Compensation of Horizontal Gravity Disturbances for High Precision Inertial Navigation


Abstract
:1. Introduction
2. The Effect of DOV on Inertial Navigation System
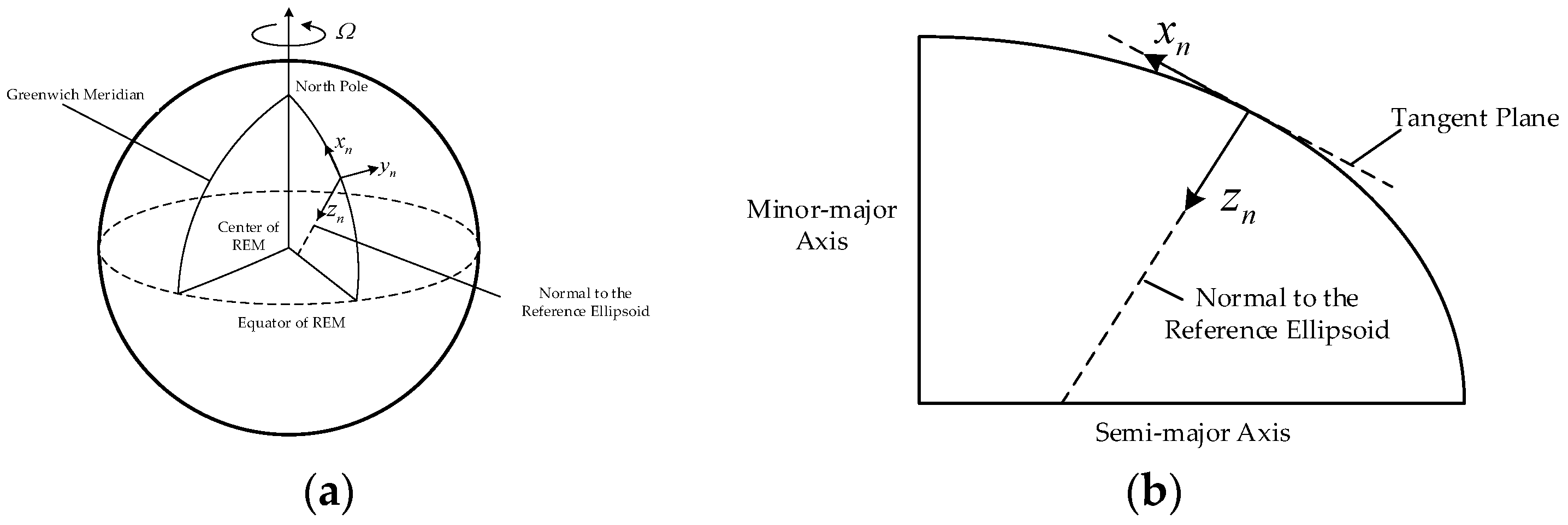
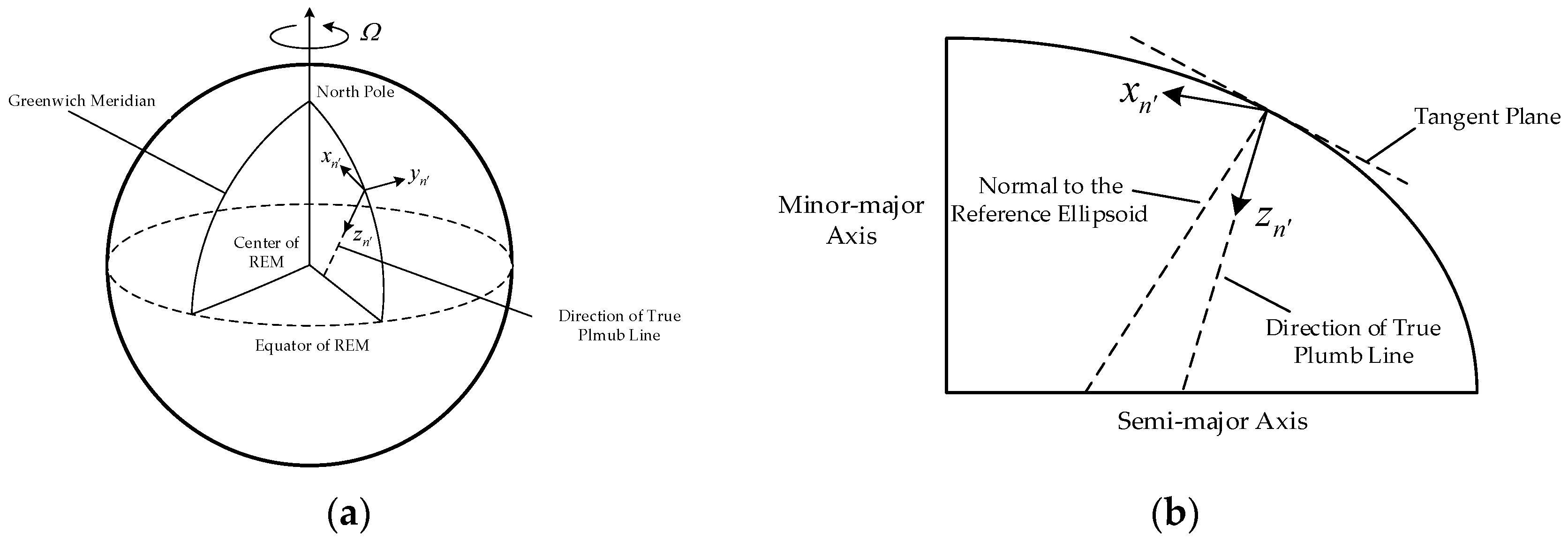
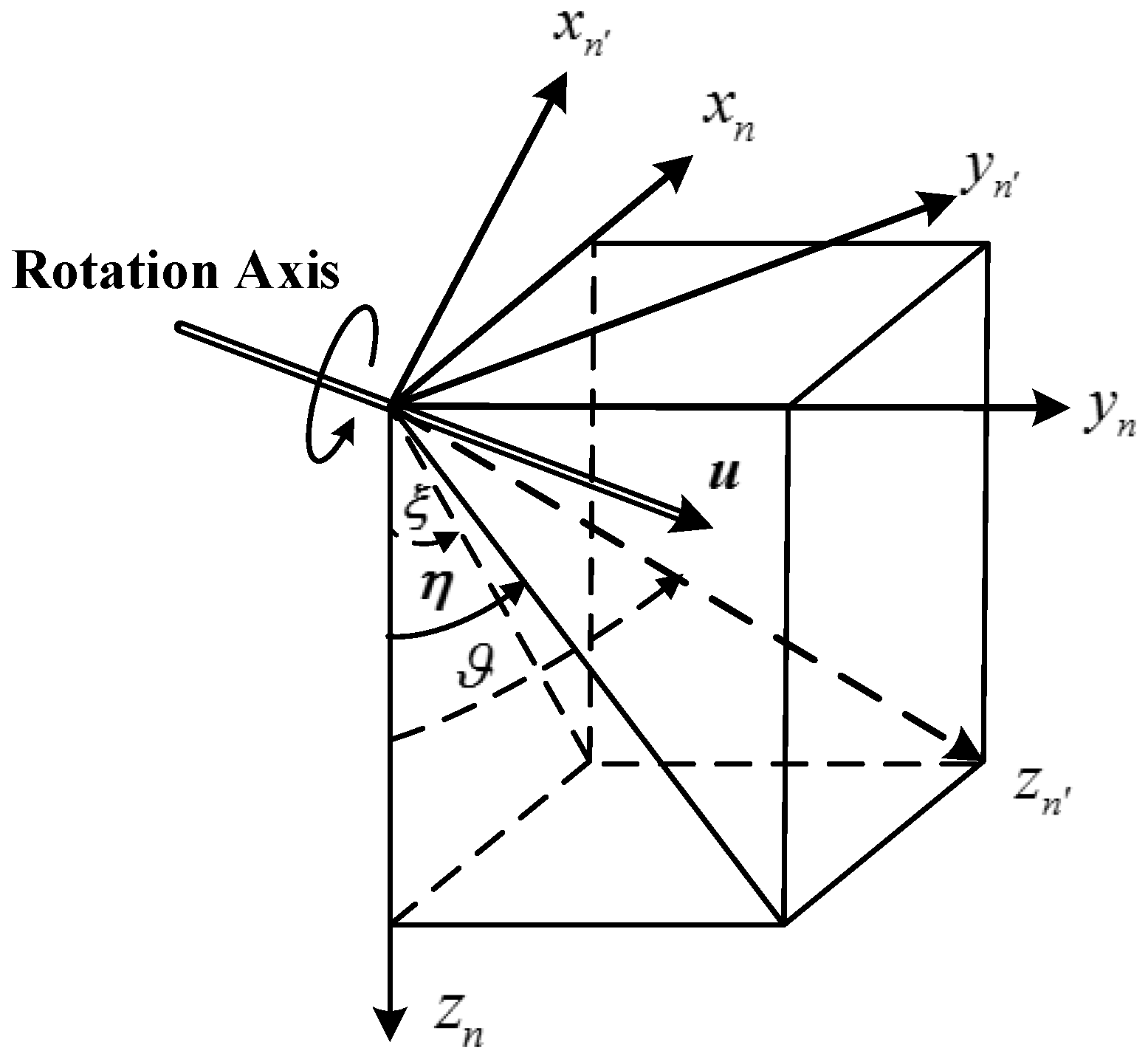
2.1. Reference Coordinate Frames
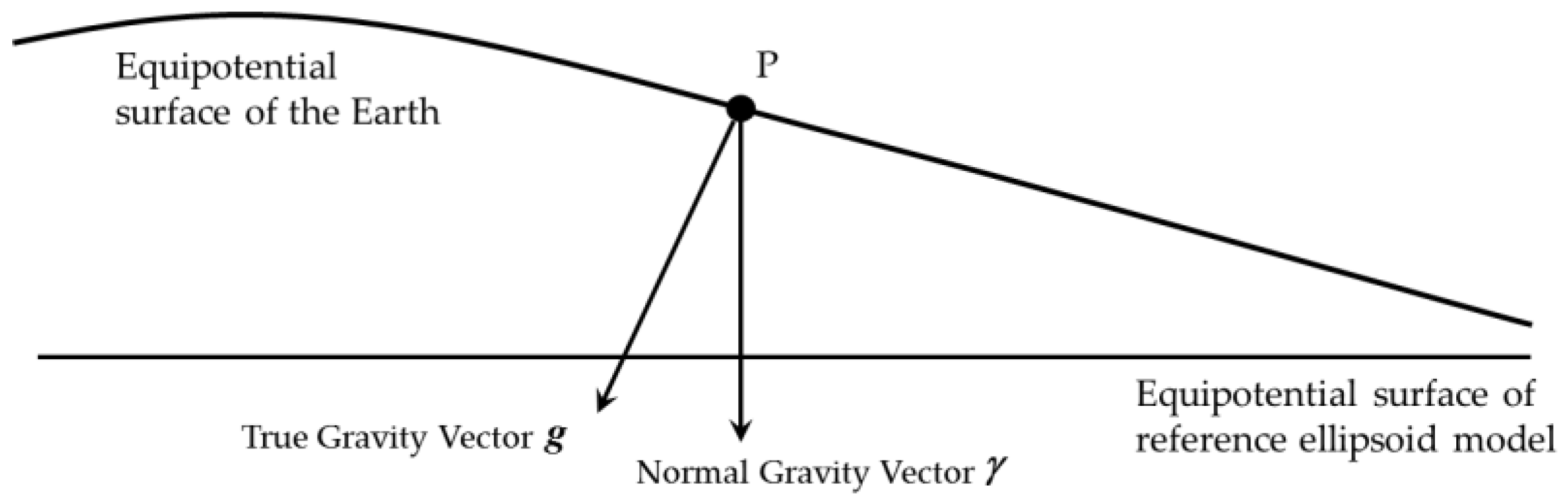
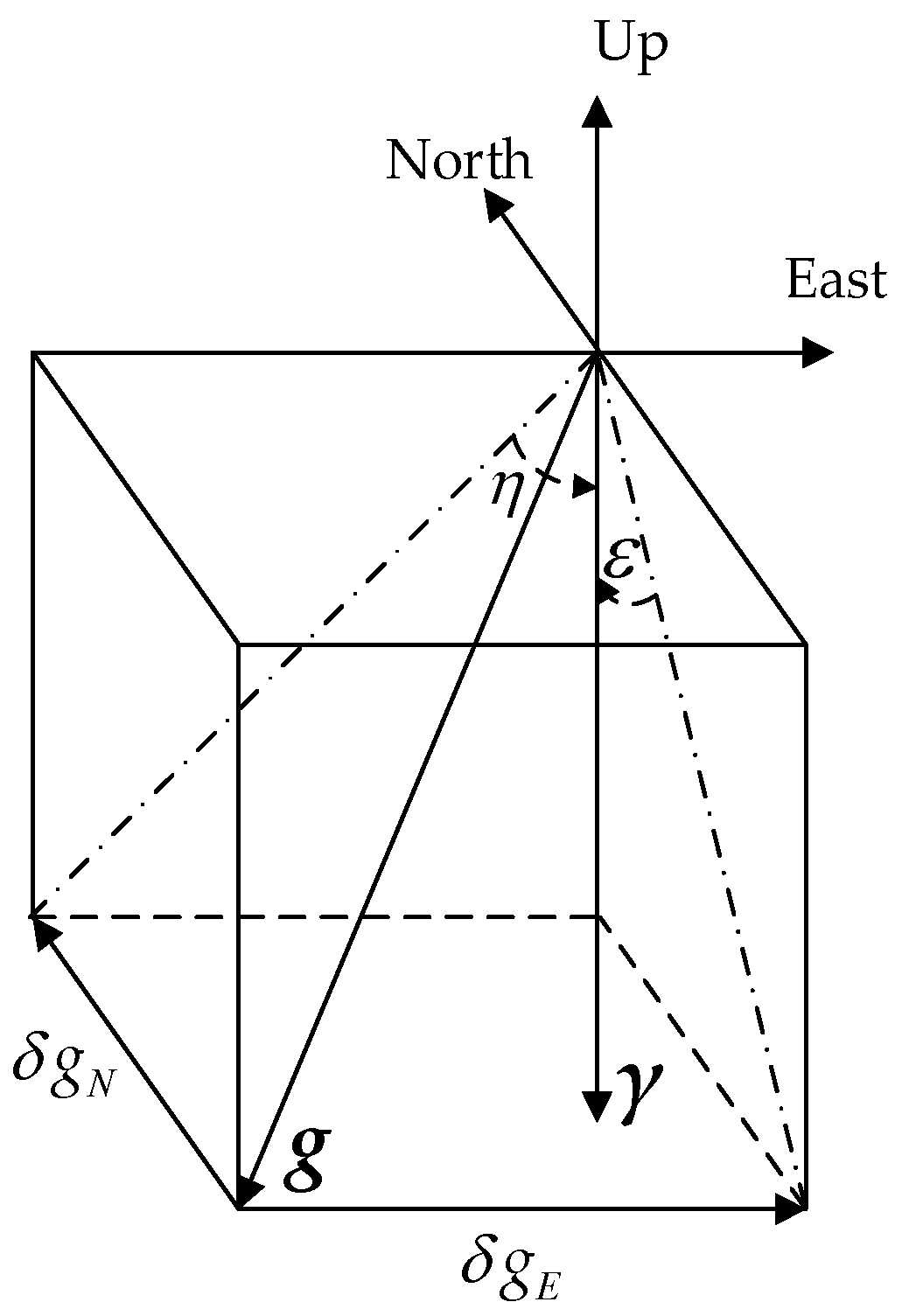
2.2. Definition of Horizontal Gravity Disturbance
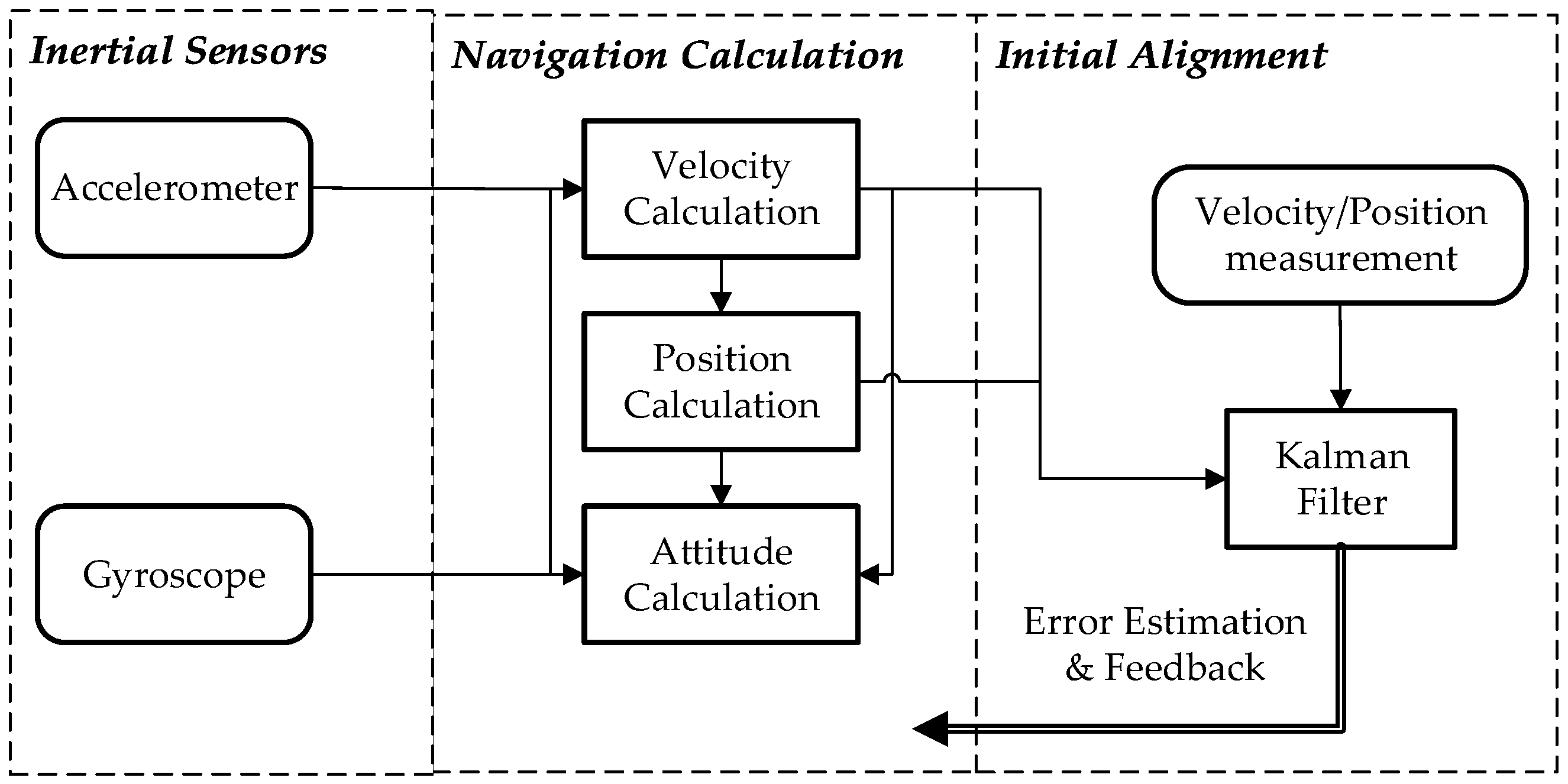
2.3. Formulas of INS
2.3.1. Attitude Calculation
2.3.2. Velocity Calculation and Position Calculation
2.3.3. Initial Alignment
2.4. Effect of Horizontal Gravity Disturbance on INS
- (I)
- The navigation coordinate frame built in the initial alignment must be consistent with the navigation coordinate frame in which the navigation calculation is implemented.
- (II)
- The vectors used in navigation calculation must be projected into the same navigation coordinate frame.
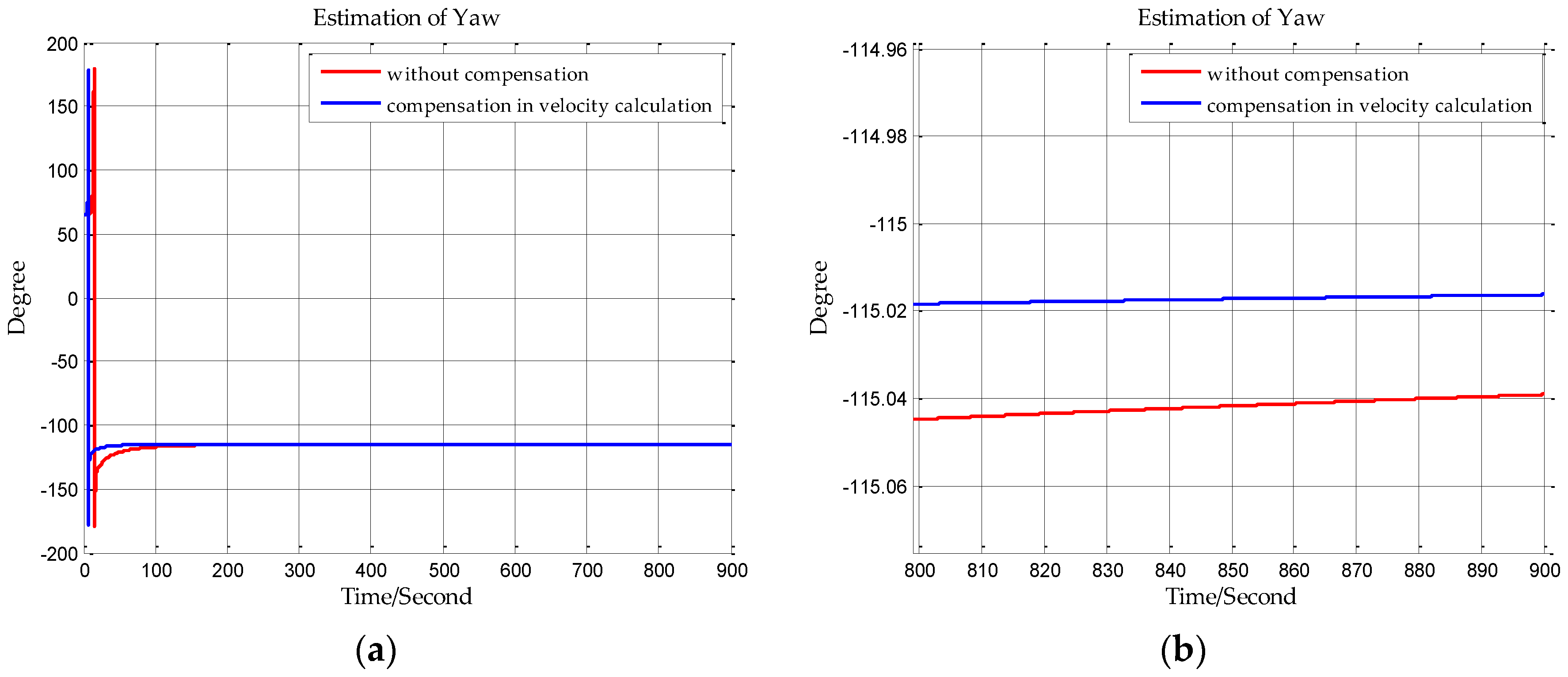
3. Compensation in Velocity Calculation
- (1)
- In the plane ;
- (2)
- Pass through the origin of the two coordinate frames;
- (3)
- Be orthogonal to the plane ;is the unit vector;
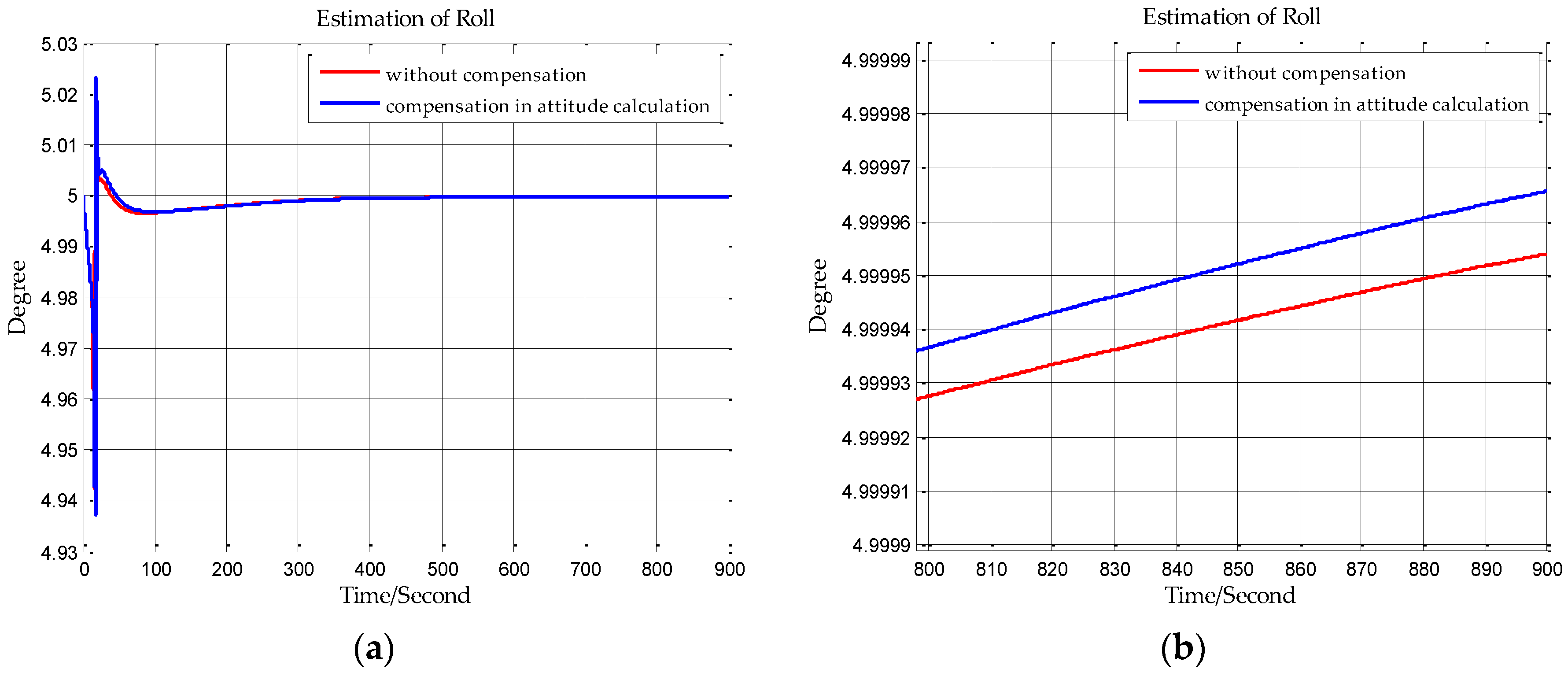
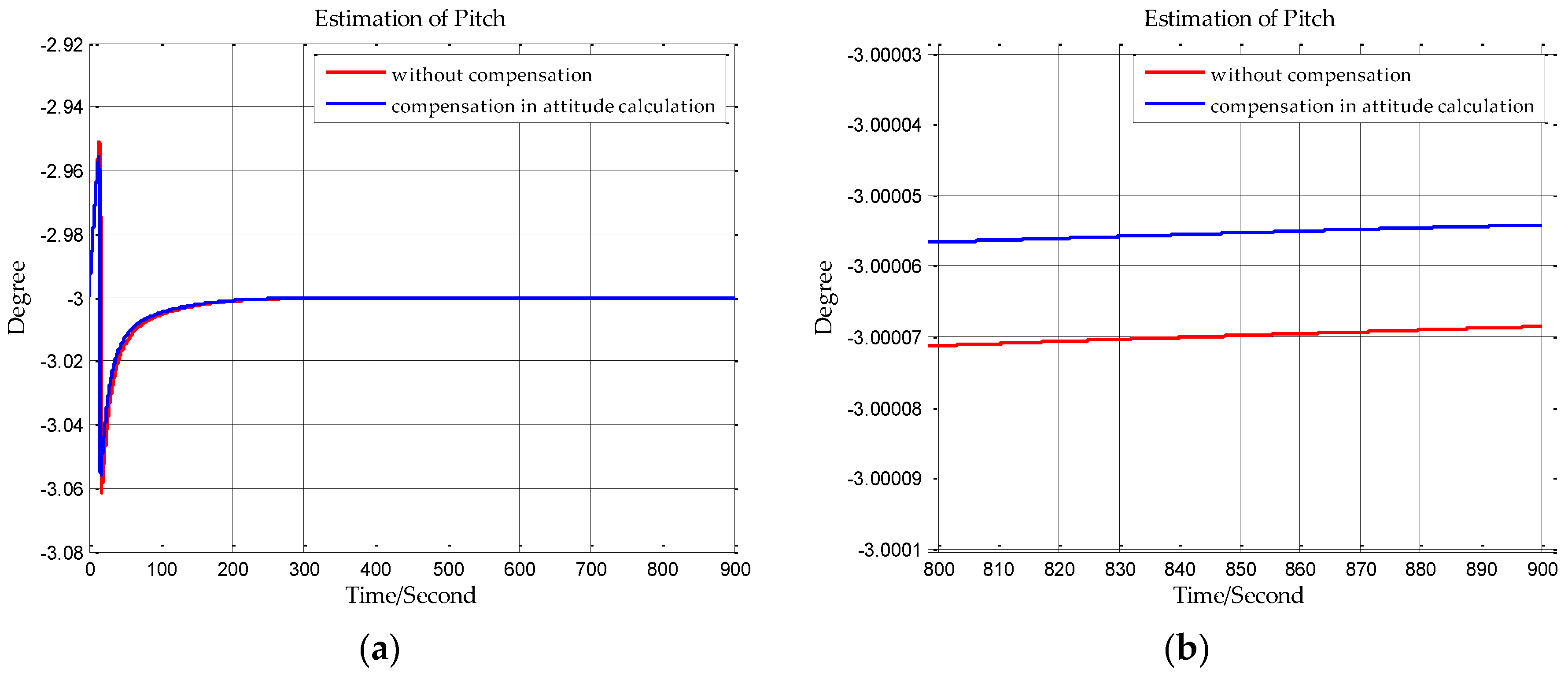
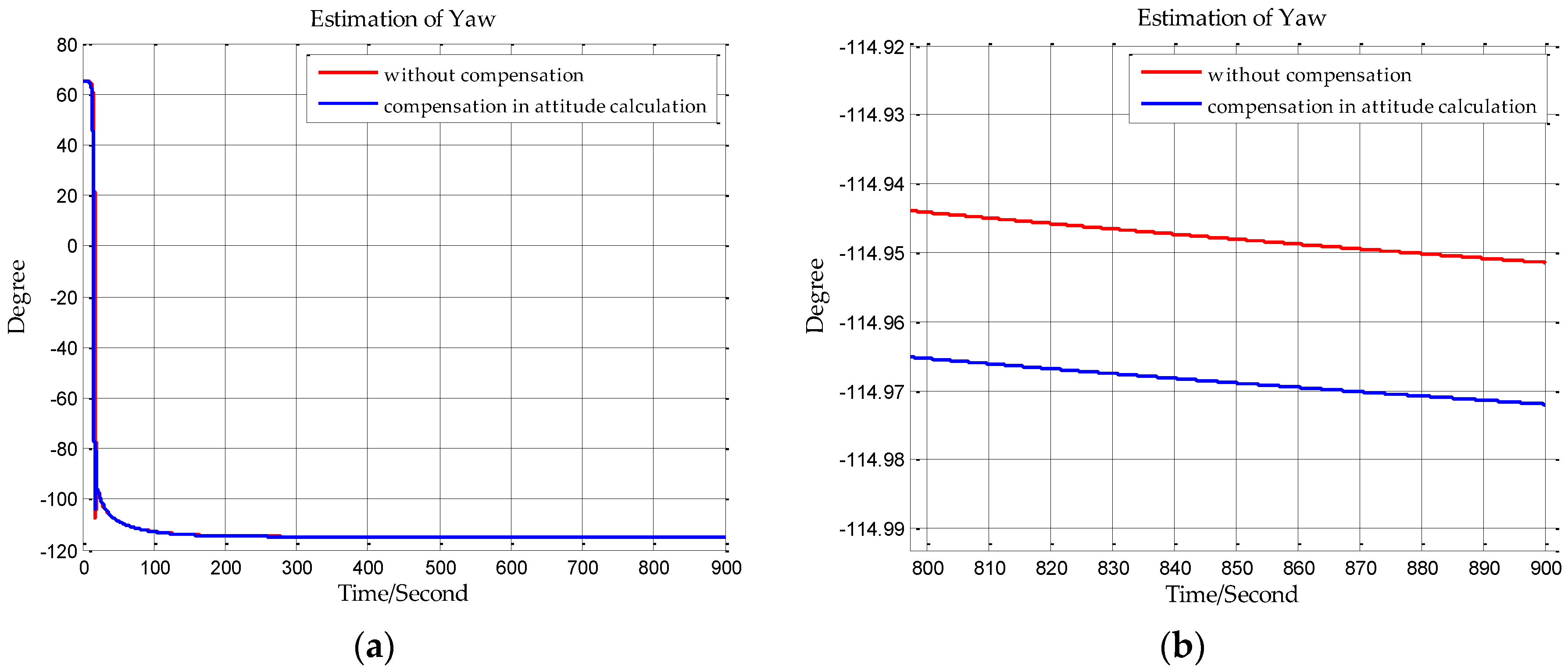
4. Compensation in Attitude Calculation
5. Simulation and Shipborne Inertial Navigation Experiment
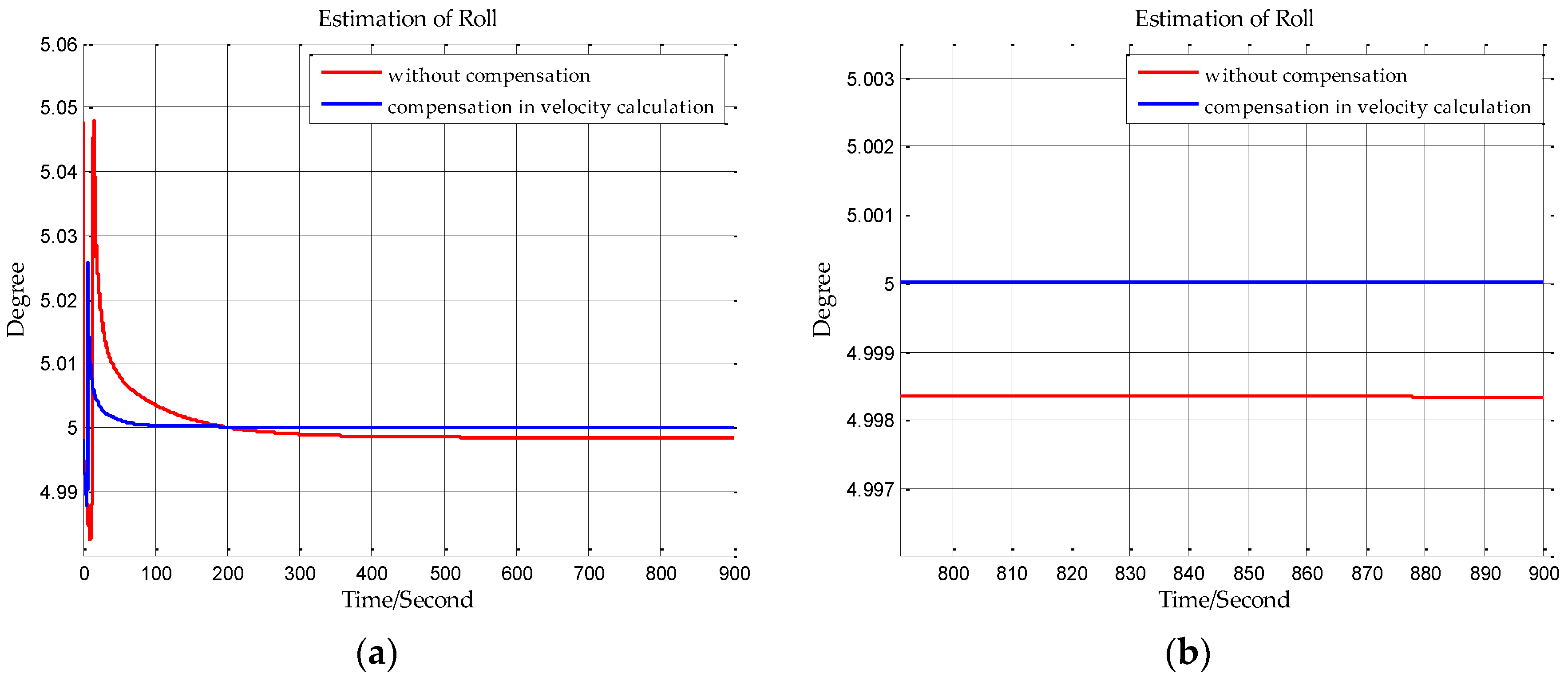
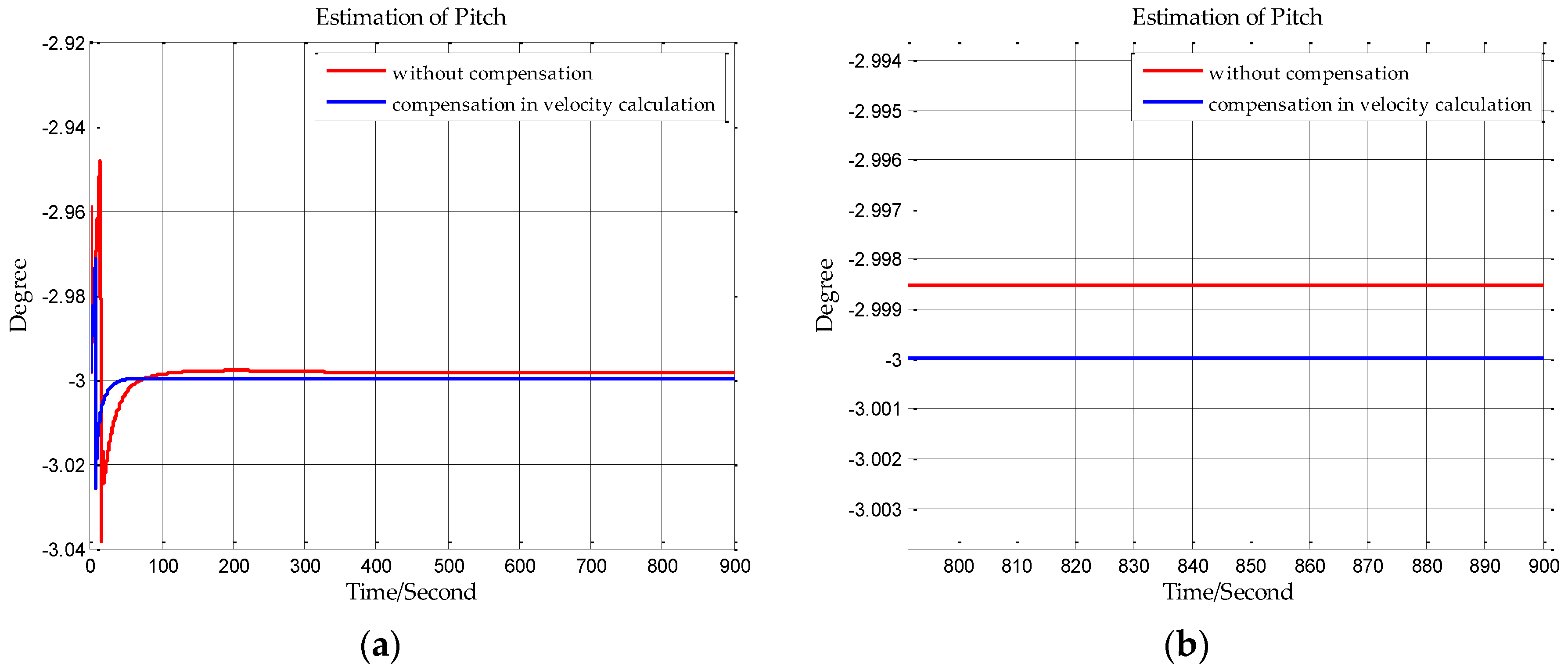
5.1. Initial Alignment Simulation
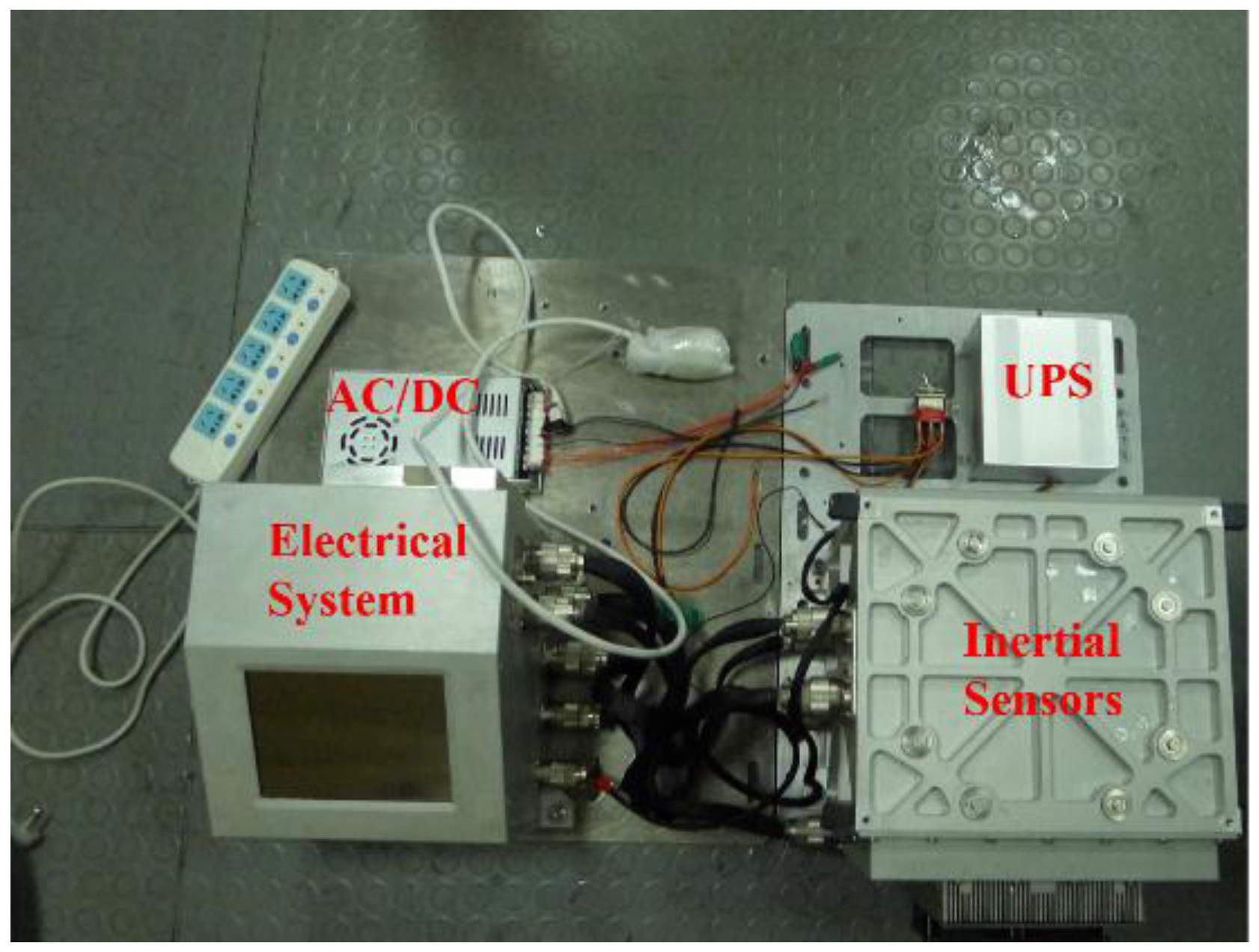
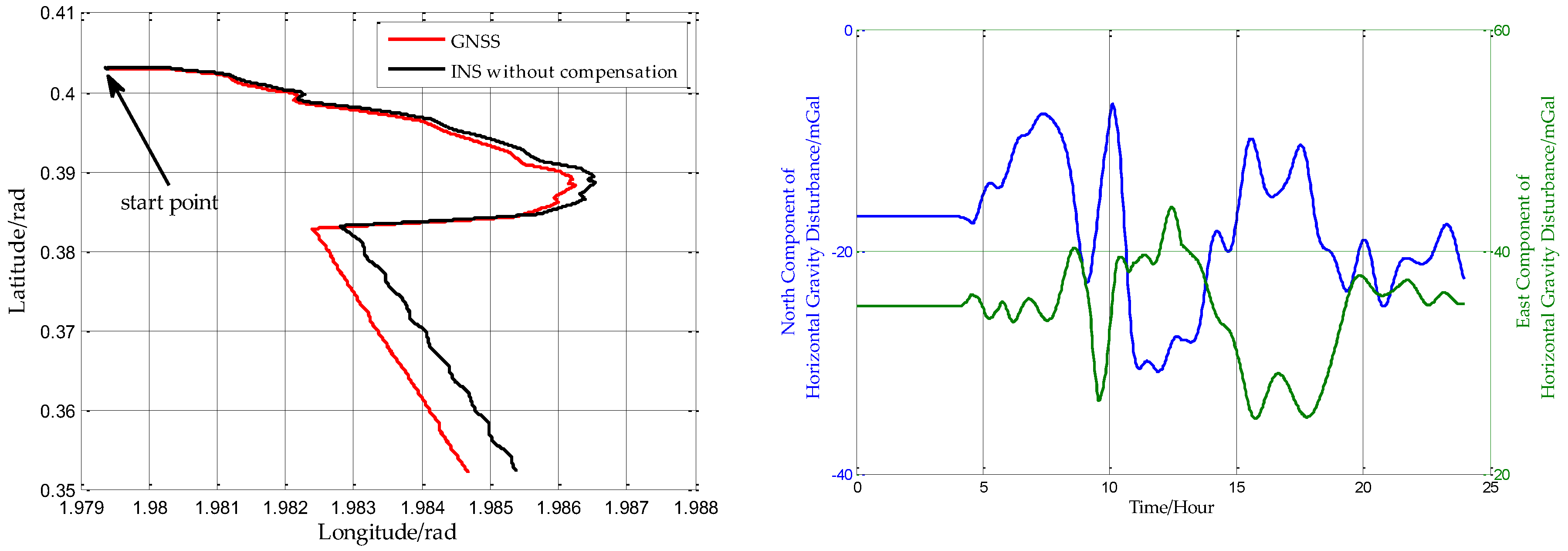
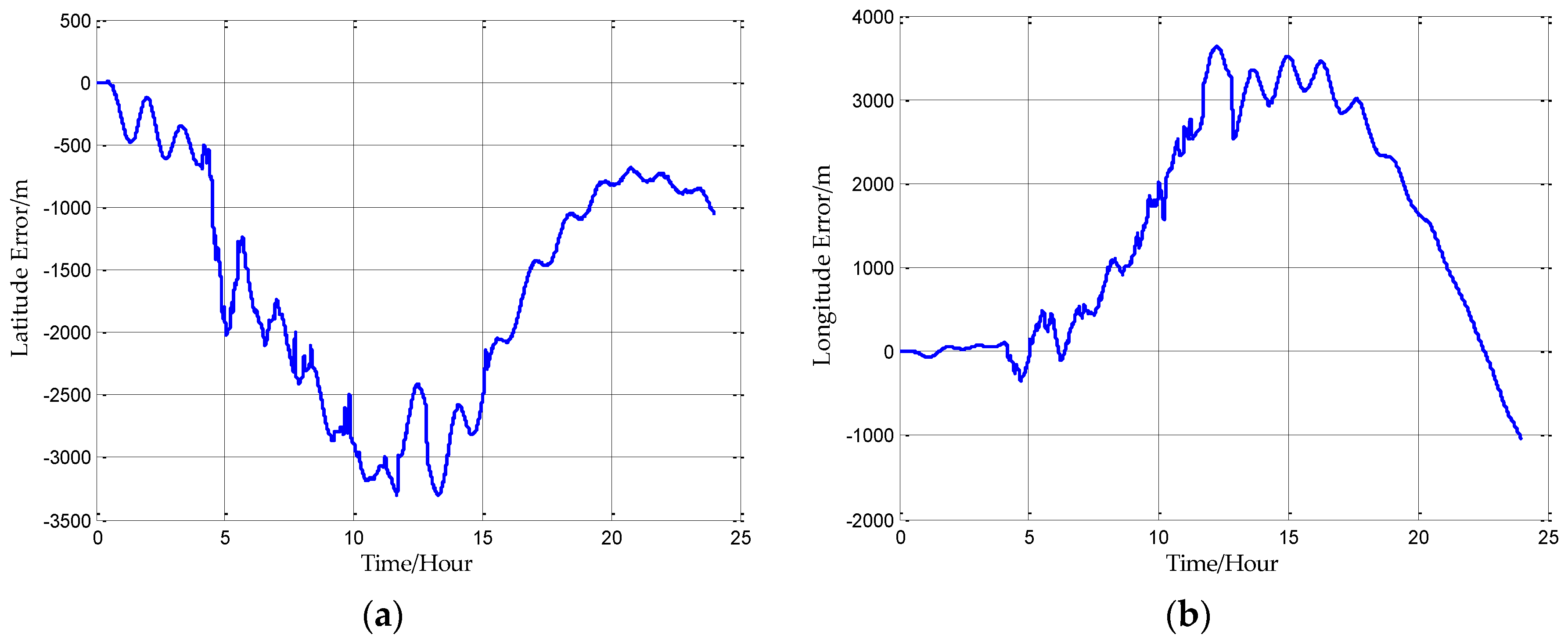
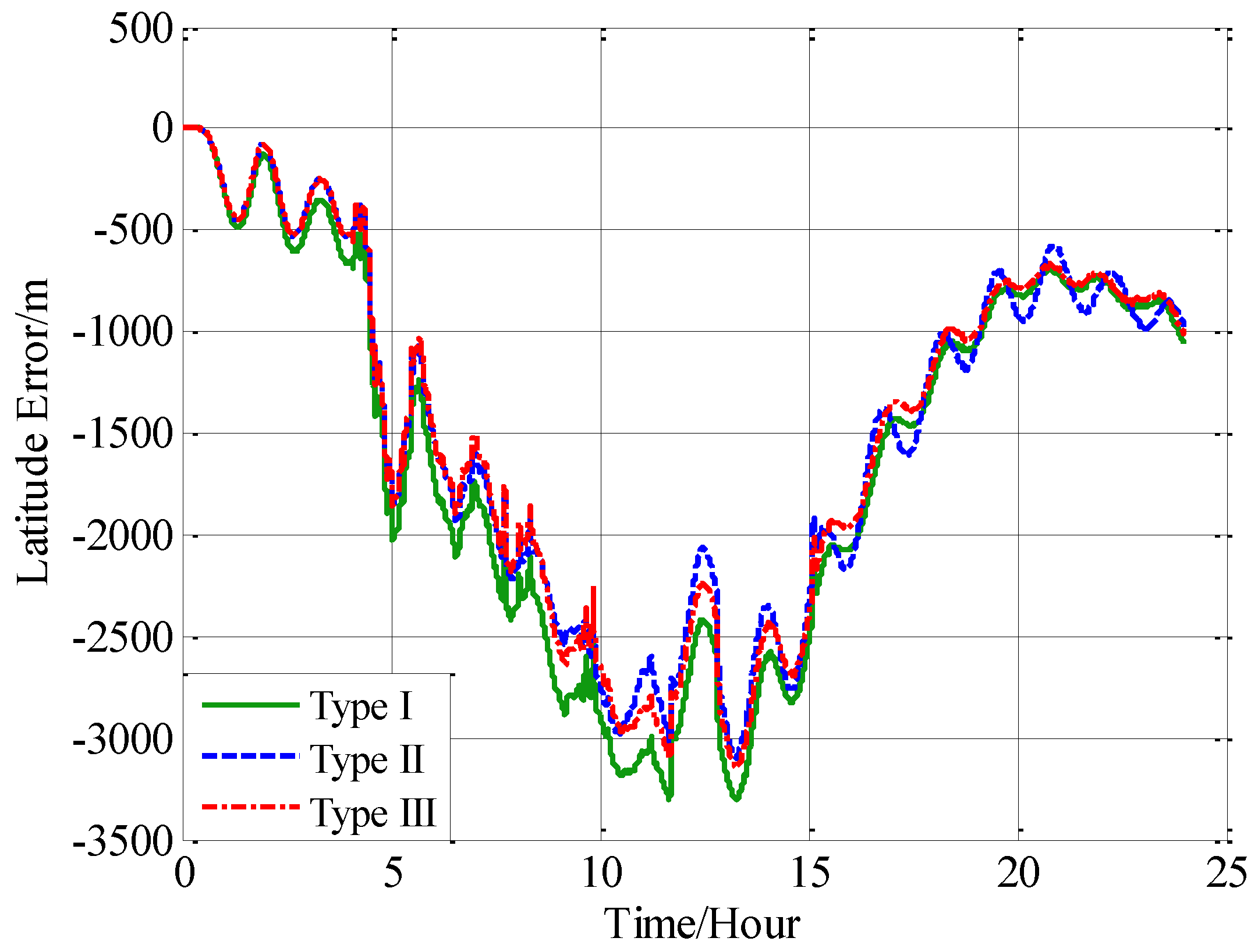
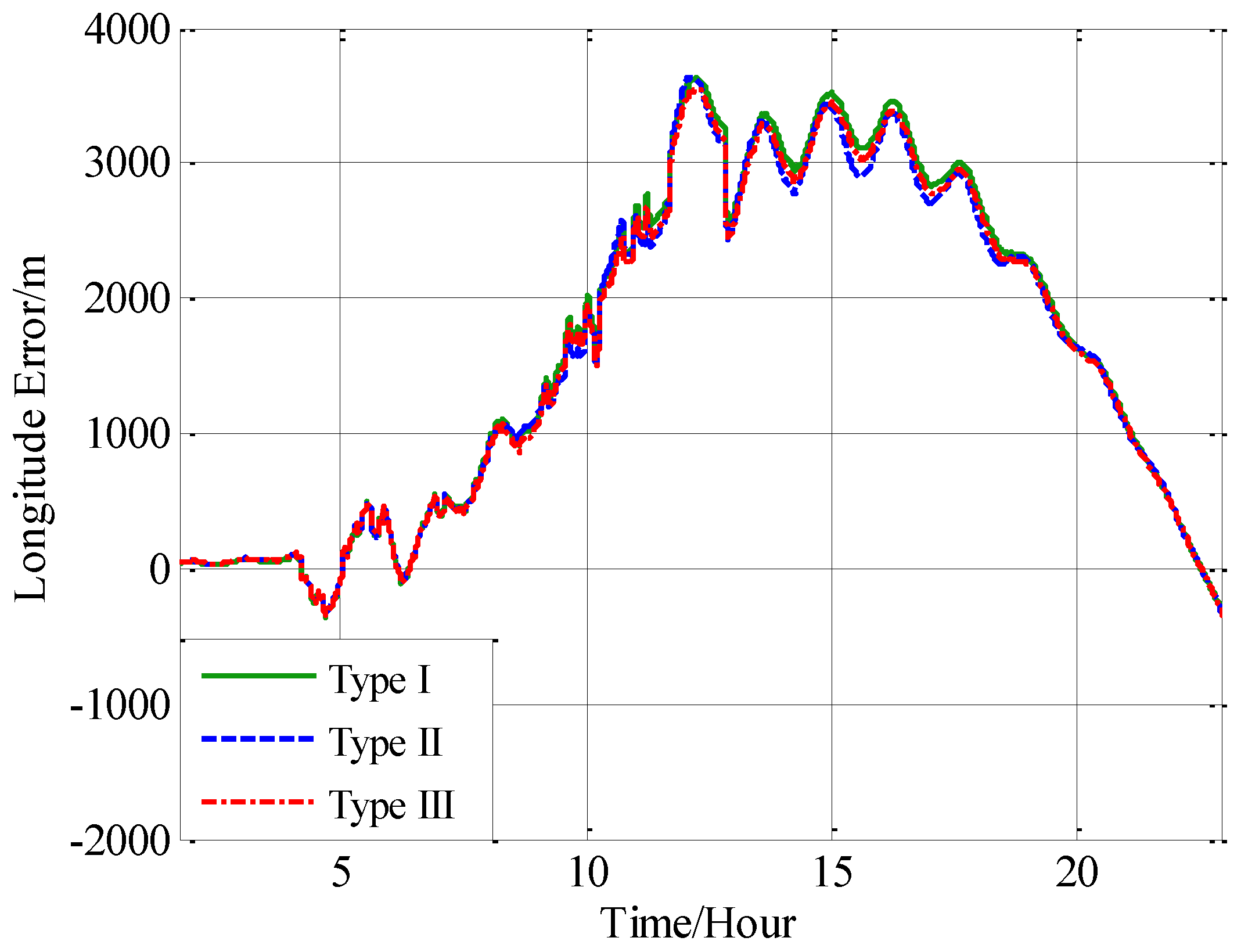
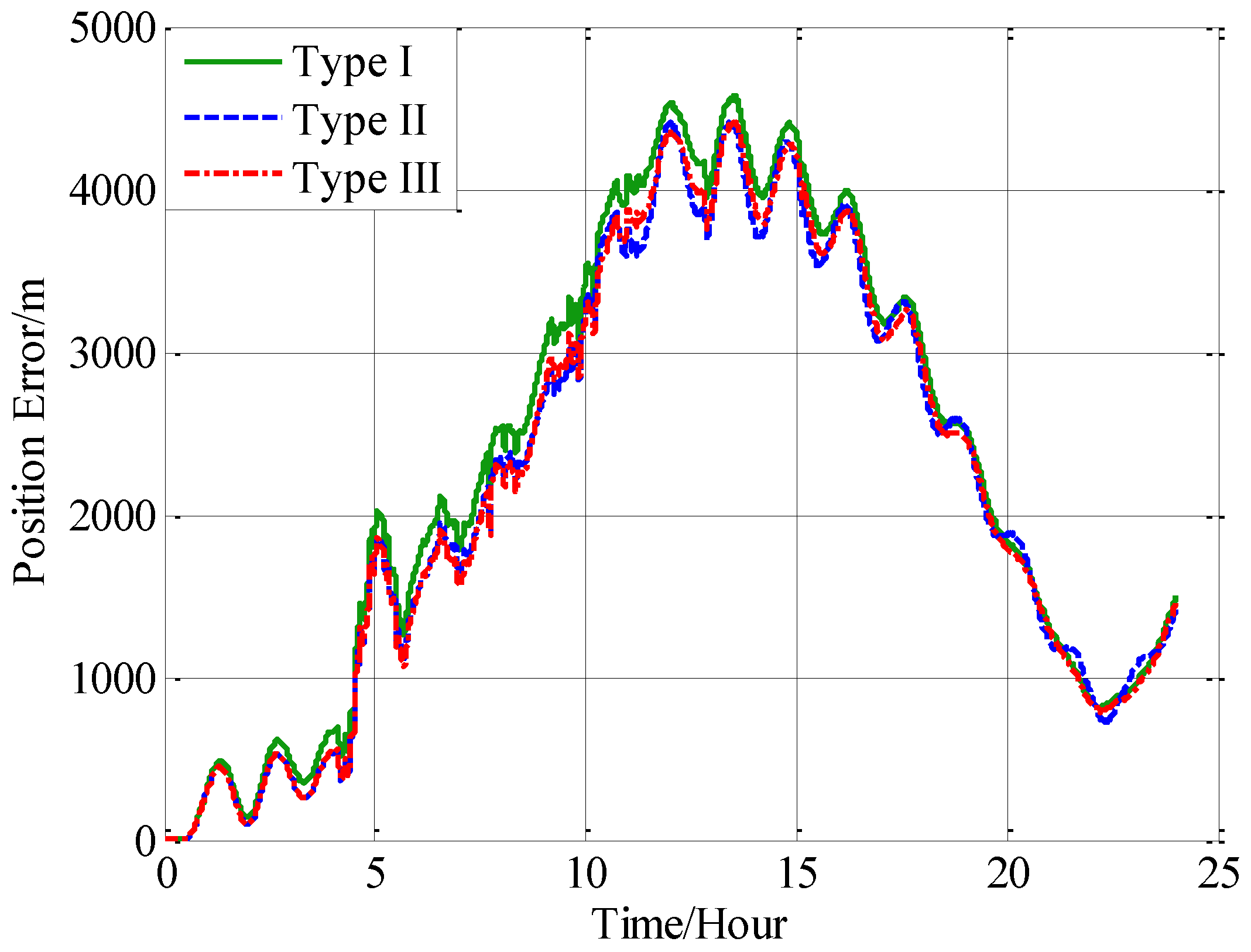
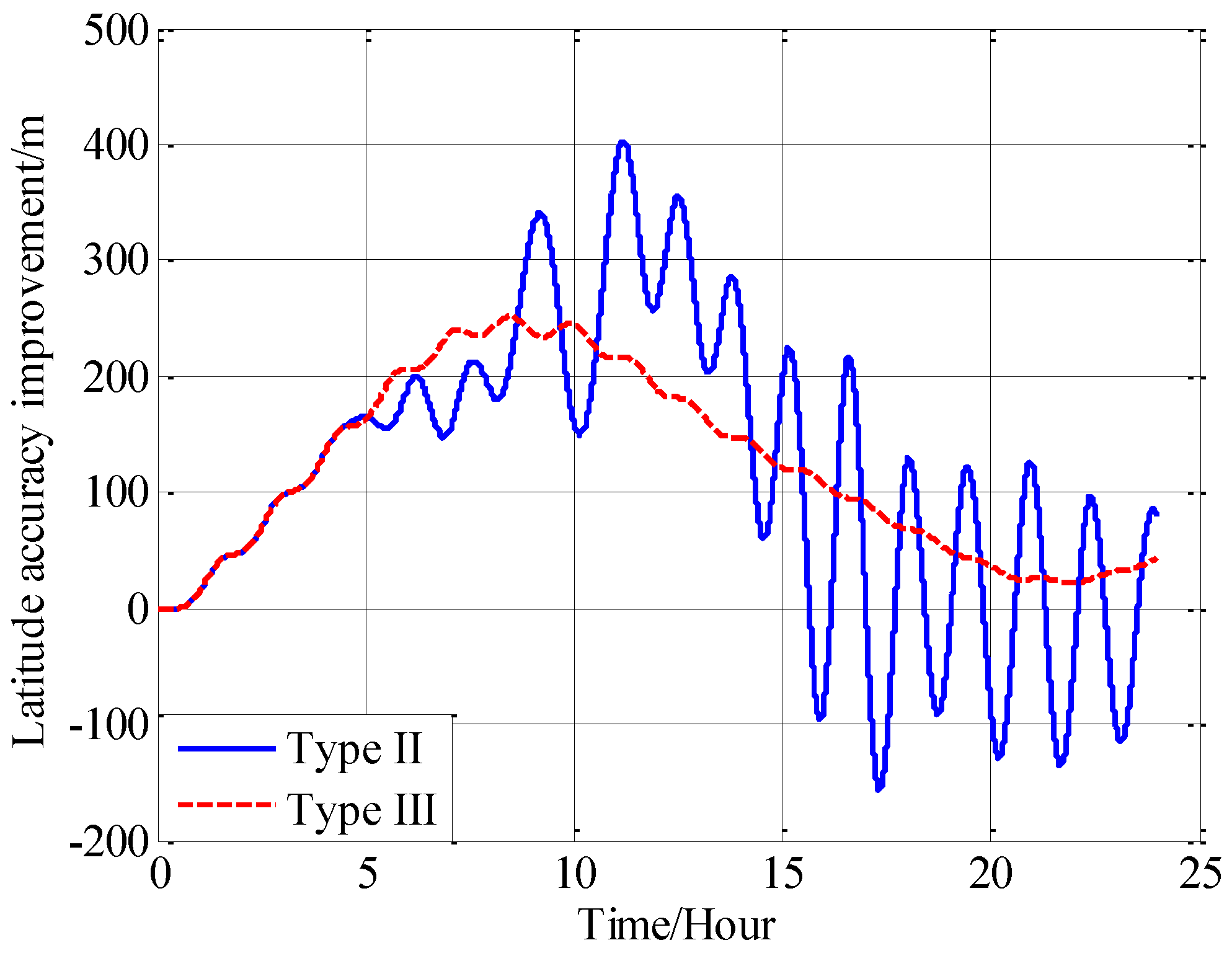
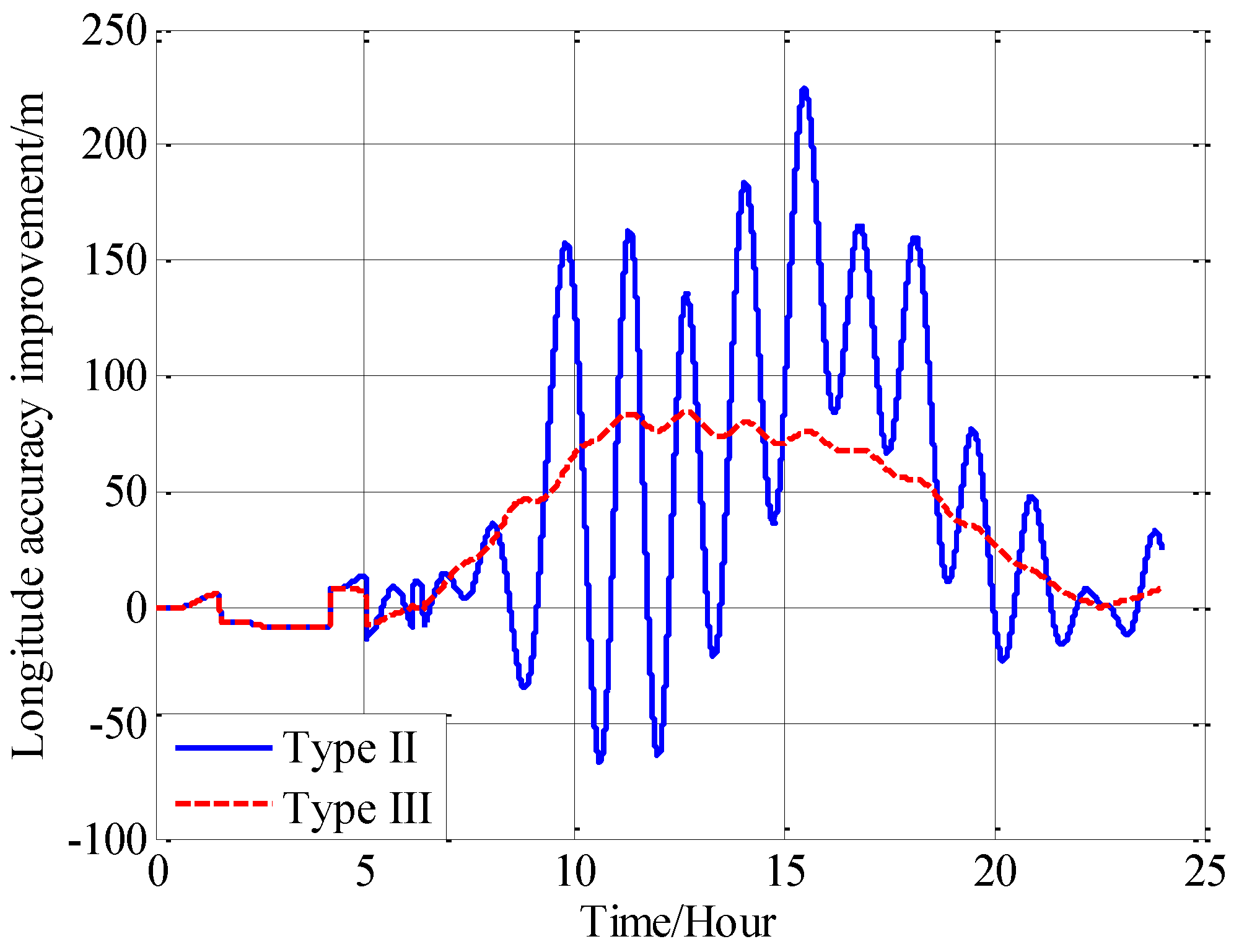
5.2. Shipborne Inertial Navigation Experiment
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Kwon, J.H.; Jekeli, C. Gravity requirements for compensation of ultra-precise inertial navigation. J. Navig. 2005, 58, 479–492. [Google Scholar] [CrossRef]
- Harriman, D.W.; Van Dam, C.C.P.G. Gravity-induced errors in airborne inertial navigation. J. Guid. Control Dyn. 1986, 9, 419–426. [Google Scholar]
- Hofmann-Wellenhof, B.; Moritz, H. Physical Geodesy; Springer: Vienna, Austria, 2009. [Google Scholar]
- Wang, J.; Yang, G.; Li, X.; Zhou, X. Application of the spherical harmonic gravity model in high precision inertial navigation systems. Meas. Sci. Technol. 2016, 27, 095103. [Google Scholar] [CrossRef]
- Zhou, X.; Yang, G.; Wang, J.; Li, J. An improved gravity compensation method for high-precision free-INS based on MEC–BP–adaboost. Meas. Sci. Technol. 2016, 27, 125007. [Google Scholar] [CrossRef]
- Gelb, A.; Levine, S.A. Effect of deflections of the vertical on the performance of a terrestrial inertial navigation system. J. Spacecr. Rocket. 1969, 6, 978–984. [Google Scholar] [CrossRef]
- Jordan, S.K. Self-consistent statistical models for the gravity anomaly, vertical deflections, and undulation of the geoid. J. Geophys. Res. 1972, 77, 3660–3670. [Google Scholar] [CrossRef]
- Shaw, L.; Paul, I.; Henrikson, P. Statistical models for the vertical deflection from Gravity Anomaly Models. J. Geophys. Res. 1969, 74, 4259–4265. [Google Scholar] [CrossRef]
- Welker, T.C.; Pachter, M.; Huffman, R. Gravity gradiometer integrated inertial navigation. In Proceedings of the 2013 European Control Conference (ECC), Zurich, Switzerland, 17–19 July 2013; pp. 846–851. [Google Scholar]
- Richeson, J.A. Gravity Gradiometer Aided Inertial Navigation within non-GNSS Environments. PhD Thesis, University of Maryland, College Park, MD, USA, 2008. [Google Scholar]
- Jekeli, C. Precision free-inertial navigation with gravity compensation by an onboard gradiometer. J. Guid. Control Dyn. 2006, 29, 704–713. [Google Scholar] [CrossRef]
- Pavlis, N.K.; Holmes, S.A.; Kenyon, S.C.; Factor, J.K. The development and evaluation of the earth gravitational model 2008 (EGM2008). J. Geophys. Res. Solid Earth 2012, 117, B04406. [Google Scholar] [CrossRef]
- Pavlis, N.K.; Holmes, S.A.; Kenyon, S.C.; Factor, J.K. An earth gravitational model to degree 2160: EGM2008. In Proceedings of the European Geosciences Union General Assembly, Vienna, Austria, 13–18 April 2008. [Google Scholar]
- Wu, R.; Wu, Q.; Han, F.; Liu, T.; Hu, P.; Li, H. Gravity compensation using EGM2008 for high-precision long-term inertial navigation systems. Sensors 2016, 16, 2177. [Google Scholar] [CrossRef] [PubMed]
- Zhou, X.; Yang, G.; Cai, Q.; Wang, J. A novel gravity compensation method for high precision free-INS based on “extreme learning machine”. Sensors 2016, 16, 2019. [Google Scholar] [CrossRef] [PubMed]
- Wang, J.; Yang, G.; Li, J.; Zhou, X. An online gravity modeling method applied for high precision free-INS. Sensors 2016, 16, 1541. [Google Scholar] [CrossRef] [PubMed]
- Titterton, D.; Weston, J.L. Strapdown Inertial Navigation Technology; Institution of Engineering and Technology: Stevenage, UK, 2004. [Google Scholar]
- Britting, K.R. Inertial Navigation Systems Analysis; Artech House: Norwood, MA, USA, 2010. [Google Scholar]
- Egm2008 Website. Available online: http://earth-info.nga.mil/GandG/wgs84/gravitymod/egm2008 (accessed on 1 May 2017).
- Li, W.L.; Wu, W.Q.; Wang, J.L.; Lu, L.Q. A fast SINS initial alignment scheme for underwater vehicle applications. J. Navig. 2013, 66, 181–198. [Google Scholar] [CrossRef]
- Groves, P. Principles of GNSS, Inertial, and Multisensor Integrated Navigation Systems, 2nd ed.; Emerald Group Publishing Limited: Bingley, UK, 2013. [Google Scholar]
- Bernstein, U. The effects of vertical deflections on aircraft inertial navigation systems. AIAA J. 1976, 14, 1377–1381. [Google Scholar]
- Hanson, P.O. Correction for deflections of the vertical at the runup site. In Proceedings of the 1988 Record Navigation into the 21st Century, Position Location and Navigation Symposium (IEEE PLANS ’88), Orlando, FL, USA, 29 November–2 December 1988; pp. 288–296. [Google Scholar]
- Wang, H.; Xiao, X.; Deng, Z.-H.; Fu, M.-Y. The influence of gravity disturbance on high-precision long-time ins and its compensation method. In Proceedings of the 2014 Fourth International Conference on Instrumentation and Measurement, Computer, Communication and Control, Harbin, China, 18–20 September 2014; pp. 104–108. [Google Scholar]
- Simon, D. The discrete-time kalman filter. In Optimal State Estimation; John Wiley & Sons, Inc.: New York, NY, USA, 2006; pp. 121–148. [Google Scholar]
- Grewal, M.S.; Weill, L.R.; Andrews, A.P. Inertial navigation systems. In Global Positioning Systems, Inertial Navigation, and Integration; John Wiley & Sons, Inc.: New York, NY, USA, 2006; pp. 316–381. [Google Scholar]






















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Given: Latitude, Longitude and Height of the Calculated Point |
|---|
| Step 1: Substitute Equation (13) into Equation (7) to calculate |
| Step 2: Substitute into Equation (8) to calculate |
| Step 3: Substitute and into Equation (9) to calculate |
| Step 4: Substitute into Equation (14) to calculate |
| Step 5: Substitute into Equation (15) to calculate |
| Inertial Sensor | Performance Units | Performance Ranges | ||
|---|---|---|---|---|
| High | Medium | Low | ||
| Gyroscope | degree/h | |||
| Accelerometer | ||||
| Units | Initial State | Initial Value | |
|---|---|---|---|
| Initial attitude | degree | roll | 5 |
| pitch | −3 | ||
| yaw | −115 | ||
| Initial velocity | m/s | North velocity | 0 |
| East Velocity | 0 | ||
| Downward velocity | 0 | ||
| Initial position | degree | latitude | 23 |
| degree | longitude | 113 | |
| m | height | 9.5 |
| Euler Angle | True Value | Without Compensation | Compensation in Velocity Calculation | ||
|---|---|---|---|---|---|
| Estimation Result | Estimation Error | Estimation Result | Estimation Error | ||
| Roll | 5 | 4.99834 | −0.00166 | 5.00002 | 0.00002 |
| Pitch | −3 | −2.99853 | 0.00147 | −2.99999 | 0.00001 |
| Yaw | −115 | −115.03915 | −0.03915 | −115.01628 | −0.01628 |
| Euler Angle | True Value | Without Compensation | Compensation in Attitude Calculation | ||
|---|---|---|---|---|---|
| Estimation Result | Estimation Error | Estimation Result | Estimation Error | ||
| Roll | 5 | 4.99979 | −0.00021 | 4.99981 | −0.00019 |
| Pitch | −3 | −3.00009 | −0.00009 | −3.00002 | −0.00002 |
| Yaw | −115 | −114.95142 | 0.04858 | −114.97197 | 0.02803 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tie, J.; Cao, J.; Wu, M.; Lian, J.; Cai, S.; Wang, L. Compensation of Horizontal Gravity Disturbances for High Precision Inertial Navigation. Sensors 2018, 18, 906. https://doi.org/10.3390/s18030906
Tie J, Cao J, Wu M, Lian J, Cai S, Wang L. Compensation of Horizontal Gravity Disturbances for High Precision Inertial Navigation. Sensors. 2018; 18(3):906. https://doi.org/10.3390/s18030906
Chicago/Turabian StyleTie, Junbo, Juliang Cao, Meiping Wu, Junxiang Lian, Shaokun Cai, and Lin Wang. 2018. "Compensation of Horizontal Gravity Disturbances for High Precision Inertial Navigation" Sensors 18, no. 3: 906. https://doi.org/10.3390/s18030906
APA StyleTie, J., Cao, J., Wu, M., Lian, J., Cai, S., & Wang, L. (2018). Compensation of Horizontal Gravity Disturbances for High Precision Inertial Navigation. Sensors, 18(3), 906. https://doi.org/10.3390/s18030906