman, S.P.; Hargrove, W.W.; Christie, W.M. Spring and Autumn Phenological VAriability across Enviromental Gradients of Great Smoky Mountains National, Park, USA. Remote Sens. 2017, 9, 407. [Google Scholar] [CrossRef]
- ESA. Copernicus. (European Space Agency) Obtenido de Observing the Earth. Available online: http://www.esa.int/Our_Activities/Observing_the_Earth/Copernicus/Sentinel-2 (accessed on 3 May 2017).
- Blanco, J.; Gracía, D.; Castellnou, M.; Grillo, F. Curso Básico de Incendios Forestales; Universidad de Lérida: Lérida, Spain, 2007. [Google Scholar]
- Albini, F.A. Estimating Wildfire Behaviour and Effects; General Technical Report; Departament of Agriculture, Forest Service, Intermountain Forest and a Range Experiment Station: Ogden, UT, USA, 1976; 92p.
- Burgan, R.; Rothermel, R. BEHAVE: Fire Behaviur Prediction and Fuel Modelling System-Fuel Subsystem; USDA Forest Service: Ogden, UT, USA, 1984.
- Rothermel, R. How to Predict the Spread and Intensity of Forest and Range Fires; US Department of Agriculture, Forest Service, Intermountain Forest and Range Experiment Station: Ogden, UT, USA, 1983.
- Anderson, H.E. Aids to Determining Fuel Models for Estimating Fire Behaviour; General Technical Report; US Department of Agriculture-Forest Service, Intermountain Research Station: Ogden, UT, USA, 1982; pp. 1–22.
- Gascon, F.; Bouzinac, C.; Thepaut, O.; Jung, M.; Francesconi, B.; Louis, J.; Cadau, E. Copernicus Sentinel 2A Calibration a Products VAlidation Status. Remote Sens. 2017, 9, 584. [Google Scholar] [CrossRef]
- Hollstein, A.S. Ready-to-Use Methods for the Detection of Clouds, Cirrus, Snow, Shadow, Water and Clear Sky Pixels in Sentinel-2 MSI Images. Remote Sens. 2016, 8, 666. [Google Scholar] [CrossRef]
- Team, Q.D. Quantum GIS Geosgraphic Information System. Open Source Geospatial Fundation Project. Obtenido de. Available online: http://qgis.osgeo.org (accessed on 15 December 2016).
- Congedo, L. Semi-Automatic Classification Plugin Documentation. Release 5.3.6.1. 2018. Available online: https://media.readthedocs.org/pdf/semiautomaticclassificationmanual-v5/latest/semiautomaticclassificationmanual-v5.pdf (accessed on 9 March 2018).
- Spits, C.; Wallace, L.; Reinke, K. Investigating Surface and Near-Surface Bushfire Fuel Attributes: A Comparison between Visual Assessments and Image-Based Point Clouds. Sensors 2017, 17, 910. [Google Scholar] [CrossRef] [PubMed]
- Amani, M.; Salehi, B.; Mahdavi, S.; Granger, J. Spectral Analysis of wetlands in Newfoundland using Sentinel 2A and Landsat 8 imagery. In Proceedings of the IGTF 2017-Imaging & Geospatial Technology Forum: ASPRS Annual Conference, Baltimore, MD, USA, 12–16 March 2017. [Google Scholar]
- García, M.; Riaño, D.; Chuvieco, E.; Salas, J.; Mark Danson, F. Multiespectral and LiDAR data fusion for furl type mapping using Support Vector Machine and decision rules. Remote Sens. Environ. 2011, 115, 1369–1379. [Google Scholar] [CrossRef]
- ESRI. ArcGIS Desktop 10.5; Environmental Systems Research Institute: Redlands, CA, USA, 2017. [Google Scholar]
- Marino, E.; Ranz, P.; Tomé, J.; Noriega, M.; Esteban, J.; Madrigal, J. Generation of high-resolution fuel model maps from discrete airborne laser scanner and Landsat-8 OLI: A low-cost and highly updated methodology for large areas. Remote Sens. Environ. 2016, 267–280. [Google Scholar] [CrossRef]
- Molina, D.M.; Bardají, M.; Castellnou, M. Probabilidad de Ignición, grandes incendios y dificultad de extinción. Ecología 1998, 12, 333–350. [Google Scholar]
- Alonso-Benito, A.; Arroyo, L.; Arbelo, M.; Hernandez-Leal, P. Fusion of world View-2 and LiDAR Data to Map Fuel Types in the Canary Islands. Remote Sens. 2016, 8, 669. [Google Scholar] [CrossRef]
- Pettinari, M.; Chuvieco, E. Cartografía de combustible y potenciales de incendios en el continente africano utilizando FCCS. Rev. Teledetec. 2015, 43, 1–10. [Google Scholar] [CrossRef]
- Immitzer, M.V. First Experience with Sentinel-2 Data for Crop and Tree Species Classifications in Central Europe. Remote Sens. 2016, 8, 166. [Google Scholar] [CrossRef]
- Escolà, A.; Badia, N.; Arnó, J.; Martínez-Casasnovas, J. Using Sentinel-2 imagen to implement Precision Agriculture techniques in large arable fields. First result of a case study. Adv. Anim. Biosci. 2017, 377–382. [Google Scholar] [CrossRef]
- Kupková, L.; Cervena, L.; Suchá, R.; Jakesová, L.; Zagajewski, B.; Brezina, S.; Albrechtová, J. Classification of tundra vegetation in the Krkonose Mts. National Park Using APEX, AISA Dual and Sentinel 2-a Data. Eur. J. Remote Sens. 2017, 50, 30–46. [Google Scholar] [CrossRef]
- Liu, K.; Wang, J.; Zeng, W.; Song, J. Comparison and Evaluation of Three Methods for Estimating Forest above Ground Biomass Using TM and GLAS Data. Remote Sens. 2017, 9, 341. [Google Scholar] [CrossRef]
- Gopalakrishnan, R.; Thomas, V.A.; Coulston, J.W.; Wynne, R.H. Prediction of Canopy Heights over a Large Region Using Heterogeneous Lidar Dataset: Efficacy and Challenges. Remote Sens. 2015, 7, 11036–11060. [Google Scholar] [CrossRef]
- Jones Kachamba, D.; Ole Orka, H.; Naesset, E.; Eid, T.; Gobakken, T. Influence of Plot Size on Efficiency of Biomass Estimates in Inventtories of Dry Tropical Forest Assisted by Photogrammetric Data from an Unmanned Aircraft System. Remote Sens. 2017, 9, 610. [Google Scholar] [CrossRef]
- Lucrecia Pettinari, M.; Chuvieco, E. Fire Behavior Simulation from Global Fuel and Climatic Information. Forest 2017, 8, 179. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| SENTINEL-2 Radiometric and Spatial Resolutions | |||
|---|---|---|---|
| Band Number | Name | Central Wavelength (nm) | Spatial Resolution (m) |
| 1 | aerosols | 443 | 60 |
| 2 | blue | 490 | 10 |
| 3 | green | 560 | 10 |
| 4 | red | 665 | 10 |
| 5 | NIR | 705 | 20 |
| 6 | NIR | 740 | 20 |
| 7 | NIR | 783 | 20 |
| 8 | NIR | 842 | 10 |
| 8a | NIR | 865 | 20 |
| 9 | Water vapour | 945 | 60 |
| 10 | Cirrus detection | 1375 | 60 |
| 11 | SWIR | 1610 | 20 |
| 12 | SWIR | 2190 | 20 |
| Camera | Aerial Orthophotography |
|---|---|
| Laser spectral band | panchromatic, blue, green and red |
| Laser pulse density | 2 points/m2 |
| The pixel size | 0.20 m |
| Flying height | Maximum 3000m |
| Horizontal accuracy | 0.30 m |
| Vertical accuracy | 0.20m |
| Type | Model | Short Description |
|---|---|---|
| Urban area | 0 | Infrastructures and towns |
| Grasslands | 1 | Fine dry grass, with possible appearance of herbaceous plants covering a smaller area up to 1/3. Fuel load from 1 to 2 T/ha |
| 2 | Fine dry grass, with clear presence of bushes and trees that cover an area of 1/3 to 2/3. Fuel load of 5 to 10 T/ha | |
| 3 | Coarse, dense, dry and high grass (>1 m). Fuel load of 4 to 6 T/ha. | |
| Scrubland | 4 | Very dense or young thicket repopulate without performances. Fuel load of 25 to 35 T/ha |
| 5 | Dense and green undergrowth less than 0.6 m high. Fuel load of 5 to 8 T/ha. | |
| 6 | Scrub older than model 5 with heights between 0.6 y 1.2 m. Fuel load of 10 to 15 T/ha. | |
| 7 | Flammable species (heath, jars) as the understory of conifers or hardwoods. Fuel load of 10 to 15 T/ha. | |
| Lush leaf under trees | 8 | Dense forest of conifers and hardwoods with compact leaf litter. Fuel load of 10 to 12 T/ha. |
| 9 | Forests with less compact leaf litter, long-leaf conifers, and broadleaved conifers. Fuel load of 7 to 9 T/ha. | |
| 10 | Dense forest with dead wood or infected forest. Fuel load of 30 to 35 T/ha. | |
| Remains of cut and other forestry operations | 11 | Clear and strongly clear forest. Fuel load of 25 to 30 T/ha. |
| 12 | Predominance of remains on the trees. Fuel load of 50 to 80 T/ha. | |
| 13 | Accumulations of thick and heavy debris covering the ground. Fuel load of 100 to 150 T/ha. |
| FCCg | Canopy cover fraction | |
| FCCc | Canopy cover fraction overstory | |
| FCCs | Canopy cover fraction understory |
| FCC < 1/3 | M1 | ||
| FCC 1/3–2/3 | M2 | ||
| FCC > 2/3 | grassland | M3 | |
| scrubland | >2 m | M4 | |
| <0.6 m | M5 | ||
| >0.6 (0.6–1.2) | M6 | ||
| FCC overstory > 0.3 FCC understory > 0.3 0.6–2 m understory or inflammable scrubland | M7 | ||
| woodland without understory | P. sylvestris | M8 | |
| FCC overstory > 0.3 FCC understory < 0.3 Castanea sativa, Quercus sp; P. pinaster | M9 | ||
| Stations | Average Temperature (°C) | Average Humidity (%) | Coordinate X (m) | Coordinate Y (m) |
|---|---|---|---|---|
| Losar del Barco | 20.1 | 52.9 | 285,381 | 4,472,220 |
| Valdeastillas | 24.5 | 39.8 | 255,607 | 4,447,376 |
| Gargantilla | 24.0 | 38.9 | 249,777 | 4,458,446 |
| Jarandilla de la Vera | 24.0 | 41.8 | 274,426 | 4,442,377 |
| Aldehuela del Jerte | 19.1 | 48.1 | 736,412 | 4,433,680 |
| Reference Data | Total | User’s Accuracy (%) | Kappa | ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Water | Castanea sativa | Prunus avium | Quercus ilex | Shrublands | Grasslands | Pinus pinaster | Village | Quercus pyrenaica | Rocky | Bare Soil | |||||
| Classified Data | Water | 6 | 0 | 0 | 0 | 0 | 1 | 0 | 1 | 1 | 0 | 1 | 10 | 0.60 | 0 |
| Castanea sativa | 0 | 22 | 0 | 0 | 0 | 1 | 0 | 0 | 1 | 0 | 0 | 24 | 0.92 | 0 | |
| Prunus avium | 0 | 1 | 102 | 1 | 2 | 2 | 0 | 1 | 1 | 3 | 7 | 120 | 0.85 | 0 | |
| Quercus ilex | 0 | 0 | 2 | 65 | 5 | 2 | 0 | 0 | 2 | 12 | 3 | 91 | 0.71 | 0 | |
| Shrublands | 0 | 0 | 0 | 0 | 59 | 0 | 0 | 0 | 0 | 0 | 0 | 59 | 1.00 | 0 | |
| Grasslands | 0 | 0 | 0 | 0 | 0 | 50 | 0 | 0 | 0 | 0 | 0 | 50 | 1.00 | 0 | |
| Pinus pinaster | 0 | 0 | 0 | 0 | 0 | 0 | 18 | 0 | 0 | 0 | 0 | 18 | 1.00 | 0 | |
| Village | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 5 | 1 | 0 | 3 | 10 | 0.50 | 0 | |
| Quercus pyrenaica | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 36 | 0 | 0 | 36 | 1.00 | 0 | |
| Rocky | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 3 | 0 | 26 | 0 | 30 | 0.87 | 0 | |
| Bare Soil | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 56 | 56 | 1.00 | 0 | |
| Total | 6 | 23 | 104 | 66 | 66 | 58 | 18 | 10 | 42 | 41 | 70 | 504 | 0.00 | 0 | |
| Producer’s Accuracy | 1.00 | 0.96 | 0.98 | 0.98 | 0.89 | 0.86 | 1.00 | 0.50 | 0.86 | 0.63 | 0.80 | 0 | 0.88 | 0 | |
| Kappa | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.86 | |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sánchez Sánchez, Y.; Martínez-Graña, A.; Santos Francés, F.; Mateos Picado, M. Mapping Wildfire Ignition Probability Using Sentinel 2 and LiDAR (Jerte Valley, Cáceres, Spain). Sensors 2018, 18, 826. https://doi.org/10.3390/s18030826
Sánchez Sánchez Y, Martínez-Graña A, Santos Francés F, Mateos Picado M. Mapping Wildfire Ignition Probability Using Sentinel 2 and LiDAR (Jerte Valley, Cáceres, Spain). Sensors. 2018; 18(3):826. https://doi.org/10.3390/s18030826
Chicago/Turabian StyleSánchez Sánchez, Yolanda, Antonio Martínez-Graña, Fernando Santos Francés, and Marina Mateos Picado. 2018. "Mapping Wildfire Ignition Probability Using Sentinel 2 and LiDAR (Jerte Valley, Cáceres, Spain)" Sensors 18, no. 3: 826. https://doi.org/10.3390/s18030826
APA StyleSánchez Sánchez, Y., Martínez-Graña, A., Santos Francés, F., & Mateos Picado, M. (2018). Mapping Wildfire Ignition Probability Using Sentinel 2 and LiDAR (Jerte Valley, Cáceres, Spain). Sensors, 18(3), 826. https://doi.org/10.3390/s18030826