Optimizing the Energy and Throughput of a Water-Quality Monitoring System


Abstract
:1. Introduction
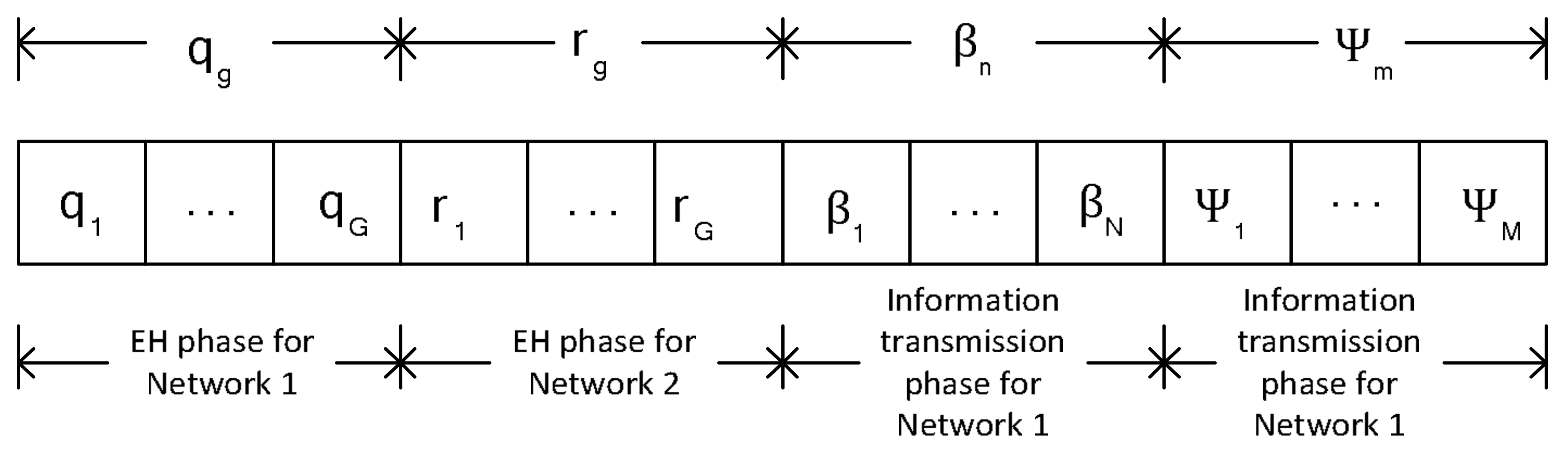
- The formulation of a time-division multiple access (TDMA) model for EH and information transmission for a multi-network, multi-sensor, and multi-source (MNMSMS) system.
- Based on the TDMA protocol proposed, we jointly optimize the EH time and the information-transmission time of each sensor node n and m in the downlink (DL) channels and the uplink (UL) channels respectively, by maximizing the sum-throughput of the MNMSMS system using convex optimization methods [24].
- Efficient multi-network, multi-sensor, DRFES selection, allocation, and information-transmission algorithms were developed for efficient DRFES selection and allocation for fair EH among sensor nodes n and m, and fair information-transmission rate allocation.
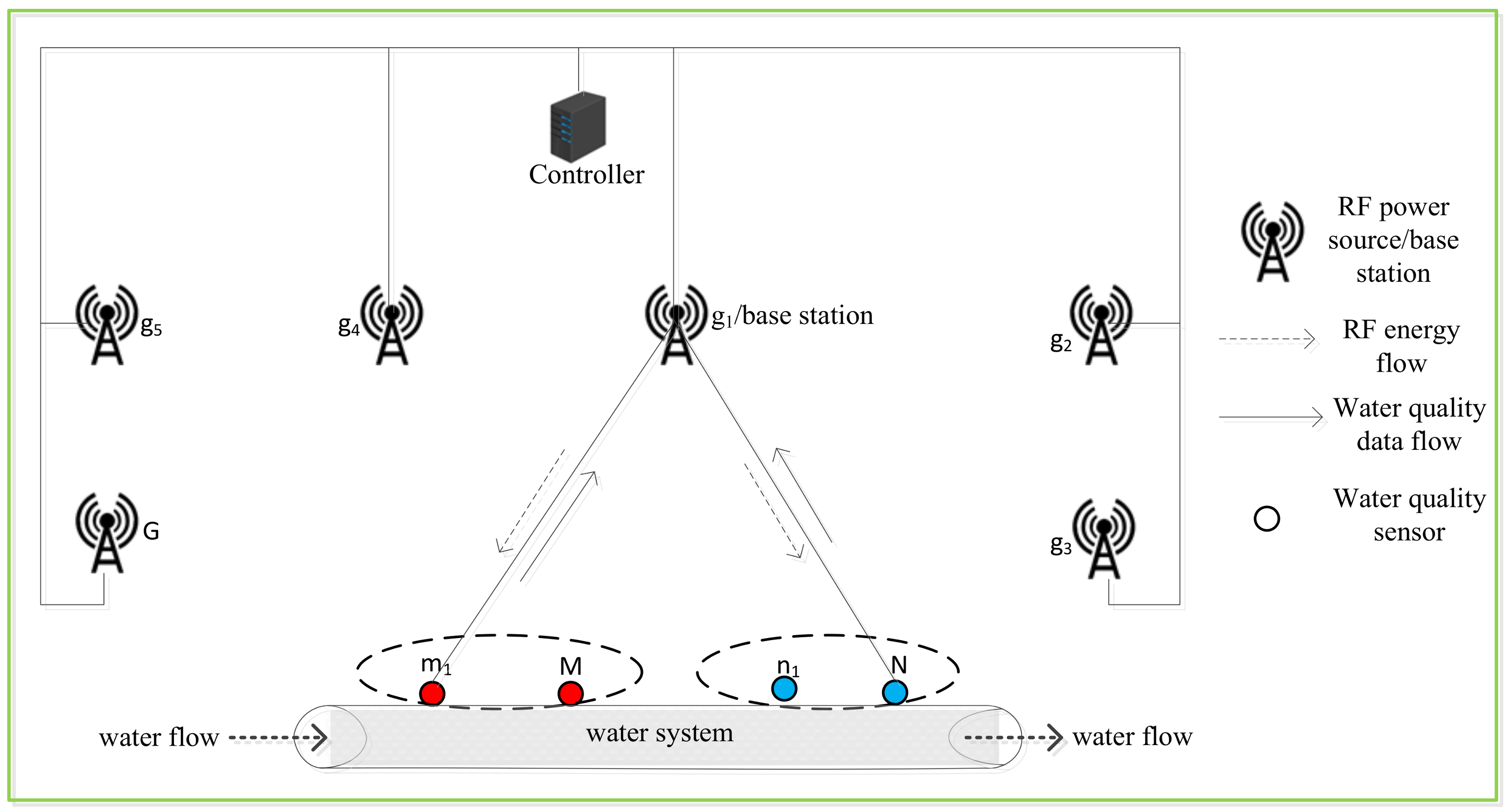
2. Overview of Water-Quality Monitoring System
3. Water-Quality Sensor Node Architecture
4. Related Work
5. Materials and Methods
5.1. System Architecture
5.2. Propagation Channel Model
6. Sum-Throughput Maximization Problem
7. Energy Harvesting and Information-Transmission Rate Joint Optimization
| Algorithm 1. Selection of DRFES and efficient allocation. |
| : ; ; |
| : , , |
| 1: |
| 2: |
| 3: |
| 4: |
| 5: |
| 6: |
| 7: |
| 8: |
| 9: |
| 10: |
| 11: |
| 12: |
| 13: |
| 14: |
| 15: |
| 16: |
| 17: |
| 18: |
| 19: |
| 20: |
| 21: |
| 22: end for |
| end |
| Algorithm 2. Efficient information transmission in the uplink. |
| : ; ; |
| 1: in |
| 2: transfer information in the UL to Equation (5) over |
| 3: |
| 4: in |
| 5: transfer information in the UL to Equation (17) over |
| 6: |
| end |
8. Simulation and Discussion
8.1. Results and Discussion
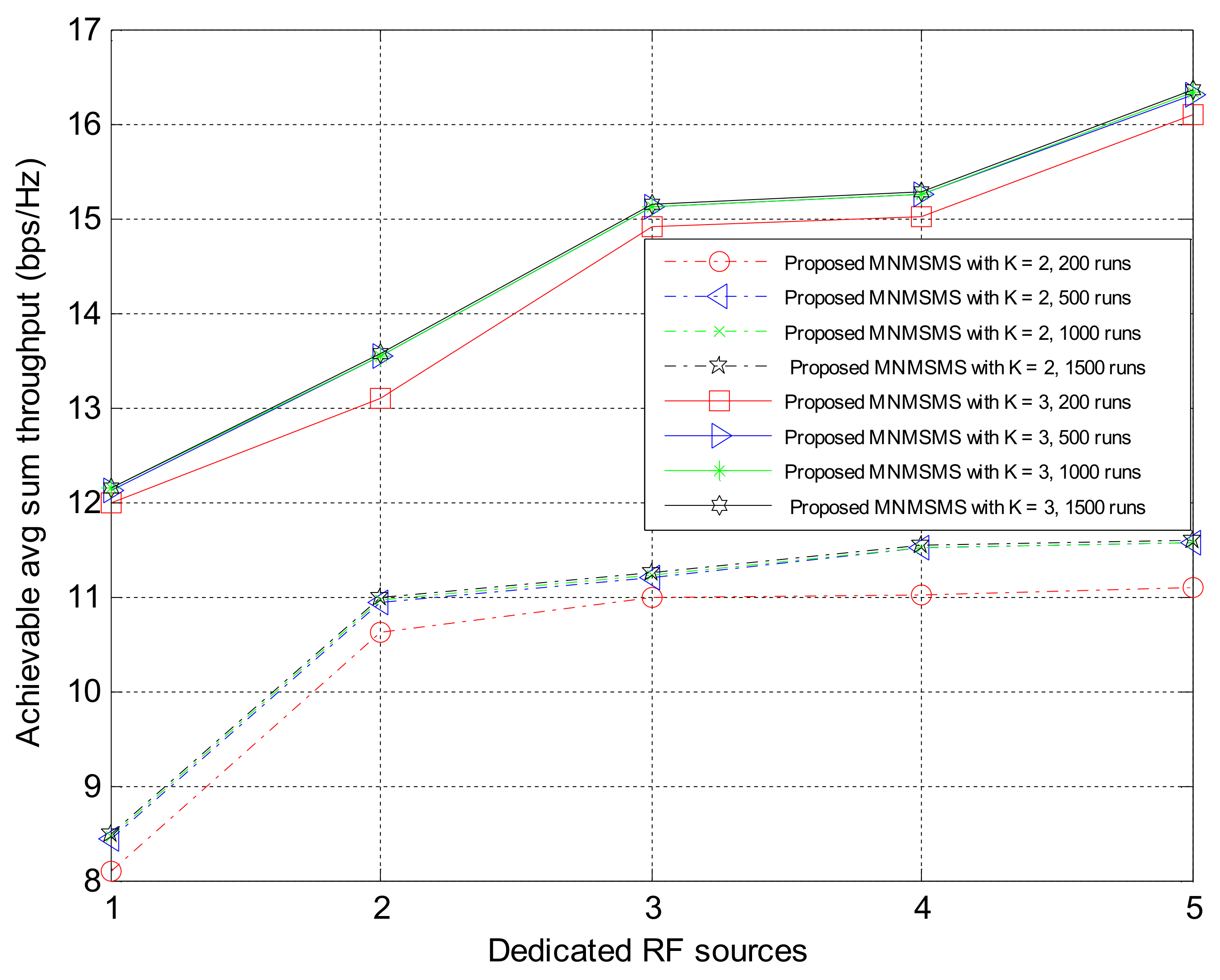
8.1.1. Effect of Run Time on the System-Achievable Sum-Throughput and Fairness
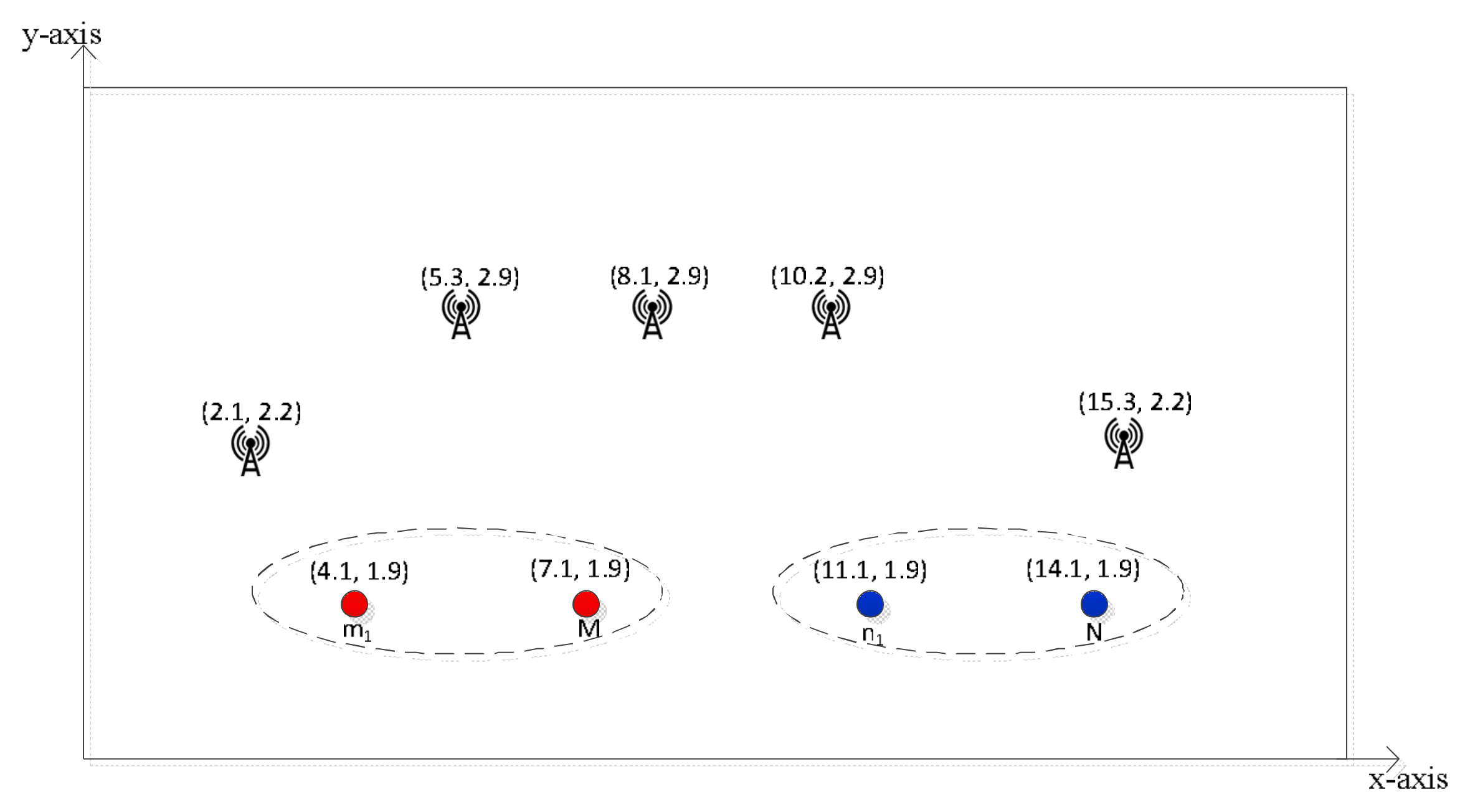
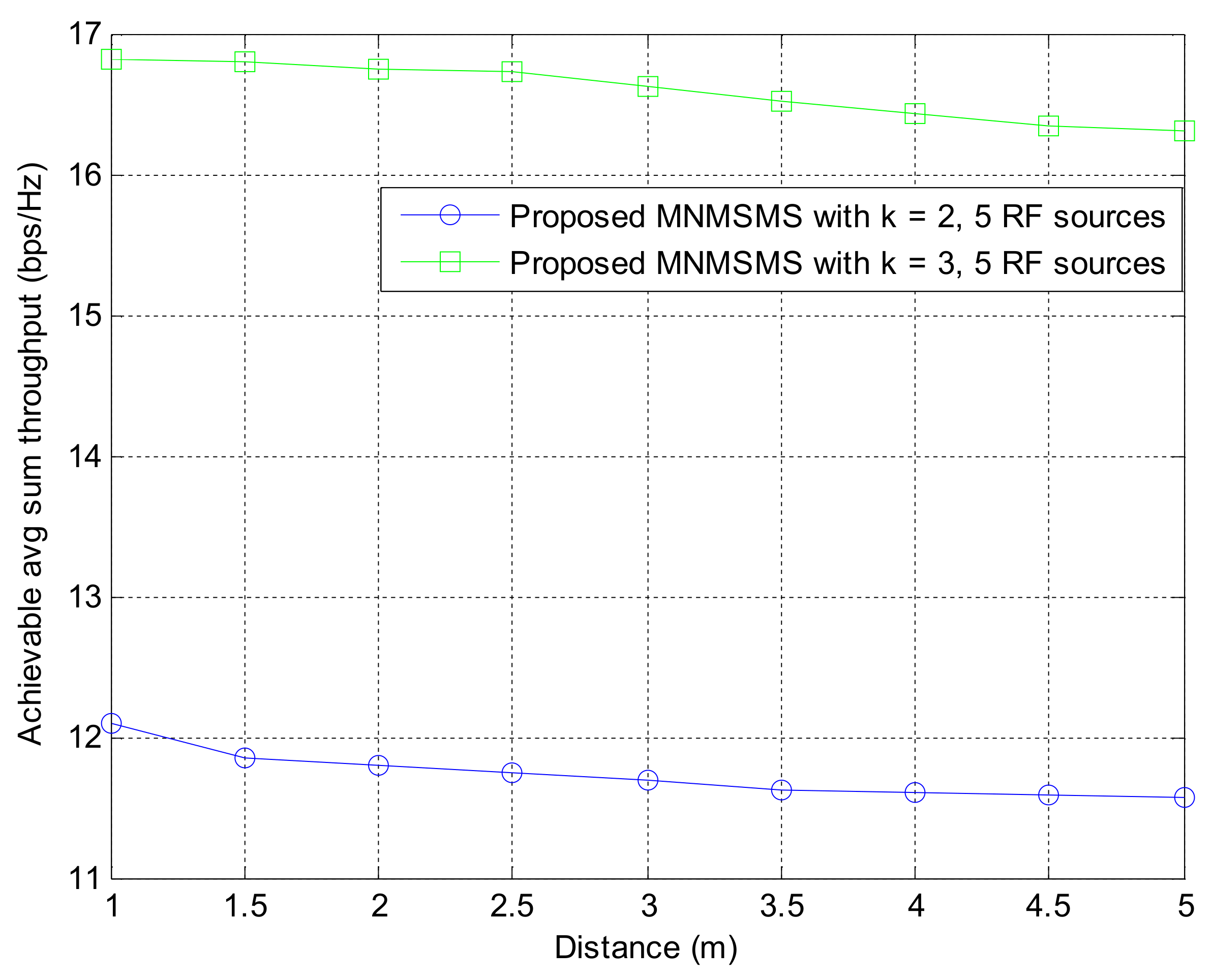
8.1.2. Effect of Network Distance from the Base Station on the System-Achievable Sum-Throughput
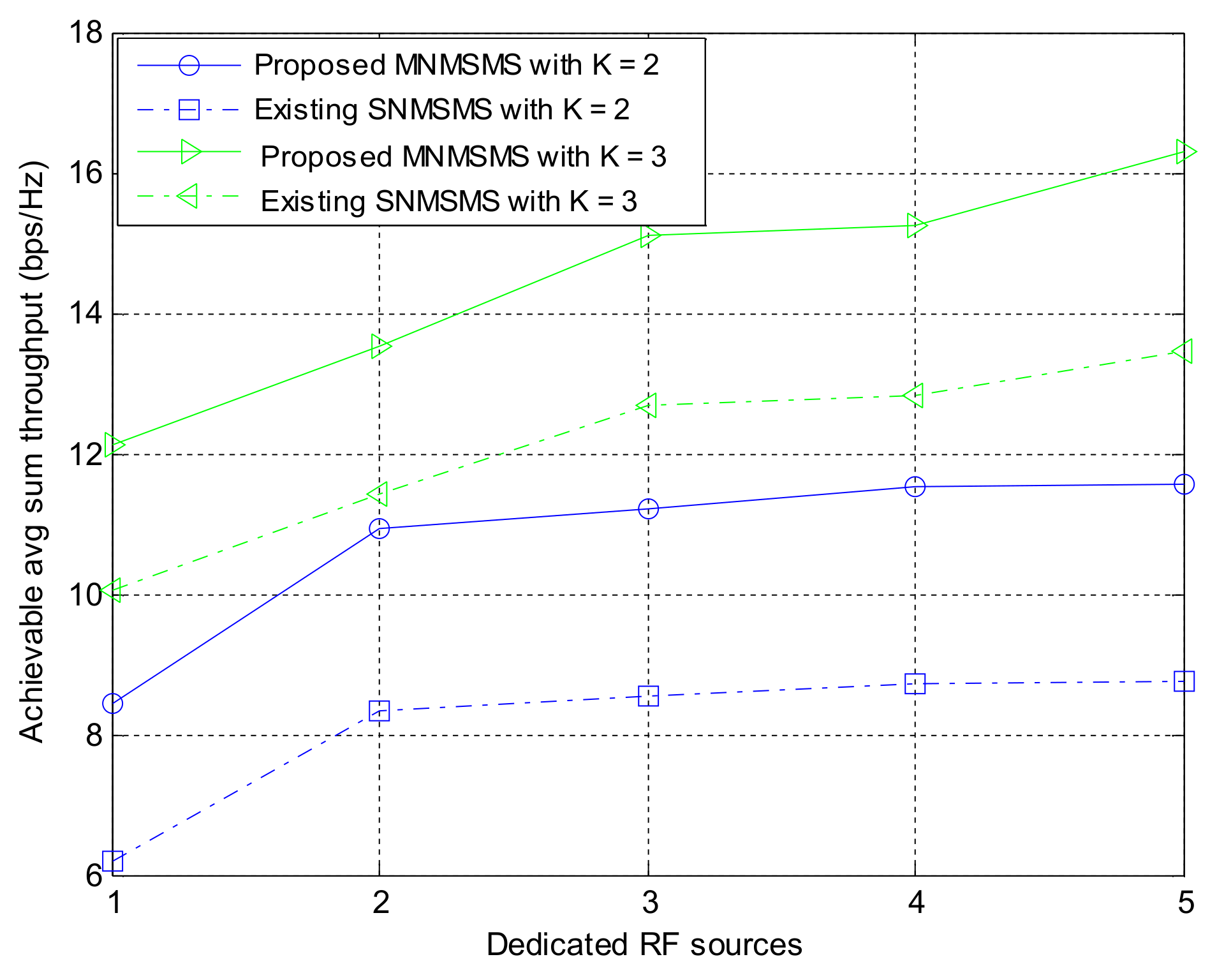
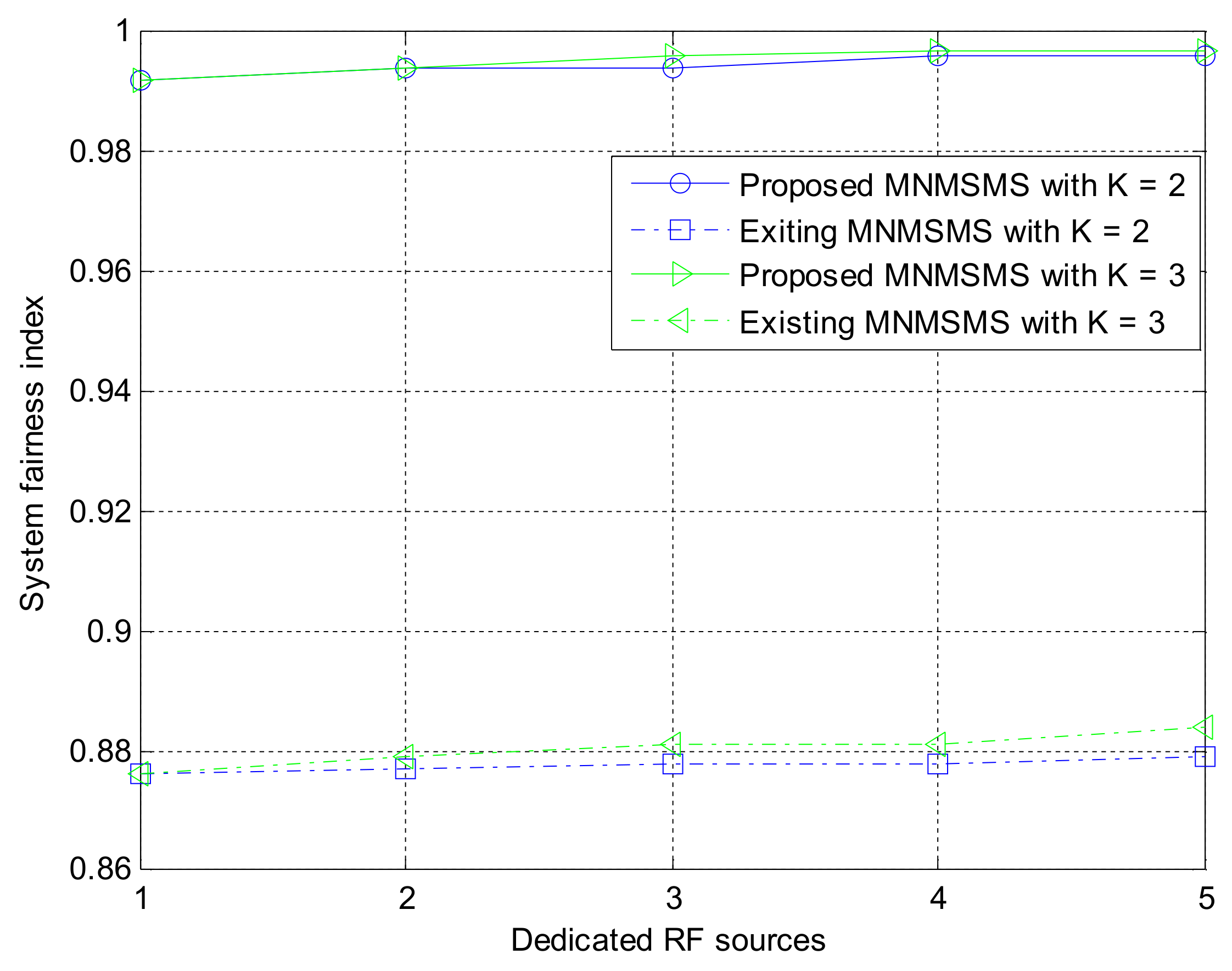
8.1.3. Comparison of Sum-Throughput and Fairness Performance for Different System Configurations
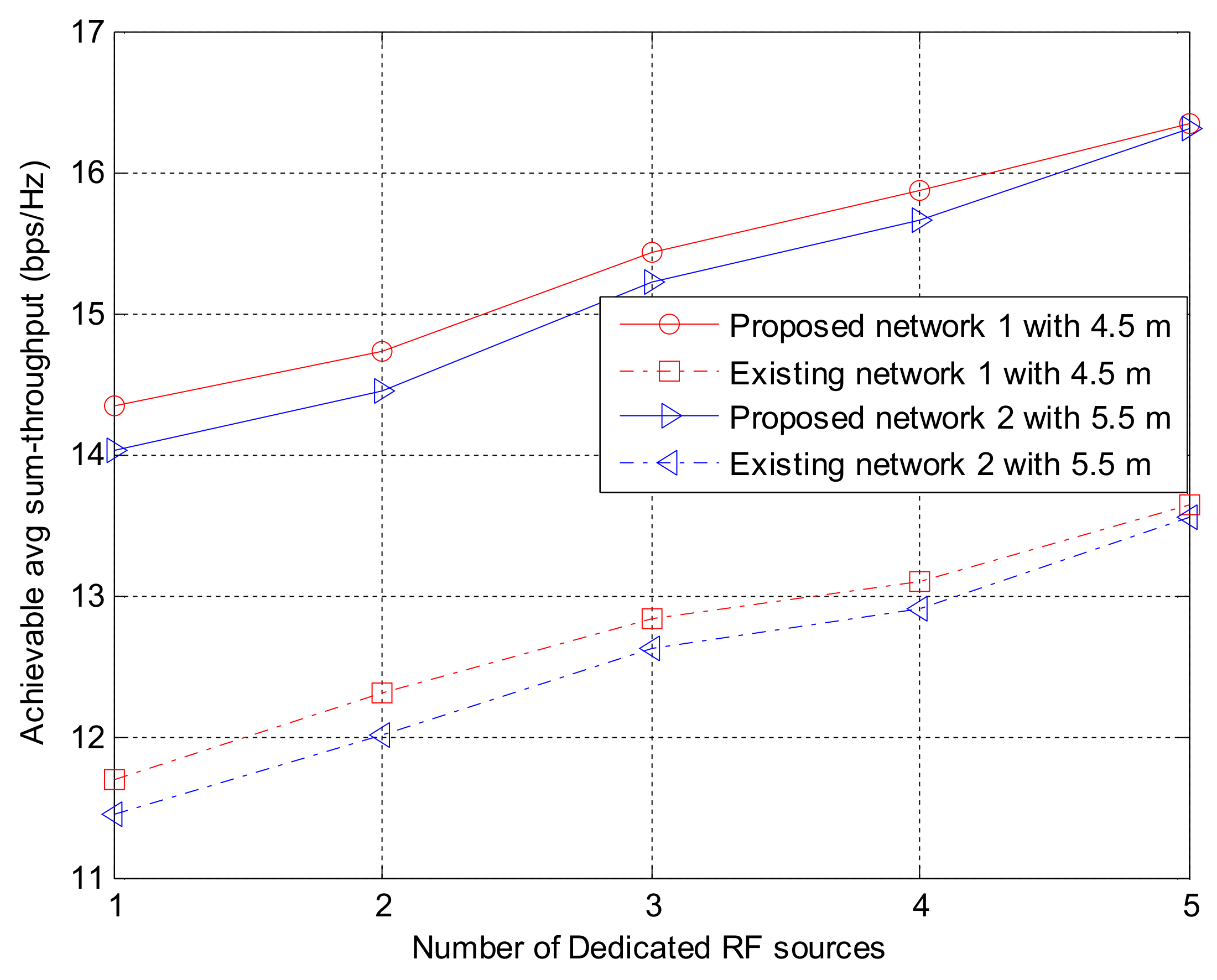
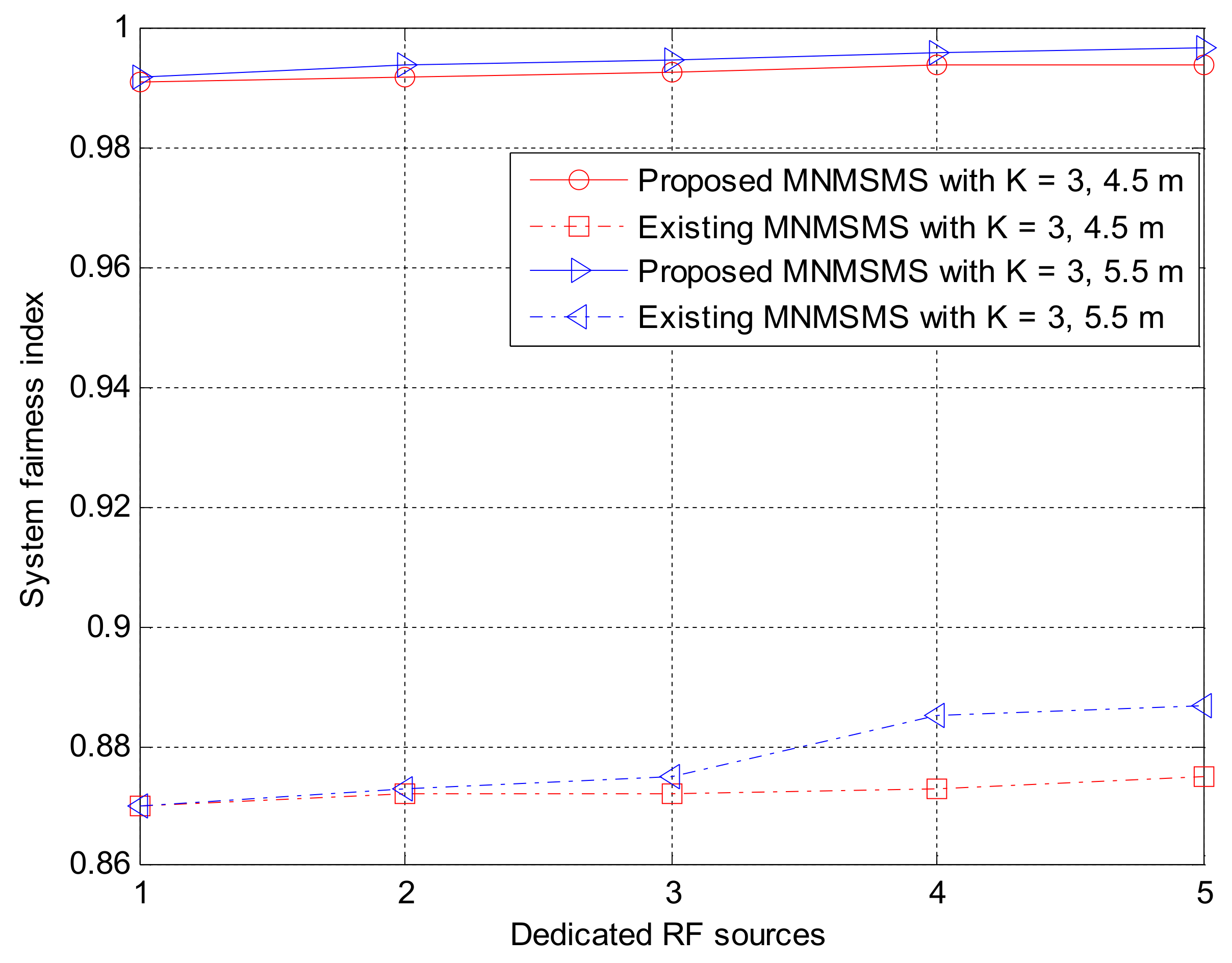
8.1.4. Comparison of the System Performance Dependent on Network Distance from the Base Station
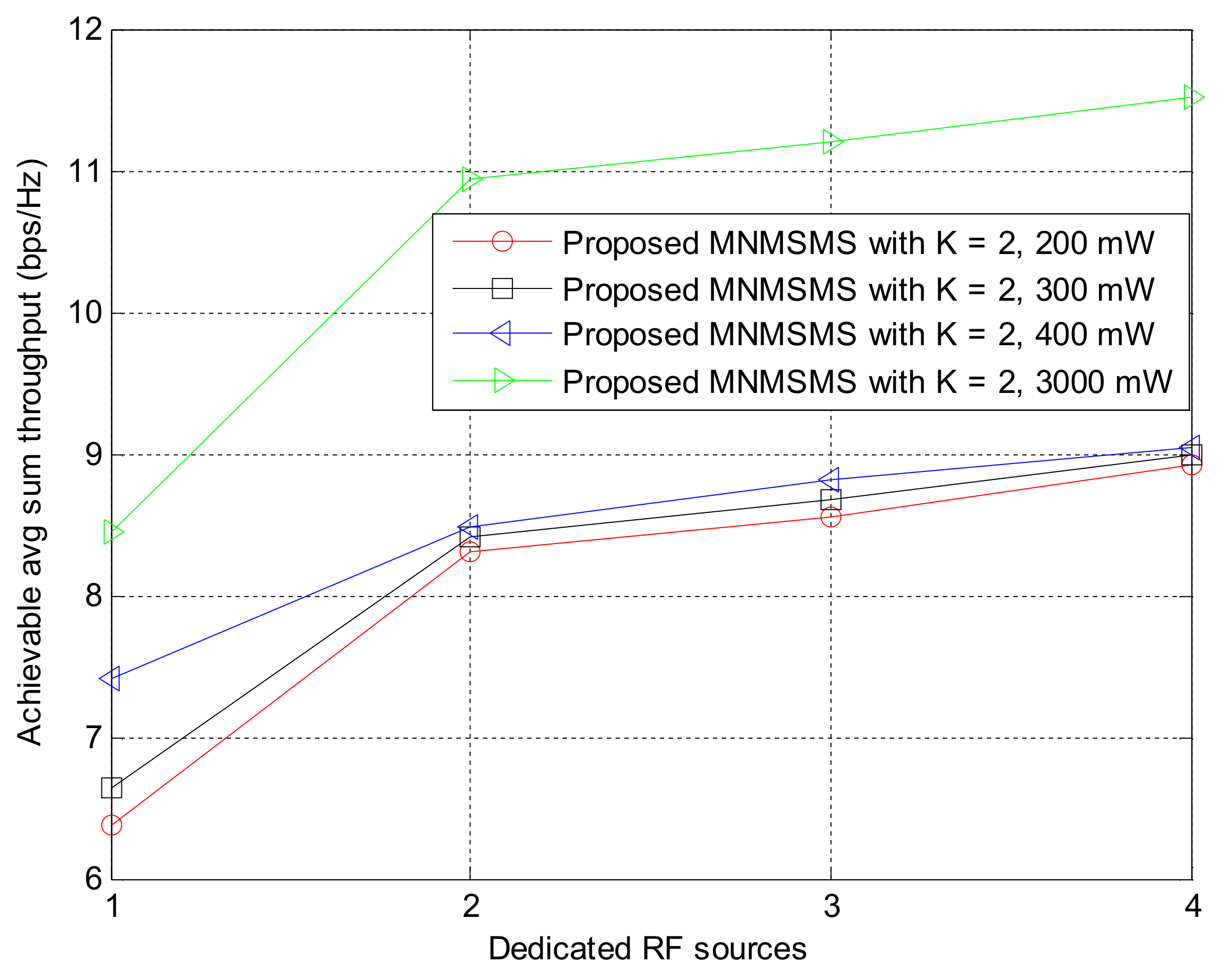
8.1.5. Effect of Transmission Power on the System-Achievable Sum-Throughput
9. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Appendix A
Appendix B
References
- Shu, T.; Xia, M.; Chen, J.; Silva, C.D. An energy efficient adaptive sampling algorithm in a sensor network for automated water quality monitoring. Sensors 2017, 17, 2551. [Google Scholar] [CrossRef] [PubMed]
- Alexander, P.W.; Benedetto, L.T.; Dimitrakopoulos, T.; Hibbert, D.B.; Ngila, J.C.; Sequeira, M.; Shiels, D. Field-portable flow-injection analysers for monitoring of air and water pollution. Talanta 1996, 43, 915–925. [Google Scholar] [CrossRef]
- Huang, X.; Yi, J.; Chen, S.; Zhu, X. A wireless sensor network-based approach with decision support for monitoring lake water quality. Sensors 2015, 15, 29273–29296. [Google Scholar] [CrossRef] [PubMed]
- Xu, Y.; Liu, F. Application of wireless sensor network in water quality monitoring. In Proceedings of the IEEE International Conference Computational Science and Engineering and Embedded and Ubiquitous Computing, Guangzhou, China, 21–24 July 2017. [Google Scholar]
- Jayalakshmi, M.; Gomathi, V. An enhanced underground pipeline water leakage monitoring and detection system using wireless sensor network. In Proceedings of the IEEE International Conference Soft-Computing and Networks Security, Coimbatore, India, 25–27 February 2015. [Google Scholar]
- Balid, W.; Tafish, H.; Refai, H.H. Versatile real-time traffic monitoring system using wireless smart sensor networks. In Proceedings of the IEEE Wireless Communications and Networking Conference, Doha, Qatar, 3–6 April 2016. [Google Scholar]
- Nobar, S.K.; Mehr, K.A.; Niya, J.M.; Tazehkand, B.M. Cognitive radio sensor network with green power beacon. IEEE Sens. J. 2017, 17, 1549–1561. [Google Scholar] [CrossRef]
- Zhang, H.; Du, Q.; Ren, P.; Sun, L. Joint battery-buffer sustainable guarantees in energy-harvesting enabled wireless networks. In Proceedings of the IEEE Global Communication Conference (GLOBECOM), San Diego, CA, USA, 6–10 December 2015. [Google Scholar]
- Shah, G.A.; Alagoz, F.; Fadel, E.A.; Akan, O.B. A spectrum-aware clustering for efficient multimedia routing in cognitive radio sensor networks. IEEE Trans. Veh. Technol. 2014, 63, 3369–3380. [Google Scholar] [CrossRef]
- Diamantoulakis, P.D.; Pappi, K.N.; Karagiannisdis, G.K.; Poor, H.V. Autonomous energy harvesting base stations with minimum storage requirements. IEEE Wirel. Commun. Lett. 2015, 4, 265–268. [Google Scholar] [CrossRef]
- Akhtar, F.; Rehmani, M.H. Energy replenishment using renewable and traditional energy resources for sustainable wireless sensor networks: A survey. Renew. Sustain. Energy Rev. 2015, 45, 769–784. [Google Scholar] [CrossRef]
- Jeon, S.-B.; Kim, S.; Park, S.-J.; Seol, M.-L.; Kim, D.; Chang, Y.K.; Choi, Y.-K. Self-powered electro-coagulation system driven by a wind energy harvesting triboelectric nanogenerator for decentralized water treatment. Nano Energy 2016, 28, 288–295. [Google Scholar] [CrossRef]
- Basagni, S.; Naderi, M.Y.; Petrioli, C.; Spenza, D. Wireless sensor networks with energy harvesting. In Mobile Ad Hoc Networking: The Cutting Edge Directions; John Wiley & Sons: Hoboken, NJ, USA, 2013; pp. 701–736. [Google Scholar]
- Lu, X.; Wang, P.; Niyato, D.; Kim, D.I.; Han, Z. Wireless networks with RF energy harvesting: A contemporary survey. IEEE Commun. Surv. Tutor. 2015, 17, 757–789. [Google Scholar] [CrossRef]
- Diamantoulakis, P.D.; Pappi, K.N.; Ding, Z.; Karagiannidis, G.K. Wireless-powered communications with non-orthogonal multiple access. IEEE Trans. Wirel. Commun. 2016, 15, 8422–8436. [Google Scholar] [CrossRef]
- Cota Transmitter. Available online: http://spectrum.ieee.org/energywise/consumer-electronics/gadgets/ossias-cota-wireless-power-tech-promises-to-enable-the-internet-of-everything (accessed on 8 May 2017).
- Powercast. Available online: www.powercastco.com (accessed on 5 May 2017).
- Powercast. Available online: http://www.powercastsensors.com/products/ wireless-transmitters/ (accessed on 12 January 2018).
- Powercast. Available online: http://www.marketwired.com/press-release/ powercasts-wireless-power-development-kit-with-fcc-approved-transmitter-charges-devices-2221816.htm (accessed on 12 January 2018).
- Xu, W.; Cheng, W.; Zhang, Y.; Shi, Q.; Wang, X. On the optimization model for multi-hop information transmission and energy transfer in TDMA-based wireless sensor networks. IEEE Commun. Lett. 2017, 21, 1095–1098. [Google Scholar] [CrossRef]
- Chen, X.; Zhang, Z.; Chen, H.H.; Zhang, H. Enhancing wireless information and power transfer by exploiting multi-antenna techniques. IEEE Commun. Mag. 2015, 53, 133–141. [Google Scholar] [CrossRef]
- Kwan, J.C.; Abraham, A.O. Radio frequency energy harvesting and data rate optimization in wireless information and power transfer sensor networks. IEEE Sens. J. 2017, 17, 4862–4874. [Google Scholar] [CrossRef]
- Ejaz, W.; Kandeepan, S.; Anpalagan, A. Optimal placement and number of energy transmitters in wireless sensor networks for RF energy transfer. In Proceedings of the IEEE 26th Annual International Symposium Personal, Indoor, Mobile Radio Communication (PIMRC), Hong Kong, China, 30 August–2 September 2015. [Google Scholar]
- Boyd, S.P.; Vandenberghe, L. Convex Optimization; Cambridge University Press: Cambridge, UK, 2009. [Google Scholar]
- Derbew, Y.; Libsie, M. A wireless sensor network framework for large-scale industrial water pollution monitoring. In Proceedings of the IEEE International Conference on IST-Africa Conference, Le Meridien Ile, Maurice, 7–9 May 2014. [Google Scholar]
- Khaleeq, H.; Abou-Einour, A.; Tarique, M. A reliable wireless system for water quality monitoring and level control. Netw. Prot. Alg. 2015, 15, 1–14. [Google Scholar] [CrossRef]
- Parra, L.; Sendra, S.; LIoret, J.; Bosch, I. Development of a conductivity sensor for monitoring groundwater resources to optimize water management in smart city environments. Sensors 2015, 15, 20990–21011. [Google Scholar] [CrossRef] [PubMed]
- Cision Pr Newswire. Available online: https://www.prnewswire.com/news-releases/water-quality-monitoring-market-by-product-type-application-and-region---global-forecast-to-2025-300415533.html (accessed on 15 January 2018).
- Texas Instruments. Available online: http://www.ti.com/product/MSP430F1611 (accessed on 15 January 2018).
- Texas Instruments. Available online: http://www.ti.com/lit/ds/symlink/cc2420.pdf (accessed on 13 April 2018).
- Setiawan, D.; Aziz, A.A.; Kim, D.I.; Choi, K.W. Experiment and modeling of wireless-powered sensor network. In Proceedings of the IEEE Wireless Communications and Networking Conference Workshops (WCNCW), San Francisco, CA, USA, 19–22 March 2017. [Google Scholar]
- Ju, H.; Chang, K.; Lee, M.-S. In-band full-duplex wireless powered communication networks. In Proceedings of the IEEE 17th International Conference on Advanced Communication Technology (ICACT), Seoul, Korea, 1–3 July 2015. [Google Scholar]
- Ling, Z.; Hu, F.; Wang, L.; Yu, J.; Liu, X. Point-to-point wireless information and power transfer in WBAN with energy harvesting. IEEE Access 2017, 5, 8620–8628. [Google Scholar] [CrossRef]
- Ju, H.; Zhang, R. Throughput maximization in wireless powered communication networks. IEEE Trans. Wirel. Commun. 2014, 13, 418–428. [Google Scholar] [CrossRef]
- Carminati, M.; Stefanelli, V.; Sampietro, M.; Turolla, A.; Rossi, M.; Malavasi, S.; Antonelli, M.; Pifferi, V.; Falciola, L. Smart pipe: A miniaturized sensor platform for real-time monitoring of drinking water quality. In Proceedings of the IEEE Workshop on Environmental, Energy, and Structural Monitoring Systems (EESMS), Milan, Italy, 24–25 July 2017. [Google Scholar]
- Shannon, C.E. A mathematical theory of communication. ACM SIGMOBILE Mob. Comp. Commun. Rev. 2001, 5, 3–55. [Google Scholar] [CrossRef]
- Elshaikh, M.A.; Othman, M.; Shamala, S.; Desa, J.M. A new fair marker algorithm for DiffServ networks. Comput. Commun. 2008, 31, 3064–3070. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Transmission power of the dedicated RF sources | 3000 mW |
| Noise power | −114 dBm |
| Energy-harvesting efficiency | 0.5 |
| Fraction of energy used for information transmission | 0.5 |
| Signal-to-noise gap | 1.5 |
| Radio frequency (RF) transceiver frequency | 915 MHz |
| Bandwidth | 1 MHz |
| Path loss exponent | 2 |
| Medium access control | IEEE 802.15.4 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Olatinwo, S.O.; Joubert, T.-H. Optimizing the Energy and Throughput of a Water-Quality Monitoring System. Sensors 2018, 18, 1198. https://doi.org/10.3390/s18041198
Olatinwo SO, Joubert T-H. Optimizing the Energy and Throughput of a Water-Quality Monitoring System. Sensors. 2018; 18(4):1198. https://doi.org/10.3390/s18041198
Chicago/Turabian StyleOlatinwo, Segun O., and Trudi-H. Joubert. 2018. "Optimizing the Energy and Throughput of a Water-Quality Monitoring System" Sensors 18, no. 4: 1198. https://doi.org/10.3390/s18041198
APA StyleOlatinwo, S. O., & Joubert, T. -H. (2018). Optimizing the Energy and Throughput of a Water-Quality Monitoring System. Sensors, 18(4), 1198. https://doi.org/10.3390/s18041198