In-Field Validation of an Inertial Sensor-Based System for Movement Analysis and Classification in Ski Mountaineering


Abstract
:1. Introduction
- -
- Extend, and make available in real-time to coaches and athletes, SkiMo technique parameters to include cycle detection, cadence, glide percentage, stride distance, stride duration, stride length, slope gradient, and power.
- -
- Develop a new algorithm to detect and classify SkiMo transitions between different types of locomotion during the activity.
2. Materials and Methods
2.1. Experimental Validation Protocols in the Snow-Field
2.1.1. Parameters Validation Protocol
2.1.2. Transitions Validation Protocol
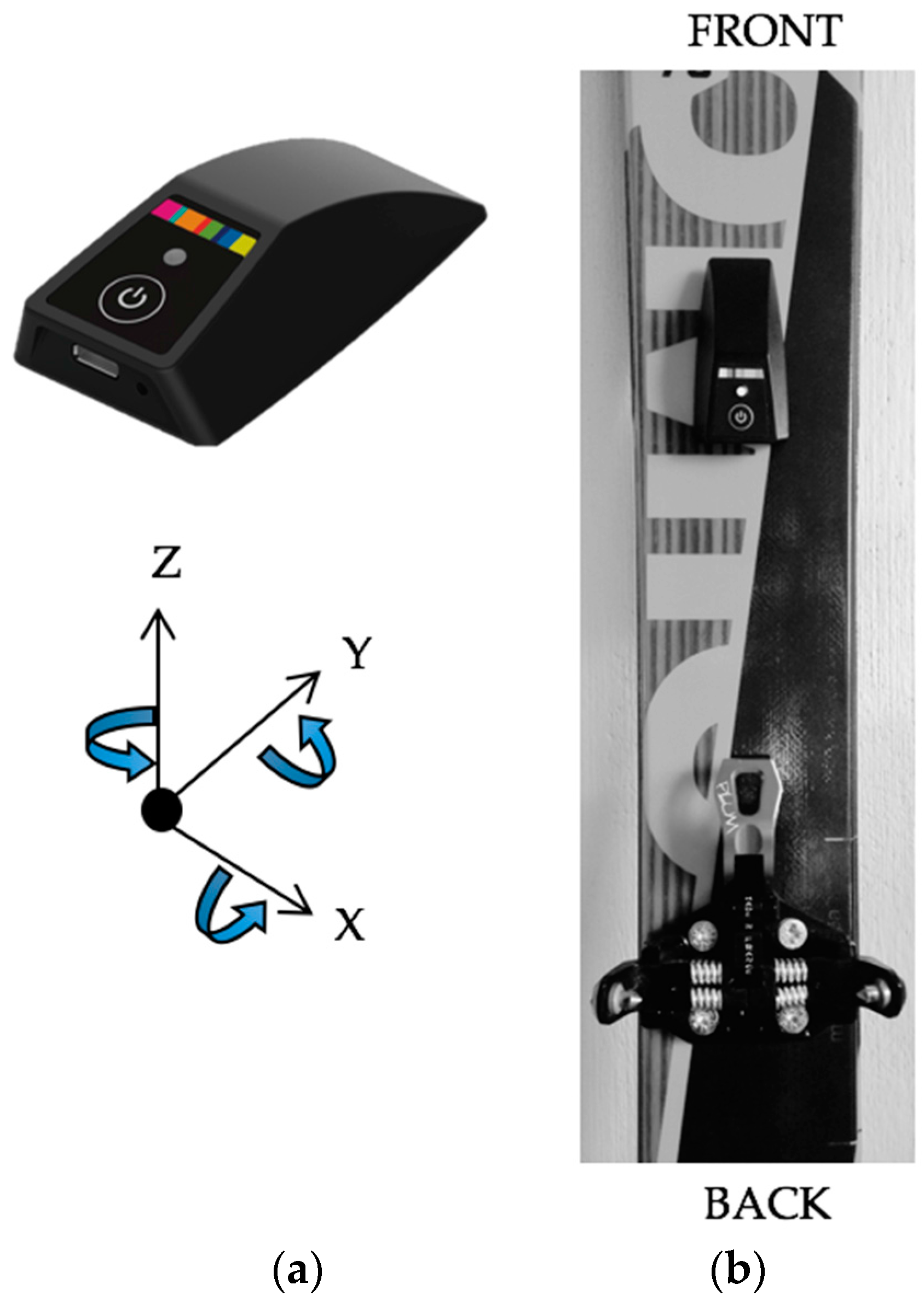
2.2. Ski-Mounted IMU Device
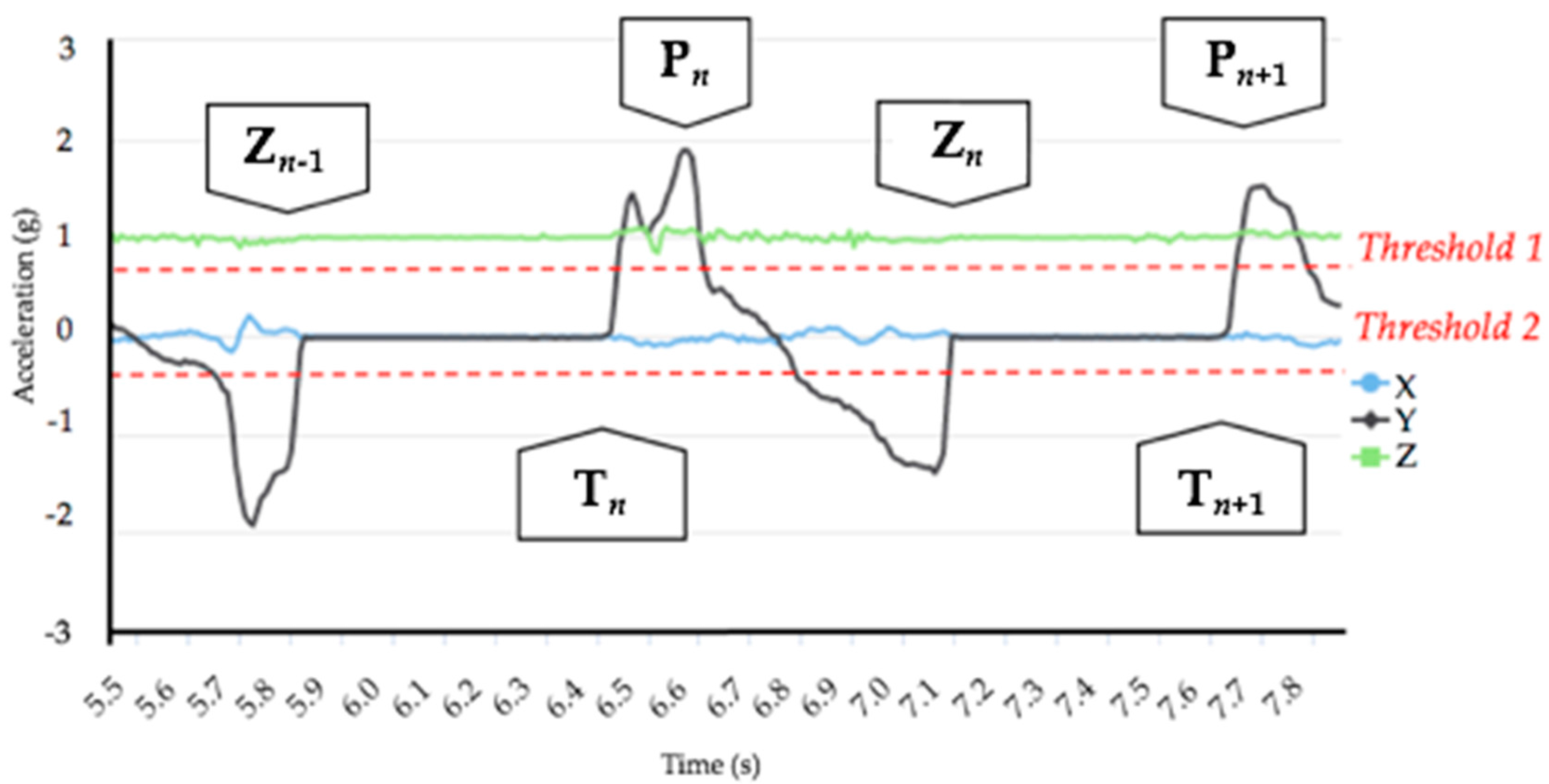
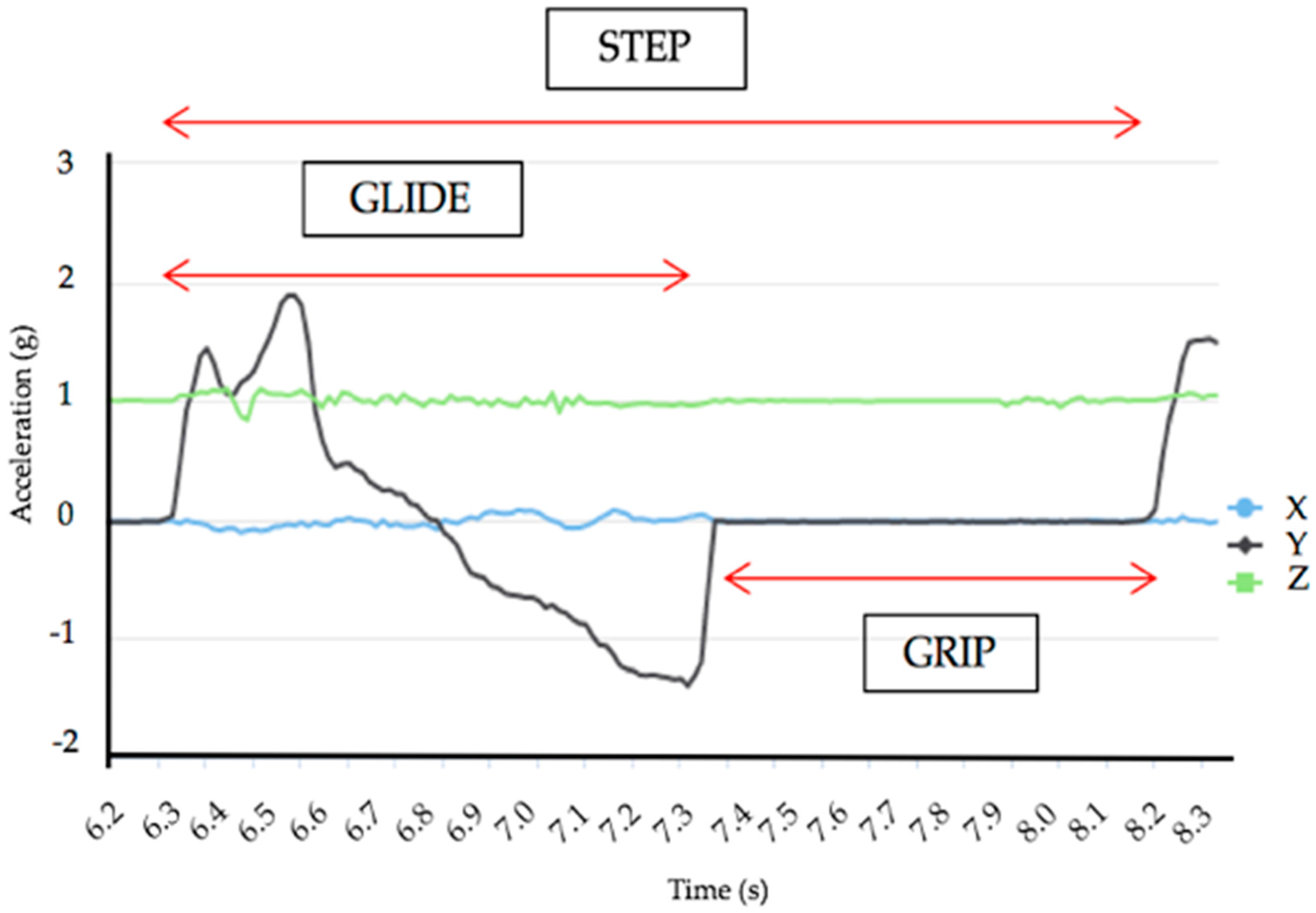
2.3. Algorithm and Reference Parameters Estimation
- Strides (ST)
- Slope gradient (SG) in degrees
- Stride duration (SD) in seconds
- Cadence (CD) in strides/min
- Stride length (SL) in cm
- Glide percentage (GP) in %
- Power (PW) in Watts
- Distance from strides
2.4. Statistical Analysis
3. Results
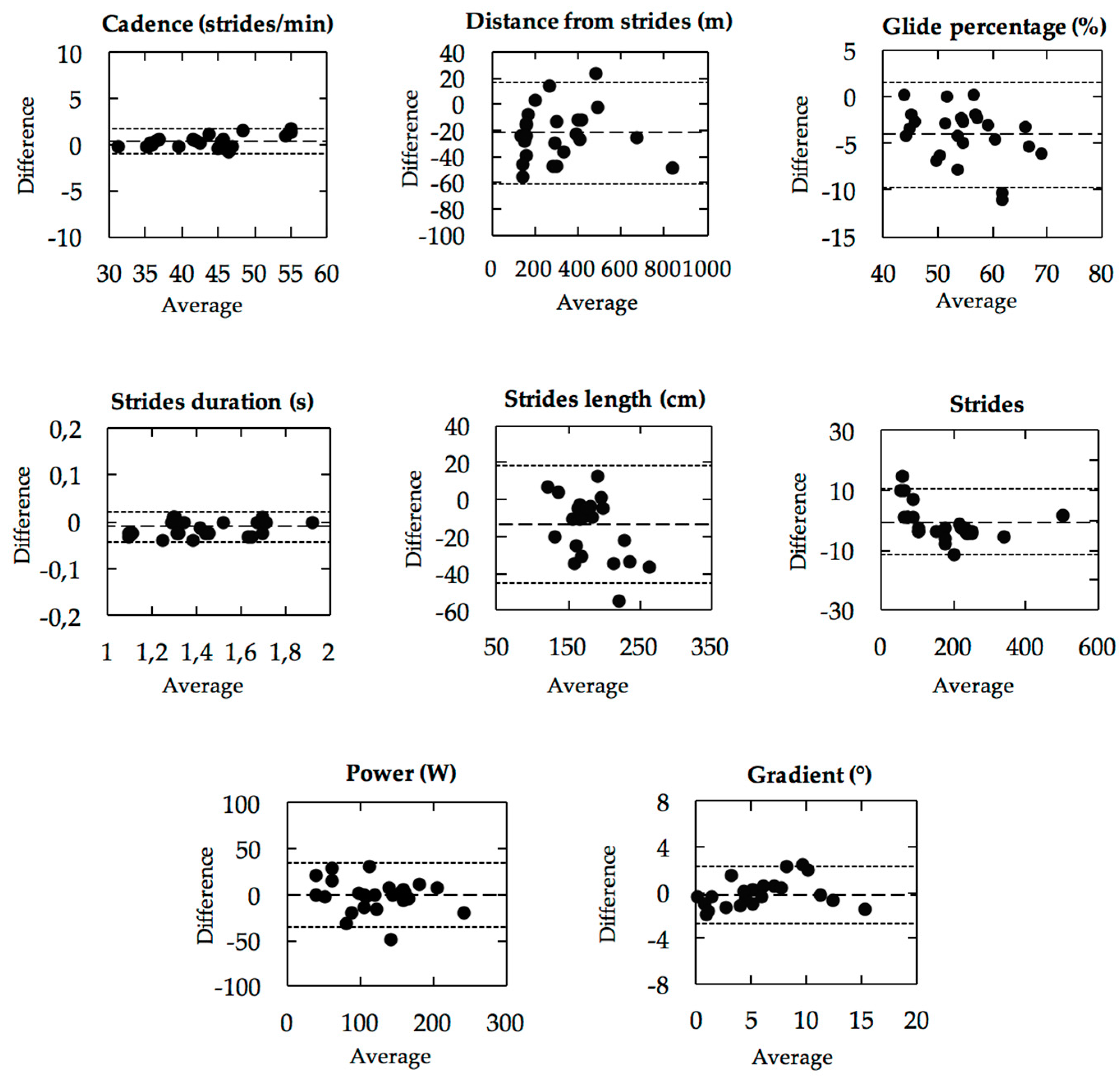
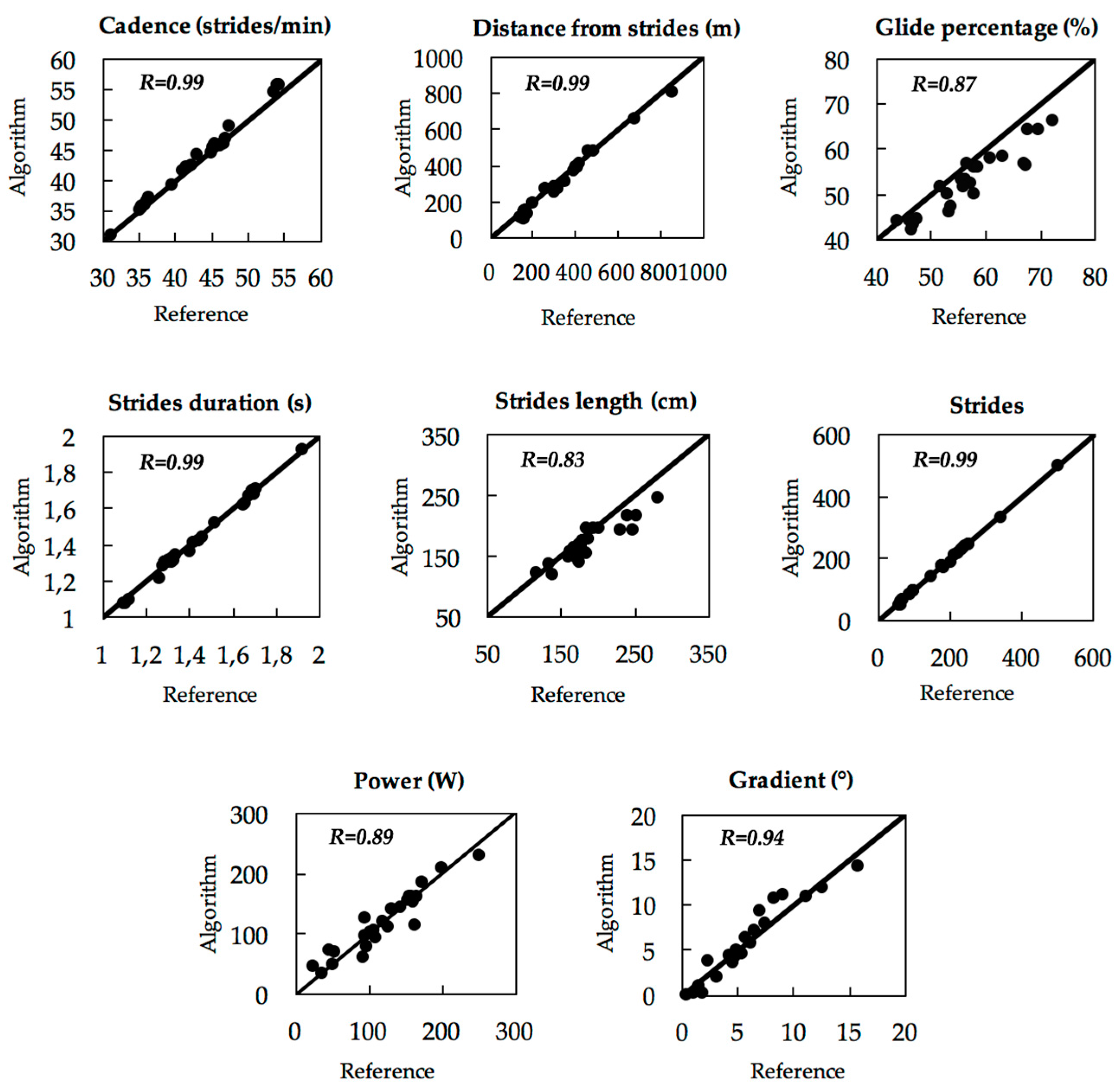
3.1. Parameter Estimation
3.2. Transitions
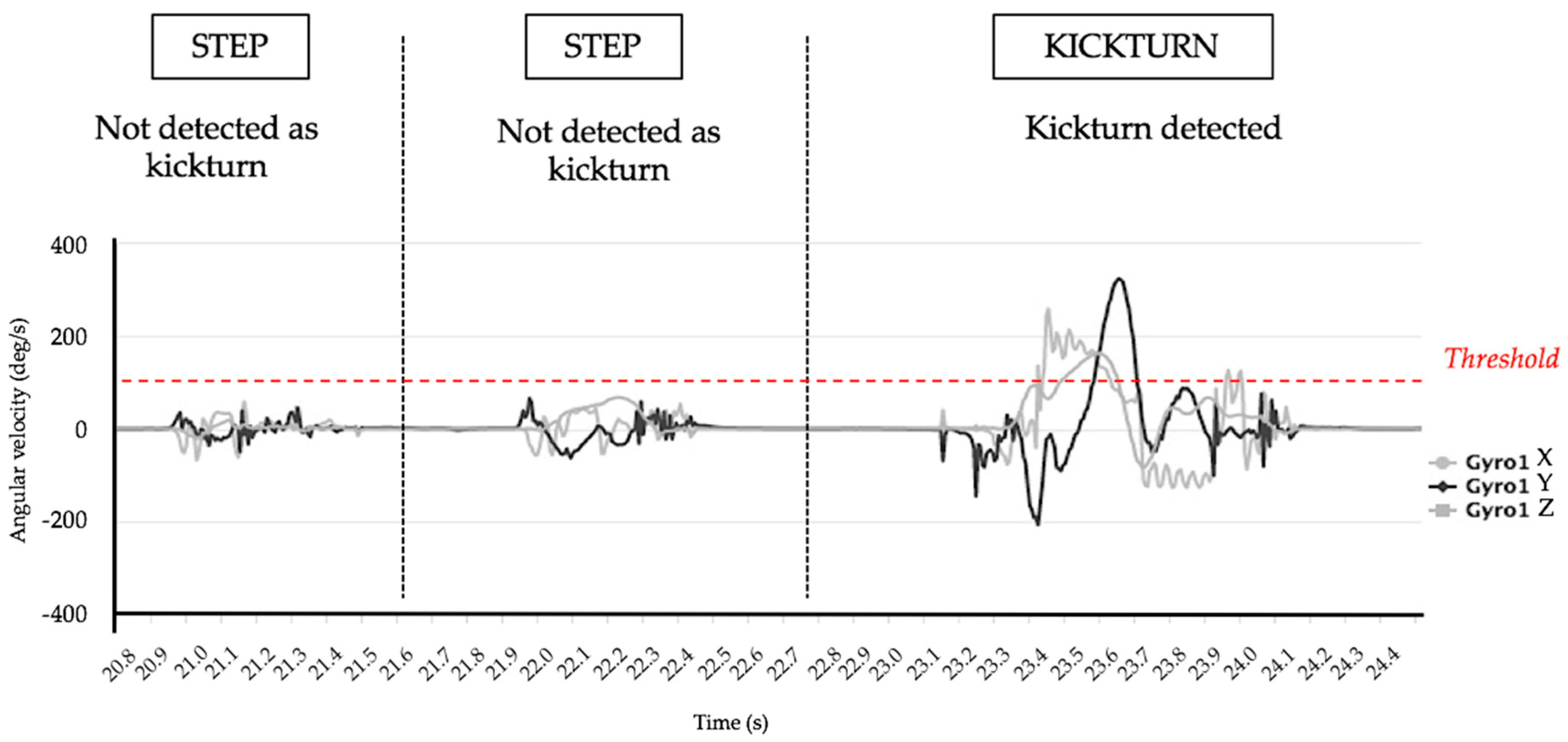
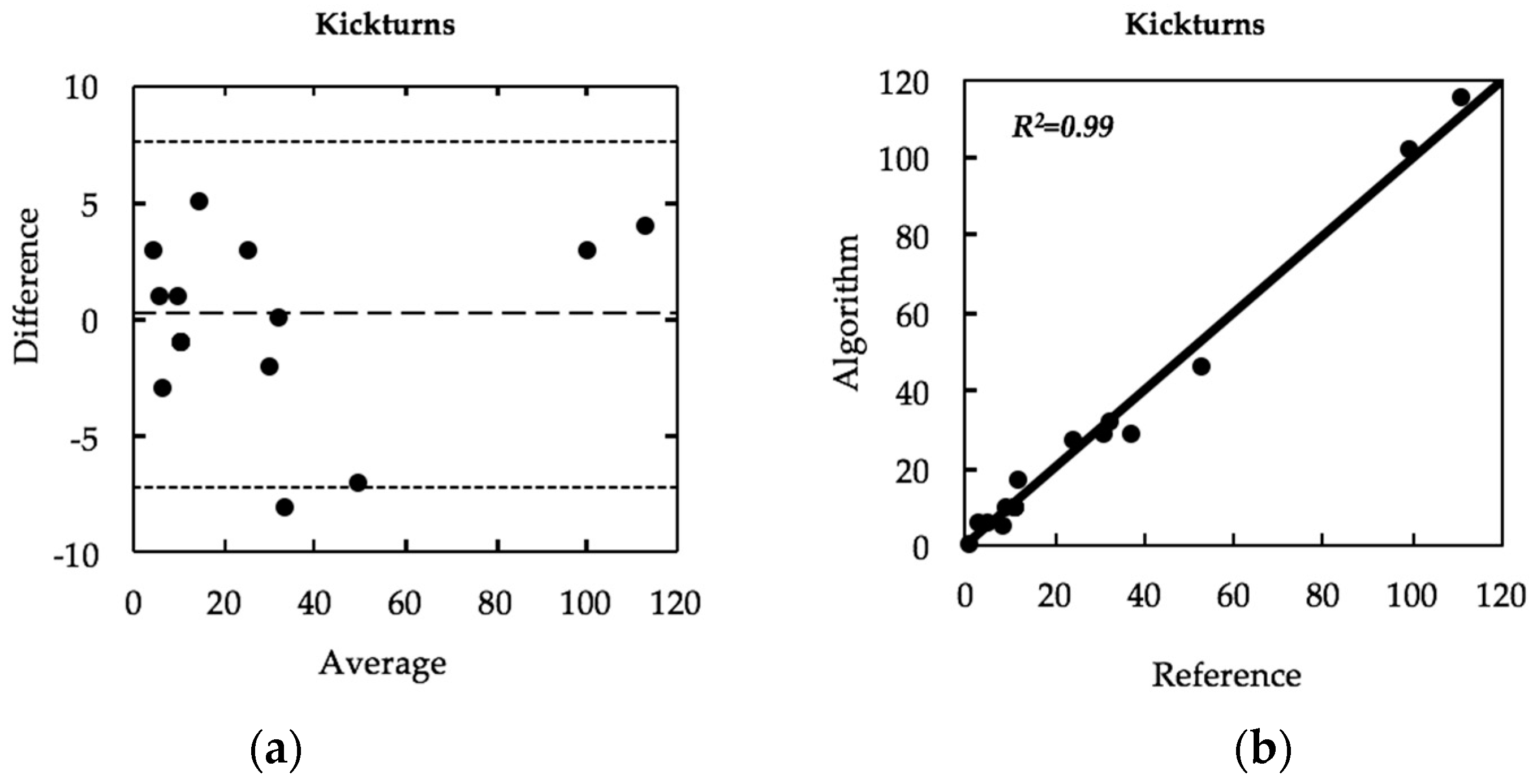
3.2.1. Kickturns Detection
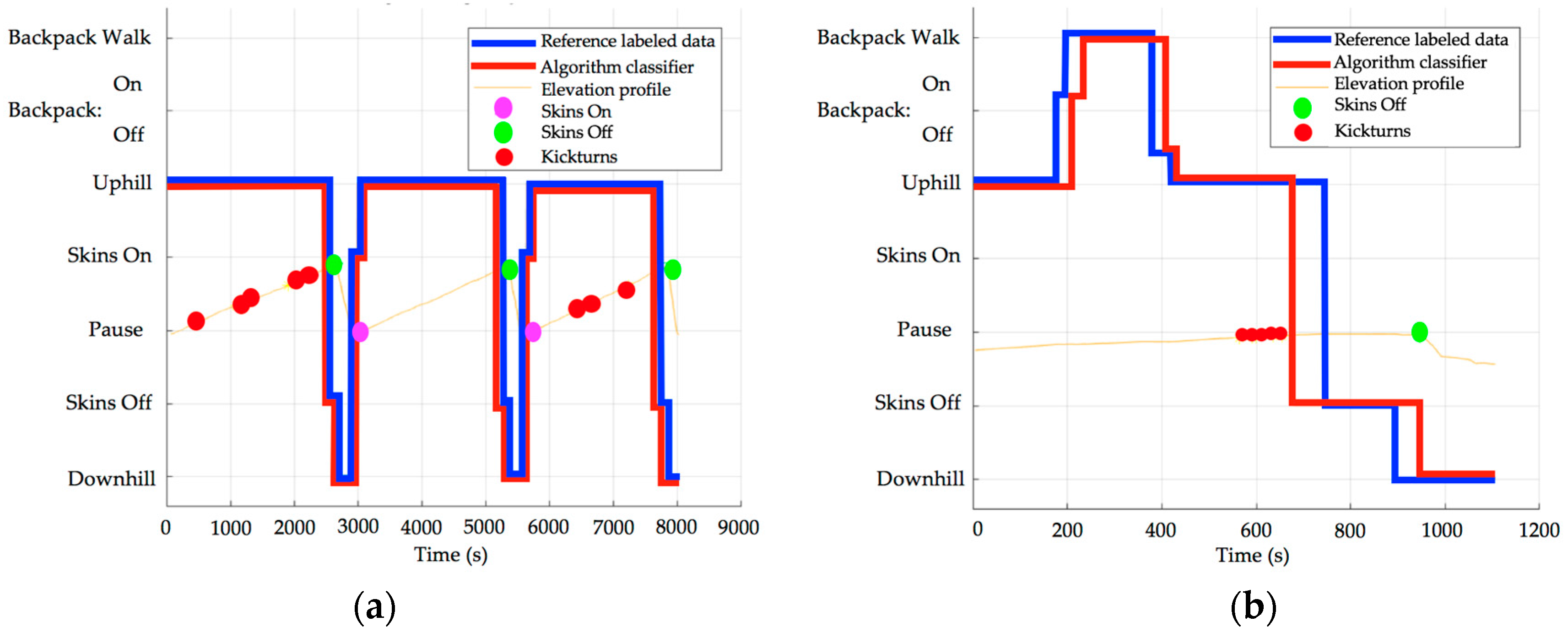
3.2.2. Other Transitions Detection and Classification
4. Discussion
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Abbreviations
| IMU | Inertial Measurement Unit |
| CD | Cadence (steps/min) |
| DFS | Distance from strides (m) |
| GP | Glide percentage (%) |
| PW | Power (W) |
| SD | Stride duration (s) |
| SL | Stride length (cm) |
| ST | Stride |
| SG | Slope Gradient (°) |
| KT | Kickturn |
| SOn | Skin on |
| SOff | Skin off |
| BP | Backpack |
| SE | Sensitivity (%) |
| SP | Specificity (%) |
References
- Praz, C.; Fasel, B.; Vuistiner, P.; Aminian, K.; Kayser, B. Optimal Slopes and Speeds in Uphill Ski Mountaineering: A Laboratory Study. Eur. J. Appl. Physiol. 2016, 116, 1011–1019. [Google Scholar] [CrossRef] [PubMed]
- Taylor, L.; Miller, E.; Kaufman, K.R. Static and Dynamic Validation of Inertial Measurement Units. Gait Posture 2017, 57, 80–84. [Google Scholar] [CrossRef] [PubMed]
- Mayagoitia, R.E.; Nene, A.V.; Veltink, P.H. Accelerometer and Rate Gyroscope Measurement of Kinematics: An Inexpensive Alternative to Optical Motion Analysis Systems. J. Biomech. 2002, 35, 537–542. [Google Scholar] [CrossRef]
- Yu, G.; Jang, Y.J.; Kim, J.; Kim, J.H.; Kim, H.Y.; Kim, K.; Panday, S.B. Potential of IMU Sensors in Performance Analysis of Professional Alpine Skiers. Sensors 2016, 16, 463. [Google Scholar] [CrossRef] [PubMed]
- Rawashdeh, S.A.; Rafeldt, D.A.; Uhl, T.L. Wearable IMU for Shoulder Injury Prevention in Overhead Sports. Sensors 2016, 16, 1847. [Google Scholar] [CrossRef] [PubMed]
- Dadashi, F.; Crettenand, F.; Millet, G.P.; Seifert, L.; Komar, J.; Aminian, K. Automatic Front-Crawl Temporal Phase Detection Using Adaptive Filtering of Inertial Signals. J. Sports Sci. 2013, 11, 1251–1260. [Google Scholar] [CrossRef] [PubMed]
- Fulton, S.K.; Pyne, D.B.; Burkett, B. Validity and Reliability of Kick Count and Rate in Freestyle Using Inertial Sensor Technology. J. Sports Sci. 2009, 27, 1051–1058. [Google Scholar] [CrossRef] [PubMed]
- Harding, J.W.; Mackintosh, C.G.; Hahn, A.G.; James, D.A. Classification of Aerial Acrobatics in Elite Half-Pipe Snowboarding Using Body Mounted Inertial Sensors (P237). In The Engineering of Sport; Springer: Paris, France, 2008; Volume 7, pp. 447–456. [Google Scholar]
- Bailey, G.P.; Harle, R. Assessment of Foot Kinematics during Steady State Running Using a Foot-Mounted IMU. Procedia Eng. 2014. [Google Scholar] [CrossRef]
- Setuain, I.; Lecumberri, P.; Ahtiainen, J.P.; Mero, A.A.; Häkkinen, K.; Izquierdo, M. Sprint Mechanics Evaluation Using Inertial Sensor-Based Technology: A Laboratory Validation Study. Scand. J. Med. Sci. Sport 2017. [Google Scholar] [CrossRef] [PubMed]
- Xu, J.Y.; Nan, X.; Ebken, V.; Wang, Y.; Pottie, G.J.; Kaiser, W.J. Integrated Inertial Sensors and Mobile Computing for Real-Time Cycling Performance Guidance via Pedaling Profile Classification. IEEE J. Biomed. Health Inform. 2015, 19, 440–445. [Google Scholar] [CrossRef] [PubMed]
- Marsland, F.; Lyons, K.; Anson, J.; Waddington, G.; Macintosh, C.; Chapman, D. Identification of Cross-Country Skiing Movement Patterns Using Micro. Sensors 2012, 12, 5047–5066. [Google Scholar] [CrossRef] [PubMed]
- Rindal, O.M.H.; Seeberg, T.M.; Tjønnås, J.; Haugnes, P.; Sandbakk, Ø. Automatic Classification of Sub-Techniques in Classical Cross-Country Skiing Using a Machine Learning Algorithm on Micro-Sensor Data. Sensors 2018, 18, 75. [Google Scholar] [CrossRef] [PubMed]
- Fasel, B.; Favre, J.; Chardonnens, J.; Gremion, G.; Aminian, K. An Inertial Sensor-Based System for Spatio-Temporal Analysis in Classic Cross-Country Skiing Diagonal Technique. J. Biomech. 2015, 48, 3199–3205. [Google Scholar] [CrossRef] [PubMed]
- Praz, C.; Fasel, B.; Vuistiner, P.; Aminian, K.; Kayser, B. Optimal Slopes and Speeds in Uphill Ski Mountaineering: A Field Study. Eur. J. Appl. Physiol. 2016, 116, 2017–2024. [Google Scholar] [CrossRef] [PubMed]
- Fasel, B.; Praz, C.; Kayser, B.; Aminian, K. Measuring Spatio-Temporal Parameters of Uphill Ski-Mountaineering with Ski-Fixed Inertial Sensors. J. Biomech. 2016, 49, 3052–3055. [Google Scholar] [CrossRef] [PubMed]
- Tosi, P.; Leonardi, A.; Zerbini, L.; Rosponi, A.; Schena, F. Energy Cost and Efficiency of Ski Mountaineering. A Laboratory Study. J. Sports Med. Phys. Fit. 2010, 50, 400–406. [Google Scholar]
- Bland, J.M.; Altman, D. Statistical Methods for Assessing Agreement between Two Methods of Clinical Measurement. Lancet 1986, 1, 307–310. [Google Scholar] [CrossRef]
- Swart, J.; Lamberts, R.P.; Derman, W.; Lambert, M.I. Effects of High-Intensity Training by Heart Rate or Power in Well-Trained Cyclists. J. Strength Cond. Res. 2009. [Google Scholar] [CrossRef] [PubMed]
- BreitschŠdel, F.; Andersen, R.; Stjernstr, E. A Comparison between Timed and IMU Captured Nordic Ski Glide Tests. Procedia Eng. 2012, 34, 397–402. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Protocol | (A) Parameters Estimation | (B) Transitions Classification |
|---|---|---|
| Number of subjects | 5 | 11 |
| Age | 47.4 (±12.5) | 40.1 (±13.1) |
| Weight (kg) | 71.7 (±5.6) | 72.6 (±5.1) |
| Height (cm) | 179 (±4.7) | 180.4 (±5.0) |
| Output of the algorithm: | Cadence (CD) Distance from strides (DFS) Glide percentage (GP) Power (PW) Stride duration (SD) Stride length (SL) Stride (ST) Slope gradient (SG) | Kickturns (KT) Skin On (SOn) Skin Off (SOff) Backpack (BP) |
| n = 25 (5 Subjects) | Algorithm (±std) | Reference (±std) | Mean Absolute Difference (±std) | Mean Relative Difference% (±std) |
|---|---|---|---|---|
| Cadence (steps/min) | 86.7 (±13.2) | 86.1 (±12.5) | 1.1 (±1.0) | 0.6 (±1.5) |
| Distance from Strides (m) | 287.3 (±178.0) | 303.8 (±178.0) | 25.5 (±14.8) | −9.7 (±9.6) |
| Glide percentage (%) | 52.9 (±6.7) | 56.9 (±7.8) | 4.1 (±2.9) | −6.9 (±4.5) |
| Stride duration (s) | 1.41 (±0.22) | 1.42 (±0.21) | 0.01 (±0.01) | −0.83 (±1.2) |
| Stride length (cm) | 171.9 (±30.1) | 185.4 (±38.0) | 15.6 (±14.1) | −6.5 (±7.7) |
| Strides | 165.0 (±106.3) | 169.2 (±105.2) | 4.4 (±3.7) | −4.1 (±5.8) |
| Power (W) | 119.7 (±50.8) | 120.2 (±54.2) | 12.1 (±12.6) | −4.9 (±26.2) |
| Slope gradient (°) | 4.6 (±5.0) | 4.9 (±4.3) | 1.1 (±0.7) | −11.1 (±86.1) |
| Kickturn Threshold (°/s) | Accuracy (Precision) | Sensibility (SE)% + 95% CI | Specificity (SP)% + 95% CI |
|---|---|---|---|
| 50 | 21.7 (±19.7) | 97% [95; 98] | 69% [66; 71] |
| 70 | 5.1 (±7.0) | 96% [94; 98] | 76% [72; 79] |
| 90 | 0.5 (±3.6) | 95% [92; 96] | 78% [72; 82] |
| 95 | −0.2 (±3.8) | 95% [93; 97] | 79% [73; 84] |
| 100 | −0.8 (±3.5) | 95% [92; 96] | 78% [72; 83] |
| 110 | −1.7 (±3.0) | 93% [90; 95] | 78% [70; 84] |
| 130 | −4.3 (±5.3) | 86% [82; 89] | 77% [67; 85] |
| 150 | −7.2 (±7.7) | 78% [74; 82] | 88% [76; 95] |
| n = 15 (11 Subjects) | Algorithm | Reference | Difference A–R (std) |
|---|---|---|---|
| SkinOn (total: 40) | 0.8 (±1.0) | 0.9 (±1.1) | −0.2 (±0.6) |
| SkinOff (total: 59) | 1.8 (±1.0) | 1.9 (±1.0) | −0.1 (±0.4) |
| Backpack On/Off(total: 38) | 2.3 (±1.9) | 2.4 (±2.1) | −0.1 (±0.5) |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gellaerts, J.; Bogdanov, E.; Dadashi, F.; Mariani, B. In-Field Validation of an Inertial Sensor-Based System for Movement Analysis and Classification in Ski Mountaineering. Sensors 2018, 18, 885. https://doi.org/10.3390/s18030885
Gellaerts J, Bogdanov E, Dadashi F, Mariani B. In-Field Validation of an Inertial Sensor-Based System for Movement Analysis and Classification in Ski Mountaineering. Sensors. 2018; 18(3):885. https://doi.org/10.3390/s18030885
Chicago/Turabian StyleGellaerts, Jules, Evgeny Bogdanov, Farzin Dadashi, and Benoit Mariani. 2018. "In-Field Validation of an Inertial Sensor-Based System for Movement Analysis and Classification in Ski Mountaineering" Sensors 18, no. 3: 885. https://doi.org/10.3390/s18030885
APA StyleGellaerts, J., Bogdanov, E., Dadashi, F., & Mariani, B. (2018). In-Field Validation of an Inertial Sensor-Based System for Movement Analysis and Classification in Ski Mountaineering. Sensors, 18(3), 885. https://doi.org/10.3390/s18030885