Mechanical Characterization of Polysilicon MEMS: A Hybrid TMCMC/POD-Kriging Approach




Abstract
:1. Introduction
2. On-Chip Testing Device: Experimental Data and Relevant Scattering
3. Reduced-Order Modelling
3.1. Proper Orthogonal Decomposition
3.2. Kriging Interpolation
4. Transitional Markov Chain Monte Carlo Method for Bayesian Parameter Estimation
5. Results: Parameter Identification via POD-Kriging and TMCMC Analysis
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Appendix A. Transitional Markov Chain Monte Carlo Algorithm
- The first guess for the intermediate PDF is defined as the prior of parameters . It is assumed in a form that allows sampling to obtain , .
- The values of the tempering parameters are initially chosen such that the coefficient of variation for , , attains a prescribed tolerance allowing elitism diversification (see [48]).
- Samples, , are generated adopting the Metropolis–Hastings algorithm. The k-th sample is drawn from a Markov chain that starts from a so-called sample leader, which is equal to one of the samples , ; the probability of the leader to be is given by the normalized weight . The algorithm adopts a Gaussian proposal PDF centered at the current sample in the l-th chain, featuring a covariance matrix given by:where:A scaling parameter can be adopted for , in order to suppresses the rejection rate while dealing with large MCMC jumps (see [63]).
- Steps (1) to (3) are repeated until , and the available data are fully plugged into the posterior distribution update.
References
- Choudhary, V.; Iniewski, K. MEMS: Fundamental Technology and Applications; CRC Press: Boca Raton, FL, USA, 2013. [Google Scholar]
- Wang, L.; Stroud, C.; Touba, N. System-on-Chip Test Architectures: Nanometer Design for Testability; Morgan Kaufmann: Burlington, MA, USA, 2010. [Google Scholar]
- Li, F.; Clark, J. Self-calibration for MEMS with comb drives: Measurement of gap. J. Microelectromech. Syst. 2012, 21, 1019–1021. [Google Scholar] [CrossRef]
- Brand, O.; Fedder, G.; Hierold, C.; Korvink, J.; Tabata, O.; Tsuchiya, T. Reliability of MEMS: Testing of Materials and Devices; John Wiley & Sons: Hoboken, NJ, USA, 2013. [Google Scholar]
- Pantano, M.; Espinosa, H.; Pagnotta, L. Mechanical characterization of materials at small length scales. J. Mech. Sci. Technol. 2012, 26, 545–561. [Google Scholar] [CrossRef]
- Corigliano, A.; Ardito, R.; Comi, C.; Frangi, A.; Ghisi, A.; Mariani, S. Mechanics of Microsystems; John Wiley and Sons: Hoboken, NJ, USA, 2018. [Google Scholar]
- Sukumar, N.; Srolovitz, D.; Baker, T.; Prevost, J.H. Brittle fracture in polycrystalline microstructures with the extended finite element method. Int. J. Numer. Methods Eng. 2003, 56, 2015–2037. [Google Scholar] [CrossRef]
- Paggi, M.; Corrado, M.; Reinoso, J. Fracture of solar-grade anisotropic polycrystalline Silicon: A combined phase field-cohesive zone model approach. Comput. Methods Appl. Mech. Eng. 2018, 330, 123–148. [Google Scholar] [CrossRef]
- Mariani, S.; Martini, R.; Ghisi, A.; Corigliano, A.; Simoni, B. Monte Carlo simulation of micro-cracking in polysilicon MEMS exposed to shocks. Int. J. Fract. 2011, 167, 83–101. [Google Scholar] [CrossRef]
- Hong, Y.; Lee, J.; Kim, S. Laterally driven symmetric micro-resonator for gyroscopic applications. J. Micromech. Microeng. 2000, 10, 452–458. [Google Scholar] [CrossRef]
- Li, F.; Peroulis, D.; Clark, J. Measuring effective flexure width by measuring comb drive capacitance. J. Microelectromech. Syst. 2014, 23, 972–979. [Google Scholar] [CrossRef]
- Brito, N.; Ferreira, C.; Alves, F.; Cabral, J.; Gaspar, J.; Monteiro, J.; Rocha, L. Digital Platform for Wafer-Level MEMS Testing and Characterization Using Electrical Response. Sensors 2016, 16, 1553. [Google Scholar] [CrossRef] [PubMed]
- Ballarini, R.; Mullen, R.; Heuer, A. The effects of heterogeneity and anisotropy on the size effect in cracked polycrystalline films. In Fracture Scaling; Springer: New York, NY, USA, 1999; pp. 19–39. [Google Scholar]
- Mariani, S.; Martini, R.; Ghisi, A.; Corigliano, A.; Beghi, M. Overall elastic properties of polysilicon films: A statistical investigation of the effects of polycrystal morphology. Int. J. Multiscale Comput. Eng. 2011, 9, 327–346. [Google Scholar] [CrossRef]
- Cho, S.; Chasiotis, I. Elastic properties and representative volume element of polycrystalline silicon for MEMS. Exp. Mech. 2007, 47, 37–49. [Google Scholar] [CrossRef]
- Pineau, A.; Benzerga, A.; Pardoen, T. Failure of metals III: Fracture and fatigue of nanostructured metallic materials. Acta Mater. 2016, 107, 508–544. [Google Scholar] [CrossRef]
- Lucon, E. Testing of Small-Sized Specimens. Compr. Mater. Process. 2014, 1, 135–163. [Google Scholar]
- Del Rio, F.; Cook, R.; Boyce, B. Fracture strength of micro-and nano-scale silicon components. Appl. Phys. Rev. 2015, 2, 021303. [Google Scholar] [CrossRef]
- Nyyssonen, D.; Larrabee, R. Submicrometer linewidth metrology in the optical microscope. J. Res. Natl. Bur. Stand. 1987, 92, 187. [Google Scholar] [CrossRef]
- Pryputniewicz, R. Optoelectronic method for device characterization and experimental validation of operational performance. In Fringe 2009, Proceedings of the 6th International Workshop on Advanced Optical Metrology; Springer: Berlin, Germany, 2009; pp. 534–541. [Google Scholar]
- Hanhijarvi, K.; Kassamakov, I.; Heikkinen, V.; Aaltonen, J.; Sainiemi, L.; Grigoras, K.; Franssila, S.; Haeggstrom, E. Stroboscopic supercontinuum white-light interferometer for MEMS characterization. Opt. Lett. 2012, 37, 1703–1705. [Google Scholar] [CrossRef] [PubMed]
- Gennat, M.; Meinig, M.; Shaporin, A.; Kurth, S.; Rembe, C.; Tibken, B. Determination of parameters with uncertainties for quality control in MEMS fabrication. J. Microelectromech. Syst. 2013, 22, 613–624. [Google Scholar] [CrossRef]
- Mirzazadeh, R.; Eftekhar Azam, S.; Mariani, S. Micromechanical Characterization of Polysilicon Films through On-Chip Tests. Sensors 2016, 16, 1191. [Google Scholar] [CrossRef] [PubMed]
- Mirzazadeh, R.; Mariani, S. Uncertainty quantification of microstructure-governed properties of polysilicon MEMS. Micromachines 2017, 8, 248. [Google Scholar] [CrossRef]
- Mirzazadeh, R.; Ghisi, A.; Mariani, S. Statistical investigation of the mechanical and geometrical properties of polysilicon films through on-chip tests. Micromachines 2018, 9, 53. [Google Scholar] [CrossRef]
- Fossati, M.; Habashi, W. Multiparameter analysis of aero-icing problems using proper orthogonal decomposition and multidimensional interpolation. AIAA J. 2013, 51, 946–960. [Google Scholar] [CrossRef]
- Degroote, J.; Vierendeels, J.; Willcox, K. Interpolation among reduced-order matrices to obtain parameterized models for design, optimization and probabilistic analysis. Int. J. Numer. Methods Fluids 2010, 63, 207–230. [Google Scholar] [CrossRef] [Green Version]
- Xiong, X.; Wu, Y.L.; Jone, W.B. A dual-mode built-in self-test technique for capacitive MEMS devices. IEEE Trans. Instrum. Measur. 2005, 54, 1739–1750. [Google Scholar] [CrossRef]
- Corigliano, A.; De Masi, B.; Frangi, A.; Comi, C.; Villa, A.; Marchi, M. Mechanical characterization of polysilicon through on-chip tensile tests. J. Microelectromech. Syst. 2004, 13, 200–219. [Google Scholar] [CrossRef]
- Mirzazadeh, R. Micromechanical Characterization of Polysilicon Films: On-Chip Testing, Multi-Uncertainty Quantification and Bayesian Inverse Modelling. Ph.D. Thesis, Politecnico di Milano, Milan, Italy, 2017. [Google Scholar]
- Mirzazadeh, R.; Ghisi, A.; Mariani, S. Assessment of overetch and polysilicon film properties through on-chip tests. In Proceedings of the 2nd International Electronic Conference on Sensors and Applications, 15–30 November 2015; pp. 1–7. [Google Scholar]
- Mirzazadeh, R.; Mariani, S. Assessment of micromechanically-induced uncertainties in the electromechanical response of MEMS devices. In Proceedings of the 3rd International Electronic Conference on Sensors and Applications, 15–30 November 2016; pp. 1–6. [Google Scholar]
- Beck, J.; Katafygiotis, L. Updating models and their uncertainties. I: Bayesian statistical framework. J. Eng. Mech. 1998, 124, 455–461. [Google Scholar] [CrossRef]
- Muto, M.; Beck, J. Bayesian updating and model class selection for hysteretic structural models using stochastic simulation. J. Vib. Control 2008, 14, 7–34. [Google Scholar] [CrossRef]
- Benner, P.; Gugercin, S.; Willcox, K. A survey of projection-based model reduction methods for parametric dynamical systems. SIAM Rev. 2015, 57, 483–531. [Google Scholar] [CrossRef]
- Ojo, S.; Budarapu, P.; Paggi, M. A nonlocal adaptive discrete empirical interpolation method combined with modified hp-refinement for order reduction of molecular dynamics systems. Comput. Mater. Sci. 2017, 140, 189–208. [Google Scholar] [CrossRef]
- Eftekhar Azam, S.; Mariani, S. Investigation of computational and accuracy issues in POD-based reduced order modeling of dynamic structural systems. Eng. Struct. 2013, 54, 150–167. [Google Scholar] [CrossRef]
- Capellari, G.; Chatzi, E.; Mariani, S. Structural Health Monitoring Sensor Network Optimization through Bayesian Experimental Design. ASCE-ASME J. Risk Uncertain. Eng. Syst. Part A Civ. Eng. 2018, 4, 04018016. [Google Scholar] [CrossRef]
- Berkooz, G.; Holmes, P.; Lumley, J. The proper orthogonal decomposition in the analysis of turbulent flows. Annu. Rev. Fluid Mech. 1993, 25, 539–575. [Google Scholar] [CrossRef]
- Eftekhar Azam, S. Online Damage Detection in Structural Systems: Applications of Proper Orthogonal Decomposition, and Kalman and Particle Filters; Springer Science & Business Media: New York, NY, USA, 2014. [Google Scholar]
- Mariani, S.; Eftekhar Azam, S.; Ghisi, A.; Corigliano, A.; Simoni, B. Reduced order modelling of MEMS dynamics. In Proceedings of the DTIP 2011 Symposium on Design, Test, Integration and Packaging of MEMS/MOEMS, Aix-en-Provence, France, 11–13 May 2011; pp. 53–58. [Google Scholar]
- Lenaerts, V.; Kerschen, G.; Golinval, J. Proper orthogonal decomposition for model updating of non-linear mechanical systems. Mech. Syst. Signal Process. 2001, 15, 31–43. [Google Scholar] [CrossRef]
- Eftekhar Azam, S.; Mariani, S.; Attari, N. Online damage detection via a synergy of proper orthogonal decomposition and recursive Bayesian filters. Nonlinear Dynam. 2017, 89, 1489–1511. [Google Scholar] [CrossRef]
- Manzoni, A.; Quarteroni, A.; Rozza, G. Computational reduction for parametrized PDEs: Strategies and applications. Milan J. Math. 2012, 80, 283–309. [Google Scholar] [CrossRef]
- Jin, R.; Du, X.; Chen, W. The use of metamodeling techniques for optimization under uncertainty. Struct. Multidiscip. Optim. 2003, 25, 99–116. [Google Scholar] [CrossRef]
- Dubourg, V.; Sudret, B.; Bourinet, J. Reliability-based design optimization using kriging surrogates and subset simulation. Struct. Multidiscip. Optim. 2011, 44, 673–690. [Google Scholar] [CrossRef]
- Putter, H.; Young, G. On the effect of covariance function estimation on the accuracy of kriging predictors. Bernoulli 2001, 7, 421–438. [Google Scholar] [CrossRef]
- Angelikopoulos, P.; Papadimitriou, C.; Koumoutsakos, P. X-TMCMC: Adaptive kriging for Bayesian inverse modeling. Comput. Methods Appl. Mech. Eng. 2015, 289, 409–428. [Google Scholar] [CrossRef]
- Dubourg, V.; Sudret, B.; Deheeger, F. Metamodel-based importance sampling for structural reliability analysis. Probab. Eng. Mech. 2013, 33, 47–57. [Google Scholar] [CrossRef]
- Lophaven, S.; Nielsen, H.; Søndergaard, J. DACE—A Matlab Kriging Toolbox, version 2.0; Technical Report IMM-REP-2002-12; Technical University of Denmark: Lyngby, Denmark, 2002. [Google Scholar]
- Capellari, G.; Eftekhar Azam, S.; Mariani, S. Damage Detection in Flexible Plates through Reduced-Order Modeling and Hybrid Particle-Kalman Filtering. Sensors 2016, 16, 2. [Google Scholar] [CrossRef] [PubMed]
- Buljak, V.; Maier, G. Proper orthogonal decomposition and radial basis functions in material characterization based on instrumented indentation. Eng. Struct. 2011, 33, 492–501. [Google Scholar] [CrossRef]
- McKay, M.; Beckman, R.; Conover, W. A comparison of three methods for selecting values of input variables in the analysis of output from a computer code. Technometrics 2000, 42, 55–61. [Google Scholar] [CrossRef]
- Halton, J. On the efficiency of certain quasi-random sequences of points in evaluating multi-dimensional integrals. Numer. Math. 1960, 2, 84–90. [Google Scholar] [CrossRef]
- Sobol, I. On the distribution of points in a cube and the approximate evaluation of integrals. Zhurnal Vychislitel. Mat. Mat. Fiziki 1967, 7, 784–802. [Google Scholar] [CrossRef]
- Leblond, C.; Sigrist, J. A reduced basis approach for the parametric low frequency response of submerged viscoelastic structures. Finite Elements Anal. Des. 2016, 119, 15–29. [Google Scholar] [CrossRef]
- Smolyak, S. Quadrature and interpolation formulas for tensor products of certain classes of functions. Dokl. Akad. Nauk SSSR 1963, 4, 240–243. [Google Scholar]
- Margheri, L.; Sagaut, P. An uncertainty quantification analysis in a simplified problem of urban pollutant dispersion by means of ANOVA-POD/Kriging-based response surfaces. In Proceedings of the ASME-FEDSM, Chicago, IL, USA, 3–7 August 2014; pp. 3–7. [Google Scholar]
- Axerio, J.; Wang, Q.; Iaccarino, G. Constructing Response Surfaces Using Imperfect Function Evaluations. In Proceedings of the 51st AIAA/ASME/ASCE/AHS/ASC Structures, Structural Dynamics, and Materials Conference, Orlando, FL, USA, 12–15 April 2010; p. 2925. [Google Scholar]
- Bank, R.; Dupont, T.; Yserentant, H. The hierarchical basis multigrid method. Numer. Math. 1988, 52, 427–458. [Google Scholar] [CrossRef]
- Barthelmann, V.; Novak, E.; Ritter, K. High dimensional polynomial interpolation on sparse grids. Adv. Comput. Math. 2000, 12, 273–288. [Google Scholar] [CrossRef]
- Klimke, A. Sparse Grid Interpolation Toolbox-User’s Guide; IANS Report; University of Stuttgart: Stuttgart, Germany, 2007; Volume 17. [Google Scholar]
- Ching, J.; Chen, Y. Transitional Markov chain Monte Carlo method for Bayesian model updating, model class selection, and model averaging. J. Eng. Mech. 2007, 133, 816–832. [Google Scholar] [CrossRef]
- Green, P.; Worden, K. Bayesian and Markov chain Monte Carlo methods for identifying nonlinear systems in the presence of uncertainty. Philos. Trans. R. Soc. A Math. Phys. Eng. Sci. 2015, 373, 20140405. [Google Scholar] [CrossRef] [PubMed]
- Yuen, K. Bayesian Methods for Structural Dynamics and Civil Engineering; John Wiley & Sons: Hoboken, NJ, USA, 2010. [Google Scholar]
- Simoen, E.; Papadimitriou, C.; Lombaert, G. On prediction error correlation in Bayesian model updating. J. Sound Vib. 2013, 332, 4136–4152. [Google Scholar] [CrossRef]
- Kirkpatrick, S. Optimization by simulated annealing: Quantitative studies. J. Stat. Phys. 1984, 34, 975–986. [Google Scholar] [CrossRef]
- Doucet, A.; Johansen, A. A tutorial on particle filtering and smoothing: Fifteen years later. Handb. Nonlinear Filter. 2009, 12, 656–704. [Google Scholar]
- Metropolis, N.; Rosenbluth, A.; Rosenbluth, M.; Teller, A.; Teller, E. Equation of state calculations by fast computing machines. J. Chem. Phys. 1953, 21, 1087–1092. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| beam length | 20 m |
| beam width | 2 m |
| out-of-plane beam thickness | 22 m |
| initial gap at capacitors | 2 m |
| conductor length | 83 m |
| plate side length | 200 m |
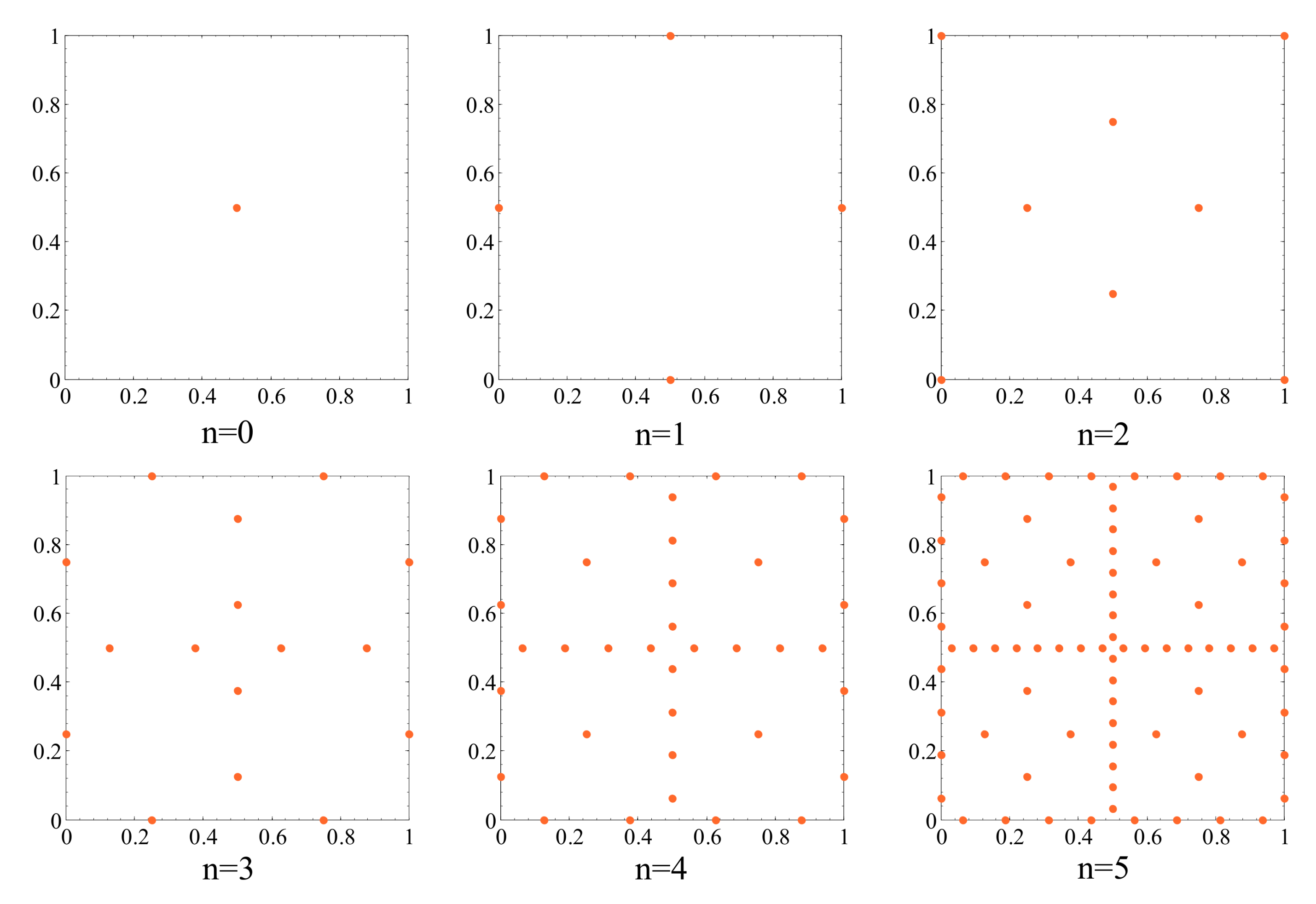
| d | 0 | 1 | 2 | 3 | 4 | 5 |
|---|---|---|---|---|---|---|
| FE analyses | 1 | 5 | 13 | 29 | 65 | 145 |
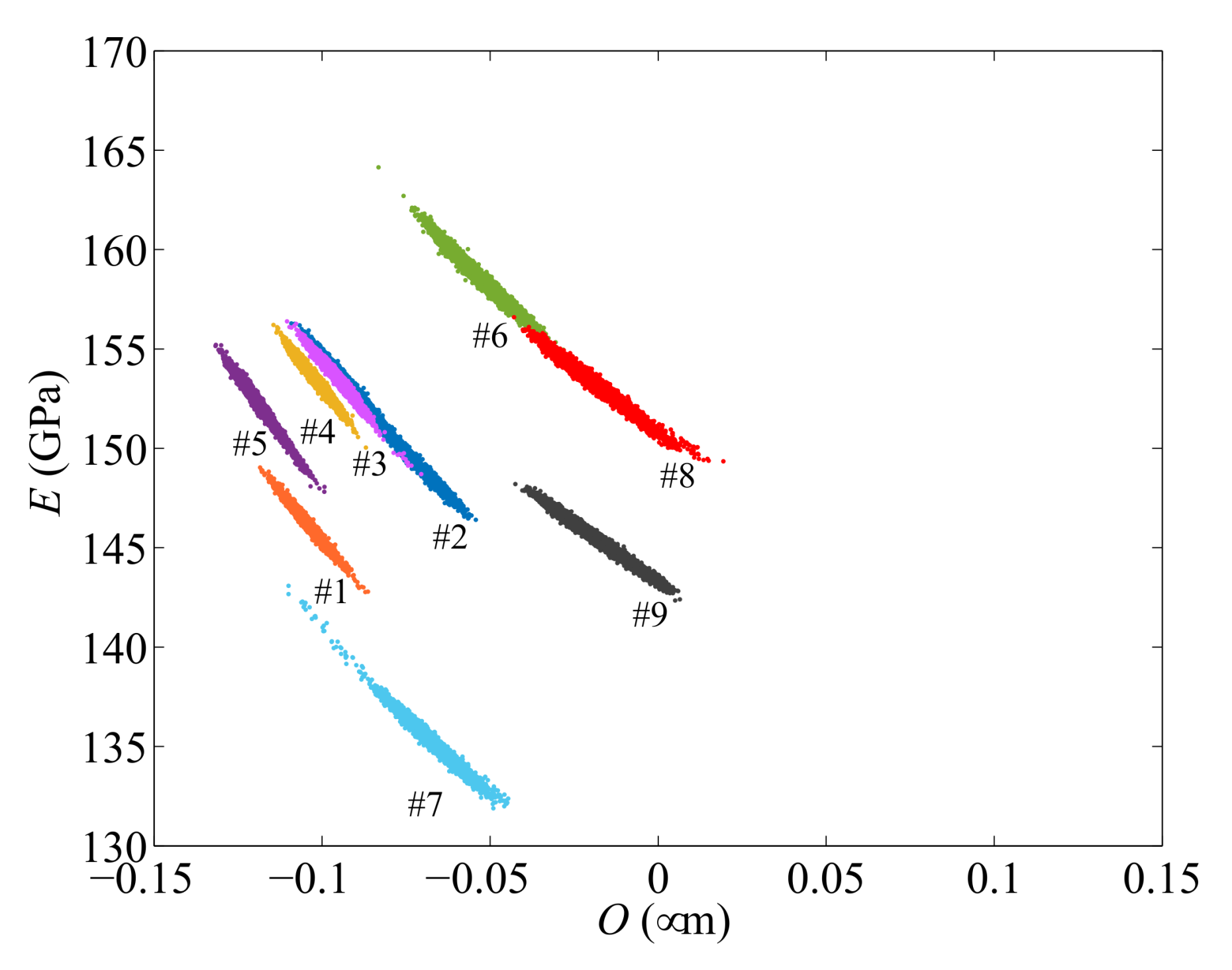
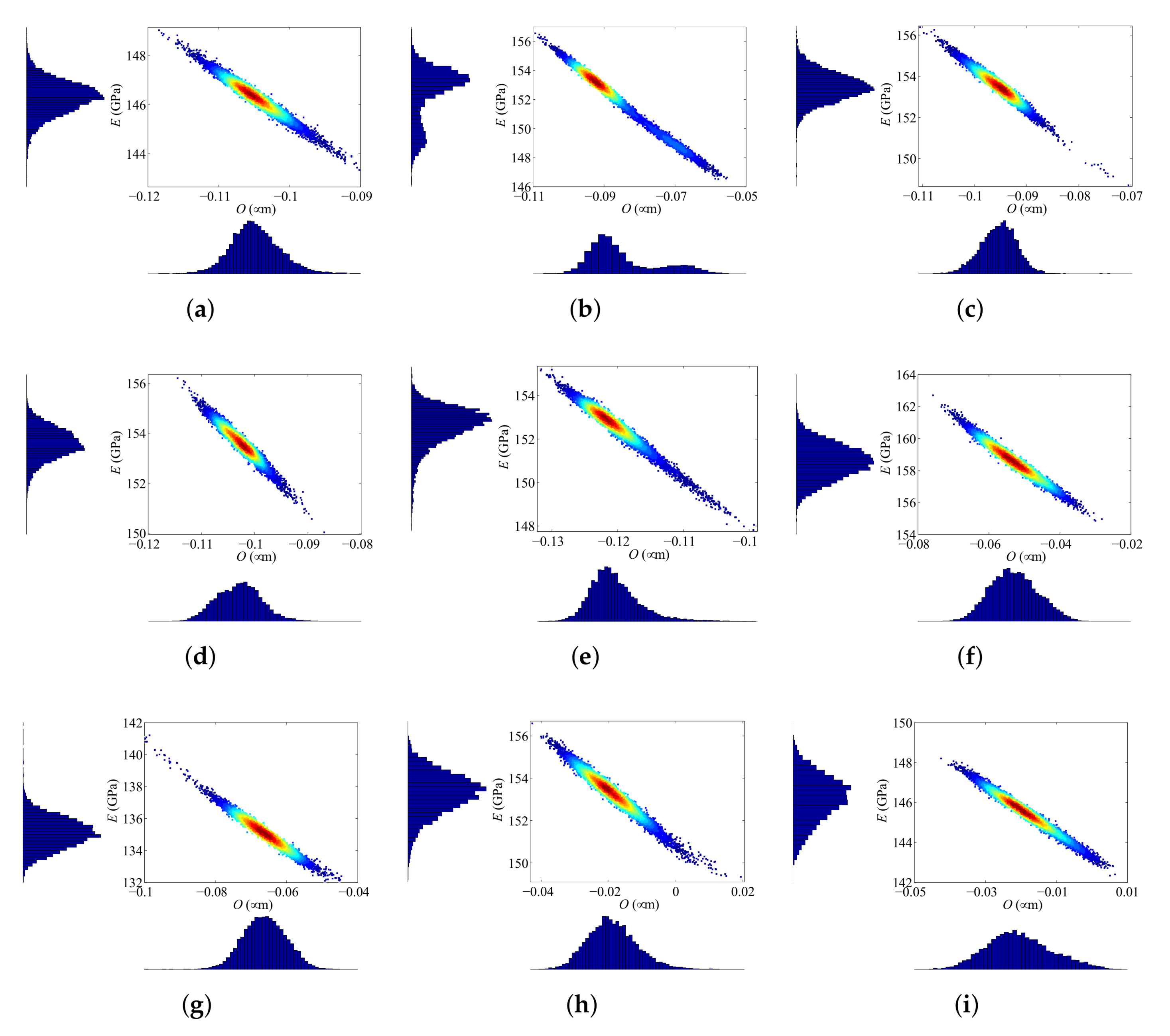
| Specimen # | (m) | (m) | (GPa) | (GPa) |
|---|---|---|---|---|
| 1 | −0.106 | 0.0035 | 146.30 | 0.703 |
| 2 | −0.092 | 0.0097 | 153.28 | 1.870 |
| 3 | −0.095 | 0.0035 | 153.49 | 0.713 |
| 4 | −0.102 | 0.0030 | 153.50 | 0.637 |
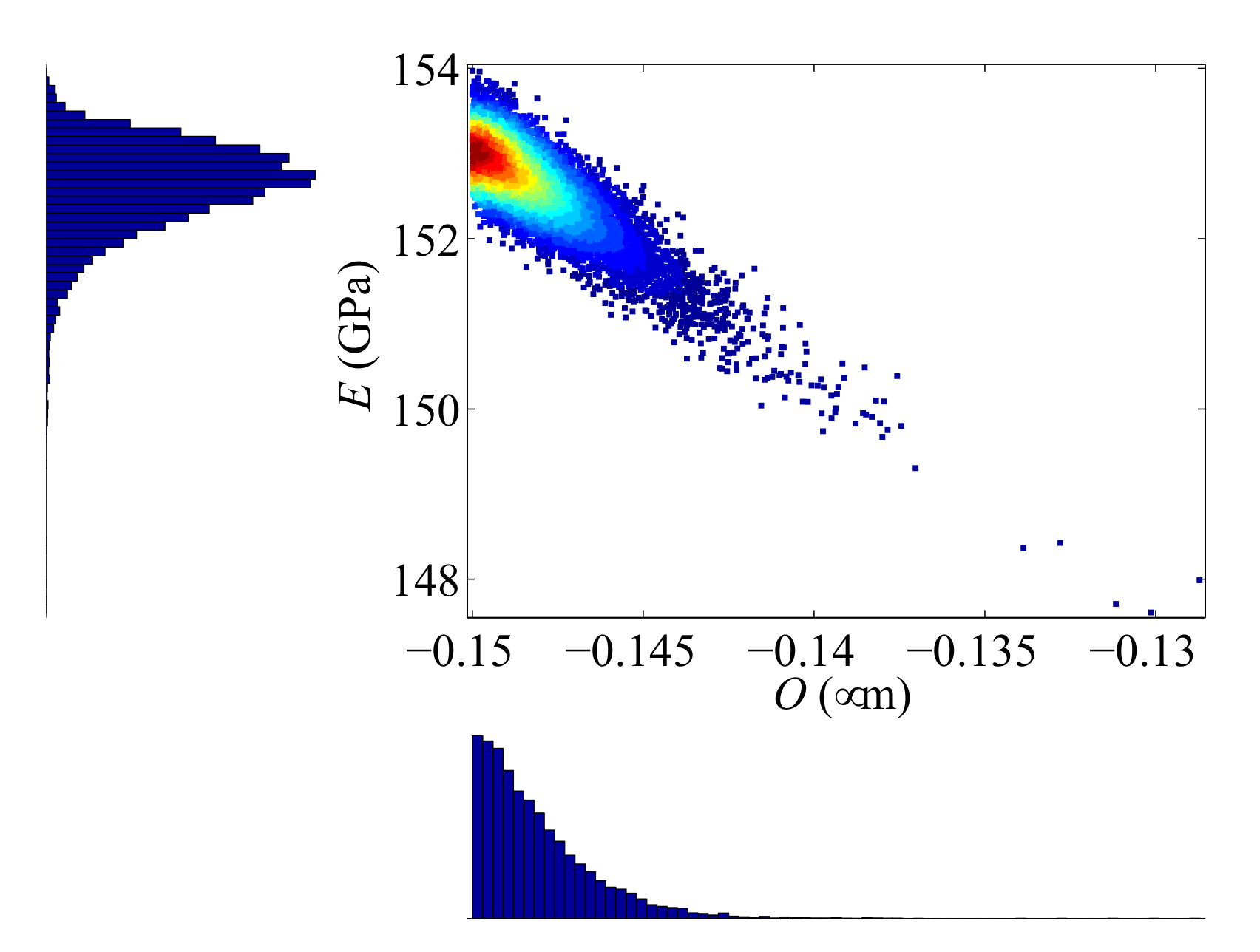
| 5 | −0.122 | 0.0038 | 152.96 | 0.896 |
| 6 | −0.053 | 0.0067 | 158.65 | 1.069 |
| 7 | −0.067 | 0.0063 | 135.06 | 1.010 |
| 8 | −0.020 | 0.0074 | 153.49 | 0.977 |
| 9 | −0.020 | 0.0077 | 145.68 | 0.927 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mirzazadeh, R.; Eftekhar Azam, S.; Mariani, S. Mechanical Characterization of Polysilicon MEMS: A Hybrid TMCMC/POD-Kriging Approach. Sensors 2018, 18, 1243. https://doi.org/10.3390/s18041243
Mirzazadeh R, Eftekhar Azam S, Mariani S. Mechanical Characterization of Polysilicon MEMS: A Hybrid TMCMC/POD-Kriging Approach. Sensors. 2018; 18(4):1243. https://doi.org/10.3390/s18041243
Chicago/Turabian StyleMirzazadeh, Ramin, Saeed Eftekhar Azam, and Stefano Mariani. 2018. "Mechanical Characterization of Polysilicon MEMS: A Hybrid TMCMC/POD-Kriging Approach" Sensors 18, no. 4: 1243. https://doi.org/10.3390/s18041243
APA StyleMirzazadeh, R., Eftekhar Azam, S., & Mariani, S. (2018). Mechanical Characterization of Polysilicon MEMS: A Hybrid TMCMC/POD-Kriging Approach. Sensors, 18(4), 1243. https://doi.org/10.3390/s18041243