A Model of Gravity Vector Measurement Noise for Estimating Accelerometer Bias in Gravity Disturbance Compensation


Abstract
:1. Introduction
2. Horizontal Gravity Disturbance and Spherical Harmonic Model
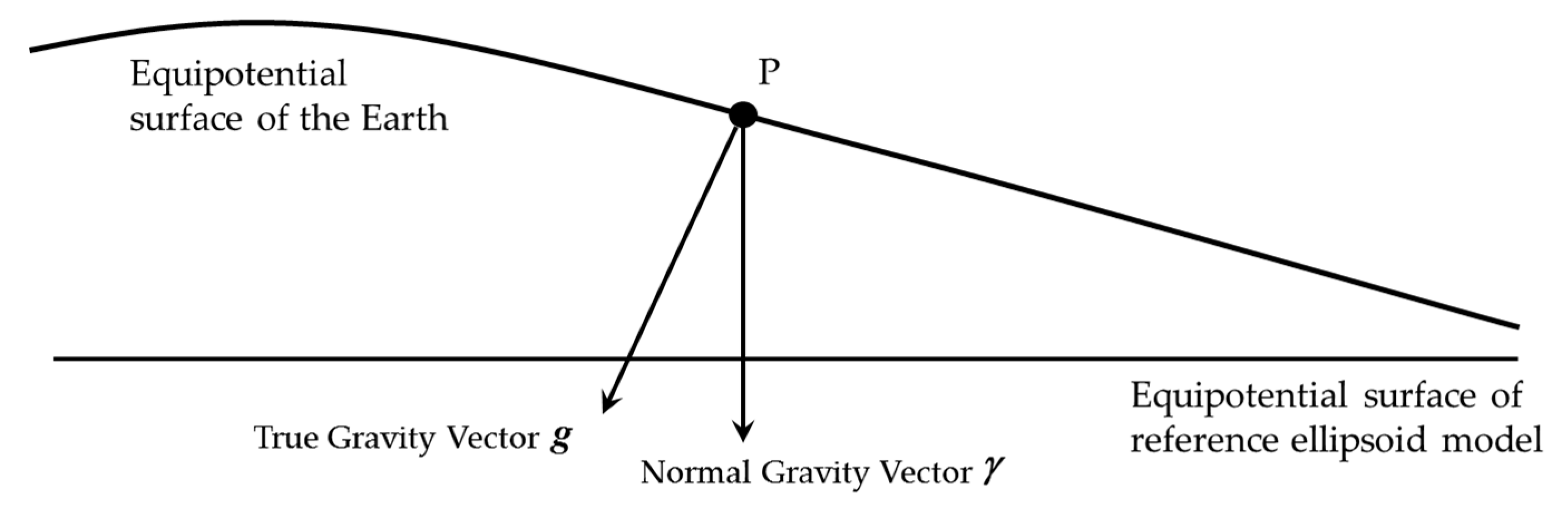
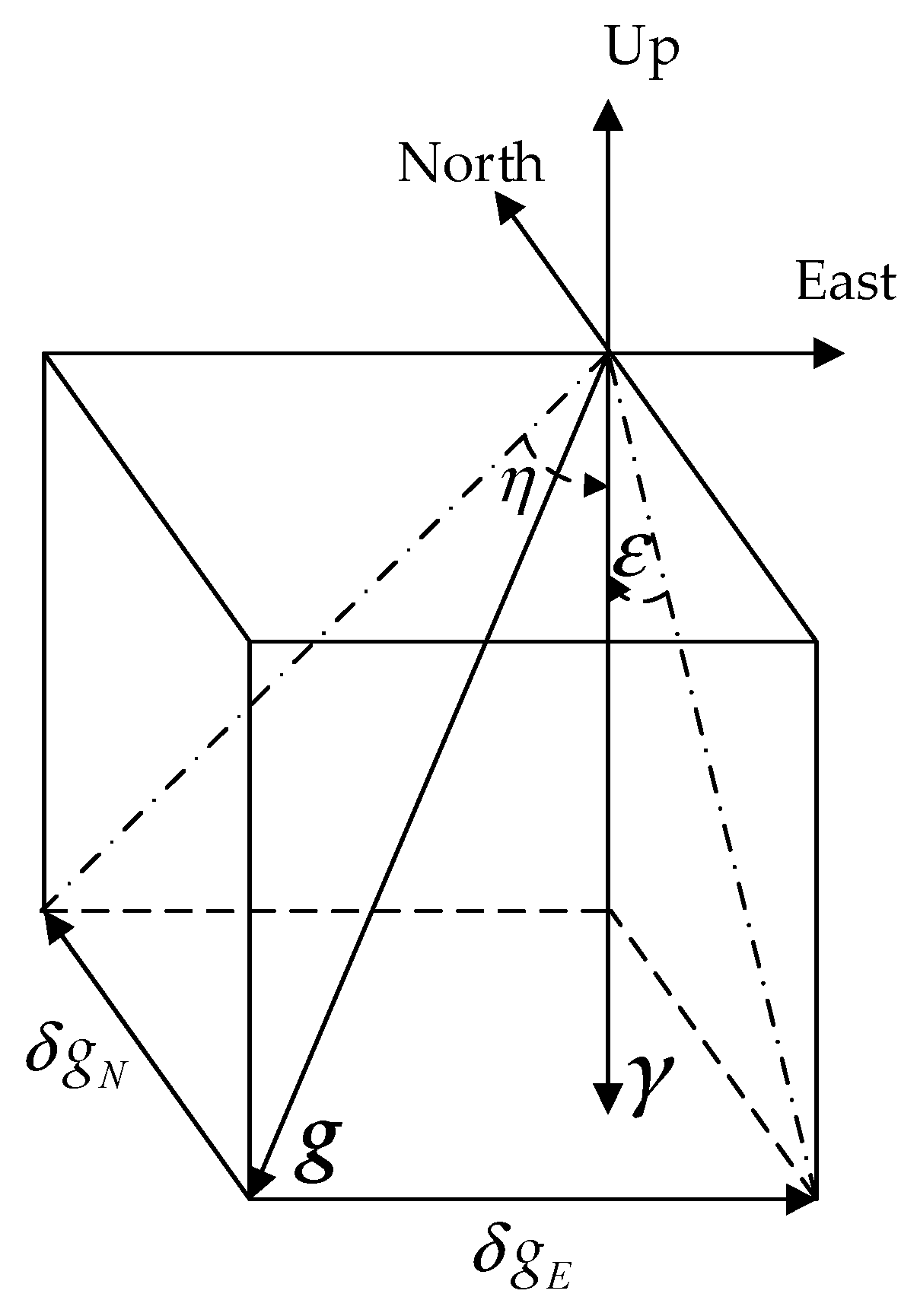
2.1. Definition of Horizontal Gravity Disturbance
2.2. Calculation of Horizontal Gravity Disturbance Based on SHM
3. The Effect of Accelerometer Bias on Horizontal Gravity Disturbance Compensation
3.1. Reference Coordinate Frames
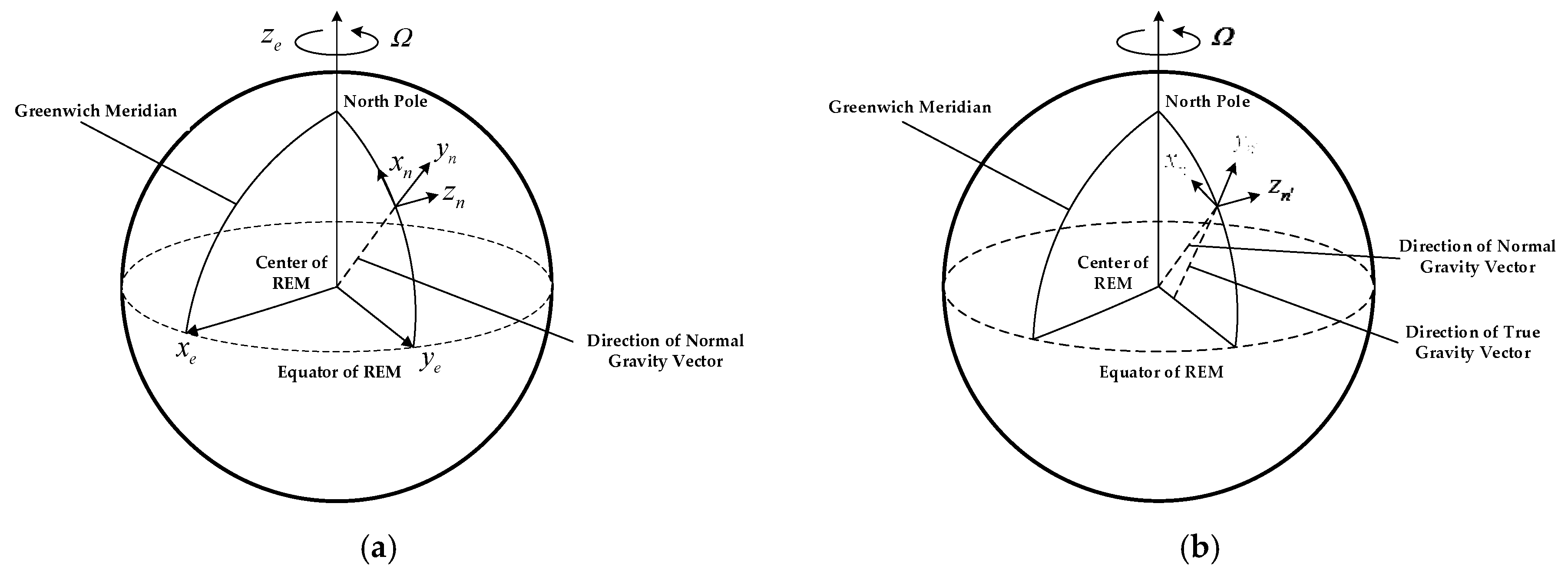
3.1.1. Earth-Centered-Earth-Fixed Frame e
3.1.2. Navigation Coordinate Frame with North-Up-East Definition n
3.1.3. Body Coordinate Frame with Forward-Upward-Right b
3.1.4. Navigation Coordinate Frame with True Vertical n’
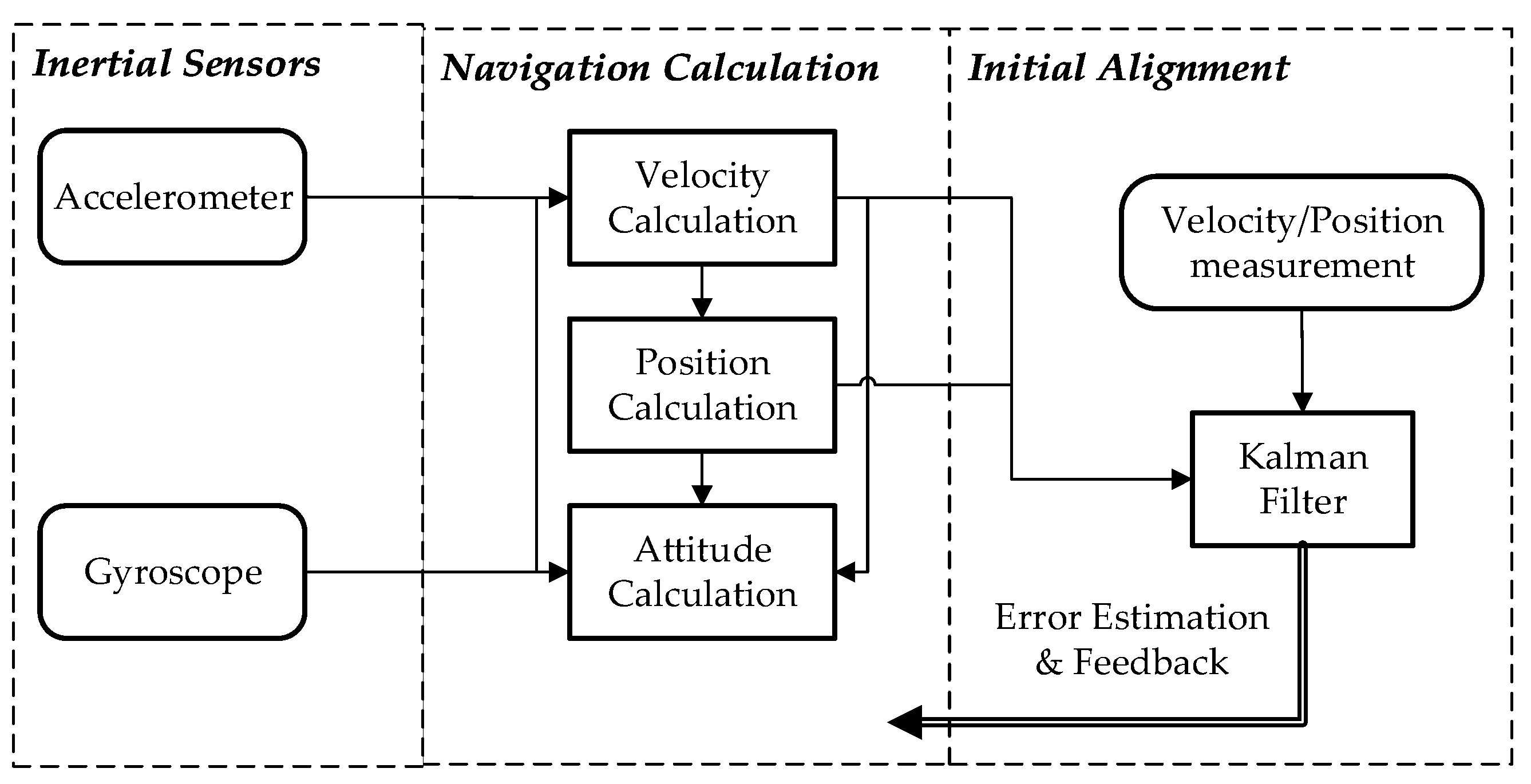
3.2. Mathmatical Formulation of INS
3.3. Effect of Acceleromter Bias on Compensation
4. Model of Gravity Vector Measurement Noise
4.1. The Measurement Noise of Horizontal Gravity Disturbance
- (1)
- In the plane ;
- (2)
- Pass through the origin of the two coordinate frames;
- (3)
- Be orthogonal to the plane ;
- (4)
- is unit vector;
4.2. Parameters of the Model of Measurement Noise
4.3. Estimation Model of the Accelerate Bias
5. Simulation Results
5.1. Estimation Methods of Accelerometer Bias
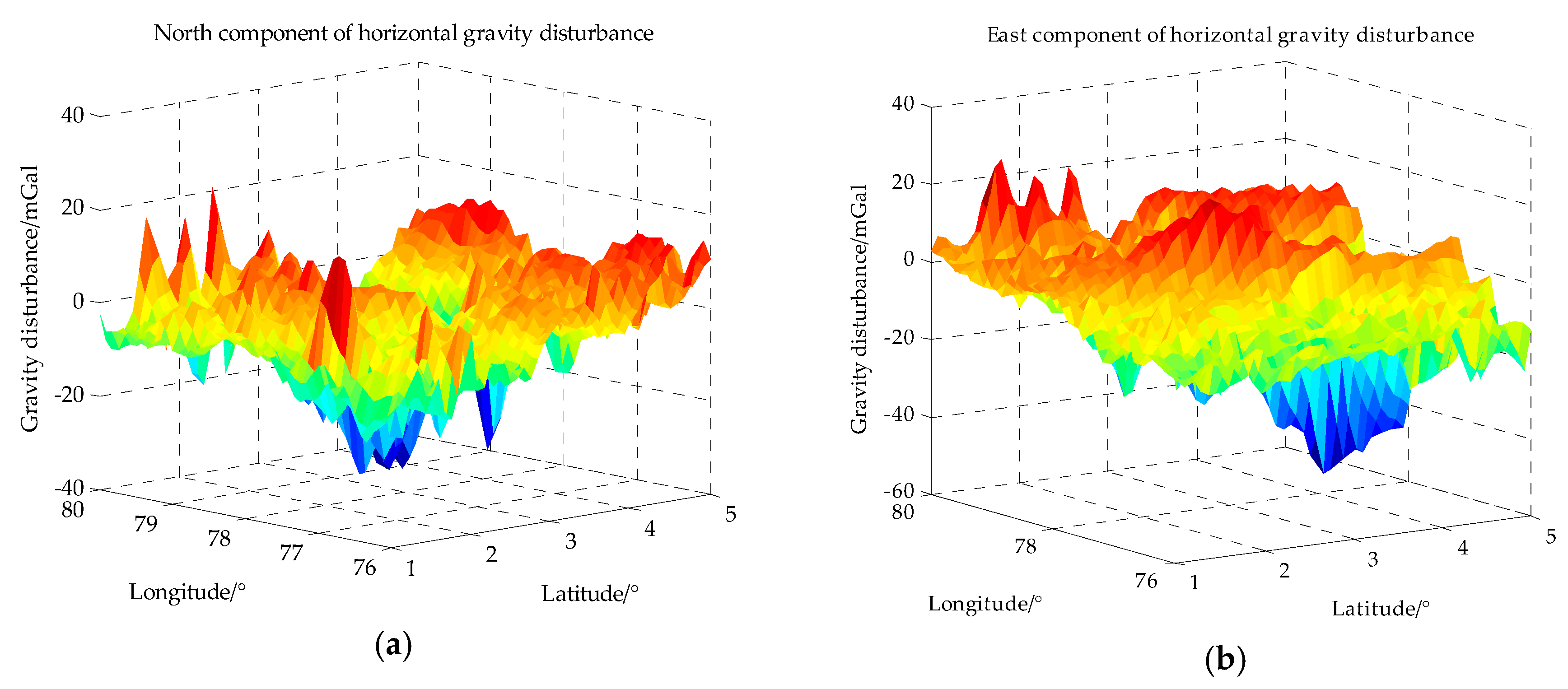
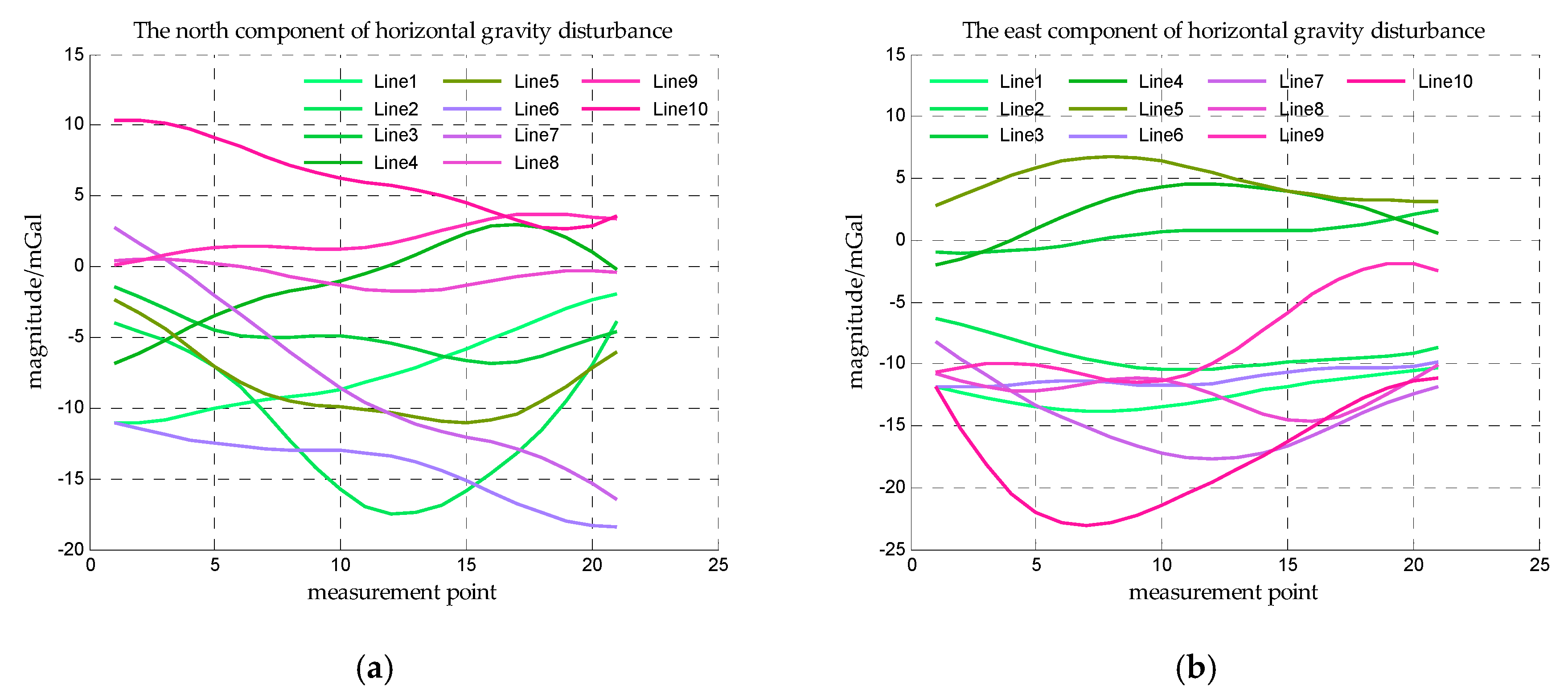
5.2. Simulation of Horizontal Gravity Disturbance
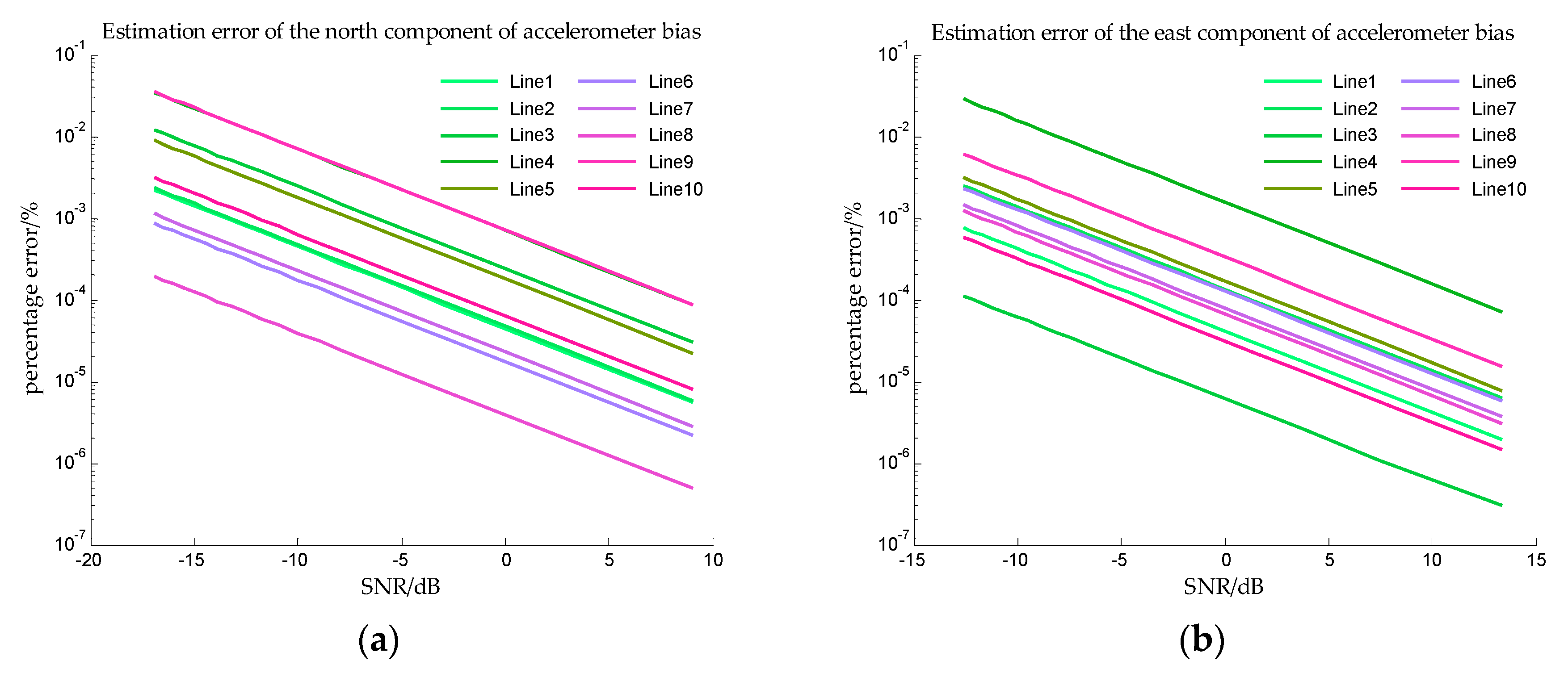
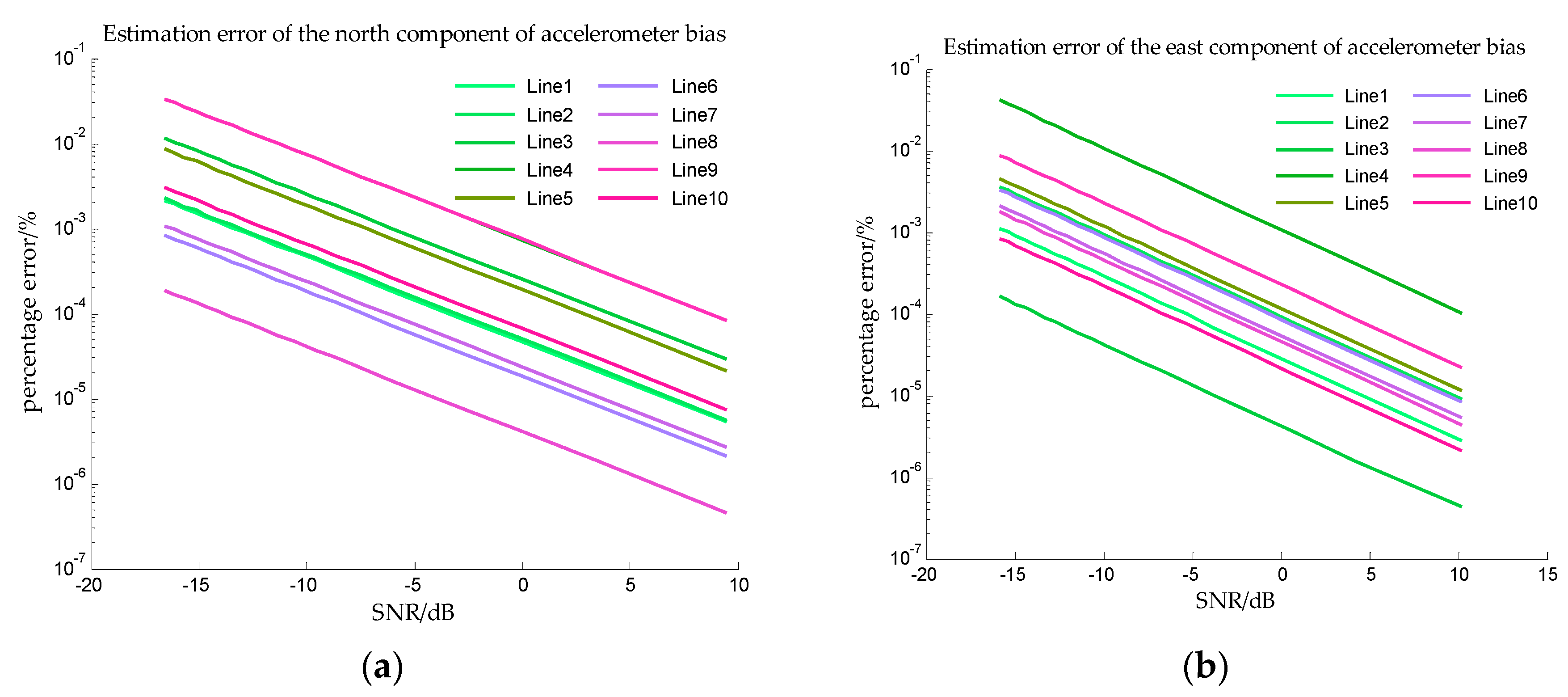
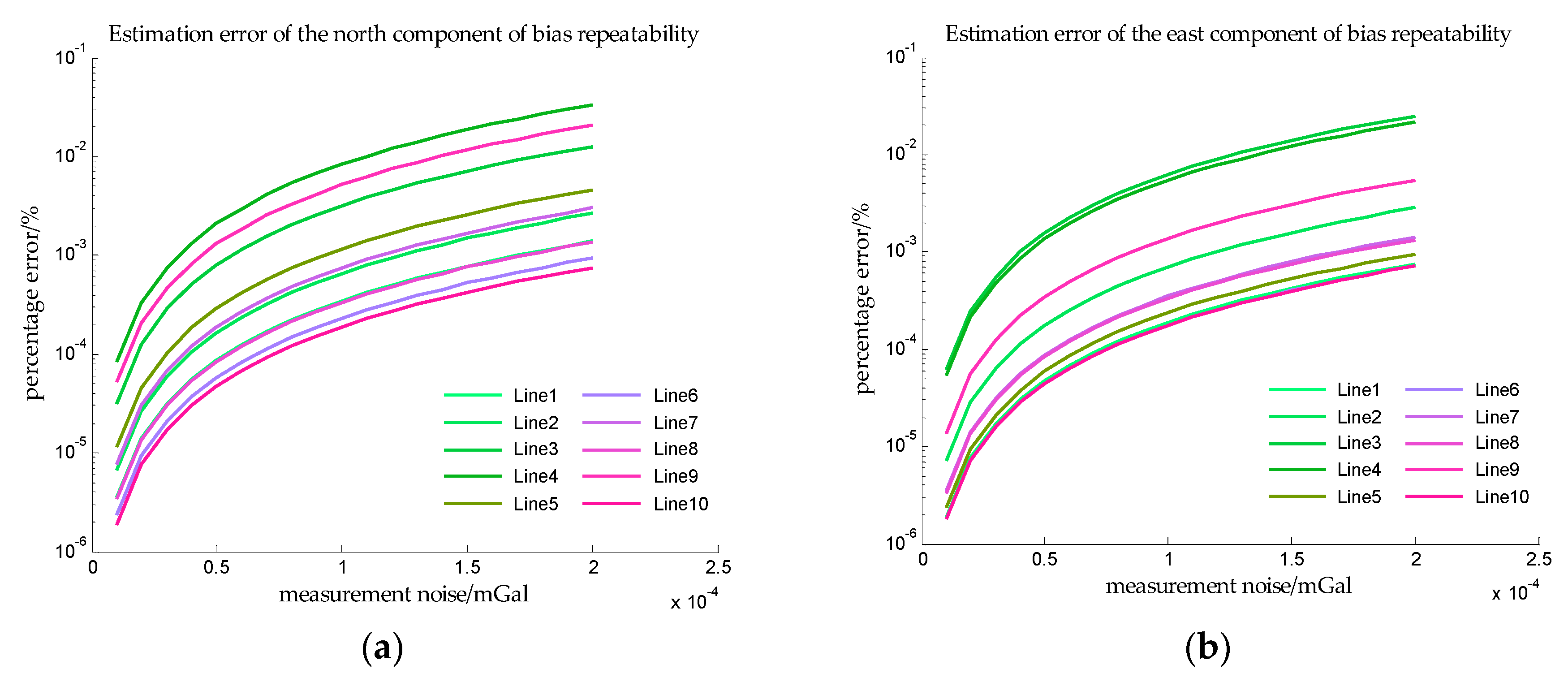
5.3. Simulation Results
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Britting, K.R. Inertial Navigation Systems Analysis; Artech House: Norwood, MA, USA, 2010. [Google Scholar]
- Titterton, D.; Weston, J.L. Strapdown Inertial Navigation Technology; Institution of Engineering and Technology: Stevenage, UK, 2004. [Google Scholar]
- Kwon, J.H.; Jekeli, C. Gravity requirements for compensation of ultra-precise inertial navigation. J. Navig. 2005, 58, 479–492. [Google Scholar] [CrossRef]
- Harriman, D.W.; Van Dam, C.C.P.G. Gravity-induced errors in airborne inertial navigation. J. Guid. Control Dyn. 1986, 9, 419–426. [Google Scholar]
- Jing, W.; Gongliu, Y.; Xiangyun, L.; Xiao, Z. Application of the spherical harmonic gravity model in high precision inertial navigation systems. Meas. Sci. Technol. 2016, 27, 95103. [Google Scholar] [CrossRef]
- Xiao, Z.; Gongliu, Y.; Jing, W.; Jing, L. An improved gravity compensation method for high-precision free-INS based on MEC–BP–AdaBoost. Meas. Sci. Technol. 2016, 27, 125007. [Google Scholar] [CrossRef]
- Dai, D.; Wang, X.; Zhan, D.; Huang, Z.; Xiong, H. An improved method for gravity disturbances compensation in INS/GPS integrated navigation. In Proceedings of the 12th International Conference on Signal Processing (ICSP), Hangzhou, China, 19–23 October 2014; pp. 148–153. [Google Scholar]
- Cong, L.; Zhao, Z.; Yang, X. On gravity disturbance compensation technology of high-precision SINS based on B-spline method. In Proceedings of the 2014 IEEE Chinese Guidance, Navigation and Control Conference, Yantai, China, 8–10 August 2014; pp. 16–18. [Google Scholar]
- Hao, W.; Xuan, X.; Zhi-Hong, D.; Meng-Yin, F. The influence of gravity disturbance on high-precision long-time INS and its compensation method. In Proceedings of the Fourth International Conference on Instrumentation and Measurement, Computer, Communication and Control, Harbin, China, 18–20 September 2014; pp. 104–108. [Google Scholar]
- Fang, J.; Chen, L.; Yao, J. An accurate gravity compensation method for high-precision airborne POS. IEEE Trans. Geosci. Remote Sens. 2014, 52, 4564–4573. [Google Scholar] [CrossRef]
- Hofmann-Wellenhof, B.; Moritz, H. Physical Geodesy; Springer Vienna: Vienna, Austria, 2009. [Google Scholar]
- Kayton, M. Fundamental limitations on inertial measurements. In Guidance and Control; Farrior, J.S., Ed.; Academic Press: Cambridge, MA, USA, 1962; Volume 8, pp. 367–394. [Google Scholar]
- Gelb, A.; Levine, S.A. Effect of deflections of the vertical on the performance of a terrestrial inertial navigation system. J. Spacecr. Rockets 1969, 6, 978–984. [Google Scholar] [CrossRef]
- Jordan, S.K. Self-consistent statistical models for the gravity anomaly, vertical deflections, and undulation of the geoid. J. Geophys. Res. 1972, 77, 3660–3670. [Google Scholar] [CrossRef]
- Moryl, J.; Rice, H.; Shinners, S. The universal gravity module for enhanced submarine navigation. In Proceedings of the IEEE 1998 Position Location and Navigation Symposium, Palm Springs, CA, USA, 20–23 April 1998; pp. 324–331. [Google Scholar]
- Wang, J.; Yang, G.; Li, J.; Zhou, X. An online gravity modeling method applied for high precision free-INS. Sensors 2016, 16, 1541. [Google Scholar] [CrossRef] [PubMed]
- Wu, R.; Wu, Q.; Han, F.; Liu, T.; Hu, P.; Li, H. Gravity compensation using EGM2008 for high-precision long-term inertial navigation systems. Sensors 2016, 16, 2177. [Google Scholar] [CrossRef] [PubMed]
- Tie, J.; Wu, M.; Cao, J.; Lian, J.; Cai, S. The impact of initial alignment on compensation for deflection of vertical in inertial navigation. In Proceedings of the IEEE 8th International Conference on Cybernetics and Intelligent Systems, Robotics Automation and Mechatronics, Ningbo, China, 19–21 November 2017. [Google Scholar]
- Gilster, G. High accuracy performance capabilities of the military standard ring laser gyro inertial navigation unit. In Proceedings of the Position Location and Navigation Symposium, Las Vegas, NV, USA, 11–15 April 1994; pp. 464–473. [Google Scholar]
- Hanson, P.O. Correction for deflections of the vertical at the runup site. In Proceedings of the IEEE Position Location and Navigation Symposium, Orlando, FL, USA, USA, 29 November–2 December 1988; pp. 288–296. [Google Scholar]
- Huang, Y.; Zhang, K.; Wu, M.; Ma, H. Estimation of accelerometer bias of airborne gravity while aircraft sliding. In Proceedings of the International Conference on Measuring Technology and Mechatronics Automation, Changsha, China, 13–14 March 2010; pp. 153–157. [Google Scholar]
- Sinpyo, H.; Man Hyung, L.; Ho-Hwan, C.; Sun-Hong, K.; Speyer, J.L. Observability of error states in GPS/INS integration. IEEE Trans. Veh. Technol. 2005, 54, 731–743. [Google Scholar]
- Goshen-Meskin, D.; Bar-Itzhack, I.Y. Observability analysis of piece-wise constant systems with application to inertial navigation. In Proceedings of the 29th IEEE Conference on Decision and Control, Honolulu, HI, USA, 5–7 December 1990; Volume 822, pp. 821–826. [Google Scholar]
- Shaw, L.; Paul, I.; Henrikson, P. Statistical models for the vertical deflection from gravity anomaly models. J. Geophys. Res. 1969, 74, 4259–4265. [Google Scholar] [CrossRef]
- Cai, S.K.; Tie, J.B.; Zhang, K.D.; Cao, J.L.; Wu, M.P. Marine gravimetry using the strapdown gravimeter SGA-WZ. Mar. Geophys. Res. 2017, 38, 325–340. [Google Scholar] [CrossRef]
- Cai, S.K.; Zhang, K.D.; Wu, M.P. Improving airborne strapdown vector gravimetry using stabilized horizontal components. J. Appl. Geophys. 2013, 98, 79–89. [Google Scholar] [CrossRef]
- Featherstone, W. The Use and Abuse of Vertical Deflections. In Proceedings of the 40th Australian Surveyors Congress, Fremantle, Australia, 1–6 November 1999; pp. 85–97. [Google Scholar]
- Vanícek, P.K.; Krakiwsky, E.J. Geodesy: The Concepts; Elsevier Science: Amsterdam, The Netherlands, 1986. [Google Scholar]
- Bomford, G. Geodesy, 4th ed.; Clarendon Press: Oxford, UK, 1980. [Google Scholar]
- Cai, S.; Zhang, K.; Wu, M.; Huang, Y.; Yang, Y. An iterative method for the accurate determination of airborne gravity horizontal components using strapdown inertial navigation system/global navigation satellite system. Geophysics 2015, 80, G119–G129. [Google Scholar] [CrossRef]
- Cai, S.; Wu, M.; Zhang, K.; Cao, J.; Tuo, Z.; Huang, Y. The first airborne scalar gravimetry system based on SINS/DGPS in China. China Earth Sci. 2013, 56, 2198–2208. [Google Scholar] [CrossRef]
- Bruton, A.M. Improving the Accuracy and Resolution of SINS/DGPS Airborne Gravimetry; University of Calgary: Calgary, AB, Canada, 2000. [Google Scholar]
- Wagner, J.F.; Wieneke, T. Integrating Satellite and Inertial Navigation–Conventional and New Fusion Approaches. Control Eng. Pract. 2003, 11, 543–550. [Google Scholar] [CrossRef]
- Groves, P.D. Principles of GNSS, Inertial, and Multisensor Integrated Navigation Systems, 2nd ed.; Artech House: Norwood, MA, USA, 2013. [Google Scholar]
- Wagner, J. GNSS/INS Integration: Still an Attractive Candidate for Automatic Landing Systems. GPS Solut. 2005, 9, 179–193. [Google Scholar] [CrossRef]





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
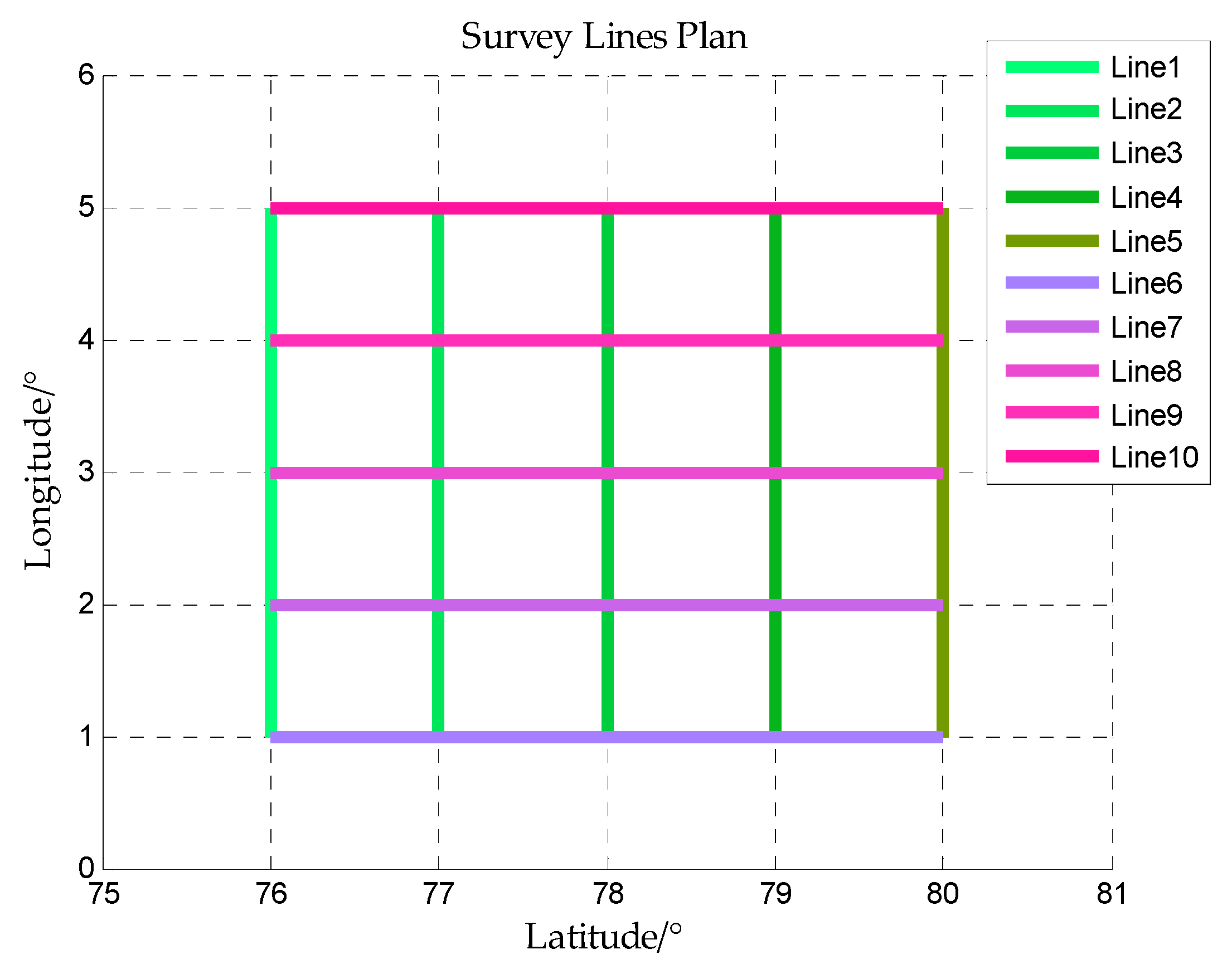
| Line No. | Latitude Range | Longitude Range | Grid Spacing |
|---|---|---|---|
| Line 1 | 1° N~5° N | 76° E | 5 n mile |
| Line 2 | 1° N~5° N | 77° E | 5 n mile |
| Line 3 | 1° N~5° N | 78° E | 5 n mile |
| Line 4 | 1° N~5° | 79° E | 5 n mile |
| Line 5 | 1° N~5° N | 80° E | 5 n mile |
| Line 6 | 1° N | 76° E~80° E | 5 n mile |
| Line 7 | 2° N | 76° E~80° E | 5 n mile |
| Line 8 | 3° N | 76° E~80° E | 5 n mile |
| Line 9 | 4° N | 76° E~80° E | 5 n mile |
| Line 10 | 5° N | 76° E~80° E | 5 n mile |
| Line No. | Mean Value/mGal | Median/mGal | ||
|---|---|---|---|---|
| North Component | East Component | North Component | East Component | |
| 1 | −1.21 | −10.36 | −1.55 | −10.57 |
| 2 | −1.61 | −6.87 | −2.42 | −6.64 |
| 3 | −2.61 | −3.20 | −2.97 | 1.25 |
| 4 | −7.07 | −6.27 | −3.43 | −3.23 |
| 5 | −5.50 | 2.58 | −8.65 | 3.32 |
| 6 | −6.42 | −3.62 | −5.70 | −2.17 |
| 7 | −2.24 | −2.62 | −2.01 | −3.21 |
| 8 | −4.96 | −2.58 | −4.44 | −3.10 |
| 9 | −3.61 | −5.79 | −2.92 | −3.50 |
| 10 | 6.84 | −7.92 | 8.35 | −6.84 |
| Mean value of all survey lines | Median of all survey lines | |||
| −2.84 | −4.67 | −2.97 | −3.23 | |
| Simulation No. | Description |
|---|---|
| Simulation I | Only bias repeatability is considered and is equal to the mean value of all the survey lines |
| Simulation II | Only bias repeatability is considered and is equal to the median value of all the survey lines |
| Simulation III | Bias repeatability and bias instability are both considered, where bias repeatability is equal to the mean value of all the survey lines and drift rate is 1.31 mGal/day |
| Line No. | Latitude Range | Longitude Range | Spacing |
|---|---|---|---|
| Line 1 | 1° N~1°20′ N | 76° E | 1 n mile |
| Line 2 | 1° N~1°20′ N | 77° E | 1 n mile |
| Line 3 | 1° N~1°20′ N | 78° E | 1 n mile |
| Line 4 | 1° N~1°20′ N | 79° E | 1 n mile |
| Line 5 | 1° N~1°20′ N | 80° E | 1 n mile |
| Line 6 | 1° N | 76° E~76°20′ E | 1 n mile |
| Line 7 | 2° N | 76° E~76°20′ E | 1 n mile |
| Line 8 | 3° N | 76° E~76°20′ E | 1 n mile |
| Line 9 | 4° N | 76° E~76°20′ E | 1 n mile |
| Line 10 | 5° N | 76° E~76°20′ E | 1 n mile |
| Simulation No. | Description |
|---|---|
| Simulation IV | On the short survey lines, only bias repeatability is considered and is equal to the mean value of all the survey lines |
| Simulation V | On the short survey lines, only bias repeatability is considered and is equal to the median value of all the survey lines |
| Simulation VI | On the short survey lines, bias repeatability and bias instability are both considered, where bias repeatability is equal to the mean value of all the survey lines and drift rate is 1.31 mGal/day |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tie, J.; Cao, J.; Chang, L.; Cai, S.; Wu, M.; Lian, J. A Model of Gravity Vector Measurement Noise for Estimating Accelerometer Bias in Gravity Disturbance Compensation. Sensors 2018, 18, 883. https://doi.org/10.3390/s18030883
Tie J, Cao J, Chang L, Cai S, Wu M, Lian J. A Model of Gravity Vector Measurement Noise for Estimating Accelerometer Bias in Gravity Disturbance Compensation. Sensors. 2018; 18(3):883. https://doi.org/10.3390/s18030883
Chicago/Turabian StyleTie, Junbo, Juliang Cao, Lubing Chang, Shaokun Cai, Meiping Wu, and Junxiang Lian. 2018. "A Model of Gravity Vector Measurement Noise for Estimating Accelerometer Bias in Gravity Disturbance Compensation" Sensors 18, no. 3: 883. https://doi.org/10.3390/s18030883
APA StyleTie, J., Cao, J., Chang, L., Cai, S., Wu, M., & Lian, J. (2018). A Model of Gravity Vector Measurement Noise for Estimating Accelerometer Bias in Gravity Disturbance Compensation. Sensors, 18(3), 883. https://doi.org/10.3390/s18030883