DOA Estimation for Underwater Wideband Weak Targets Based on Coherent Signal Subspace and Compressed Sensing


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Receiving Data Model for ULA
3. CSS-CS Wideband Target DOA Estimation
3.1. Wideband Target DOA Estimation Model
3.2. Construction of Focusing Matrix
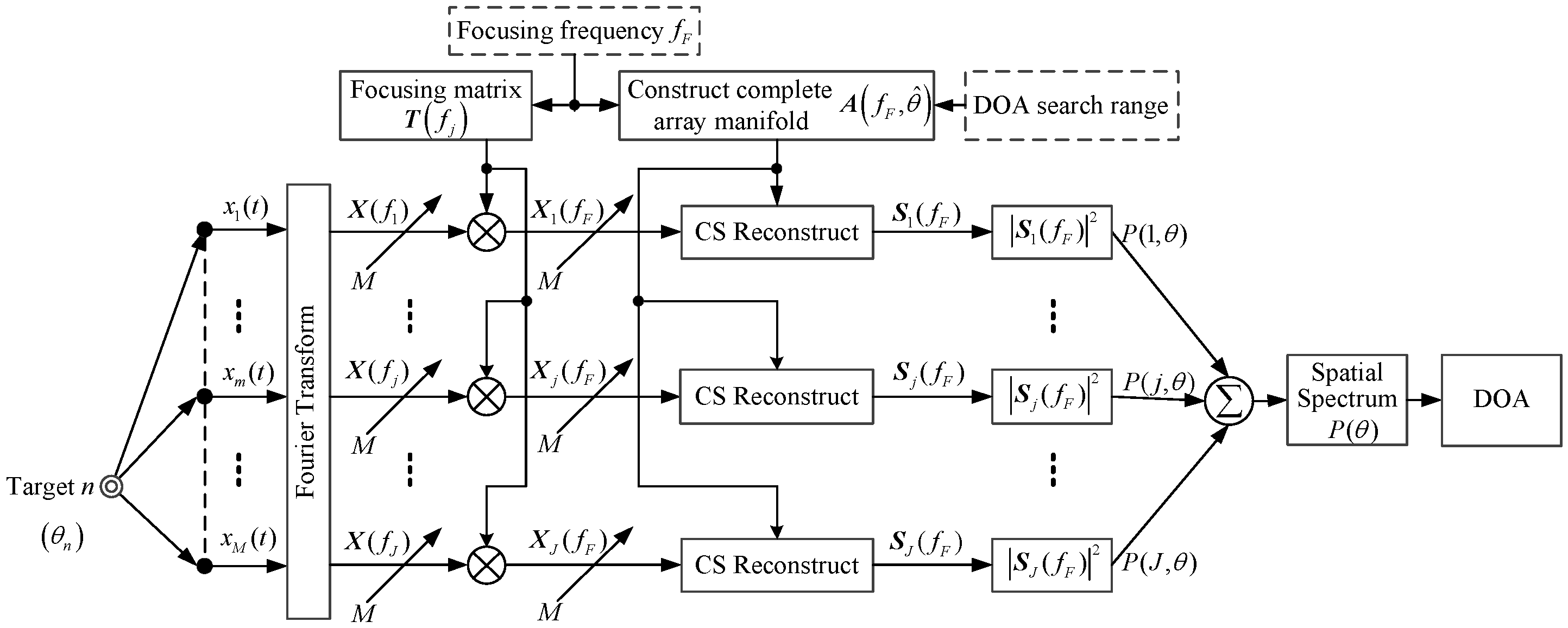
3.3. Compressed Sensing DOA Estimation
- Step 1.
- The Fourier transform of is used to convert time domain data into frequency domain data .
- Step 2.
- Choose the focus frequency and solve the focusing matrix from Equation (10).
- Step 3.
- From Equation (7), the with signal subspaces of different frequencies are mapped to the with signal subspaces on the same reference frequency .
- Step 4.
- Divide the whole space into with the desired direction interval and construct the complete array manifold from Equation (13).
- Step 5.
- From Equation (16), estimate the sub-band target signal from the focused sub-band received signal .
- Step 6.
- From Equation (17), calculate the spatial spectrum of each j sub-band.
- Step 7.
- From Equation (18), estimate the total spatial spectrum by summing the spatial spectra of all sub-bands.
- Step 8.
- Estimate the DOA of the target by searching for the peak of .
4. Data Verification and Analysis
4.1. Simulation Data Analysis
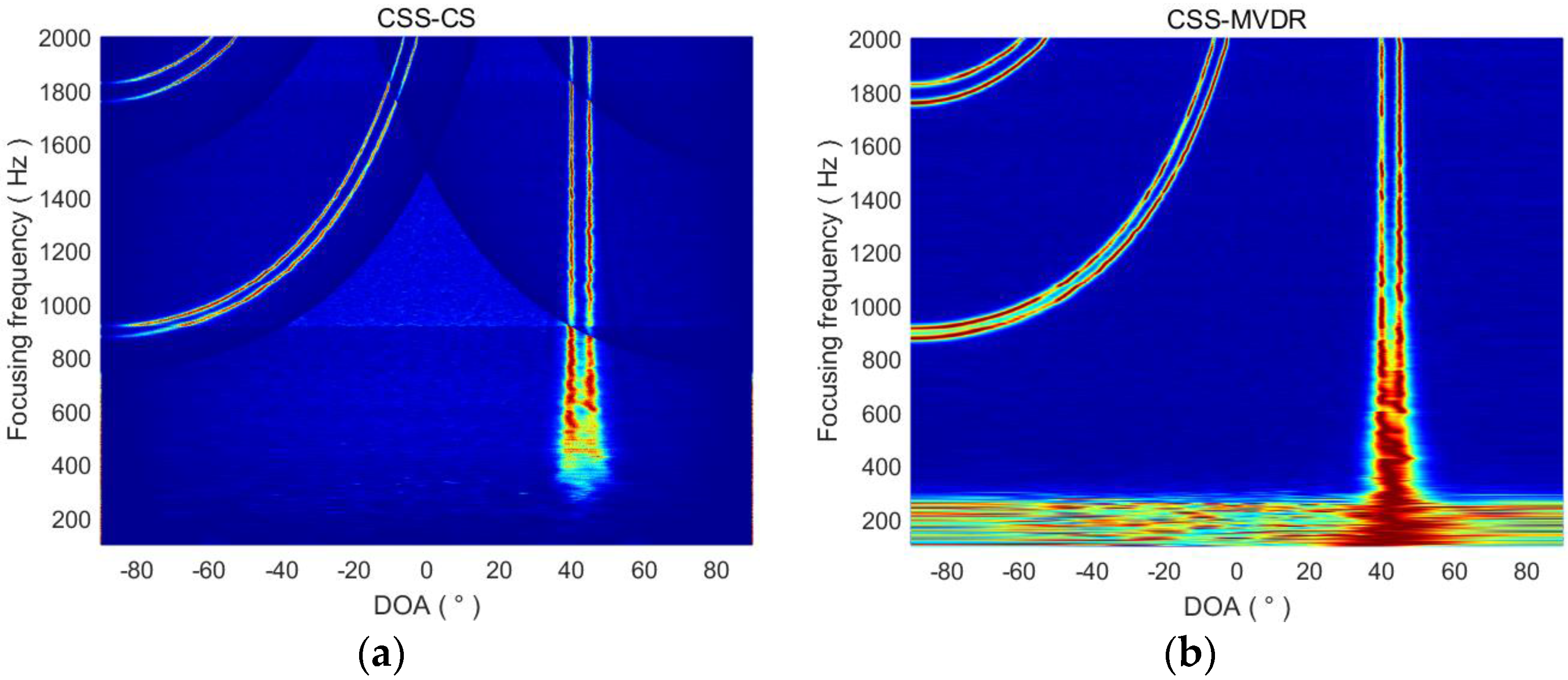
4.1.1. Analysis of the Focused Frequency Selection Problem
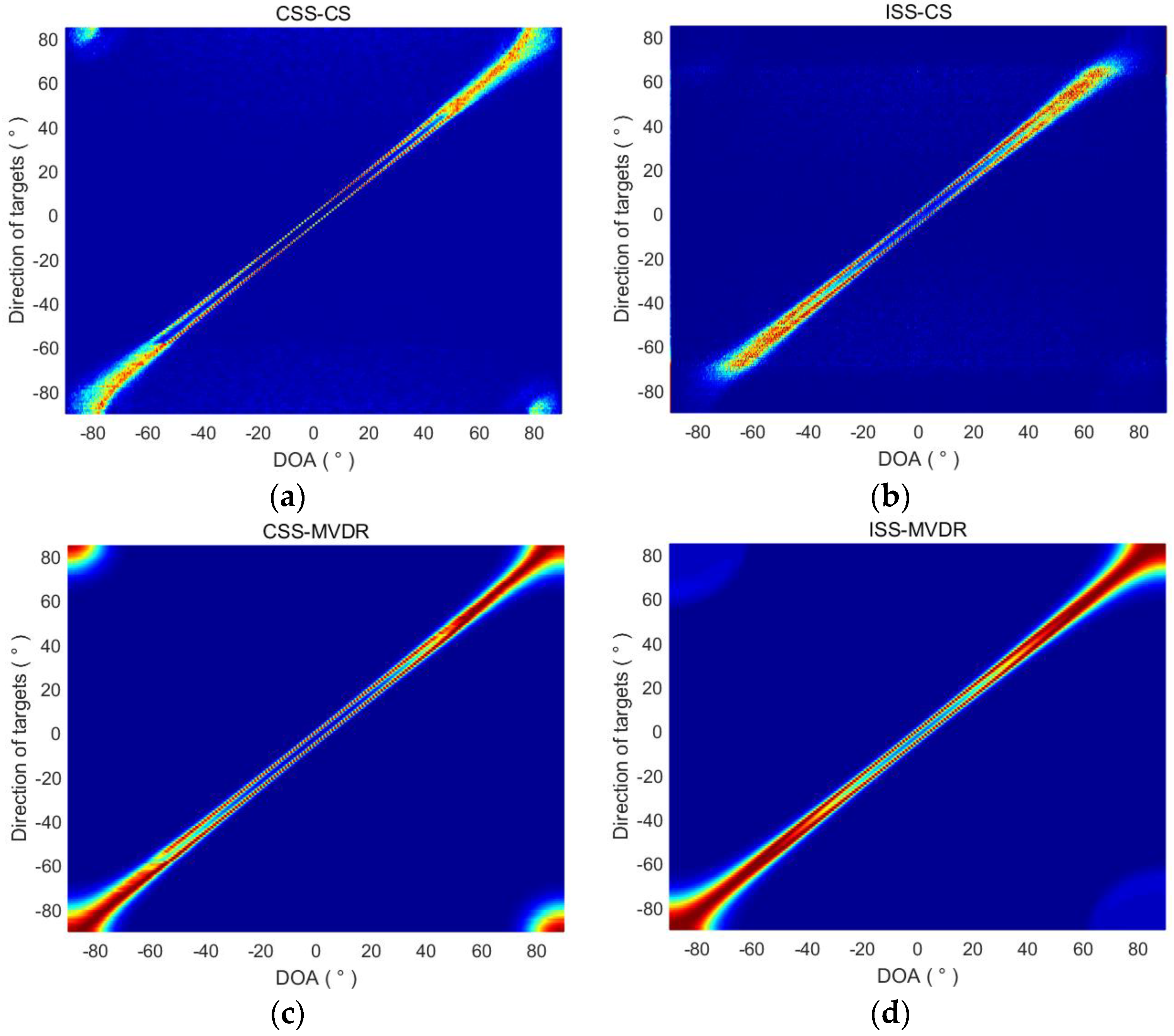
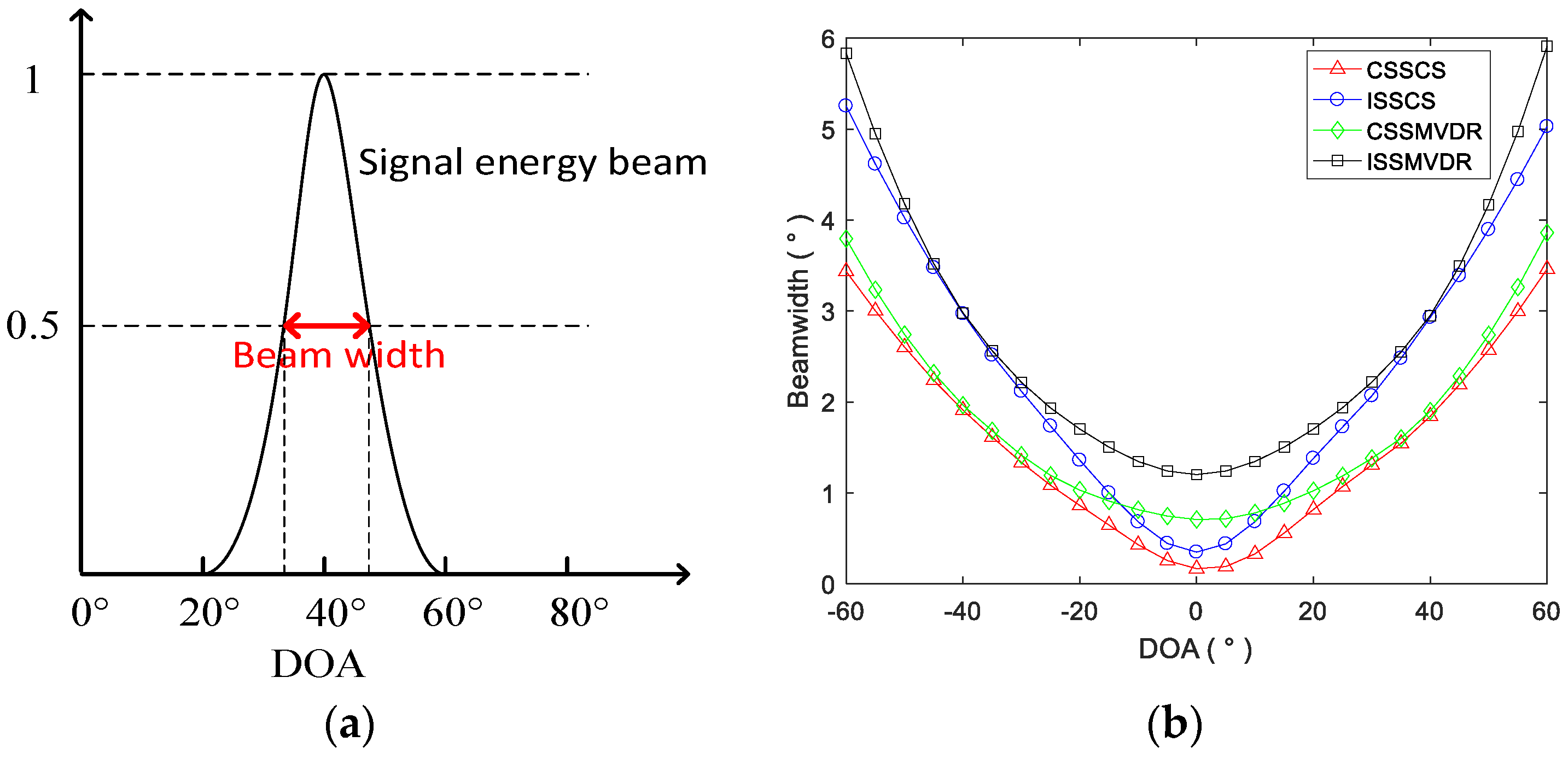
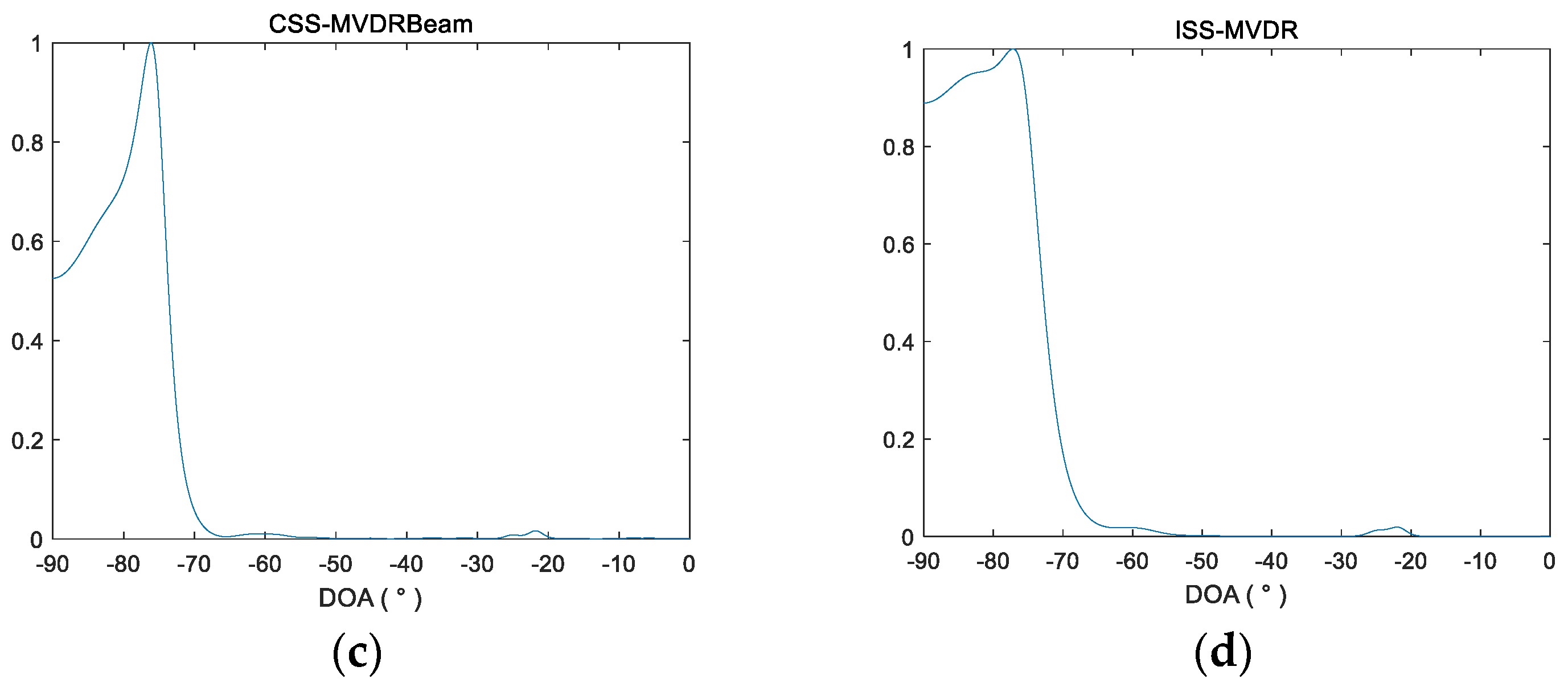
4.1.2. Performance Analysis of Directional Resolution
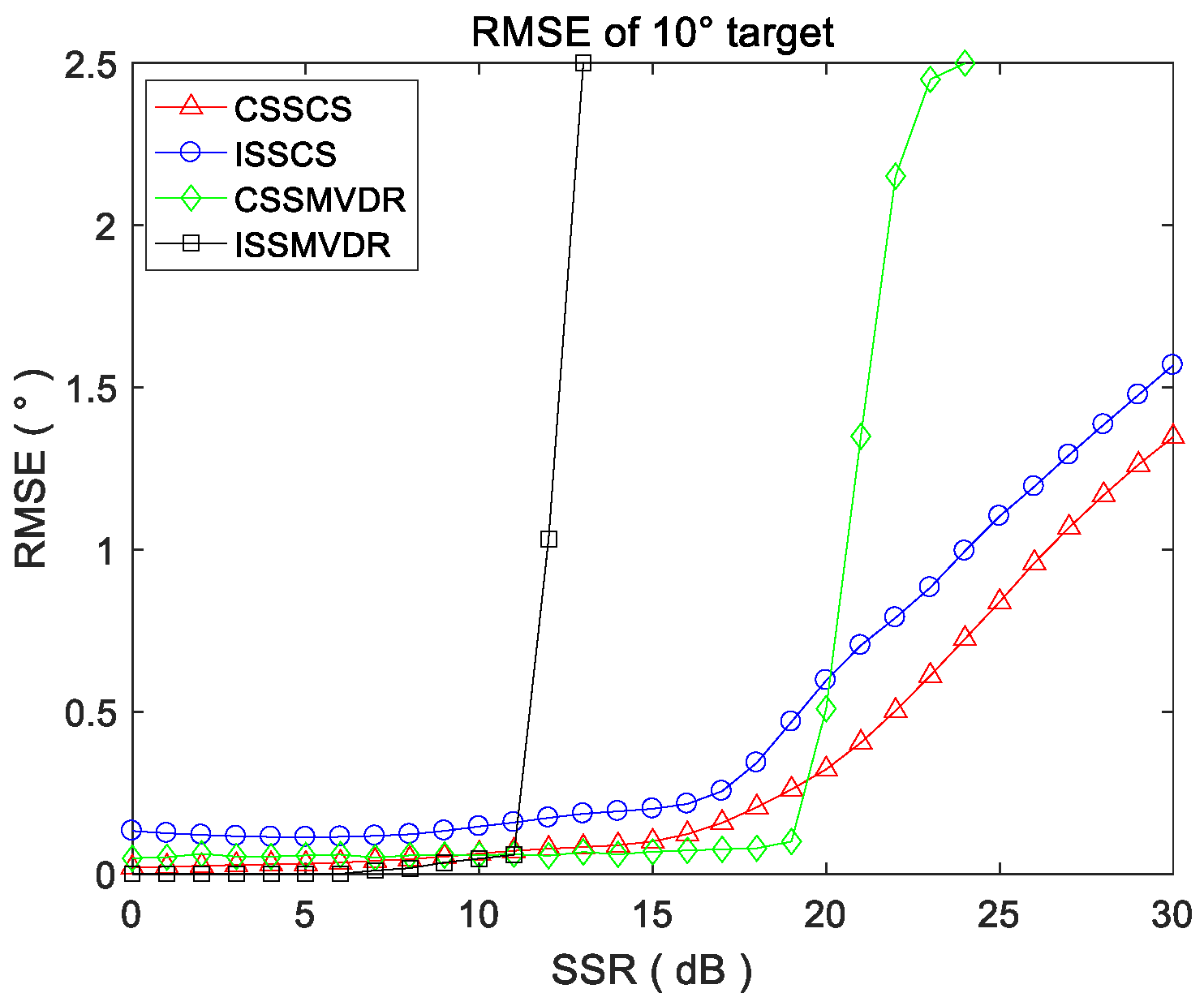
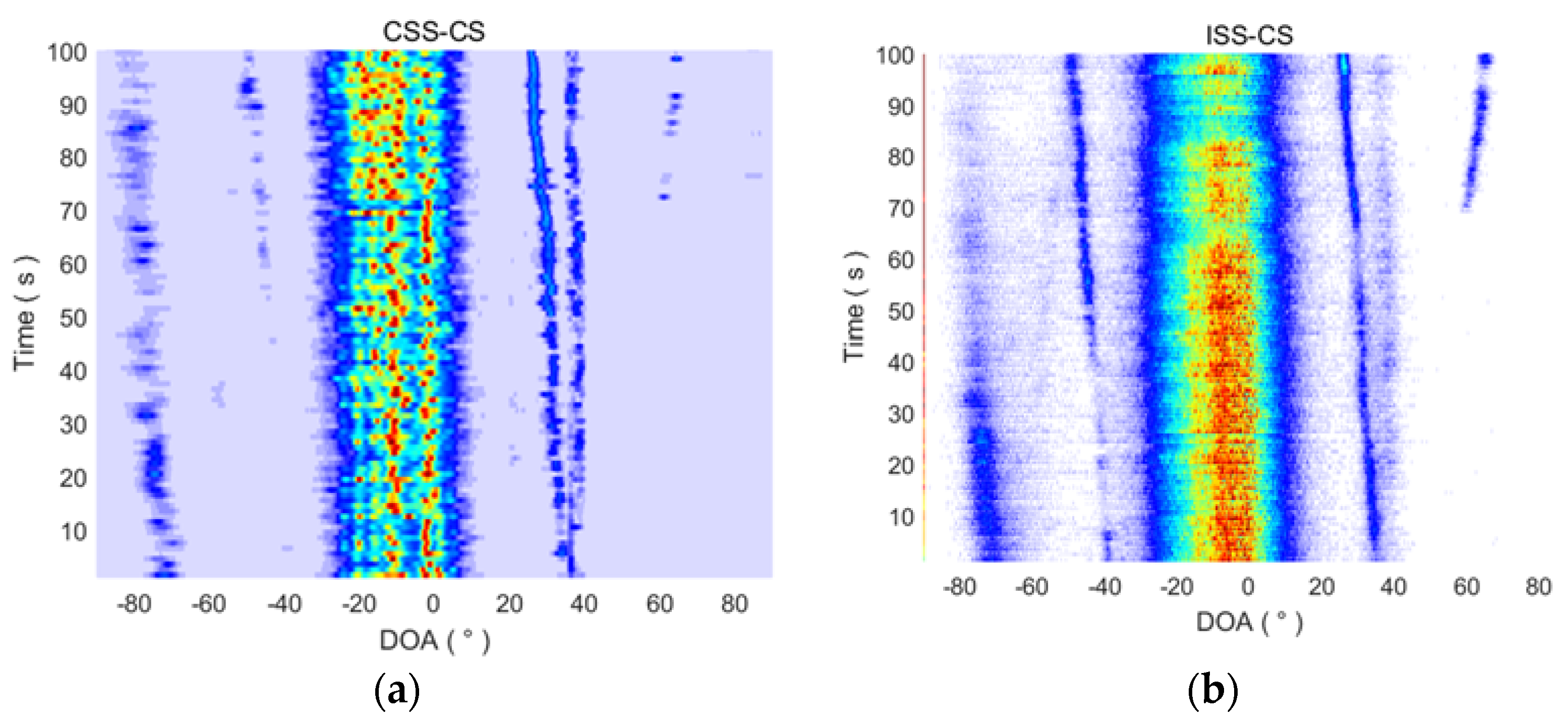
4.1.3. Performance Analysis of DOA Estimation for Weak Targets
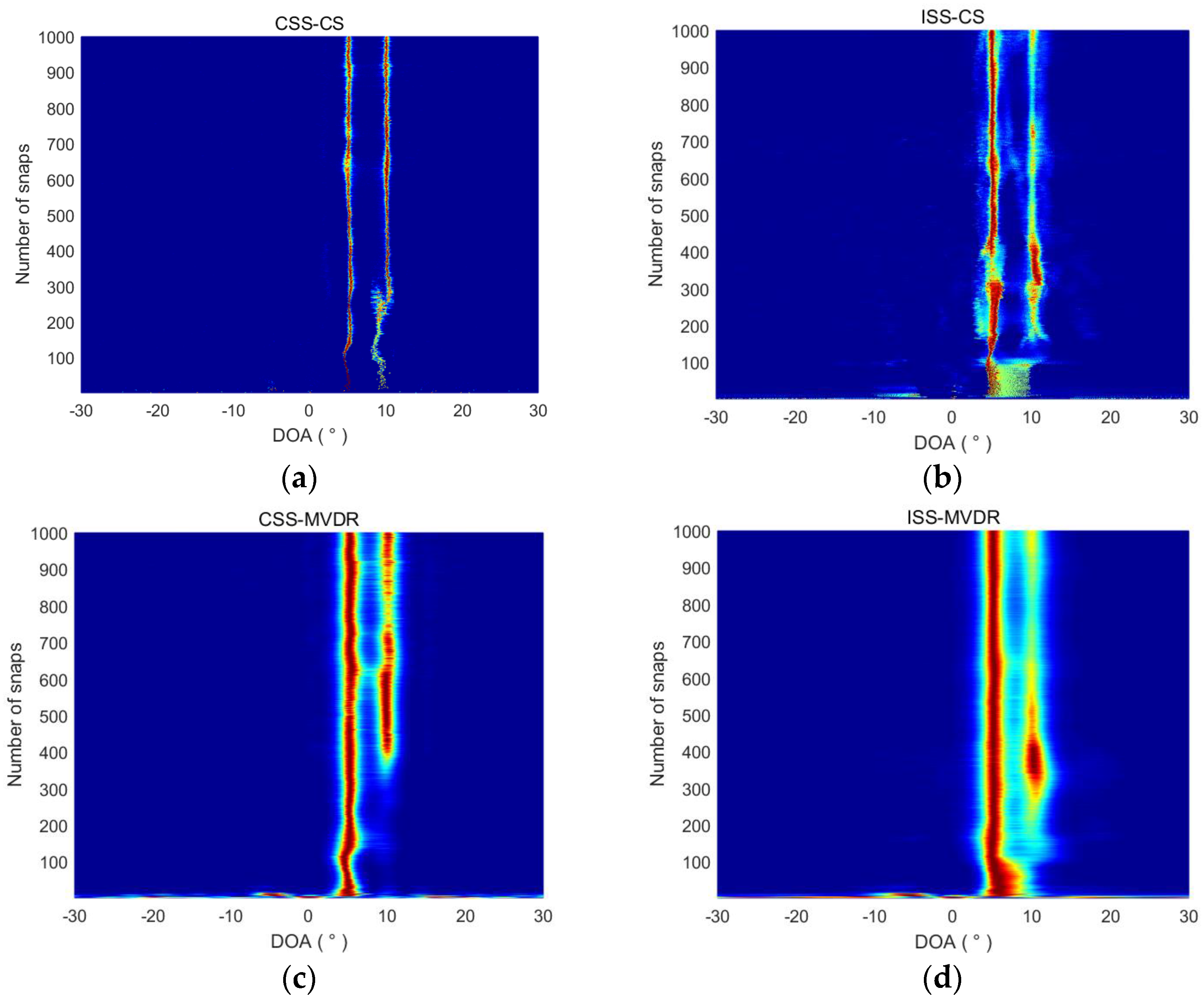
4.1.4. Performance Analysis of the Snapshot Number
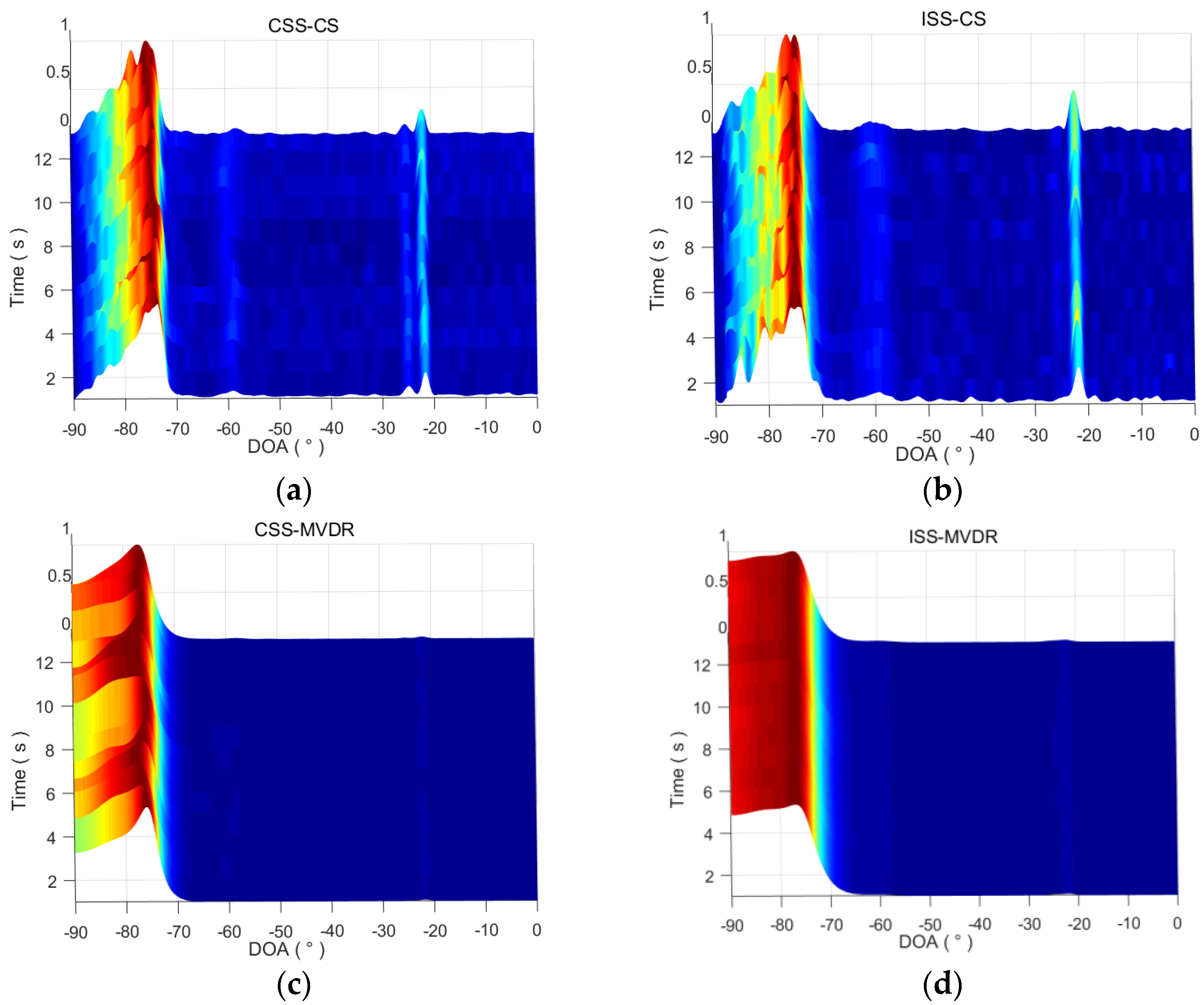
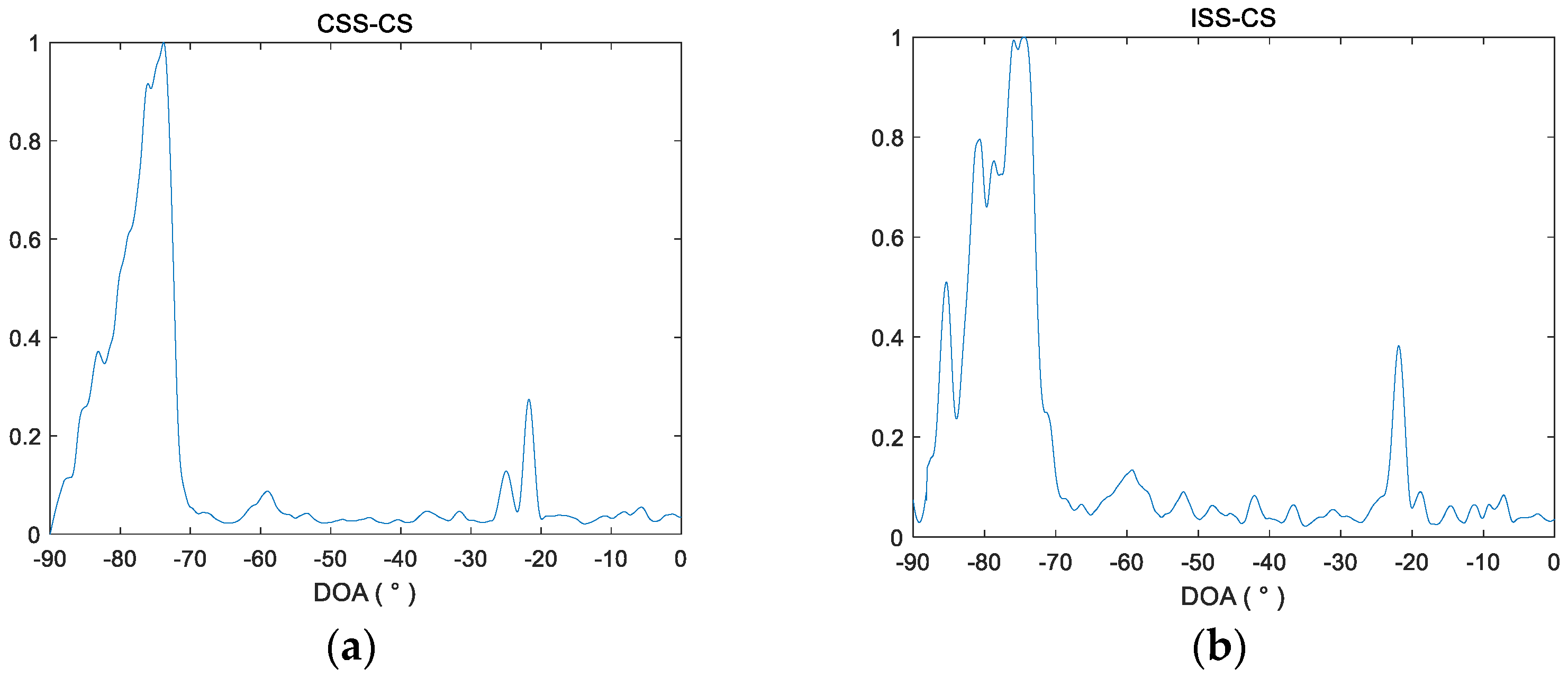
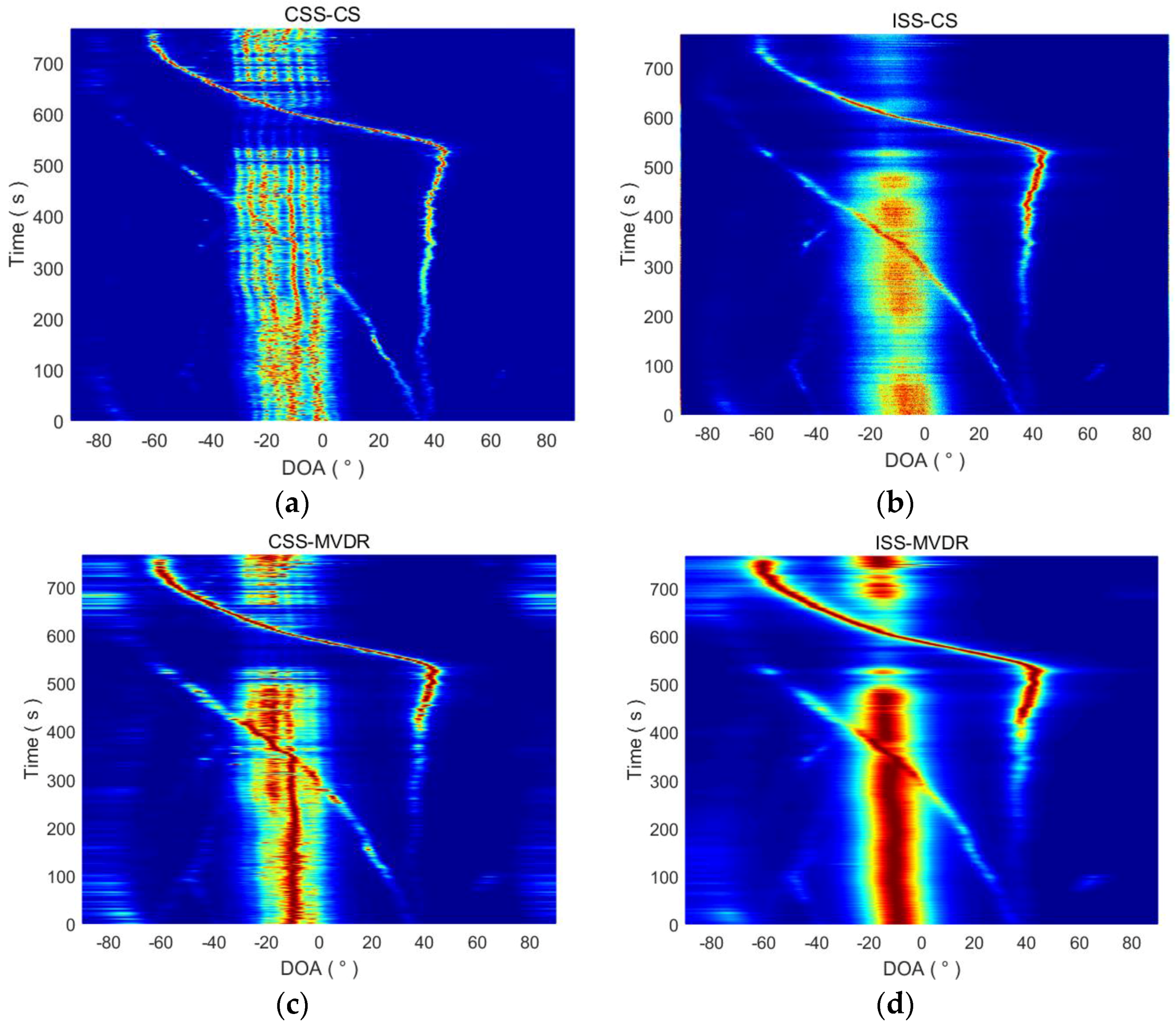
4.1.5. Towed Line Array Sonar Simulation Data Analysis
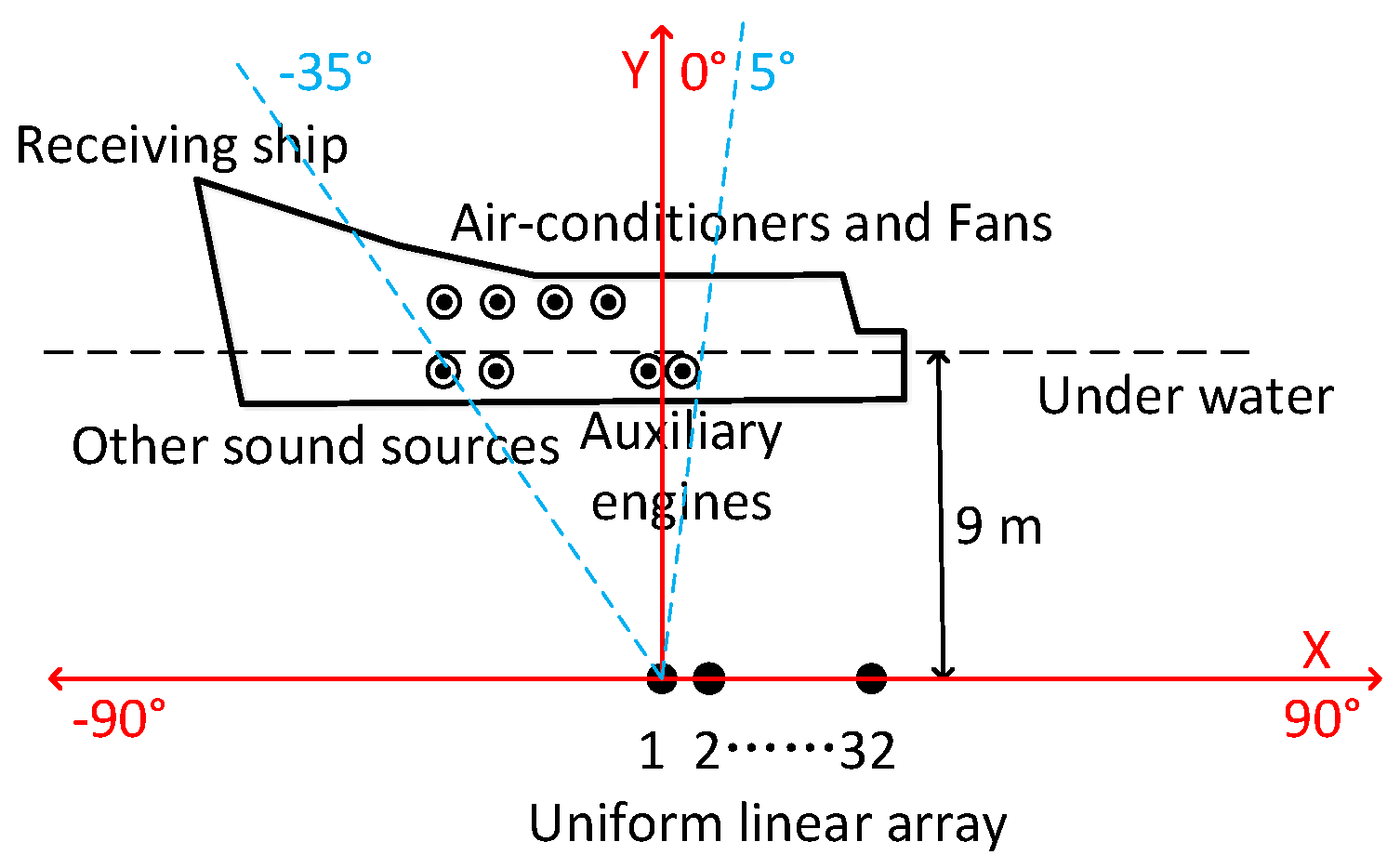
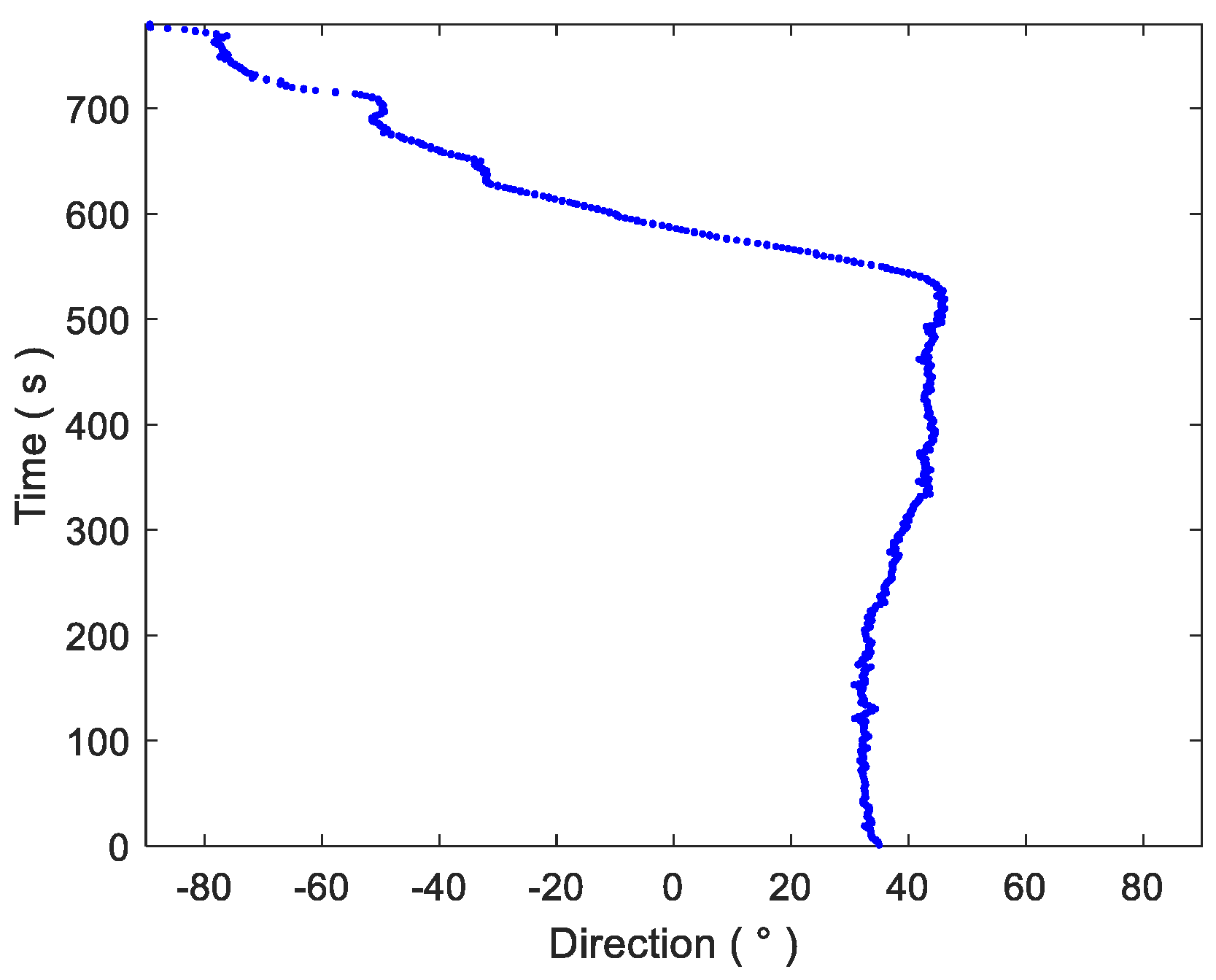
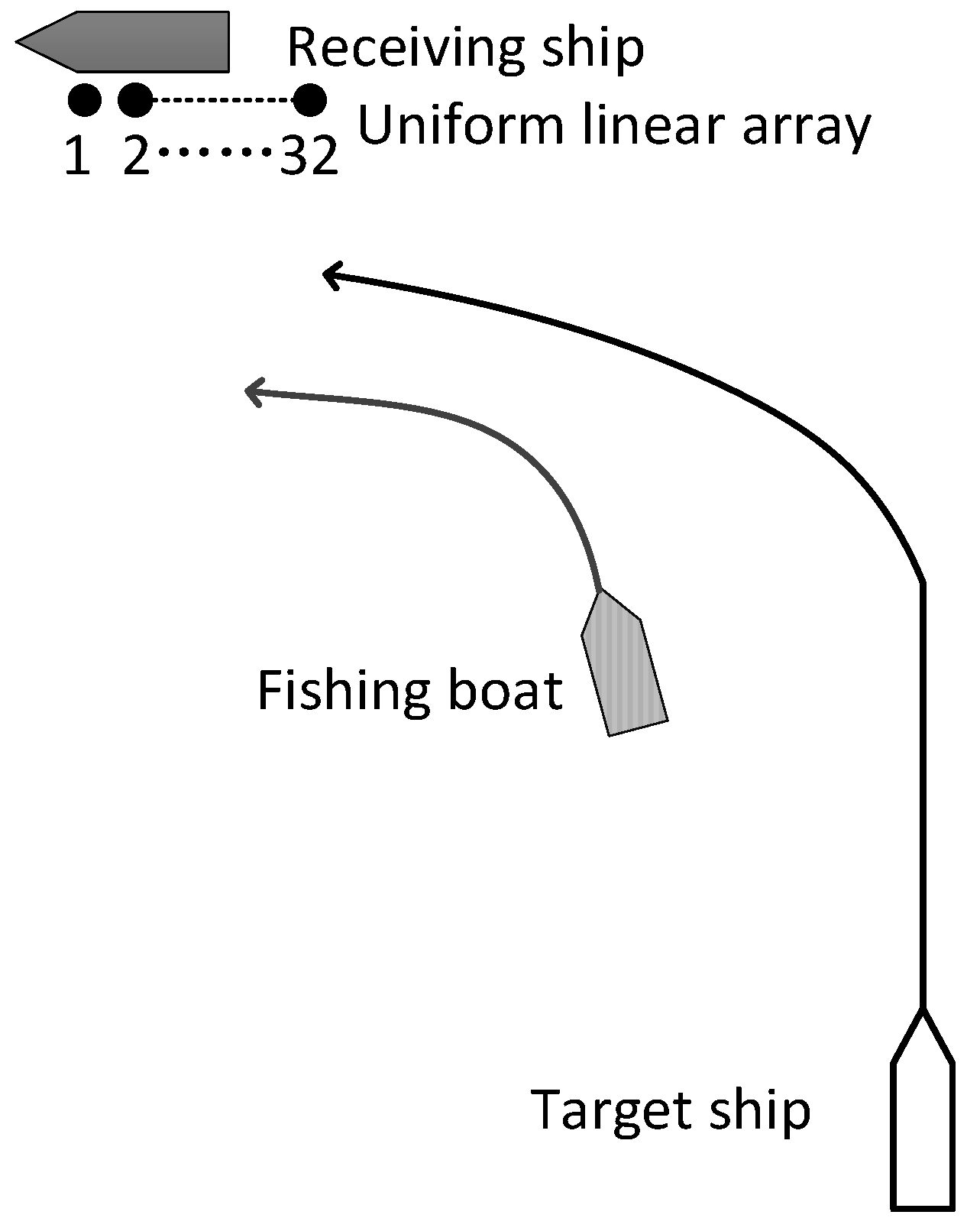
4.2. Marine Trial Data Verification and Analysis
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Bienvenu, G.; Kopp, L. Decreasing high resolution method sensitivity by conventional beamformer preprocessing. In Proceedings of the IEEE International Conference on ICASSP ’84, San Diego, CA, USA, 19–21 March 1984; pp. 714–717. [Google Scholar] [CrossRef]
- Pirkl, R.J.; Aughenbaugh, J.M. Bayesian passive sonar tracking with conventional beamformer-level data. In Proceedings of the 18th IEEE International Conference on Information Fusion, Washington, DC, USA, 6–9 July 2015; pp. 621–628. [Google Scholar]
- Capon, J. High-resolution frequency-wavenumber spectrum analysis. Proc. IEEE 1969, 57, 1408–1418. [Google Scholar] [CrossRef]
- Stoica, P.; Moses, R. Spectral Analysis of Signals; Prentice-Hall: Upper Saddle River, NJ, USA, 2005. [Google Scholar]
- Marzetta, T.L. A new interpretation of Capon’s maximum likelihood method of frequency-wavenumber spectral estimation. IEEE Trans. Acoust. Speech Signal Process. 1983, 31, 445–449. [Google Scholar] [CrossRef]
- Aubry, A.; Carotenuto, V.; Maio, A.D. A New Optimality Property of the Capon Estimator. IEEE Signal Process. Lett. 2017, 24, 1706–1708. [Google Scholar] [CrossRef]
- Vorobyov, S.A.; Gershman, A.B.; Luo, Z.Q. Robust adaptive beamforming using worst-case performance optimization: A solution to the signal mismatch problem. IEEE Trans. Acoust. Speech Signal Process. 2003, 51, 313–324. [Google Scholar] [CrossRef]
- Li, J.; Stoica, P.; Wang, Z. On robust Capon beamforming and diagonal loading. IEEE Trans. Acoust. Speech Signal Process. 2003, 51, 1702–1715. [Google Scholar]
- Li, J.; Stoica, P.; Wang, Z. Doubly constrained robust Capon beamformer. IEEE Trans. Acoust. Speech Signal Process. 2004, 52, 2407–2423. [Google Scholar] [CrossRef]
- Kim, S.-J.; Magnani, A.; Mutapcic, A.; Boyd, S.P.; Luo, Z.-Q. Robust beamforming via worst-case SINR maximization. IEEE Trans. Acoust. Speech Signal Process. 2008, 56, 1539–1547. [Google Scholar] [CrossRef]
- Beck, A.; Eldar, Y.C. Doubly Constrained Robust Capon Beamformer with Ellipsoidal Uncertainty Sets. IEEE Trans. Acoust. Speech Signal Process. 2007, 55, 753–758. [Google Scholar] [CrossRef]
- Aubry, A.; Maio, A.D.; Huang, Y.; Piezzo, M. Robust Design of Radar Doppler Filters. IEEE Trans. Acoust. Speech Signal Process. 2016, 64, 5848–5860. [Google Scholar] [CrossRef]
- Aubry, A.; Carotenuto, V.; Maio, A.D. New Results on Generalized Fractional Programming Problems with Toeplitz Quadratics. IEEE Signal Process. Lett. 2016, 23, 848–852. [Google Scholar] [CrossRef]
- Somasundaram, S.D. Wideband robust capon beamforming for passive sonar. IEEE J. Ocean. Eng. 2013, 38, 308–322. [Google Scholar] [CrossRef]
- Bell, K.L.; Ephraim, Y.; Trees, H.L.V. A Bayesian approach to robust adaptive beamforming. IEEE Trans. Acoust. Speech Signal Process. 2000, 48, 386–398. [Google Scholar] [CrossRef]
- Karimian-Azari, S.; Jensen, J.R.; Christensen, M.G. Fast joint DOA and pitch estimation using a broadband MVDR beamformer. In Proceedings of the European Signal Processing Conference (EUSIPCO), Marrakech, Morocco, 9–13 September 2013; pp. 1–5. [Google Scholar]
- Guo, Z.; Wang, X.; Wei, H. Millimeter-Wave channel estimation based on two-dimensional beamspace MUSIC method. IEEE Trans. Wirel. Commun. 2017, 16, 5384–5394. [Google Scholar] [CrossRef]
- Vasylyshyn, V. Removing the outliers in root-MUSIC via pseudo-noise resampling and conventional beamformer. Signal Process. 2013, 93, 3423–3429. [Google Scholar] [CrossRef]
- Zhang, J.; Dai, J.; Ye, Z. An extended TOPS algorithm based on incoherent signal subspace method. Signal Process. 2010, 90, 3317–3324. [Google Scholar] [CrossRef]
- Ma, J.; He, P. An improved method of energy-peak incoherent signal-subspace method based on time-frequency sparseness of speech signal and its application. In Proceedings of the 2014 12th International Conference on Signal Processing (ICSP), Hangzhou, China, 19–23 October 2014; pp. 346–351. [Google Scholar] [CrossRef]
- Wang, H.; Kaveh, M. Coherent signal-subspace processing for the detection and estimation of angles of arrival of multiple wide-band sources. IEEE Trans. Acoust. Speech Signal Process. 1985, 33, 823–831. [Google Scholar] [CrossRef]
- Hung, H.; Kavehand, M. Focussing matrices for coherent signal-subspace processing. IEEE Trans. Acoust. Speech Signal Process. 1988, 36, 1272–1281. [Google Scholar] [CrossRef]
- Hung, H.S.; Mao, C.Y. Robust coherent signal-subspace processing for directions-of-arrival estimation of wideband sources. IEE Proc. Radar Sonar Navig. 1994, 141, 256–262. [Google Scholar] [CrossRef]
- Li, W.; Li, Y.; Yu, W. On adaptive beamforming for coherent interference suppression via virtual antenna array. Progress Electromagn. Res. 2012, 125, 165–184. [Google Scholar] [CrossRef]
- Chen, H.W.; Zhao, J.W. Wideband MVDR beamforming for acoustic vector sensor linear array. IEE Proc. Radar Sonar Navig. 2004, 151, 158–162. [Google Scholar] [CrossRef]
- Bucris, Y.; Cohen, I.; Doron, M.A. Robust focusing for wideband MVDR beamforming. In Proceedings of the 2010 IEEE Sensor Array and Multichannel Signal Processing Workshop (SAM), Jerusalem, Israel, 4–7 October 2010; pp. 1–4. [Google Scholar] [CrossRef]
- Cetin, M.; Malioutov, D.M.; Willskqy, A.S. A variational technique for source localization based on a sparse signal reconstruction perspective. In Proceedings of the 2002 IEEE International Conference on Acoustics, Speech, and Signal Processing (ICASSP), Orlando, FL, USA, 13–17 May 2002; pp. III-2965–III-2968. [Google Scholar] [CrossRef]
- Malioutov, D.M.; Cetin, M.; Willsky, A.S. A sparse signal reconstruction perspective for source localization with sensor arrays. IEEE Trans. Acoust. Speech Signal Process. 2005, 55, 3010–3022. [Google Scholar] [CrossRef]
- Candes, E.J. Compressive sampling. In Proceedings of the International Congress of Mathematicians; European Mathematical Society: Madrid, Spain, 2006; pp. 1433–1452. [Google Scholar]
- Donobo, D.L. Compressed sensing. IEEE Trans. Inf. Theory 2006, 52, 1289–1306. [Google Scholar] [CrossRef]
- Candes, E.; Romberg, J.; Tao, T. Robust uncertainty principles: Exact signal reconstruction from highly incomplete frequency information. IEEE Trans. Inf. Theory 2004, 52, 489–509. [Google Scholar] [CrossRef]
- Candes, E.; Tao, T. Near optimal signal recovery from random projections: Universal encoding strategies. IEEE Trans. Inf. Theory 2006, 52, 5406–5425. [Google Scholar] [CrossRef]
- Zhu, W.; Chen, B.X. Novel methods of DOA estimation based on compressed sensing. Multidimens. Syst. Signal Process. 2013, 26, 113–123. [Google Scholar] [CrossRef]
- Ibrahim, M.; Roemer, F.; Galdo, G.D. On the design of the measurement matrix for compressed sensing based DOA estimation. In Proceedings of the IEEE International Conference on Acoustics, Speech, and Signal Processing (ICASSP), Brisbane, QLD, Australia, 19–24 April 2015; pp. 3631–3635. [Google Scholar] [CrossRef]
- Ioushua, S.S.; Yair, O.; Cohen, D. CaSCADE: Compressed Carrier and DOA Estimation. IEEE Trans. Acoust. Speech Signal Process. 2017, 65, 2645–2658. [Google Scholar] [CrossRef]
- Kang, C.Y.; Li, Q.Y.; Zhang, X.H. Direction of arrival estimation and signal recovery based on single snapshot compressed sensing in frequency domain. Chin. J. Acoust. 2016, 35, 125–134. [Google Scholar]
- Kang, C.Y.; Li, Q.Y.; Jiao, Y.M. Direction of arrival estimation and signal recovery for underwater target based on compressed sensing. In Proceedings of the 2015 8th International Conference on Image and Signal Processing (CISP), Shenyang, China, 14–16 October 2015; pp. 1277–1282. [Google Scholar] [CrossRef]
- Valaee, S.; Kabal, P. Wideband array processing using a two-sided correlation transformation. IEEE Trans. Acoust. Speech Signal Process. 1995, 43, 160–172. [Google Scholar] [CrossRef]
- Frikel, M.; Bourennane, S. Fast algorithm for the wideband array processing using a two-sided correlation transformation. In Proceedings of the 1996 8th European Signal Processing Conference (EUSIPCO), Trieste, Italy, 10–13 September 1996; pp. 1–4. [Google Scholar]
- Ren, X.; Feng, H. The fast algorithm for two-sided correlation transformation based on propagator method. In Proceedings of the 2016 IEEE International Conference on Signal Processing, Communications and Computing (ICSPCC), Hong Kong, China, 5–8 August 2016; pp. 1–4. [Google Scholar] [CrossRef]



















© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, J.; Lin, Q.-h.; Kang, C.-y.; Wang, K.; Yang, X.-T. DOA Estimation for Underwater Wideband Weak Targets Based on Coherent Signal Subspace and Compressed Sensing. Sensors 2018, 18, 902. https://doi.org/10.3390/s18030902
Li J, Lin Q-h, Kang C-y, Wang K, Yang X-T. DOA Estimation for Underwater Wideband Weak Targets Based on Coherent Signal Subspace and Compressed Sensing. Sensors. 2018; 18(3):902. https://doi.org/10.3390/s18030902
Chicago/Turabian StyleLi, Jun, Qiu-hua Lin, Chun-yu Kang, Kai Wang, and Xiu-Ting Yang. 2018. "DOA Estimation for Underwater Wideband Weak Targets Based on Coherent Signal Subspace and Compressed Sensing" Sensors 18, no. 3: 902. https://doi.org/10.3390/s18030902
APA StyleLi, J., Lin, Q. -h., Kang, C. -y., Wang, K., & Yang, X. -T. (2018). DOA Estimation for Underwater Wideband Weak Targets Based on Coherent Signal Subspace and Compressed Sensing. Sensors, 18(3), 902. https://doi.org/10.3390/s18030902