Real-Time Seismic Data from the Bottom Sea



 ,
,
Abstract
:1. Introduction
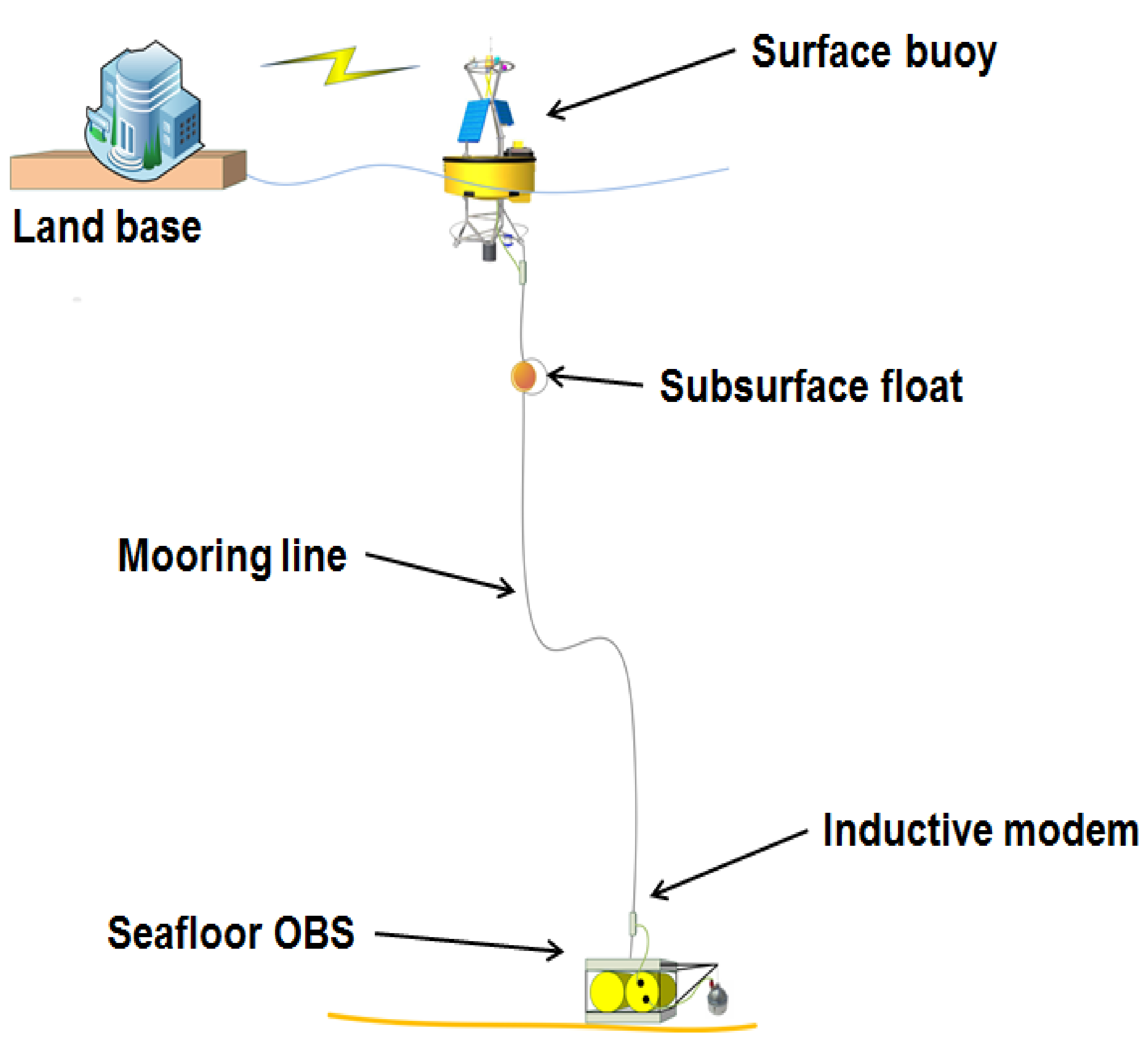
2. Standalone Broadband Ocean Bottom System
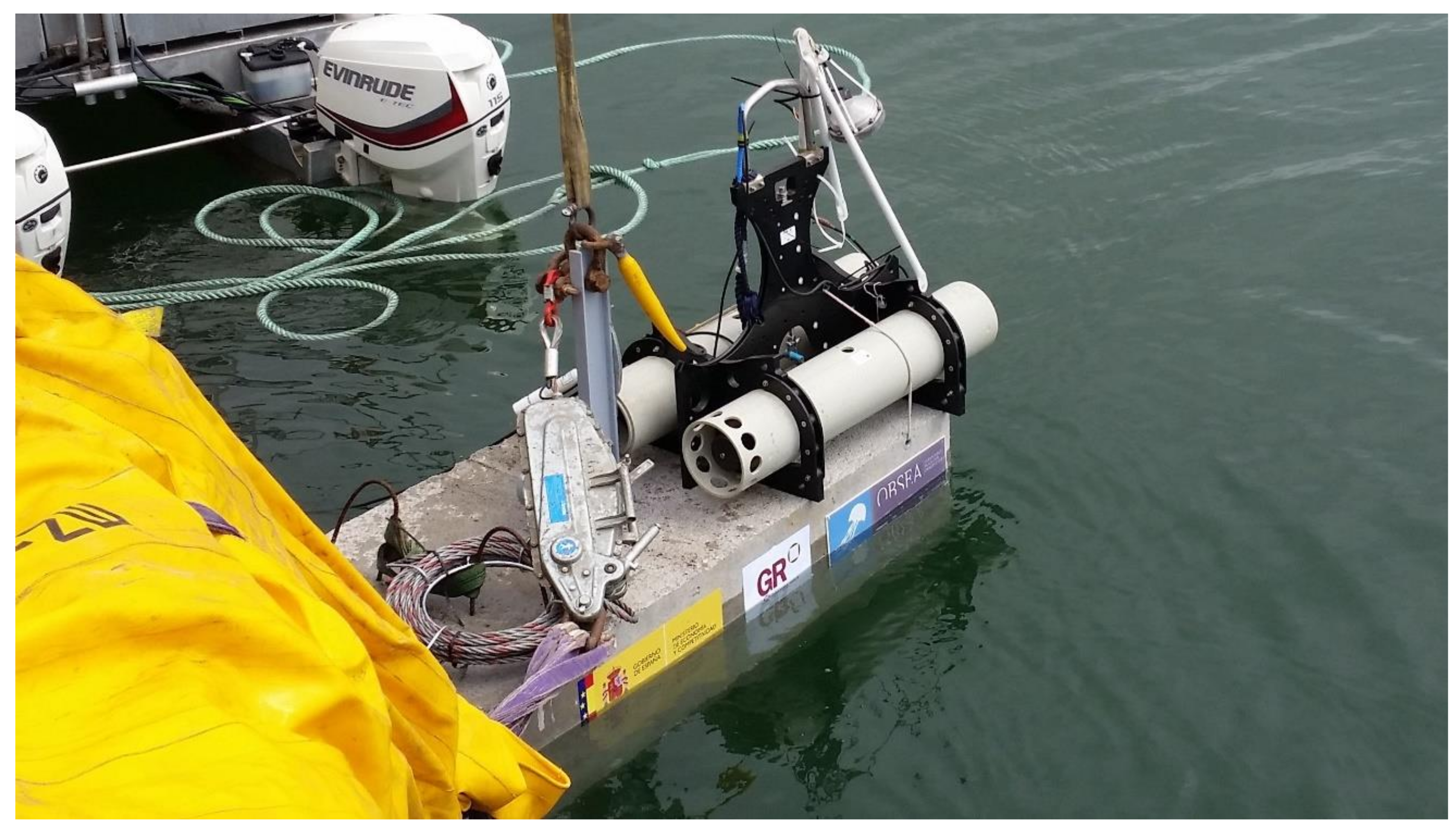
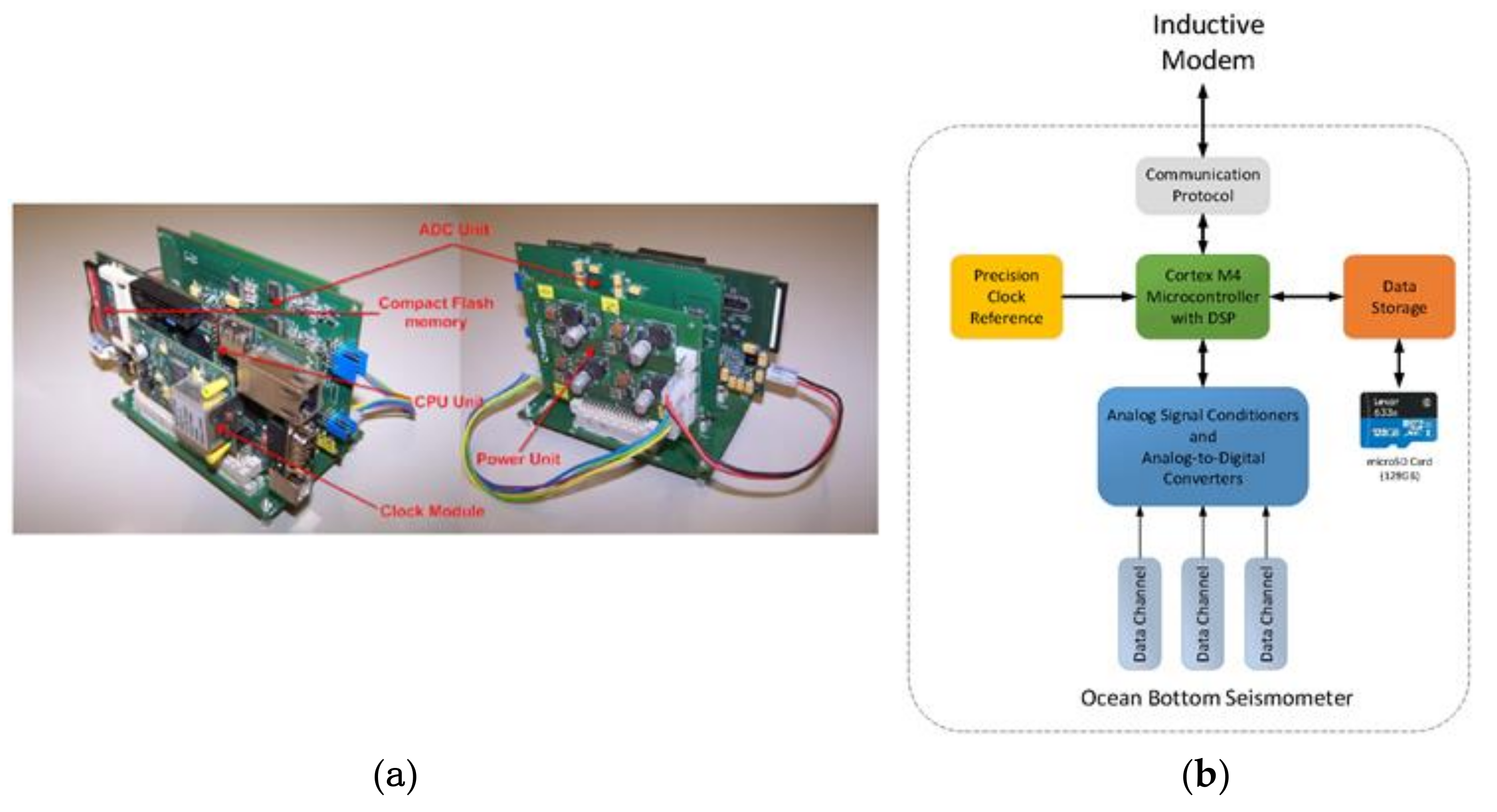
2.1. The Seafloor Unit
2.2. Surface Buoy
2.3. The Mooring and Inductive Communication System
2.3.1. Mooring Configurations
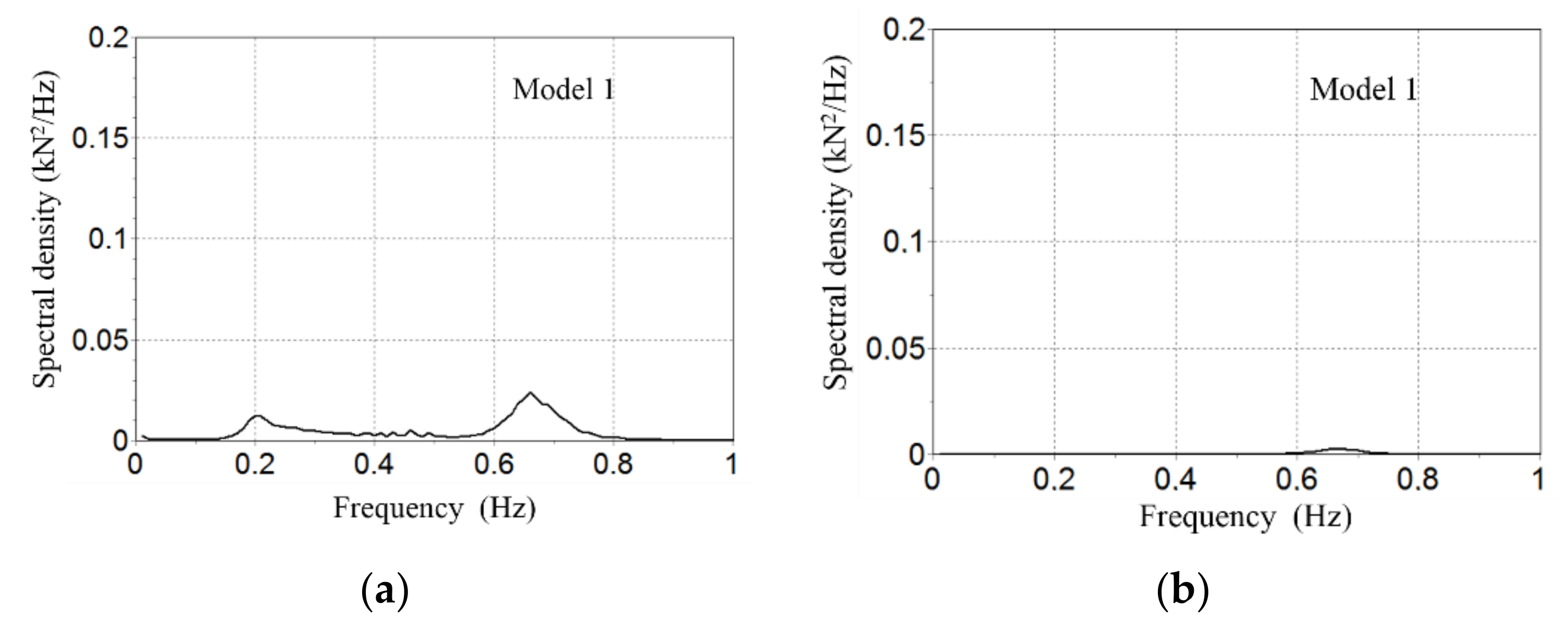
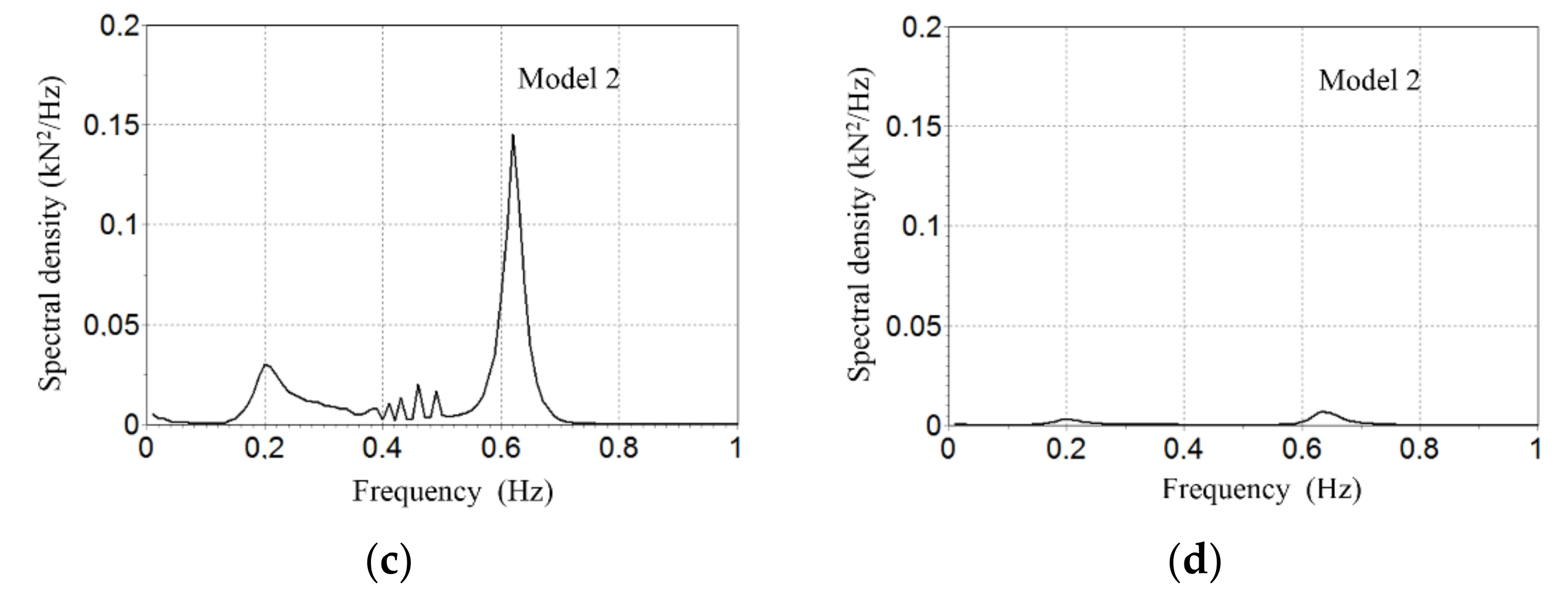
2.3.2. Numerical Simulations
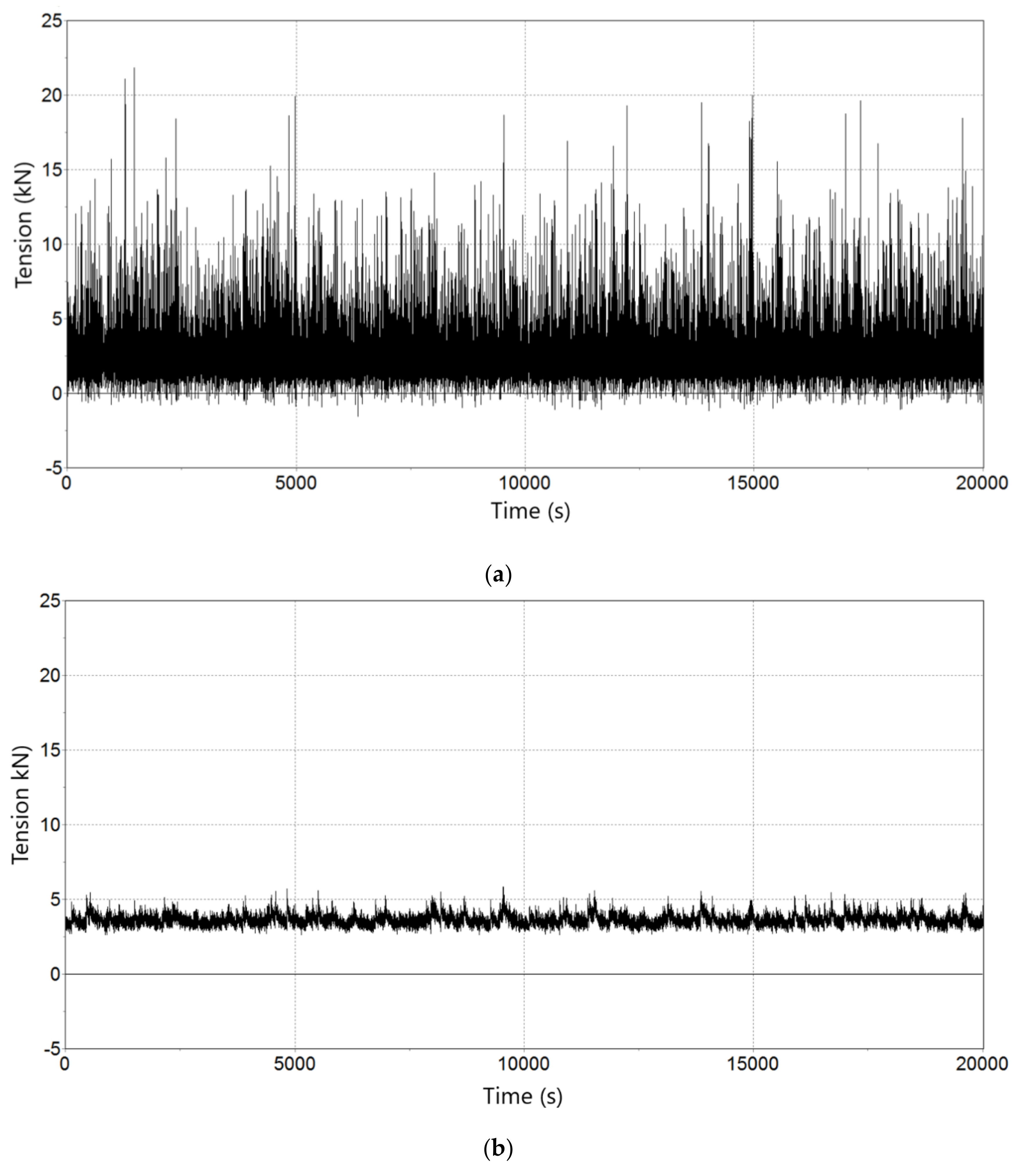
2.3.3. Simulation Results
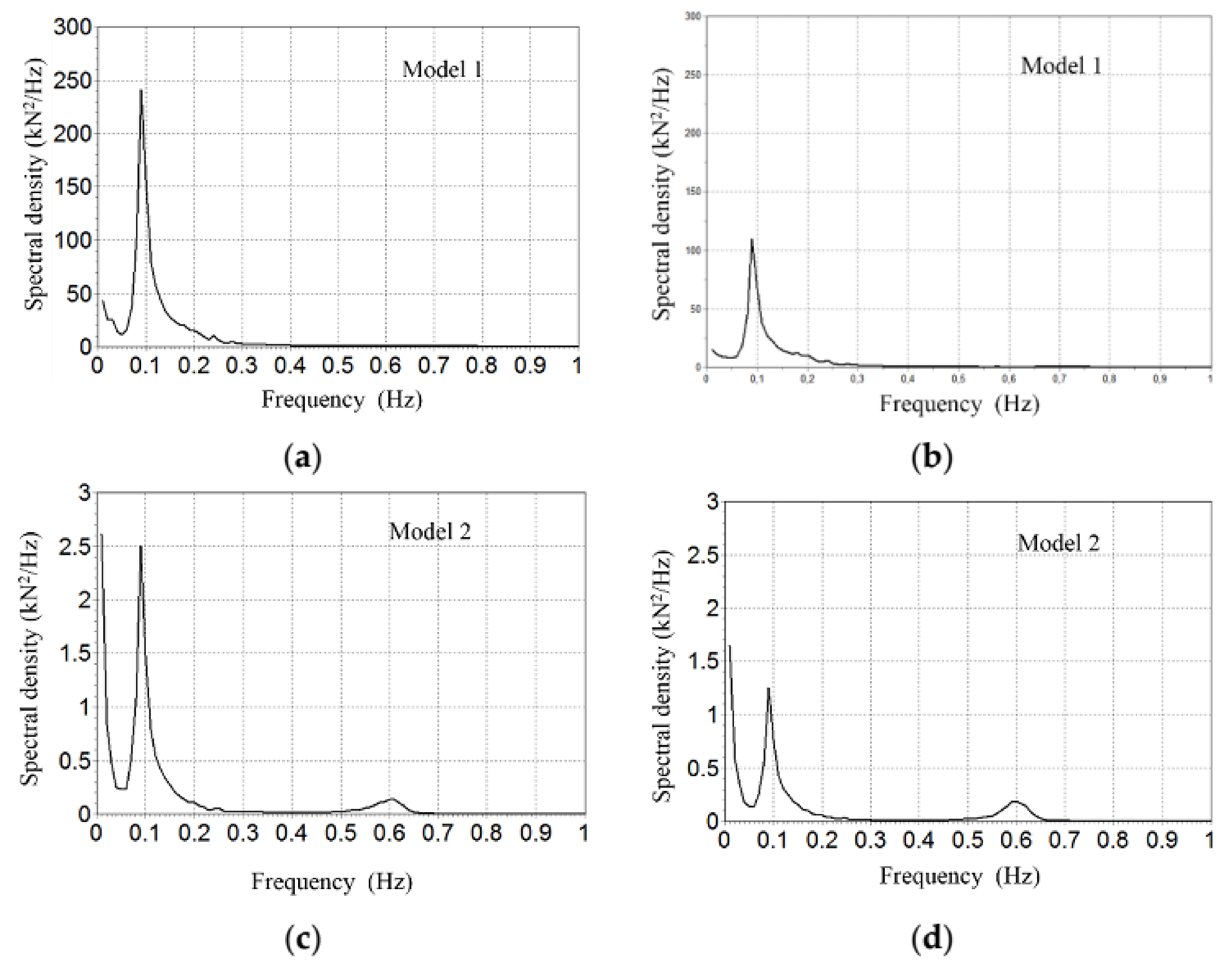
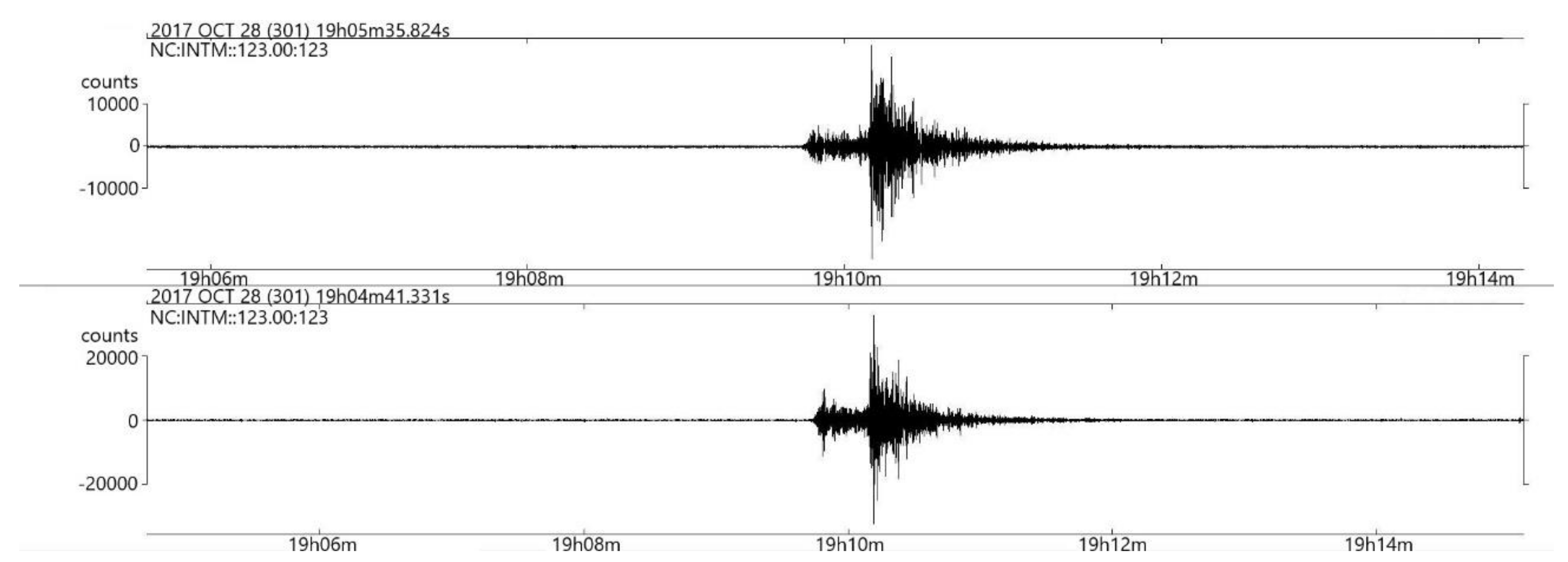
3. Results
4. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Romanowicz, B.; Stakes, D.; Dolenc, D.; Neuhauser, D.; McGill, P.; Uhrhammer, R.; Ramirez, T. The monterey bay broadband ocean bottom seismic observatory. Ann. Geophys. 2006, 49, 607–623. [Google Scholar]
- Phibbs, P.; Cook, R. NEPTUNE Canada Cable Ocean Observatory—Now a Reality. In Proceedings of the SubOptic, Yokohama, Japan, 11–14 May 2010. [Google Scholar]
- Frontera, T.; Ugalde, A.; Olivera, C.; Jara, J.A.; Goula, X. Seismic ambient noise characterization of a new permanent broadband ocean bottom seismometer site offshore catalonia (northeastern Iberian Peninsula). Seismol. Res. Lett. 2010, 81, 740–749. [Google Scholar] [CrossRef]
- Pallarés, O.; Cadena-Muñoz, J.; Carreras, N.; Toma, D.M.; del-Río-Fernández, J. Contribution to COBS synchronization with PTP IEEE std. 1588. In Proceedings of the 2013 MTS/IEEE OCEANS—Bergen, Bergen, Norway, 10–14 June 2013; pp. 1–4. [Google Scholar] [CrossRef]
- Frye, D.; Ware, J.; Grund, M.; Partan, J.; Koski, P.; Singh, S.; Freitag, L.; Collins, J.; Detrick, R. An acoustically-linked deep-ocean observatory. In Proceedings of the Europe Oceans 2005, Brest, France, 20–23 June 2005; Volume 2, pp. 969–974. [Google Scholar] [CrossRef]
- Berger, J.; Laske, G.; Babcock, J.; Orcutt, J. An ocean bottom seismic observatory with near real-time telemetry. Earth Space Sci. 2016, 3, 68–77. [Google Scholar] [CrossRef]
- Hello, Y.; Ogé, A.; Sukhovich, A.; Nolet, G. Modern Mermaids: New Floats Image the Deep Earth. Eos Trans. Am. Geophys. Union 2011, 92, 337–338. [Google Scholar] [CrossRef]
- Mànuel, A.; Roset, X.; del Rio, J.; Toma, D.M.; Carreras, N.; Panahi, S.S.; Garcia-Benadí, A.; Owen, T.; Cadena, J. Ocean Bottom Seismometer: Design and Test of a Measurement System for Marine Seismology. Sensors 2012, 12, 3693–3719. [Google Scholar] [CrossRef] [PubMed]
- Aguzzi, J.; Mànuel, A.; Condal, F.; Guillén, J.; Nogueras, M.; del Rio, J.; Costa, C.; Menesatti, P.; Puig, P.; Sardà, F.; et al. The New Seafloor Observatory (OBSEA) for Remote and Long-Term Coastal Ecosystem Monitoring. Sensors 2011, 11, 5850–5872. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Seabird Inductive Modem. Available online: ftp://soest.hawaii.edu/bhowe/outgoing/AMM/ALOHA_Mooring/ALOHA%20Mooring/Inductive%20Data/IMtutorialRev5.pdf (accessed on 19 January 2018).
- EMS Toroidal Buoy. Available online: http://www.ems-sistemas.com (accessed on 19 January 2018).
- Prat, J.; Massana, I.; del Rio, J. Simulations of a moored power cable at OBSEA platform. In Proceedings of the 2013 MTS/IEEE OCEANS, Bergen, Norway, 10–14 June 2013; ISBN 978-1-4799-0000-8. [Google Scholar]
- Gobad, J.I.; Grosenbaugh, M.A. Time-domain numerical simulation of ocean cable structures. Ocean Eng. 2006, 33, 1373–1400. [Google Scholar] [CrossRef]
- Carbonell, M.; Massana, I.; Prat, J.; Trullols, E.; del Rio, J. Simulations and design of a sea moored buoy with a real time data undersea seismometer. In Proceedings of the Oceans 2017, Aberdeen, UK, 19–22 June 2017; ISBN 978-1-5090-5278-3. [Google Scholar]
- Garraf Seismic Station. Available online: http://www.icgc.cat/Administracio-i-empresa/Serveis/Informacio-sismica/Sobre-la-xarxa-sismica-i-accelerometrica/Xarxa-sismica/Estacio-sismica-Garraf-CGAR (accessed on 15 March 2018).
- Cabled OBSEA Seismometer. Available online: http://www.upc.edu/cdsarti/OBSEA/data/seismometer.php (accessed on 15 March 2018).
- Seismic sata from Garraf Seismic Station on October 28, 2017. Available online: http://www1.igc.cat/web/ca/sismologia_sismograma_v2.php?dia=20171028&est=CGAR (accessed on 15 March 2018).
- Osler, J.C.; Chapman, D.M.F. Quantifying the interaction of an ocean bottom with the seabed. J. Geophys. Res. 1998, 103, 9878–9894. [Google Scholar] [CrossRef]
- Gaiser, J.E. Detector coupling corrections for vector infidelity of multicomponent OBC data. Geophysics 2007, 72, V67–V77. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Model 1 | Model 2 | ||
|---|---|---|---|
| Line 1 | type | steel cable | elastomer |
| length (m) | 120/140/160 | 17/24/28 | |
| Line 2 | type | steel cable | steel cable |
| length (m) | 200 | 280 | |
| Property | METEO | Units | ||
|---|---|---|---|---|
| Normal | Extrem | |||
| Wave data | Hs | 1 | 5.7 | m |
| Tz | 3.73 | 8.61 | s | |
| Wind velocity | 3 | 20 | m/s | |
| Current velocity | on surface | 0.20 | 1.20 | m/s |
| at 100 m depth | 0.053 | 0.31 | m/s | |
| at 200 m depth | 0.028 | 0.17 | m/s | |
| on the seabed | 0.022 | 0.14 | m/s | |
| Meteo | Line Configuration | Surface Buoy | Line 2 | Seabed | ||||
|---|---|---|---|---|---|---|---|---|
| Ratio Line 1 | Line 1 | Line 2 | min x | max x | Δx | Angle | max T | |
| m | m | m | m | m | degrees | kN | ||
| Model 1 | Steel Cable | Steel cable | ||||||
| normal | 1.2 | 120 | 200 | 66.9 | 79.1 | 12.2 | 3.55 | 2.10 |
| 1.4 | 140 | 200 | 85.9 | 97.1 | 11.2 | 2.52 | 1.42 | |
| 1.6 | 160 | 200 | 101 | 113 | 12.1 | 2.36 | 1.37 | |
| extreme | 1.2 | 120 | 200 | 113 | 132 | 19.2 | 22.6 | 25.9 |
| 1.4 | 140 | 200 | 155 | 174 | 18.7 | 27.8 | 21.9 | |
| 1.6 | 160 | 200 | 188 | 207 | 19.0 | 31.3 | 19.6 | |
| Model 2 | Elastomer | Steel Cable | ||||||
| normal | 0.85 | 17 | 280 | 11.2 | 18.8 | 7.6 | 2.85 | 2.00 |
| 1.2 | 24 | 280 | 24.8 | 33.0 | 8.2 | 3.50 | 2.20 | |
| 1.4 | 28 | 280 | 28.8 | 37.6 | 8.8 | 3.42 | 1.46 | |
| extreme | 0.85 | 17 | 280 | 85.1 | 127 | 41.4 | 22.1 | 7.50 |
| 1.2 | 24 | 280 | 108 | 145 | 36.9 | 24.4 | 5.80 | |
| 1.4 | 28 | 280 | 109 | 145 | 36.6 | 24.4 | 5.84 | |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Roset, X.; Trullols, E.; Artero-Delgado, C.; Prat, J.; Del Río, J.; Massana, I.; Carbonell, M.; Barco de la Torre, J.; Toma, D.M. Real-Time Seismic Data from the Bottom Sea. Sensors 2018, 18, 1132. https://doi.org/10.3390/s18041132
Roset X, Trullols E, Artero-Delgado C, Prat J, Del Río J, Massana I, Carbonell M, Barco de la Torre J, Toma DM. Real-Time Seismic Data from the Bottom Sea. Sensors. 2018; 18(4):1132. https://doi.org/10.3390/s18041132
Chicago/Turabian StyleRoset, Xavier, Enric Trullols, Carola Artero-Delgado, Joana Prat, Joaquin Del Río, Immaculada Massana, Montserrat Carbonell, Jaime Barco de la Torre, and Daniel Mihai Toma. 2018. "Real-Time Seismic Data from the Bottom Sea" Sensors 18, no. 4: 1132. https://doi.org/10.3390/s18041132
APA StyleRoset, X., Trullols, E., Artero-Delgado, C., Prat, J., Del Río, J., Massana, I., Carbonell, M., Barco de la Torre, J., & Toma, D. M. (2018). Real-Time Seismic Data from the Bottom Sea. Sensors, 18(4), 1132. https://doi.org/10.3390/s18041132