1. Introduction
As its attractive characteristics such as efficiency, power density, torque-to-inertia ratio, reliability, etc., the application of permanent magnet synchronous motors (PMSM) on inertial stabilized platforms have been paid more and more attention. Usually, an airborne inertial stabilization photoelectric platform is equipped with visible or infrared cameras, and if we want to obtain stable and clear images, the stability of the platform must be high enough. However, due to the influence of inherent factors, such as the cogging torque of the permanent magnet synchronous motor, the torque ripples caused by the motor during operation seriously affects the performance of the motor. The torque ripples will also produce noise when the servo system is running at high speed and even cause the system to vibrate mechanically at low speed [
1,
2,
3].
There are several ways to weaken the torque ripple from the optimization design of the motor, and it is the most effective means, such as skew of the stator lamination stack or rotor magnetization, skewing and fractional slot pitch windings, increasing the number of phases, dummy slots, and dummy teeth, optimization of the air gap flux distribution, and the magnet pole arc width and position, etc. [
4]. However, optimizing the design of the motor usually makes it difficult to manufacture, and it will increase the cost significantly.
Active control is another method to reduce the torque ripple by changing the input current or voltage to achieve the desired torque output. Many scholars have performed a great deal of work in this area and have made many achievements. Thus, we can only achieve the purpose by changing the control strategy instead of the motor itself. No matter what way the PMSM is controlled, the controller is needed, so there is no extra cost. Additionally, by active control techniques, the design and manufacturing cycle of the motor can also be saved [
5,
6].
In previous works, Hung designed a torque ripple suppression strategy based on position compensation [
7]. However, the exact correspondence between the torque ripple and the position must be known if this method is used, otherwise the result may be worse. In fact, this is an open-loop compensation strategy. For closed-loop control, an effective way is to use torque transducer, but this will make the structure of control system more complex and increase the cost. The effect of the traditional PI control on the torque ripple caused by the mechanical parts (e.g., cogging torque and load oscillations) is also not satisfactory. Iterative learning control is used in [
8,
9,
10], it gradually eliminates periodic torque ripples by iteration. This is indeed an effective way to eliminate the periodic torque ripples of the PMSM, but it is not suitable on the optoelectronic stabilization platform. Since the motion of the aerial photoelectricity platform is usually random and works at a low speed.
SMC is a popular nonlinear method for PMSM control [
11,
12,
13,
14,
15]. As the sliding mode can be designed and independent of the object parameters and disturbances, SMC has the advantages of quick response, insensitivity to parameter changes and disturbances, no on-line identification, and simple physical realization. In particular, it is a very attractive aspect of the invariance to the disturbance [
16]. Sliding mode variable structure control has also been successfully applied in many fields [
17,
18,
19,
20,
21]. However, the invariance of the sliding mode variable structure control to the parameter perturbation and external disturbance of the system is changed by the high-frequency jitter of the control quantity.
Therefore, in this paper, on the basis of the design of a robust sliding mode controller, a disturbance observer is introduced to reduce the switching gain, so that the buffeting effect of the system can be weaken. The two-order derivative of the signal is usually needed in the sliding mode controller, but the use of speed sensors or accelerometers will make the system complex and increase the cost significantly. The traditional differential method is divided into two main types: one is to calculate the change of signal in unit time, or to calculate the time used by the unit change quantity. However, the traditional differential method is not ideal. Although the Kalman filter and the dual-sampling-rate observer are presented, they are also limited in practice for the model needs to be known, while we cannot always obtain the accurate model of the system [
22,
23,
24]. A fast-nonlinear tracking differentiator for practical application of engineering is discussed in [
25]. The problem of the phase lags of the differentiator has been considered and a feedforward is used to improve the differential estimate by extends the traditional structure and provides an additional freedom for the design of NTD [
26]. It improves the accuracy of the differential estimate compared with the traditional method and is suitable for engineering practice.
This paper is organized as follows. In the second part, the mathematical model of PMSM is established. The scheme of a robust SMC based on rapid NTD and DOB is introduced in three sections in the third part, where the convergence of the method and the control structure of the whole system are also given in this part.
Section 4 introduces the construction of the experimental platform for PMSM. In
Section 5, the effectiveness of the proposed robust SMC scheme is proved by experiments, and the results are discussed. The last part of the article gives the conclusion.
2. Mathematical Model of PMSM
In order to simplify the mathematical model of three phase PMSM in the natural coordinate system, the coordinate transformation usually includes static coordinate transformation (Clark transformation) and synchronous rotation coordinate transformation (Park transformation). The relationship between them is shown in
Figure 1, in which ABC is a natural coordinate system,
, is a stationary coordinate system, and
is a synchronous rotating coordinate system.
The coordinate transformation of the natural coordinate system ABC to the stationary coordinate system
is the Clark transformation. According to the relationship between the various coordinate systems shown
Figure 1, the formula is as follows:
Among them,
is the variable of motor voltage, current or magnetic chain, and
is the coordinate transformation matrix, which can be expressed as follows:
where the coefficient
is obtained according to the amplitude as the constraint condition. When the power constant is used as the constraint condition, the coefficient becomes
.
The coordinate transformation of the stationary coordinate system
to the synchronous rotating coordinate system
is the Park transformation:
where
is the coordinate transformation matrix, which can be expressed as follows:
According to the above relationship, the transformation relationship between the transformation of the natural coordinate system ABC to the synchronous rotating coordinate system
can be obtained:
is the coordinate transformation matrix, which can be expressed as follows:
where
is the top two rows of
.
It is necessary to point out that for a three-phase symmetric system, the zero-sequence component can be ignored when calculating.
In order to facilitate the design of the controller, we choose the mathematical model under the synchronous rotating coordinate system
[
27,
28]. The stator voltage equation is as follows:
The stator flux equation is as follows:
Then we can get a new stator voltage equation:
where
and
are the stator voltage along the
and
axes, respectively,
and
are the stator current along the
and
axes, respectively,
is the stator resistance,
and
are the stator flux linkages along the
and
axes, respectively,
is the electrical angular speed,
and
are the inductances along the
and
axes, respectively, and
are the flux linkages of the permanent magnet.
According to the Equation (9), we can find that the mathematical model of PMSM is fully decoupled. Then we can get the electromagnetic torque equation:
Equations (7)–(10) are the mathematical model for the built-in PMSM, and for the surface mounted PMSM, the stator inductance
. Then we can obtain:
where
is the electromagnetic torque,
is the number of pole pairs and
is the torque coefficient. The equation of PMSM dynamic is:
where
is the inertia,
is the mechanical angular speed,
is the load torque, and
is the viscous frictional coefficient.
In fact, the above model is only obtained under ideal conditions. Parasitic torque pulsations exist in PMSM due to the non-sinusoidal flux density distribution around the air gap, errors in current measurements, and variable magnetic reluctance of the air gap due to the stator slots [
8]. The speed of the motor will oscillate as a result, especially at low operating speeds. Therefore, to reduce the speed ripples, an appropriate control strategy is needed to minimize the torque ripple.
3. Design of Robust Sliding Mode Control
3.1. Robust Sliding Mode Control
SMC is essentially a kind of nonlinear control method, and its nonlinearity expressed as the discontinuity of the control variables. The difference between SMC and other control strategy is that the “structure” is not fixed. SMC can change according to the current state (such as the error and its derivative) of the system in the dynamic process, forcing the system to move in accordance with the state trajectory of a predetermined “sliding mode”. Following is the robust SMC strategy used in this paper.
According to Equation (12), we can obtain the mathematical model of the PMSM:
where
is the system lumped disturbance, and
is the mechanical angular. In order to facilitate the subsequent deduction, we use
to represent
, to represent
, and remove the subscripts of
:
Without loss of generality, suppose that the parameters and are bounded, .
The control objective is
, and we select the following sliding mode function [
29]:
where
, and
is the saturation error function, we define that:
of which
is an arbitrary constant:
Then we can get following properties of
and
:
According to the above formula, we can obtain:
and:
Multiplied by
on both sides of Equation (20) yields:
Then we can get the following sliding mode controller:
The following is a proof of its large scale asymptotic stability.
According to Equations (21) and (22):
Multiplied by
on both sides of Equation (23) yields:
where:
According to Equation (18), the positive definite functions
and
can be defined as follows:
where
, then
can be expressed as:
At last, if Lyapunov function is selected as follows:
then:
Therefore, if
and
, the following result can be obtained:
As is positive definite, so is negative definite. Therefore, the stability of the system and the gradual stability of large range can be guaranteed by the sliding mode controller .
Further using the boundary layer method to improve the control law yields:
where:
The overall block diagram of the robust sliding mode control is shown in
Figure 2. The field-oriented control (FOC) method is utilized to control the PMSM. The robust sliding mode controller is employed as the speed controller to generate the
-axis reference current
. In order to obtain maximum electromagnetic torque,
is always assigned to zero.
is measured by an image tracker,
and
are measured by a gyroscope and an encoder, respectively.
3.2. Disturbance Observer
In the above proof we notice that the switching gain
needs to be greater than
. Generally,
and
can be obtained or estimated from actual system, but we cannot obtain the exact values of
, because it is not only related to the parameters of the motor itself, but also many factors, such as the tightness of the mechanical installation and the disturbance caused by the cable, and so on. In order to make the system stable, we usually use a high gain, but excessive gain will easily cause the chattering of the system. Thus, a natural idea is that if we observe the disturbance and compensate it in the system, the buffeting effect of the system can be greatly reduced. Equation (14) can be drawn as
Figure 3.
where
, a typical DOB based on the nominal model is shown in
Figure 4 [
30].
where
is the nominal model of practical system, and
is its inverse model,
is a low-pass filter, and
is the measurement noise.
This structure uses the inverse of the nominal model to estimate the disturbance, but the relative order of the model is generally greater than one, so it is not physically possible. Additionally, the effect of measurement noise will affect the observation precision. To solve this problem, the inverse of the model can be multiplied by a low-pass filter. According to the relative order of the nominal model above, we can design the low-pass filter as the form of the typical two order system, so that the relative order of the product by the inverse of the model and the low-pass filter will be equal to zero, thus avoiding the direct differentiation of the measured signal. The DOB after structural transformation is shown as shown in
Figure 5.
Thus, after obtaining , the upper bound of can be determined approximately. Then the minimum switch gain simply needs to satisfy to guarantee the system stability and robustness. This means that the DOB can reduce the minimum switching gain and, thus, reduce the buffeting of the system on the premise of assurance of system robustness.
3.3. Rapid Nonlinear Tracking Differentiator
Note that the derivative of the signal is contained in the robust sliding mode control designed above. There are usually no corresponding sensors in the actual system. To obtain the approximate differential of a signal, a nonlinear tracking differentiator (NTD) is a good solution [
25,
26], as it makes use of the principle of signal tracking and guarantees the quality of the differential. Guo, B.-Z. and Zhao, Z.-L. give the general form of the NTD and gives a proof of it [
31].
Suppose that the equilibrium point (0,0) of the following system is globally asymptotically stable:
among which
is a locally Lipschitz continuous function and
.
and
are the initial value. If the differential needed signal
is differentiable and
, then the following tracking differential:
is convergent in the sense that: for every
,
is uniformly convergent to
on
as
, where
and
are any given initial value. The selection nonlinear function
in (36) is a key problem which is also the focus of previous research.
However, [
25] pointed out that there are always serious phase lags in the output no matter how the nonlinear function is designed. Thus, the NTD with feedforward is proposed to improve the rapidity:
where
is a constant. A detailed proof is given in [
25]. According to ([
25], Remark 3.1), there is no need for
in the implementation of the NTD, although the wanted signal differential
appears in Equation (37).
In this paper, we make a slight improvement to Equation (37):
To reduce the impact of the noise of the input signal , a low-pass filter is added to the feedforward. The cutoff frequency of the can be designed according to the specific requirements of the practical system.
Thus, the block diagram of proposed robust sliding mode controller based on rapid NTD and DOB can be employed, as shown in
Figure 6.
It is worth noting that the input signal of the NTD is acquired by adding and , and the output signal of the NTD is . is obtained by subtracting from .
5. Experimental Results and Discussions
To verify the effectiveness of the proposed robust SMC scheme in this paper, experiments are carried out under different strength sinusoidal disturbance conditions added by the swing platform, including
,
,
, and
(unit: degrees). The following three methods are compared in the experiment: The traditional PI method, the robust SMC with differentiator using the Euler method, and the robust SMC with NTD. Based on the Z-N method [
32], the parameters of traditional PI method are chosen as
,
; the parameters of the robust sliding mode controller are
,
,
,
;
is determined to be 0.1 through multiple attempts; The parameters of the disturbance observer are:
where the cut-off frequency
is set to be
, and the damping coefficient
is set to be 0.7. The approximate current loop model
is acquired by sweeping frequency.
The parameters of the rapid NTD are selected by referring to [
25], the nonlinear function
is selected as:
where
,
,
, and
, and the low pass filter
is in the same form with
, but
rad/s.
Additionally, the traditional PI method is adopted in the current loop of the PMSM driver, and the parameters of the three methods are all the same: -axis PI parameters: and . -axis PI parameters: and . In order to compare the performance of the three control algorithms more fairly, the actual measurement is carried out when parameters are set, so that the measured bandwidth of the system is kept as consistent as possible, which is about 30 Hz (−3 dB).
In order to demonstrate the ability of the proposed method under different disturbance conditions, experiments are carried out in the tracking mode. By analyzing the data of the gyroscope, the inertial stability performance of the system can also be analyzed.
The experimental results of the PI, robust SMC with Euler, and robust SMC with NTD under the disturbance
are shown in
Figure 9,
Figure 10 and
Figure 11.
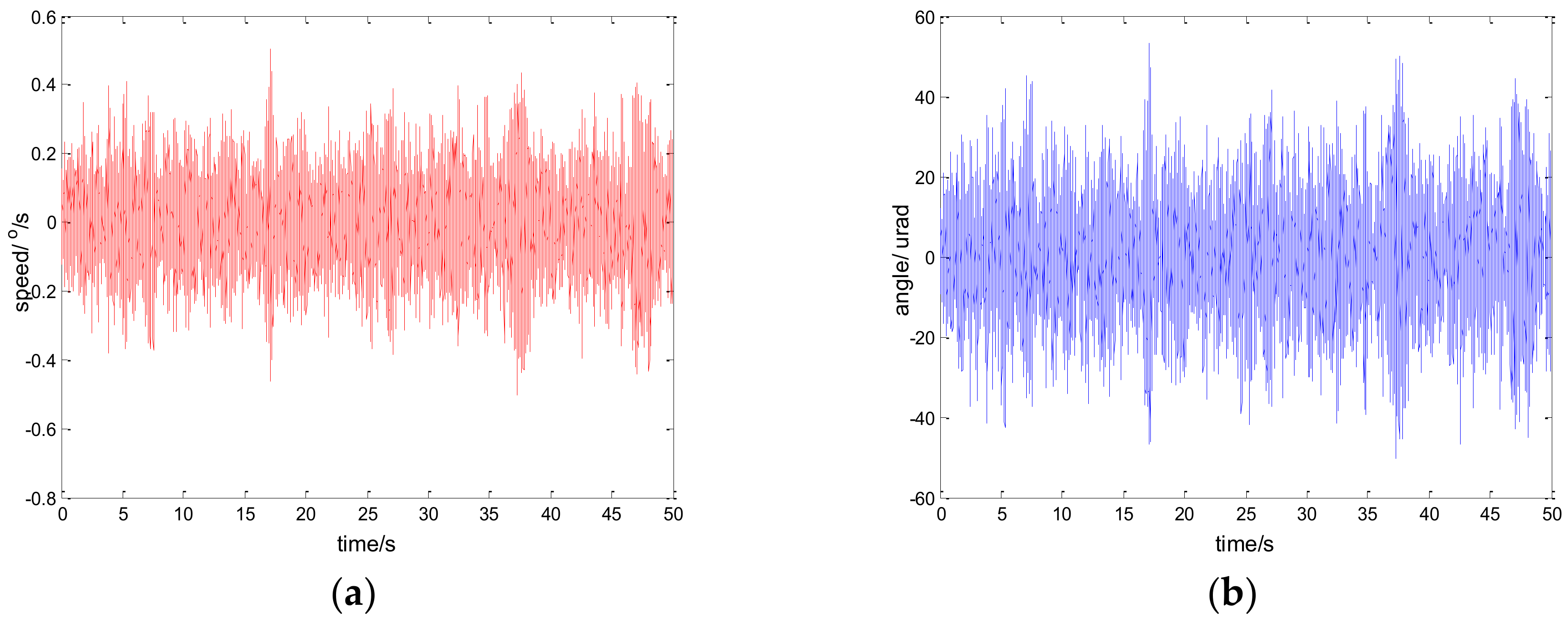
Figure 9a,
Figure 10a and
Figure 11a show the speed signal of the gyro output, and
Figure 9b,
Figure 10b and
Figure 11b show the tracking error obtained by integrating the speed signal. The tracking error shows the inertial tracking capability of the system. The RMS value of the tracking error is used for compared. The formula for calculating the RMS is:
The experimental results demonstrate that, at the disturbance of , the robust sliding mode controller with NTD achieves a satisfactory inertial tracking performance. The tracking error RMS values of the three control methods are 48.6156 urad, 25.7942 urad, and 17.5528 urad, respectively. Compared to the PI method and the robust sliding mode controller with Euler, the tracking error RMS values of the robust sliding mode controller with NTD reduce by 63.89% and 31.95%, respectively. In order to verify the effectiveness of the proposed method under various disturbances, the following comparison experiments are also conducted.
Figure 12,
Figure 13 and
Figure 14 show the experiment results in medium angle low frequency disturbance signal
with the maximum acceleration of
;
Figure 15,
Figure 16 and
Figure 17 show the experiment results in the large angle, low-frequency disturbance signal
with the maximum acceleration of
;
Figure 18,
Figure 19 and
Figure 20 show the experiment results in small angle, high-frequency disturbance signal
with the maximum acceleration of
. In addition,
is the small angle, medium-frequency disturbance signal with the maximum acceleration of
.
From the experimental results presented, it is evident that the proposed robust SMC with NTD has obvious advantages. For a more intuitive comparison, the RMS value column diagram of the tracking error under different disturbance conditions is shown in
Figure 21. What is worth paying attention to here is that when only the PI method is compared, the RMS value of the tracking error under the disturbance of
and
with small maximum acceleration is even higher than the others. This is due to the existence of friction and other disturbances in the system, and the other two methods, due to the use of the disturbance observer, this phenomenon is well suppressed.
Considering the robustness of the proposed method, we change the parameters of the controlled object by artificially increasing the load [
33]. Specifically, we use the method of sticking lead blocks to achieve this. In fact, the inertia
is increased in Equation (13) in this way. By testing the performance of the system in this case, we can indirectly weigh the robust performance of the system when the model changes.
Figure 22 shows the experiment results under the disturbance signal
by adding a 50 g lead (the load weight of the original system is about 800 g);
Figure 23 shows the experiment results under the disturbance signal
by adding an 80 g lead.
Comparing the results of
Figure 23 and
Figure 11,
Figure 22 and
Figure 14, respectively, we can determine that although the performance of the system is lower than that of the original, it still has good performance. To a certain extent, the robustness of the controller is verified. In practical applications, due to the influence of environment, such as temperature, humidity, mechanical wear, and so on, the parameters of the system will change. Therefore, the robustness of the system is of great significance.

























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}