A Temperature-Hardened Sensor Interface with a 12-Bit Digital Output Using a Novel Pulse Width Modulation Technique

 , , and
, , and
Abstract
:
1. Introduction
2. Sensor Interface Principle Based on Voltage to Pulse Width Modulated signal Conversion
2.1. Injection Locked Oscillators
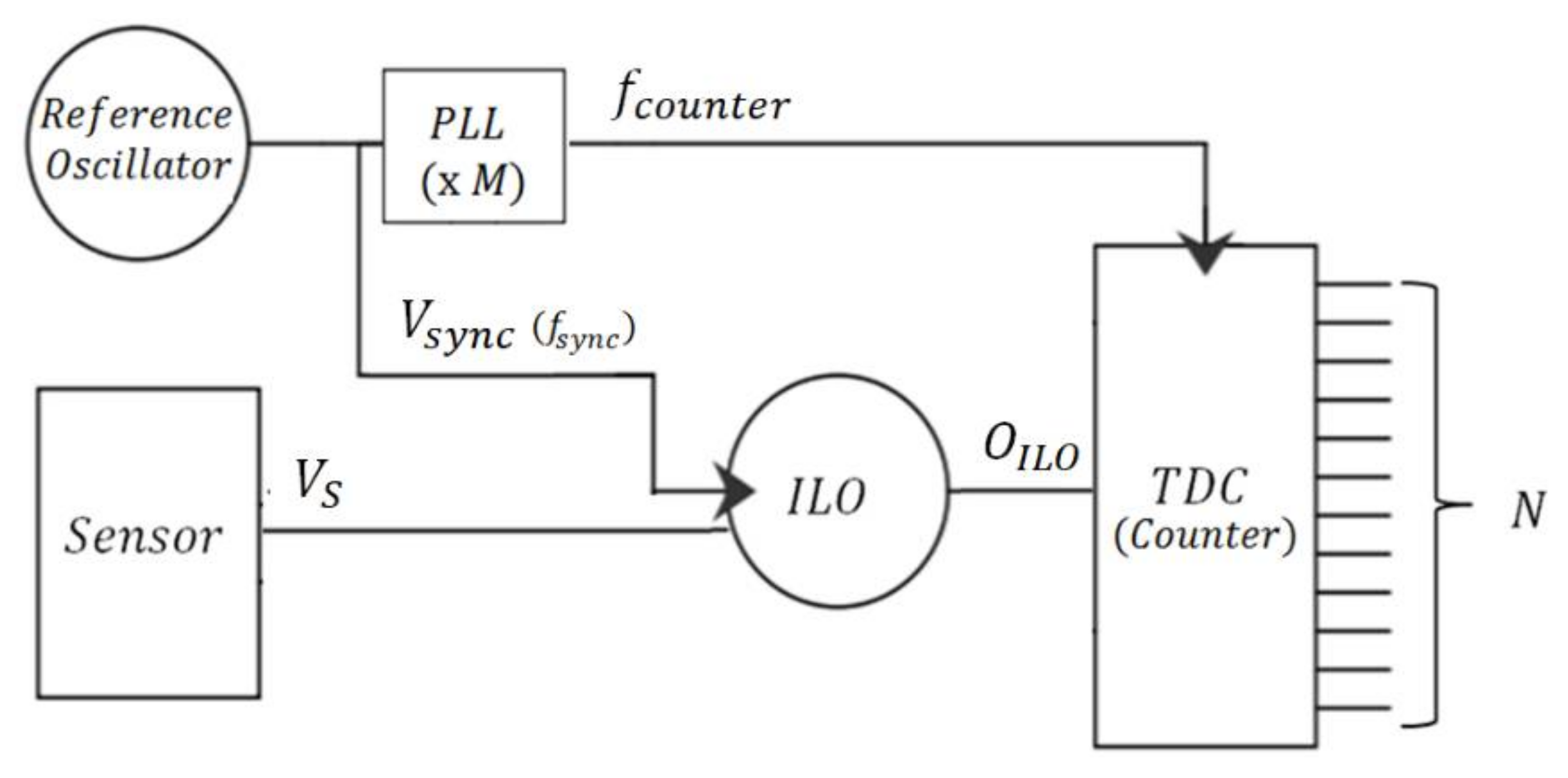
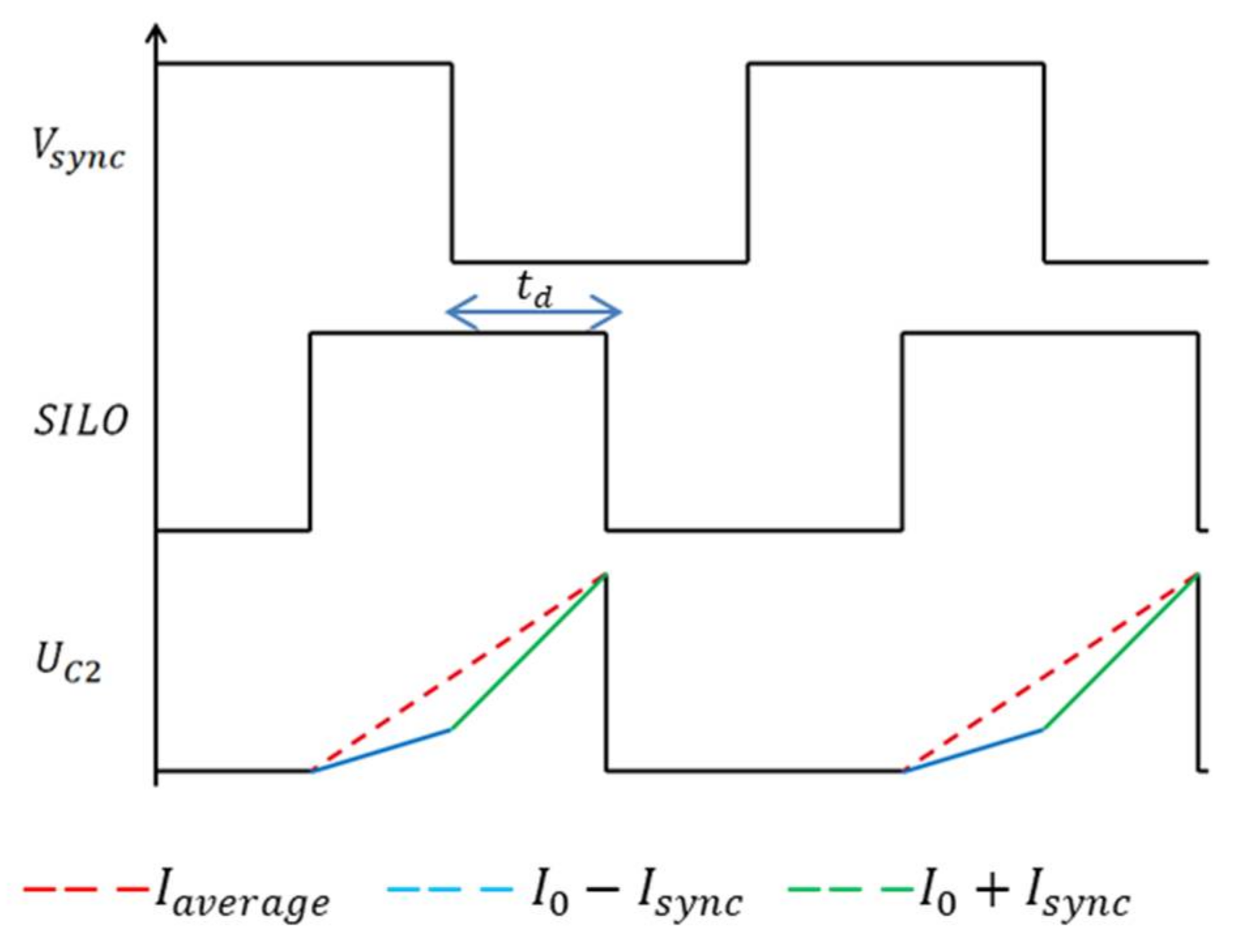
2.2. Pulse Width Modulation-Based Sensor Interface Using Injection Locked Oscillator
3. Architecture of the Proposed High Temperature Sensor Interface
3.1. Injection Locked Relaxation Oscillator (ILRO)
3.2. High Temperature Sensor Interface Architecture
3.3. Block Implementation
3.3.1. Biasing Block
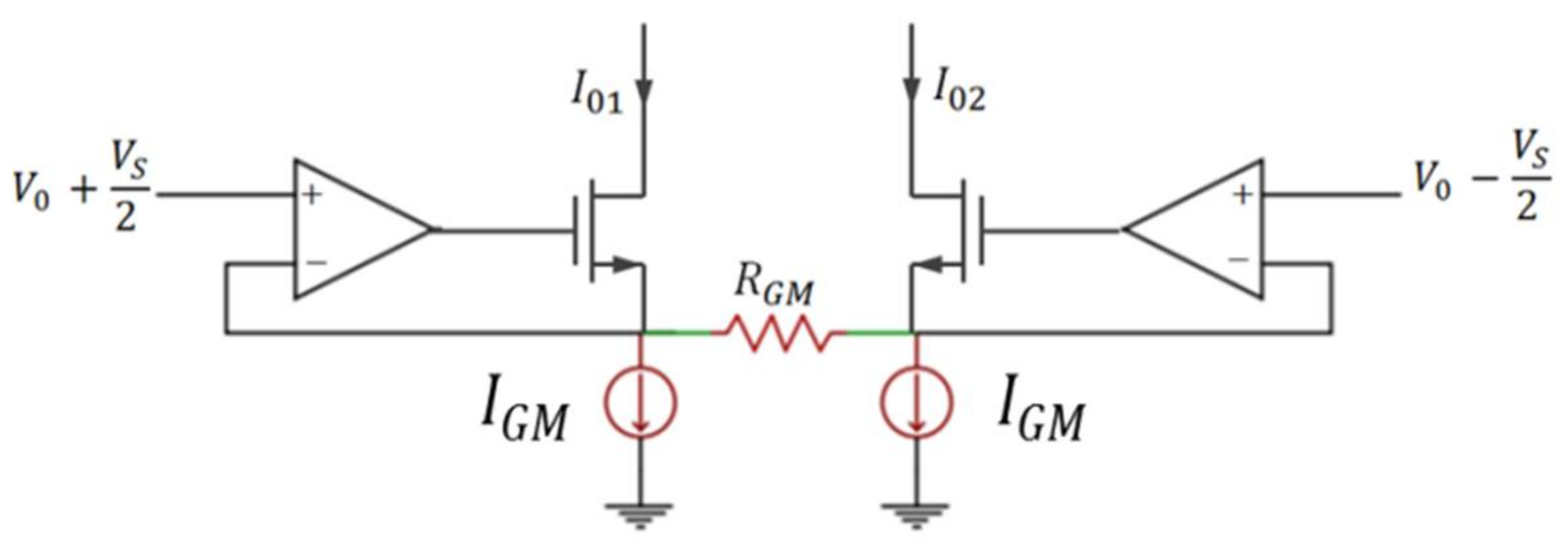
3.3.2. Transconductance Amplifier (OTA)
3.4. Robustness of the Architecture against Temperature
4. Simulations and Experimental Results
4.1. Simulation Results
4.1.1. Characteristic Function: Thermal Stability and Linearity
4.1.2. Effect of Process Variation
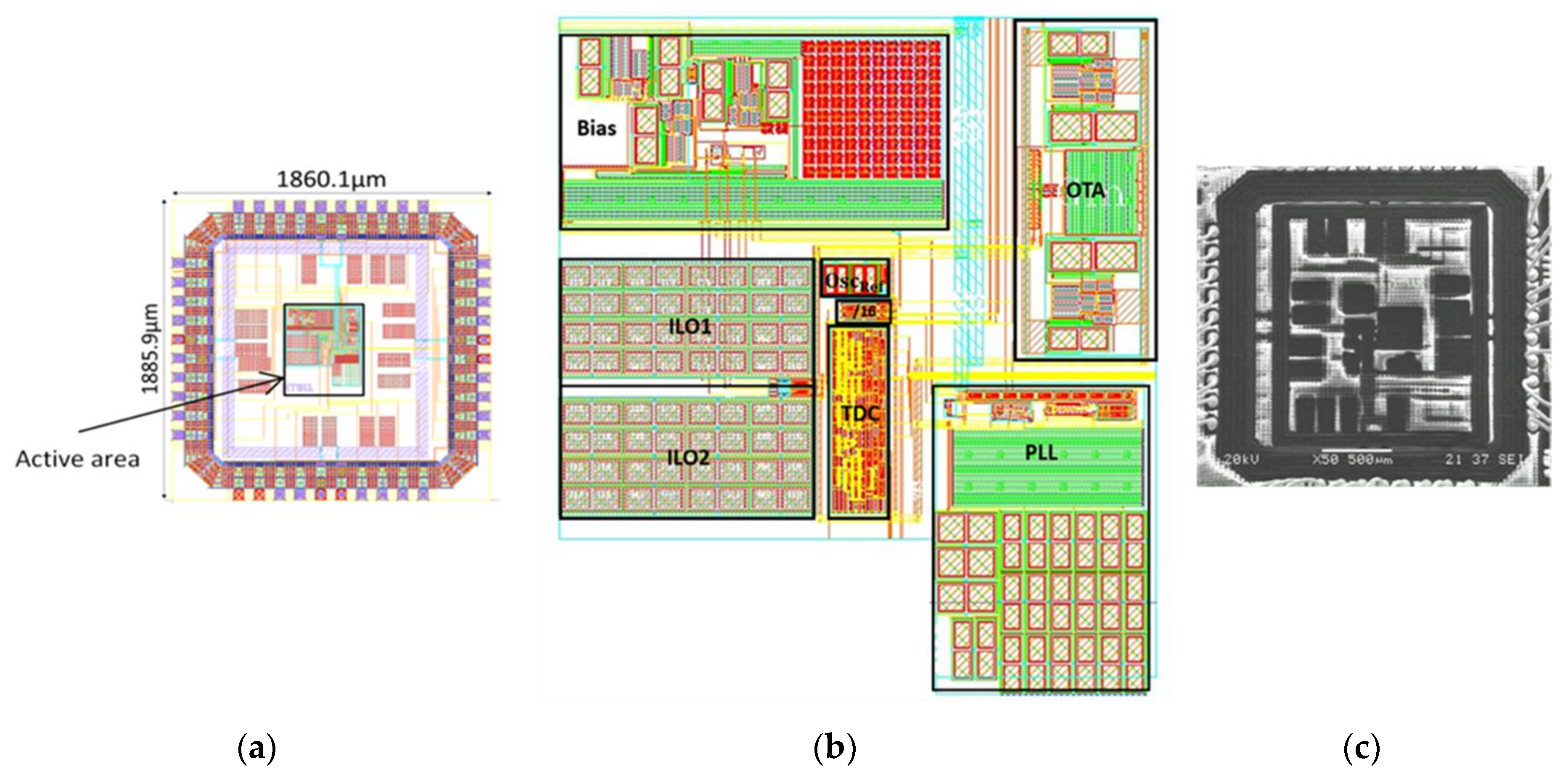
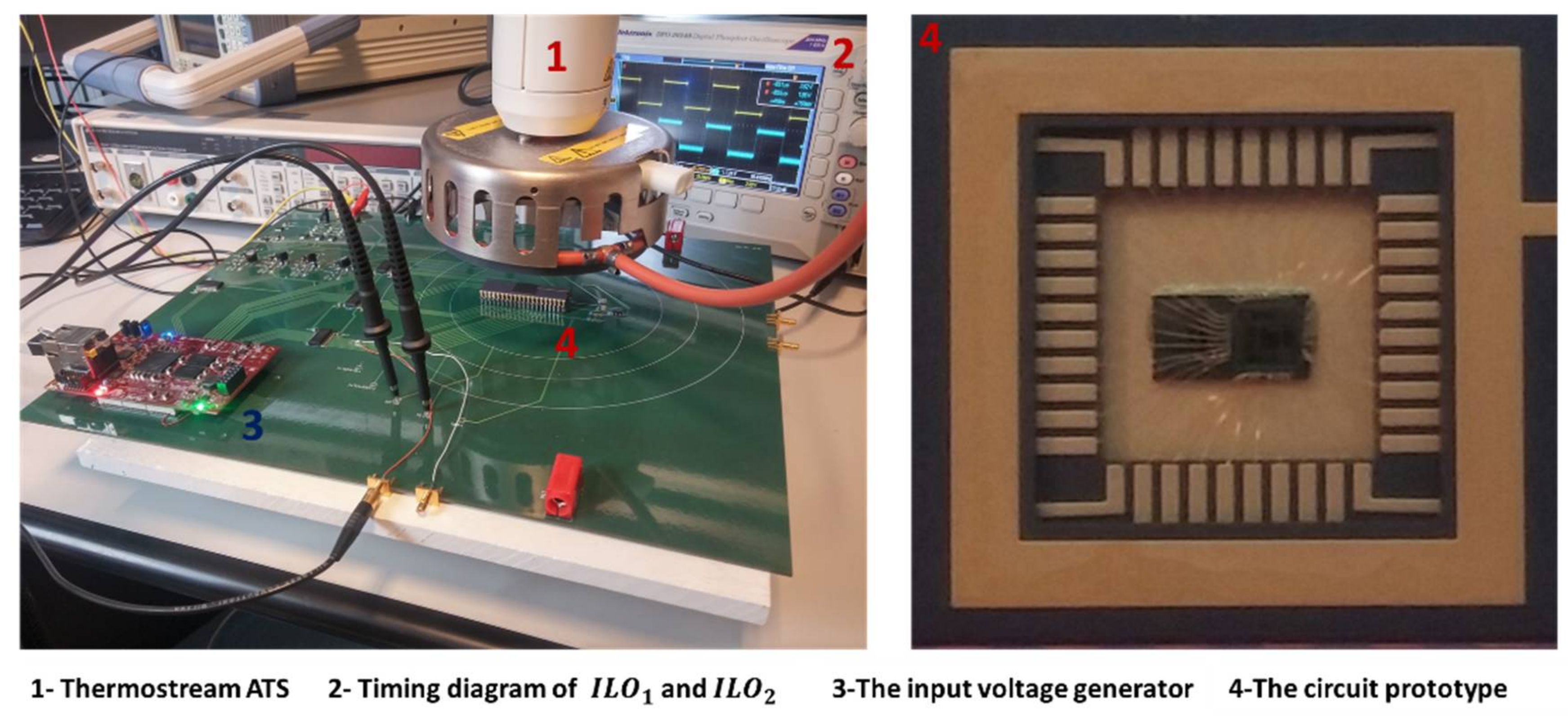
4.2. Characterizations of the Fabricated Prototype
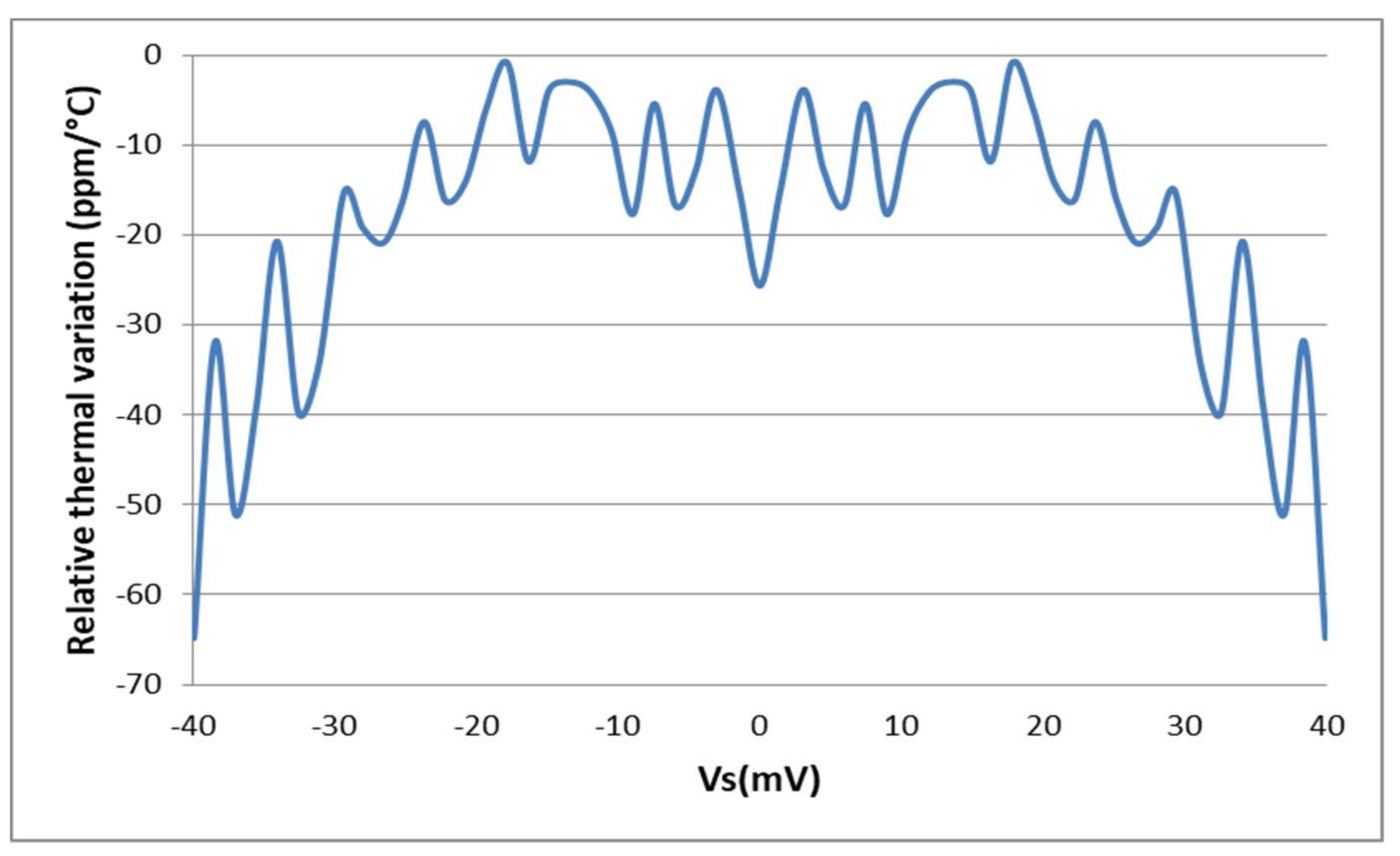
4.2.1. Characteristic Function and Thermal Variation
4.2.2. Linearity
5. Conclusions
Author Contributions
Conflicts of Interest
References
- Johnston, C.; Crossley, A.; Sharp, R. The possibilities for high temperature electronics in combustion monitoring. In Proceedings of the IEEE Seminar Advanced Sensors and Instrumentation Systems for Combustion Processes, London, UK, 27 June 2000; pp. 9–11. [Google Scholar]
- Dreike, P.L.; Fleetwood, D.M.; King, D.B.; Sprauer, D.C.; Zipperian, T.E. An overview of high-temperature electronic device technologies and potential applications. IEEE Trans. Compon. Packag. Manuf. Technol. Part A 1994, 17, 594–609. [Google Scholar] [CrossRef]
- Hunt, B.; Tooke, A. High temperature electronics for harsh environments. In Proceedings of the 18th European Microelectronics Packaging Conference, Brighton, UK, 12–15 September 2011; pp. 1–5. [Google Scholar]
- Yu, X. High-Temperature Bulk CMOS Integrated Circuits for Data Acquisition; Case Western Reserve University: Cleveland, OH, USA, 2006. [Google Scholar]
- Willander, M. High Temperature Electronics; Springer: Berlin, Germany, 1997. [Google Scholar]
- Smedt, V.D.; Gielen, G.; Dehaene, W. A 40 nm-CMOS, 18 µW, temperature and supply voltage independent sensor interface for RFID tags. In Proceedings of the 2013 IEEE Asian Solid-State Circuits Conference (A-SSCC), Singapore, 11–13 November 2013; pp. 113–116. [Google Scholar]
- Gläser, G.; Kirsten, D.; Richter, A.; Reinhard, M.; Kropp, G.; Nuernbergk, D.M. High-Precision Mixed-Signal Sensor Interface for a Wide Temperature Range [0–300 °C]. J. Microelectron. Electron. Packag. 2018, 15, 1–8. [Google Scholar] [CrossRef]
- Wang, Y.; Chodavarapu, V.P. Design of CMOS capacitance to frequency converter for high-temperature MEMS sensors. In Proceedings of the 2013 IEEE SENSORS, Baltimore, MD, USA, 3–6 November 2013; pp. 1–4. [Google Scholar]
- Aragones, R.; Oliver, J.; Ferrer, C. A 16 ppm/°C ROIC for capacitive-sensor signal-acquisition applications. In Proceedings of the 2012 IEEE Sensors, Taipei, Taiwan, 28–31 October 2012; pp. 1–4. [Google Scholar]
- George, A.K.; Lee, J.; Kong, Z.H.; Je, M. A 0.8 V Supply- and Temperature-Insensitive Capacitance-to-Digital Converter in 0.18 µm CMOS. IEEE Sens. J. 2016, 16, 5354–5364. [Google Scholar] [CrossRef]
- Sharma, V.; Jain, N.; Mishra, B. Fully-digital time based ADC/TDC in 0.18 µm CMOS. In Proceedings of the 2016 International Conference on VLSI Systems, Architectures, Technology and Applications (VLSI-SATA), Bangalore, India, 10–12 January 2016; pp. 1–6. [Google Scholar]
- Marcellis, A.D.; Cubells-Beltran, M.D.; Reig, C.; Madrenas, J.; Zadov, B.; Paperno, E.; Cardoso, S.; Freitas, P.P. Quasi-digital front-ends for current measurement in integrated circuits with giant magnetoresistance technology. IET Circuits Devices Syst. 2014, 8, 291–300. [Google Scholar] [CrossRef]
- Toraskar, D.; Mattada, M.; Guhilot, H. Comparison between Voltage Domain and Time Domain ADCs—A Review. Int. J. Adv. Res. Comput. Commun. Eng. 2016, 5. [Google Scholar] [CrossRef]
- Prabha, P.; Kim, S.J.; Reddy, K.; Rao, S.; Griesert, N.; Rao, A.; Winter, G.; Hanumolu, P.K. A Highly Digital VCO-Based ADC Architecture for Current Sensing Applications. IEEE J. Solid-State Circuits 2015, 50, 1785–1795. [Google Scholar] [CrossRef]
- Nebhen, J.; Meillere, S.; Masmoudi, M. A High Linear and Temperature Compensation Ring Voltage-Controlled Oscillator for Random Number Generator. ASP J. Low Power Electron. 2017, 13, 588–594. [Google Scholar]
- Adler, R. A Study of Locking Phenomena in Oscillators. Proc. IRE 1946, 34, 351–357. [Google Scholar] [CrossRef]
- Huntoon, R.D.; Weiss, A. Synchronization of Oscillators. Proc. IRE 1947, 35, 1415–1423. [Google Scholar] [CrossRef]
- Badets, F.; Belot, D. A 100 MHz DDS with synchronous oscillator-based phase interpolator. In Proceedings of the 2003 IEEE International Solid-State Circuits Conference, San Francisco, CA, USA, 13 February 2003; pp. 410–503. [Google Scholar]
- Badets, F.; Benyahia, M.; Belot, D. Synchronous Oscillator Locked Loop: A New Delay Locked Loop Using Injection Locked Oscillators as Delay Elements. In Proceedings of the 19th International Conference on Design of Circuits and Integrated Systems, Bordeaux, France, 24–26 November 2004; pp. 599–602. [Google Scholar]
- Chabchoub, E.; Badets, F.; Masmoudi, M.; Nouet, P.; Mailly, F. Highly Linear Voltage-to-Time Converter Based on Injection Locked Relaxation Oscillators. In Proceedings of the 2017 14th International Multi-Conference on Systems, Signals & Devices (SSD), Marrakech, Morocco, 28–31 March 2017; pp. 733–737. [Google Scholar]
- Roberts, G.W.; Ali-Bakhshian, M. A Brief Introduction to Time-to-Digital and Digital-to-Time Converters. IEEE Trans. Circuits Syst. II 2010, 57, 153–157. [Google Scholar] [CrossRef]
- Elamien, M.B.; Mahmoud, S.A. A linear CMOS balanced output transconductor using double differential pair with source degeneration and adaptive biasing. In Proceedings of the 2016 IEEE 59th International Midwest Symposium on Circuits and Systems (MWSCAS), Abu Dhabi, UAE, 16–19 October 2016; pp. 1–4. [Google Scholar]
- Nagarig, R.L.; Yagain, D. Design and Implementation of a Linear Transconductance Amplifier with a Digitally Controlled Current Source. In Proceedings of the 2011 Fourth International Conference on Emerging Trends in Engineering Technology, Port Louis, Mauritius, 18–20 November 2011; pp. 274–279. [Google Scholar]
- Majerus, S.; Merrill, W.; Garverick, S.L. Design and long-term operation of high-temperature, bulk-CMOS integrated circuits for instrumentation and control. In Proceedings of the 2013 IEEE Energytech, Cleveland, OH, USA, 21–23 May 2013; pp. 1–6. [Google Scholar]
- De Smedt, V.; Gielen, G.; Dehaene, W. A Novel, Highly Linear, Voltage and Temperature Independent Sensor Interface using Pulse Width Modulation. Procedia Eng. 2012, 47, 1215–1218. [Google Scholar] [CrossRef]
- Portmann, L.; Ballan, H.; Declercq, M. A SOI CMOS Hall effect sensor architecture for high temperature applications (up to 300 °C). In Proceedings of the IEEE Sensors, Orlando, FL, USA, 12–14 June 2002; pp. 1401–1406. [Google Scholar]
- Grezaud, R.; Sibeud, L.; Lepin, F.; Willemin, J.; Riou, J.C.; Gomez, B. A robust and versatile, −40 °C to 180 °C, 8S ps to 1 kSps, multi power source wireless sensor system for aeronautic applications. In Proceedings of the 2017 Symposium on VLSI Circuits, Singapore, 11–13 November 2017; pp. C310–C311. [Google Scholar]





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Performances | This work | V. De Smedt, 2013 [2] | G. Glaser, 2017 [3] | V. De Smedt, 2012 [25] | Portmann, 2002 [26] | R. Grezaud, 2017 [27] |
|---|---|---|---|---|---|---|
| Temperature Range (°C) | −20 to 220 (Meas.) −40 to 250 (Sim.) | −20 to 100 (Meas.) | 0 to 300 (Meas.) | −40 to 120 (Sim.) | 25 to 300 (Meas.) | −40 to 180 (Meas.) |
| Thermal Drift | 65 ppm/°C (Meas.) 38 ppm/°C (Sim.) | 79 ppm/°C | ±1.3%FS (±43 ppm/°C) | N.A | ±4% of FS (±123 ppm/°C) | N.A |
| Sensor Type | resistive | resistive | Resistive | resistive | Magnetic | resistive |
| Non-Linearity | 1.5% (Meas.) | 0.7% | N.A | 0.19% | N.A | N.A |
| Consumption | 1 mW | 18 μA | N.A | 96 µW | 4.5 mA | 34 µA |
| Resolution | 11 bit for the output +1 bit for the VS sign | N.A | N.A | 9 bit | 8 bit | 10 bit |
| Size | 1860.1 × 1885.9 (µm2) 0.21 mm2 (active) | 550 × 300 (µm2) 95 × 95 (µm2) (active) | N.A | N.A | 3.3 × 1.7 (mm2) | 4.25 × 4.25 (mm2) |
| Technology | 180 nm HT SOI Vdd 1: 1.8 V | 40 nm CMOS Vdd: 1 V | N.A | 130 nm CMOS Vdd: 1.2 V | 1 µm CMOS Vdd: 5 V | 180 nm HT SOI Vdd: 1.8 V |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chabchoub, E.; Badets, F.; Mailly, F.; Nouet, P.; Masmoudi, M. A Temperature-Hardened Sensor Interface with a 12-Bit Digital Output Using a Novel Pulse Width Modulation Technique. Sensors 2018, 18, 1107. https://doi.org/10.3390/s18041107
Chabchoub E, Badets F, Mailly F, Nouet P, Masmoudi M. A Temperature-Hardened Sensor Interface with a 12-Bit Digital Output Using a Novel Pulse Width Modulation Technique. Sensors. 2018; 18(4):1107. https://doi.org/10.3390/s18041107
Chicago/Turabian StyleChabchoub, Emna, Franck Badets, Frédérick Mailly, Pascal Nouet, and Mohamed Masmoudi. 2018. "A Temperature-Hardened Sensor Interface with a 12-Bit Digital Output Using a Novel Pulse Width Modulation Technique" Sensors 18, no. 4: 1107. https://doi.org/10.3390/s18041107
APA StyleChabchoub, E., Badets, F., Mailly, F., Nouet, P., & Masmoudi, M. (2018). A Temperature-Hardened Sensor Interface with a 12-Bit Digital Output Using a Novel Pulse Width Modulation Technique. Sensors, 18(4), 1107. https://doi.org/10.3390/s18041107