1. Introduction
Affections in the visual system can lead to visual impairment and in the worst cases to blindness, which may prevent individuals from performing several activities of daily living, including study, work, and sports practice [
1]. According to the World Health Organization [
2], there are approximately 38 million people suffering from blindness worldwide, whereas other 110 million have other types of visual impediments. These statistics indicate that several degrees of blindness affect seven in 1000 people, considering an estimated world population of 5.3 billion. Unfortunately, above 90% of the people suffering from blindness live in developing countries.
By 1987, the statistics determined that 598,000 people around the USA met the legal threshold of blindness, 58% of whom were over 65 years old. Then, between 1994 and 1995, the number of Americans meeting the legal threshold of blindness increased to approximately 1.3 million. According to an article on the magnitude and causes of visual impairment [
3], there were 161 million of visually impaired people in 2002 worldwide. From them, 124 million (~2% of the world population) had low vision, and 37 million (~0.6% of the world population) were completely blind. By 2020, the number of blind people over 60 years old is expected to grow above 54 million worldwide at the current rate [
2].
Iraq is a country where visual impairment is a predominant problem given the widespread terrorist activity and birth defects in newborns caused by water and food contamination. Nevertheless, technology advancements have allowed to offer aid to those living in unfortunate circumstances. Thus, visually impaired individuals are currently able to independently perform activities of daily living such as walking through the streets and navigating within buildings.
Besides improved mobility, most people suffering from visual impairment need aids to perceive obstacles and are usually assisted by other persons. Nevertheless, previous research has provided several solutions to overcome the problems of visually impaired persons (VIPs) and give them more independence, but these solutions have not completely addressed safety measures when VIPs are walking by themselves. Moreover, the proposed solutions do not integrate a means for blind people to be in continuous contact with their families and caregivers and are usually complex and expensive.
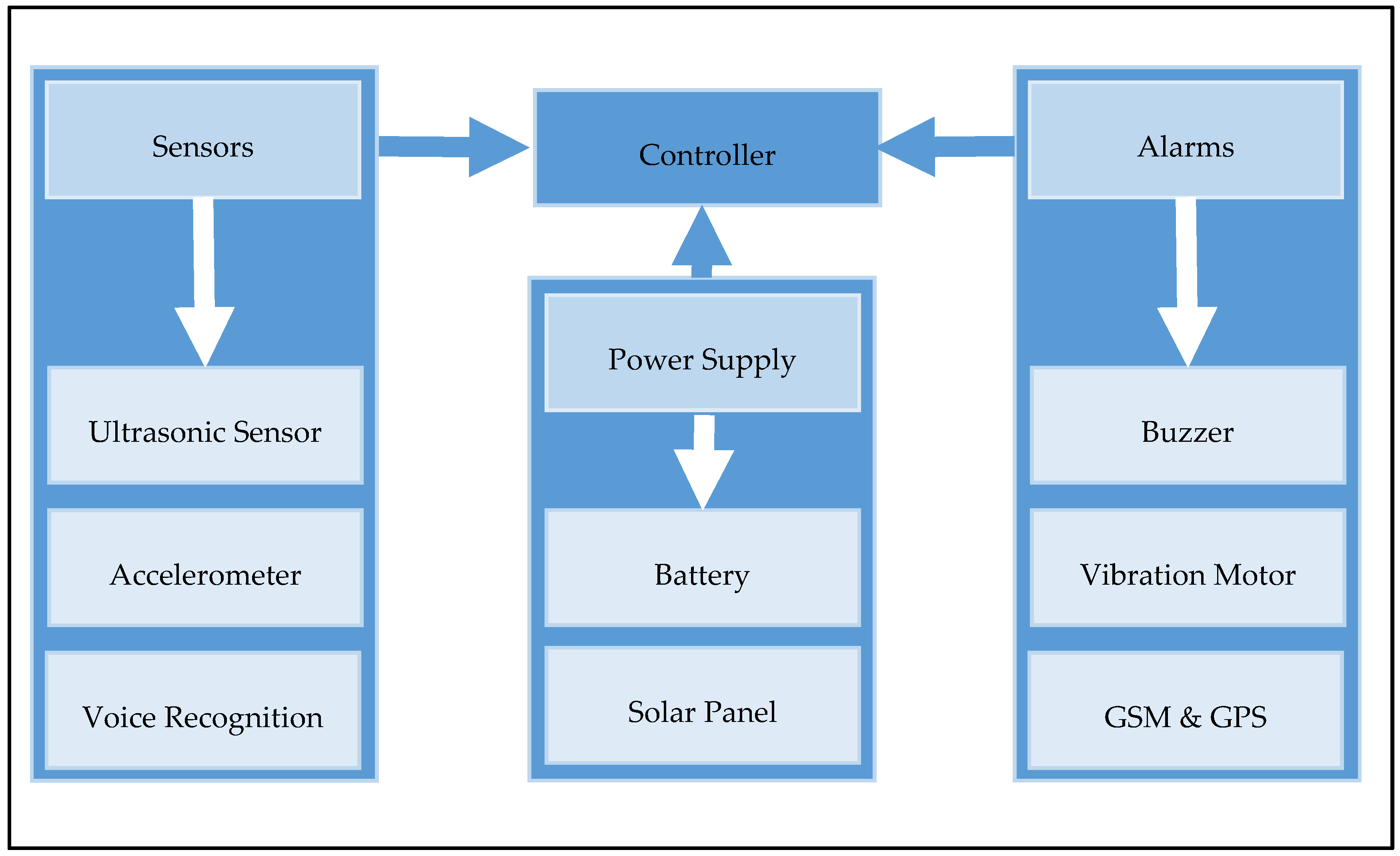
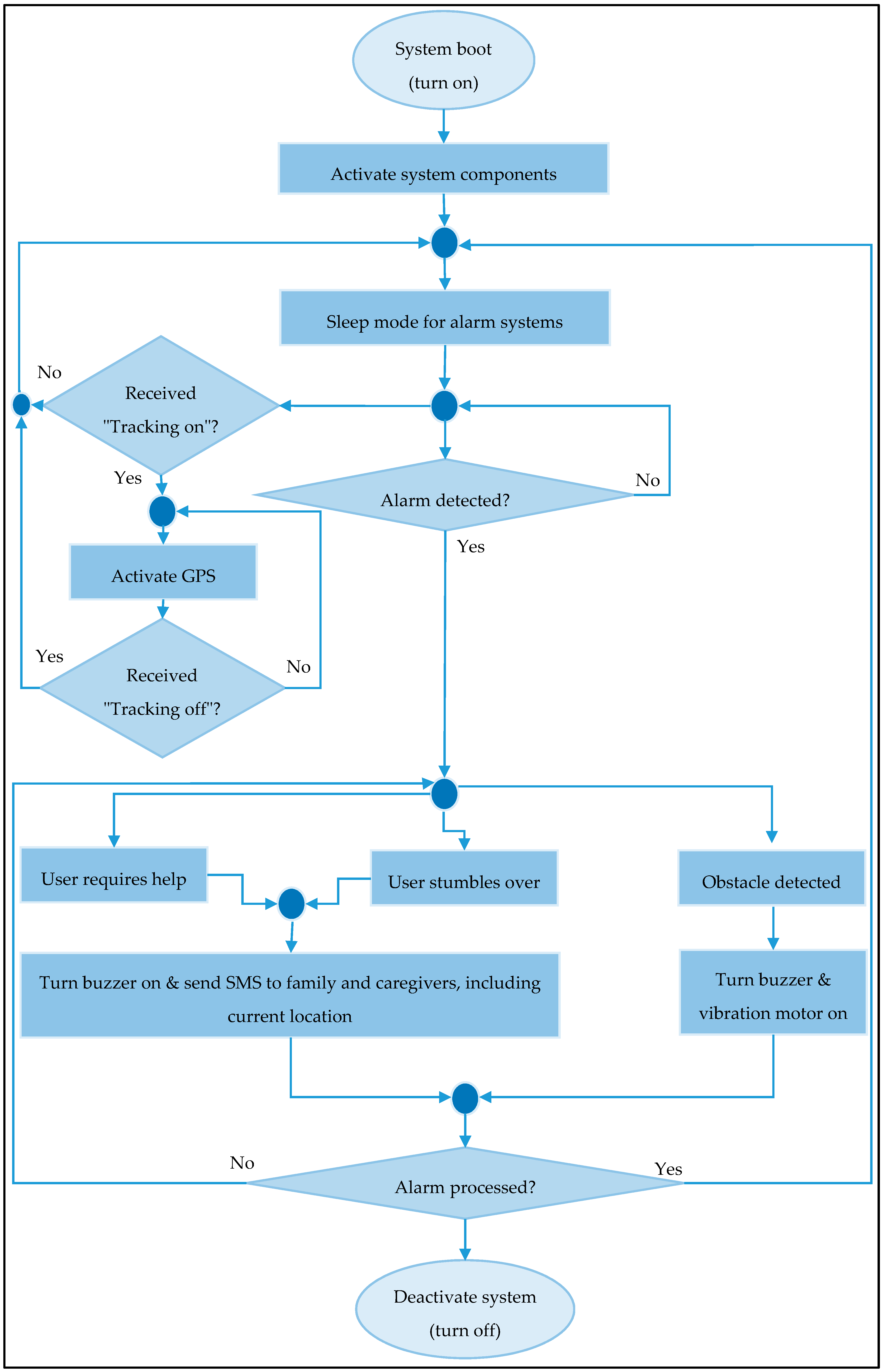
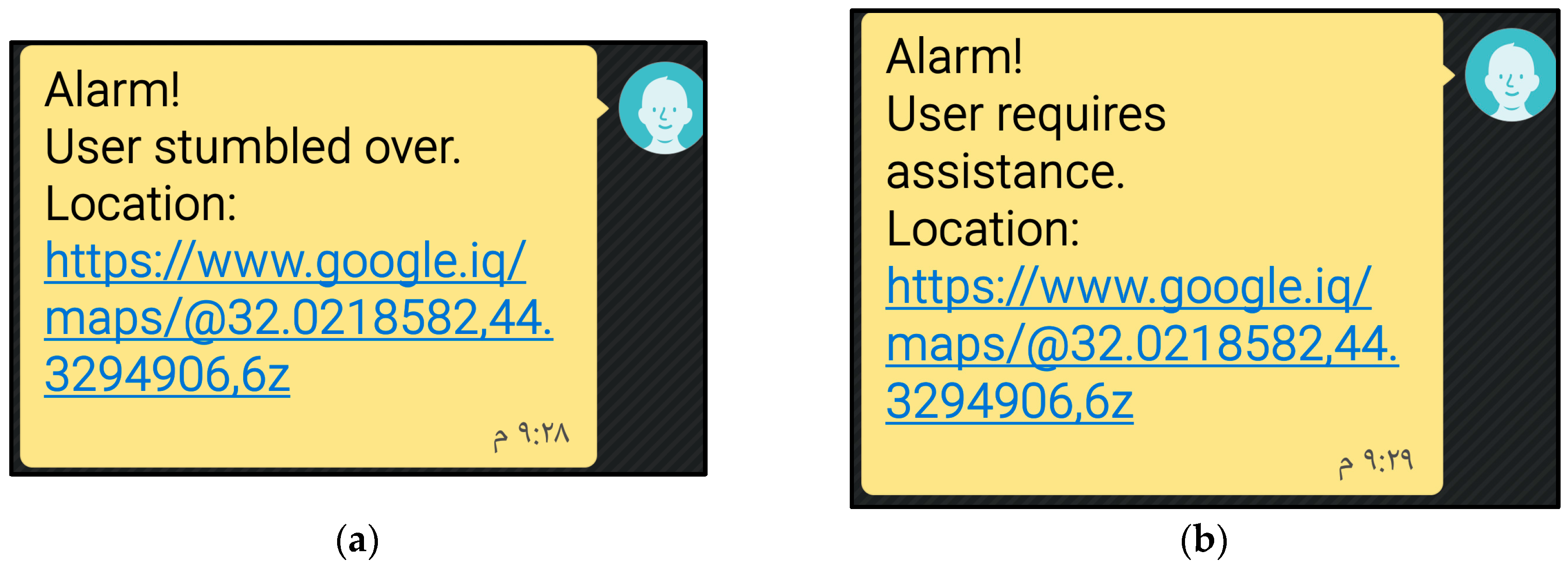
In this paper, we propose a system with several features to provide VIPs with a means for safe and independent mobility and continuous contact with their families and caregivers, who are able to track their location. The system relies on sensors to detect objects at some distance in front of the user, alert the family and caregivers when the user stumbles over, and alert the family, caregivers, and surrounding people when the user requires assistance. In the sequel, we discuss similar systems that have been previously proposed.
2. Related Work
Sangami et al. [
4] proposed a system that uses a white cane to improve the mobility of blind and VIPs without requiring further assistance. The system consists of a sonar sensor to help avoiding obstacles, a GPS module to provide localization data, radio frequency (RF) identification (RFID) tags for indoor localization and estimation of the locomotion direction, thus overcoming the GPS indoor limitations, and a Global System for Mobile Communications (GSM) module to send alerting messages to caregivers.
Likewise, Kher Chaitrali et al. [
5] implemented a navigation gadget that provides voice output for obstacle and location awareness. The gadget contains an infrared sensor, an RFID reader, and runs the Google’s Android operating system, which allows connection to an Android phone through Bluetooth. In addition, the gadget hardware consists of a printed circuit board containing a microcontroller, an analog-to-digital converter, an infrared sensor, and a Bluetooth module. The software has two user profiles, one for the VIP and the other for a family member or caregiver to monitor the person. The application provides details such as the server IP address, contact number, and authentication information delivered through Bluetooth, which after connection allows to set the threshold value for the infrared sensor, which triggers a vibration alert with voice output when nearby objects are detected. Moreover, the system contains a database with information on RFID tags and their corresponding location. This information is retrieved as voice output to the user when a tag is detected by the RFID reader. The monitoring profile in the application also helps localizing the VIP.
Morad [
6] designed a GPS-based device as a localization aid for visually impaired users. It consists of a microcontroller, a GPS receiver, a voice recorder, a headset, and an LCD. The device retrieves the GPS location that is related by the microcontroller to a pre-stored voice message, which is then communicated to the user through the headset. The LCD is used by the designer in the loading process of voice messages corresponding to different locations. The device successfully identified different buildings within a university campus.
Dambhre and Sakhare [
7] presented a theoretical model and concept of a smart electronic aid for VIPs. The system is intended to perform all measures to assist these people and consists of three main units: a GPS, an obstacle detection, and an artificial vision system. The GPS retrieves the current location and compares it to the user destination. The artificial vision system aims to identify objects that are moving in the vicinity and provide convenient information. It is expected that the artificial vision system will determine whether a detected object represents a threat to the user. The authors provided several key points for the system development.
Nalavade et al. [
8] proposed an obstacle detection and location-tracking system, which comprises two parts, one to detect obstacles using an ultrasonic sensor and alert the user through a buzzer, and the other to track the user location using a GPS module and send SMSs with location information to registered devices via a GSM module.
Wawrzyniak and Korbel [
9] developed a wireless indoor positioning system as part of a solution for independent mobility of VIPs. The system is endowed with a local positioning server, an optional global positioning server, a local database server, and a smartphone to operate in a different wireless network as reference terminal. Specifically, the terminal measures the dominance of the signal relayed from a reference station inside a building and passes the result to the local positioning server. This strategy aims to store information about the area it serves. Then, the stored reference measurements are used to estimate the user location on the basis of the received signal strength indicator, thus deploying one of the first successful indoor positioning systems. In addition, the terminal is responsible for the communication with the global localization server and is used to deliver a novel positioning algorithm.
Amutha and Ponnavaikko [
10] proposed an algorithm for precise location information to be integrated into walking models of healthy and visually impaired people. Moreover, the authors expect to provide a precise location tracking system using the ZigBee specification along with GPS and a Markov chain algorithm for improved accuracy. The system will be used to design a virtual tracking device for the user to find walking paths avoiding obstacles and can be applied outdoors.
Khatri [
11] proposed a system to assist visually impaired and blind individuals. The author considered common limitations such as mobility and reading problems and inability to find objects required for activities of daily living. The system consists of three Android applications and an embedded device, which assists for independent mobility on the basis of three ultrasonic sensors, a switch, a calibration button, and four vibration motors. The Android applications assist in reading, searching for frequently required objects, and moving to destinations.
Gayathri et al. [
12] improved the white cane to help achieve a more confident walking. The system consists of a white cane endowed with two sensors, i.e., a pit sensor to detect irregularities, and a water sensor to sense water along the path. Whenever either of the sensors is activated, the system alerts the user by emitting sound through a buzzer.
Rao et al. [
13] designed a system that assists VIPs to independently navigate indoor environments. The system is composed of a GPS, a microcontroller, an ultrasonic sensor, a ZigBee transceiver, a keypad, and an LCD. Its operation is similar to some of the abovementioned systems, but the GPS receiver produces and interprets messages according to the National Marine Electronics Association Standard to provide localization data anywhere in the world.
Chandana and Hemantha [
14] implemented a device with a transmission and a receiving section. The transmission section is carried by the user and consists of a microcontroller, a GPS receiver, a voice recording/playing module, and a wireless camera. The receiving section is used to monitor the VIP and relays information to the VIP's family and caregivers. The system has an RF receiver with an antenna which continuously acquires the user location in form of a video stream from an RF camera, which also contains user audio. This information is displayed on a computer.
Kumar and Usha [
15] proposed a system to provide object detection and real-time assistance to VIPs based on a GPS, an ultrasonic sensor, and a vibration motor. The authors aimed to develop an electronic travelling aid to help users avoiding obstacles while walking. The system is attached to the white cane, and whenever it detects an object nearby, it triggers a vibration alert. Furthermore, the system allows tracking the user location using GSM and GPS.
Gawari and Bakuli [
16] designed a system based on voice recognition and GPS for safe navigation of VIPs. The user delivers a voice instruction, and the system retrieves direction guidance through audio signals while constantly monitoring the location using a GPS receiver. In addition, object detection allows to avoid obstacles, also by delivering audio messages.
José et al. [
17] developed a wearable system with a board containing a variety of location and tracking technologies such as pedometer, a GPS, RFID tags, an electronic compass, and RF sensors. The system fuses the information from the sensors to improve the estimation of the user location and orientation.
We now discuss the technology and limitations of the abovementioned studies. Overall, most of the aids for VIPs rely on sensors for obstacle detection using different sensing principles and devices. For instance, the authors of [
4,
8,
15] used different sensors to detect obstacles, namely, sonar [
4], infrared [
8], and ultrasonic [
15] sensors, and the same localization (i.e., GPS) and communication (i.e., GSM) technologies. GSM is considered as an affordable solution, but its performance decreases indoors. Regarding sensors, the sonar sensor might be more practical than both the infrared and the ultrasonic sensors in some cases, given its longer detection range up to 4 m and its operation principle, i.e., time of flight rather than the parallax measurement used in infrared sensors. However, sonar sensors are more expensive than both infrared and ultrasonic sensors.
Likewise, the system in [
5] relies on an infrared sensor, whereas that in [
11] relies on an ultrasonic sensor for object detection, given their design considerations, i.e., the ultrasonic sensor provides a longer range than the infrared sensor. In addition, both systems use Android applications to locate the user. Moreover, the system in [
11] has two additional applications, one for reading printed text and the other to search for commonly required objects.
The systems in [
9,
10,
13] integrate algorithms to improve the location estimation of the visually impaired user. Notably, the authors of [
9] used the received signal strength indicator in a short-range radio communication network to achieve indoor positioning.
In [
6,
7,
12,
16] the authors used GPS to determine the best path from origin to destination, and the system in [
12] has two sensors, one to detect obstacles and the other to detect water along the user path. In [
14], the system delivers GPS data as a continuous video stream that includes audio acquired from the device. The system in [
17] uses an artificial vision system to identify individual moving objects, allows both indoor and outdoor navigation, and integrates different technologies to improve the location estimation.
Overall, our proposed system has the abovementioned localization and object detection features, but it also includes an alert system to detect possible accidents and ask for assistance when needed. Moreover, the proposed system allows constant communication between the user and his family and caregivers, with embedded location tracking.
5. Discussion
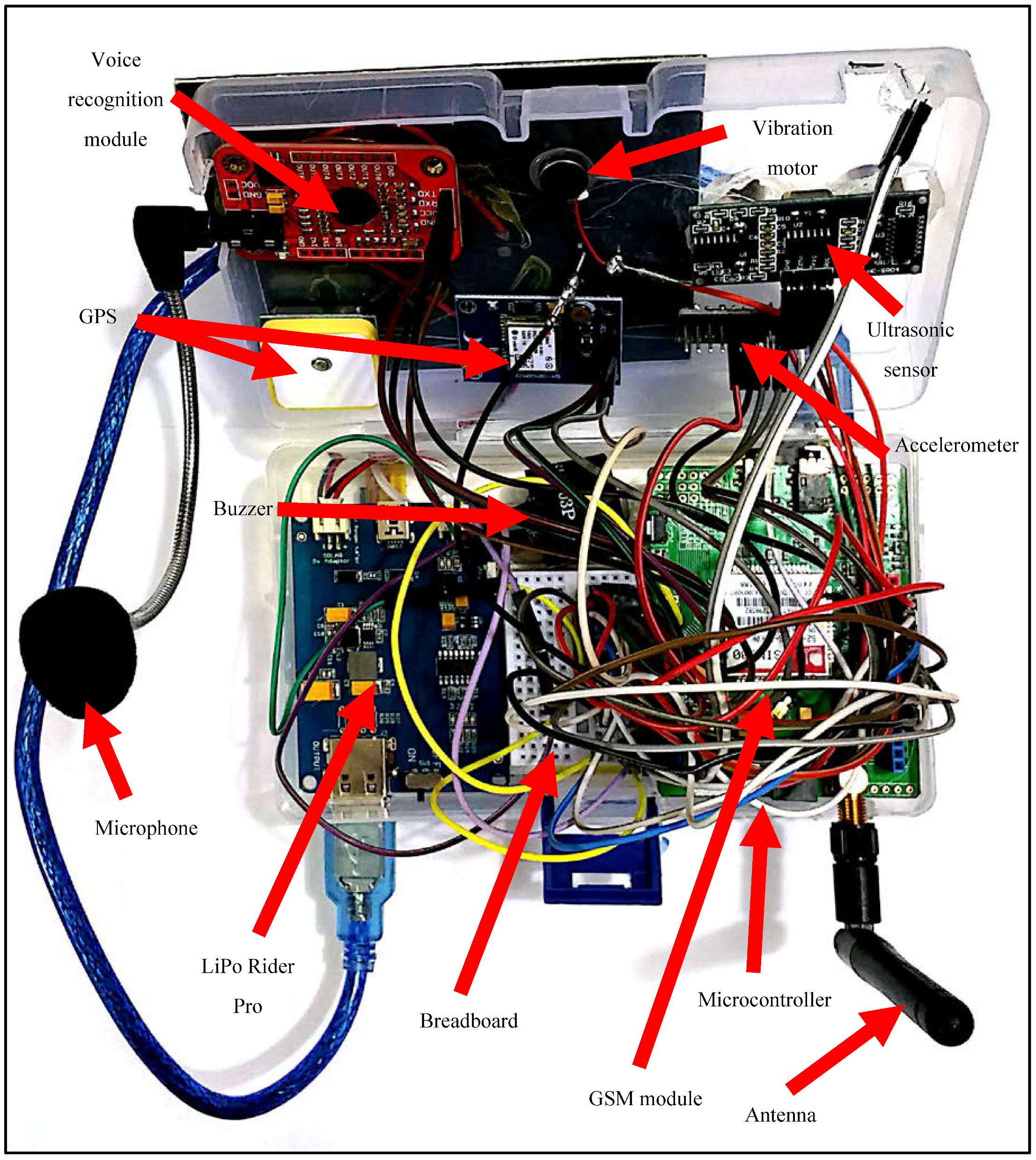
Before fabricating the system, we tested and verified the sensors against calibrated instruments. Then, from the implemented system and its functionality tests, we verified that every sensing operation occurred flawlessly, the alarms were promptly and correctly activated, the SMS alarms were transmitted to the registered phone in real time, and the system location was highly accurate.
During the system development, we found various challenges and limitations. The most prominent was the unavailability and difficulty to obtain the required components to implement the system prototype, given the current situation in Iraq. Likewise, terrorist activity limits the access to electronic components, and tight regulations are applied, thus increasing the costs of the system and limiting the possibility to make it available to the public. In future works, we plan to include other sensors into the system to increase its capabilities with functions such as detection of fire, water, holes, and stairs, as well as objects at the head level.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}







