Nonlinear Blind Compensation for Array Signal Processing Application


Abstract
:1. Introduction
2. System Model and Problem Analysis
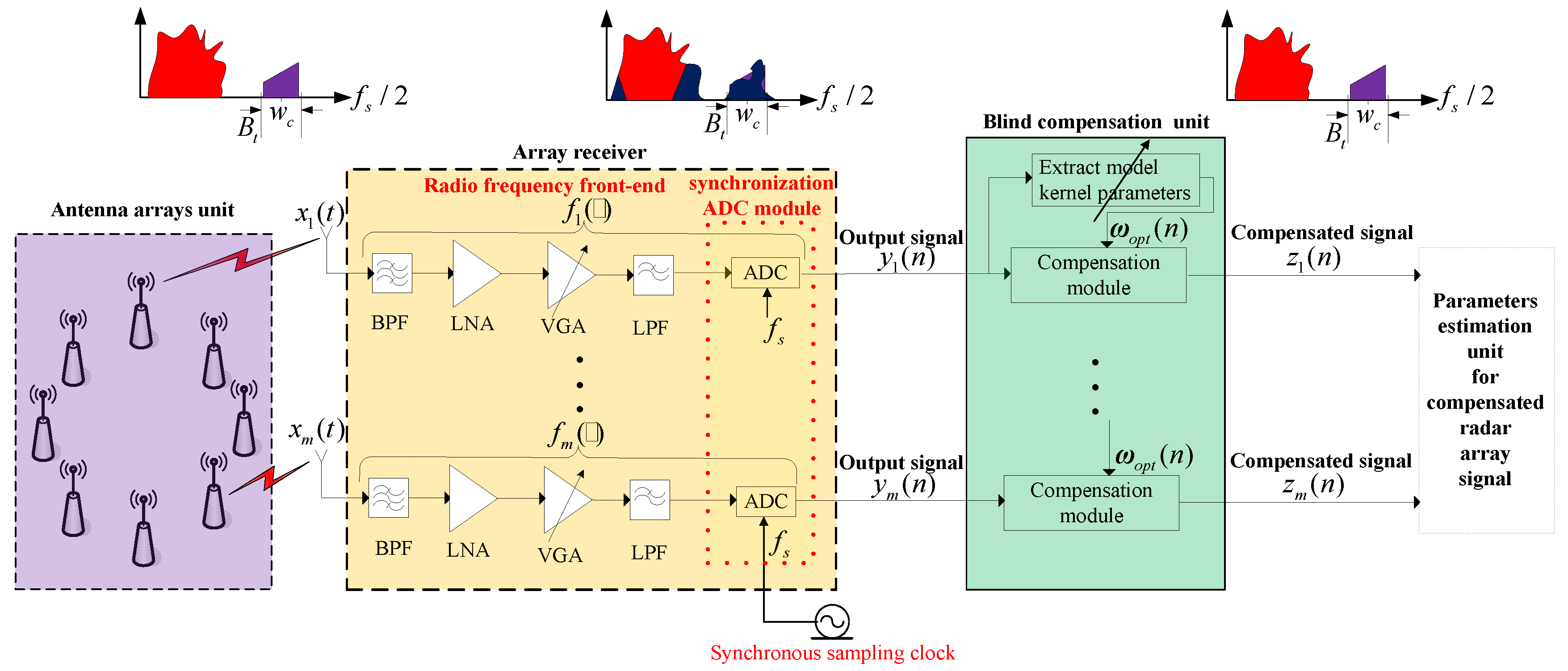
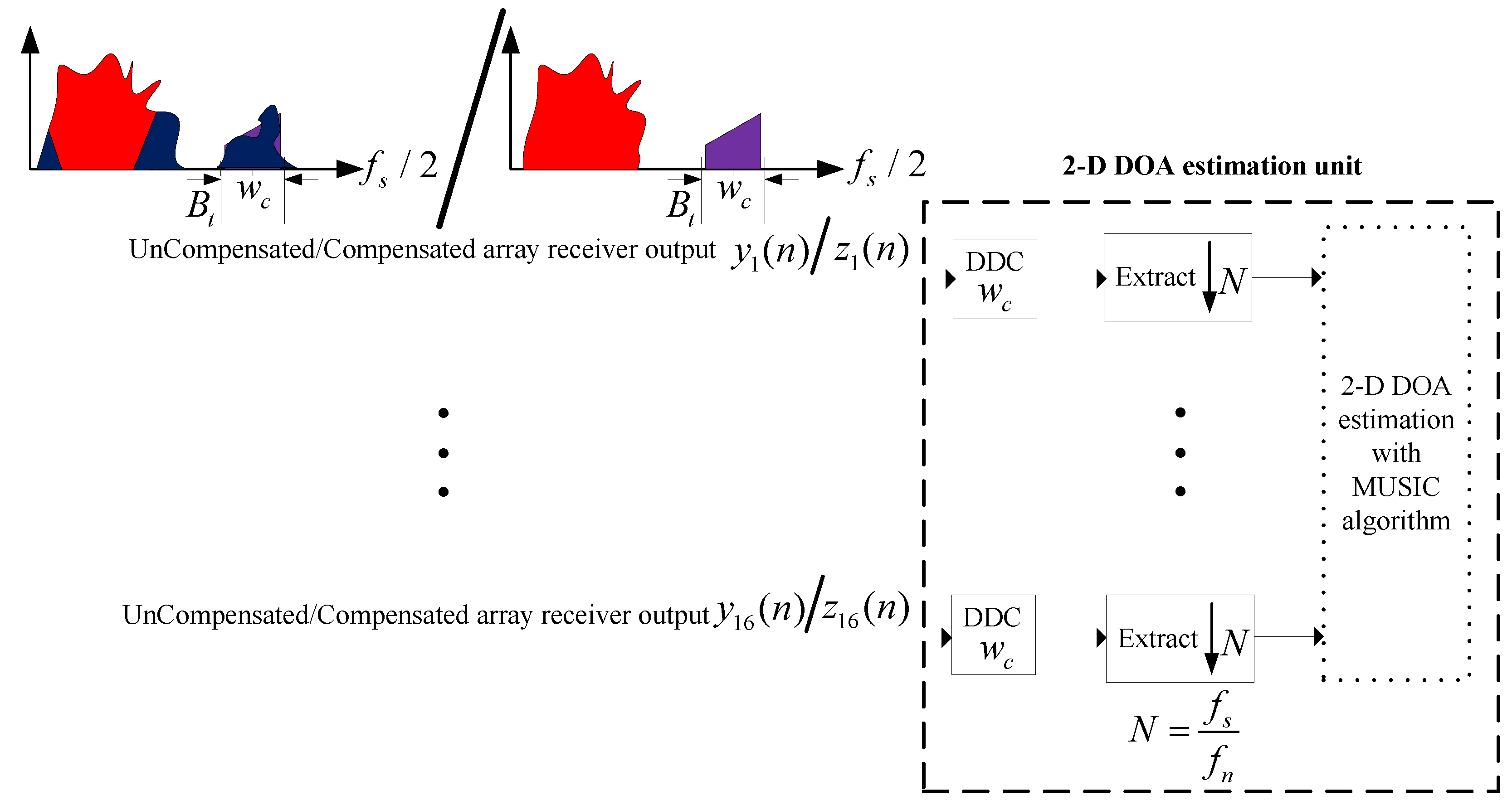
2.1. ASP Architecture Based on Nonlinear Blind Compensation
2.2. Theoretical Analysis of the Proposed Method
3. Proposed Mitigation Architecture for Array Receiver
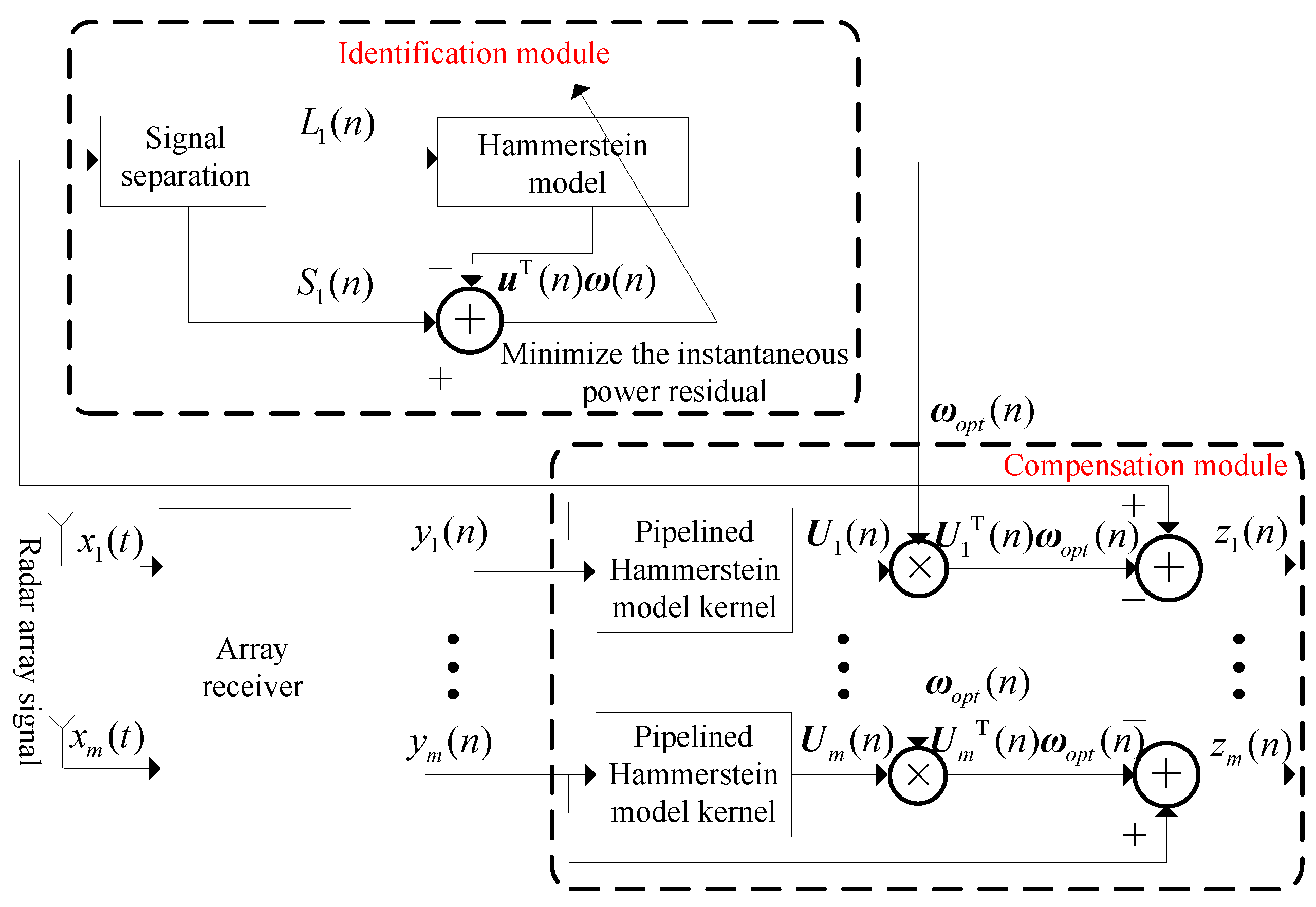
3.1. Nonlinear Blind Mitigation Structure
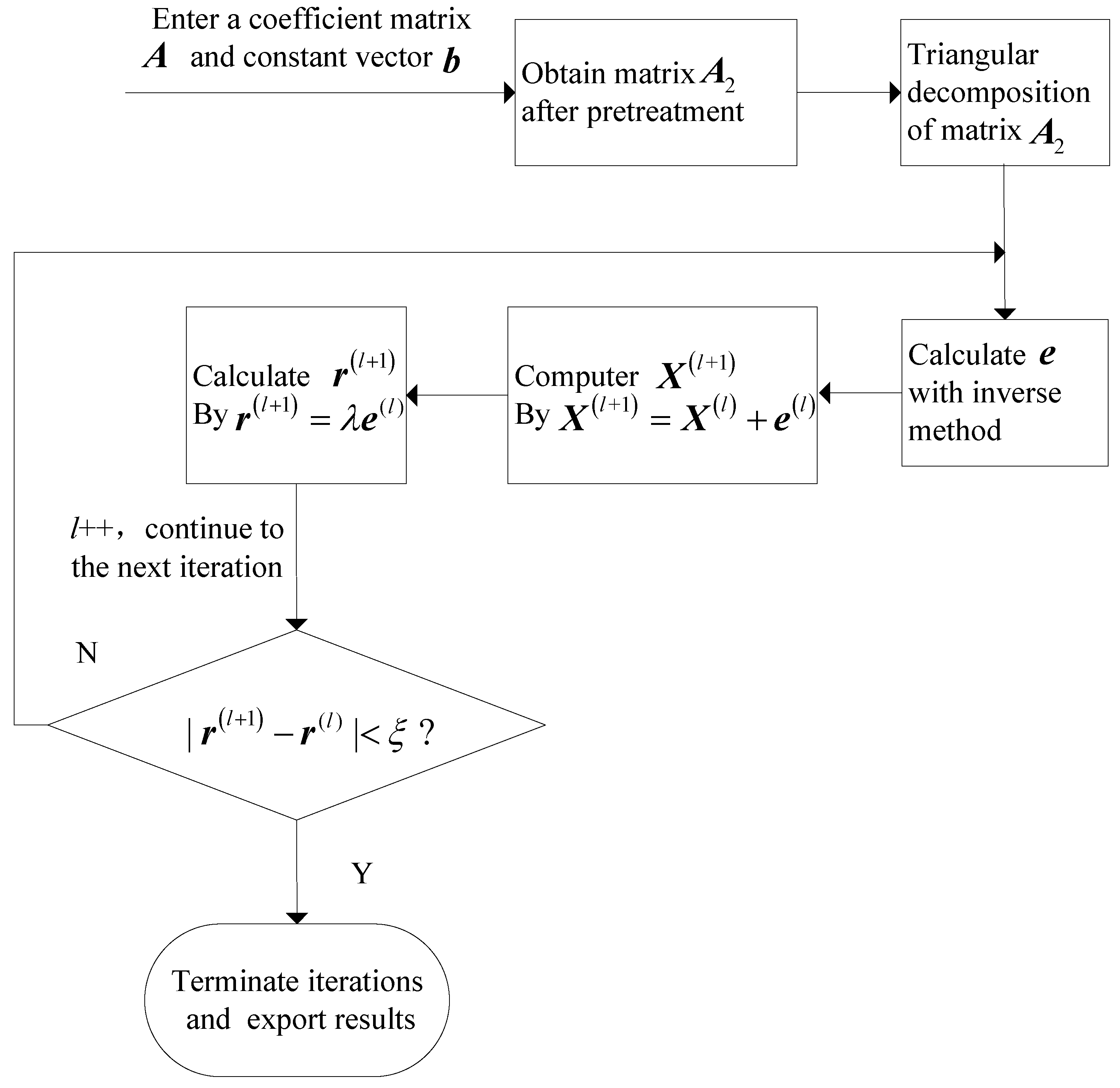
3.2. SRA-TFC Method
- The time domain distorted signal and pure noise from the first channel RF front-end needs to be extracted.
- and are both translated into the corresponding signal and noise in frequency-domain via the Discrete Fourier transform (DFT) technique and denoted as and , respectively.
- Each point of is compared with the setting power spectrum threshold. Next, frequency-domain large signals are obtained with the method that the points in , whose values are below the threshold, are replaced by the corresponding points in , whereas the others remain. Conversely, frequency-domain small signals, is gained by the replaced points in whose values are above the threshold.
- By the IDFT technique, the authors turn and to time-domain large signals, and time-domain small signals, , separately.
3.3. Comparisons between SRA-TFC Method and Traditional SVD-Based Method
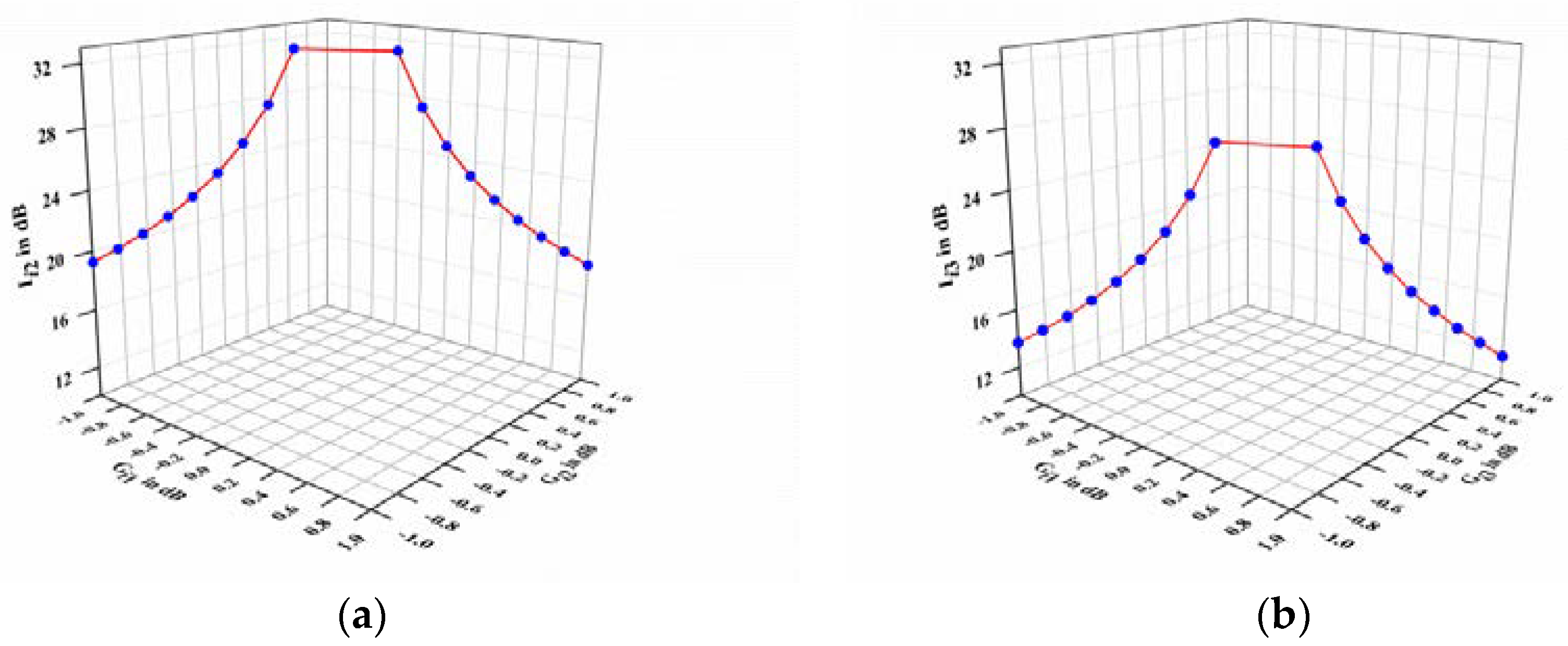
3.3.1. Comparison of Compensation Results
3.3.2. Comparison between Computational Complexities
- points and points are first extracted and then separately converted into and via DFT. The points DFT requires both times of multiplication and times of addition. Therefore, the required calculations to acquire and are iterations of multiplication and addition.
- It requires times multiplication and times addition to calculate the power spectral density of . Moreover, with the application of above threshold detection method, it needs iterations of addition to achieve and .
- The authors separately convert and into and by IDFT. This step requires iterations of multiplication and addition.
4. Experimental Results and Analysis
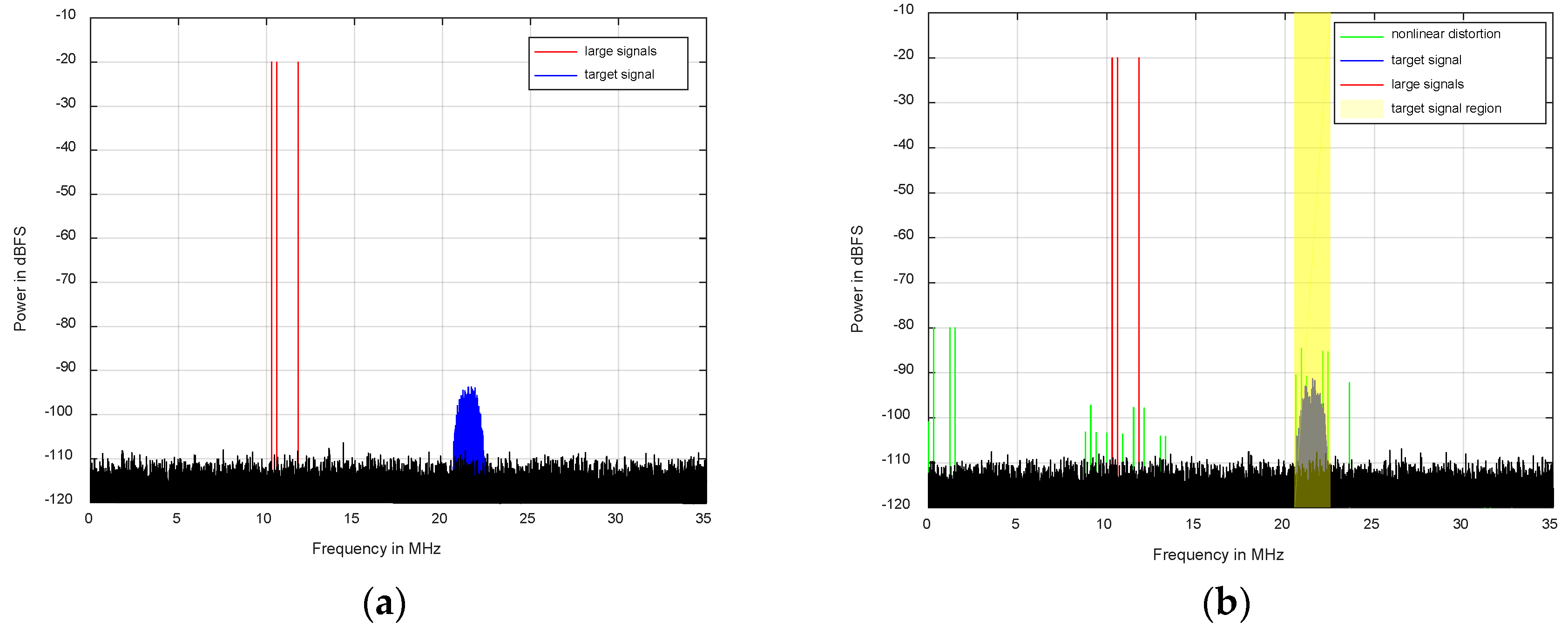
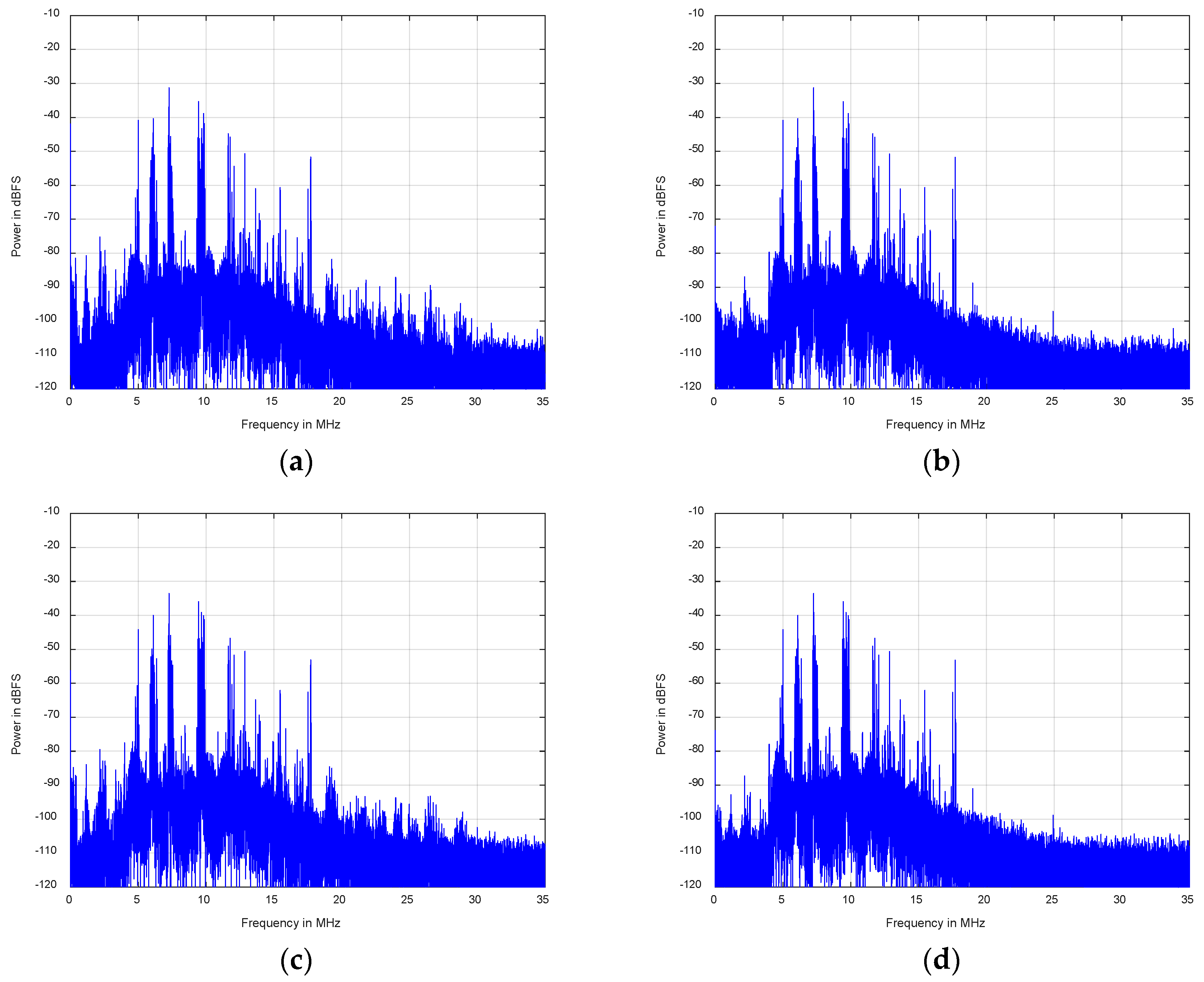
4.1. Nonlinearity Mitigation Performance for ASP System
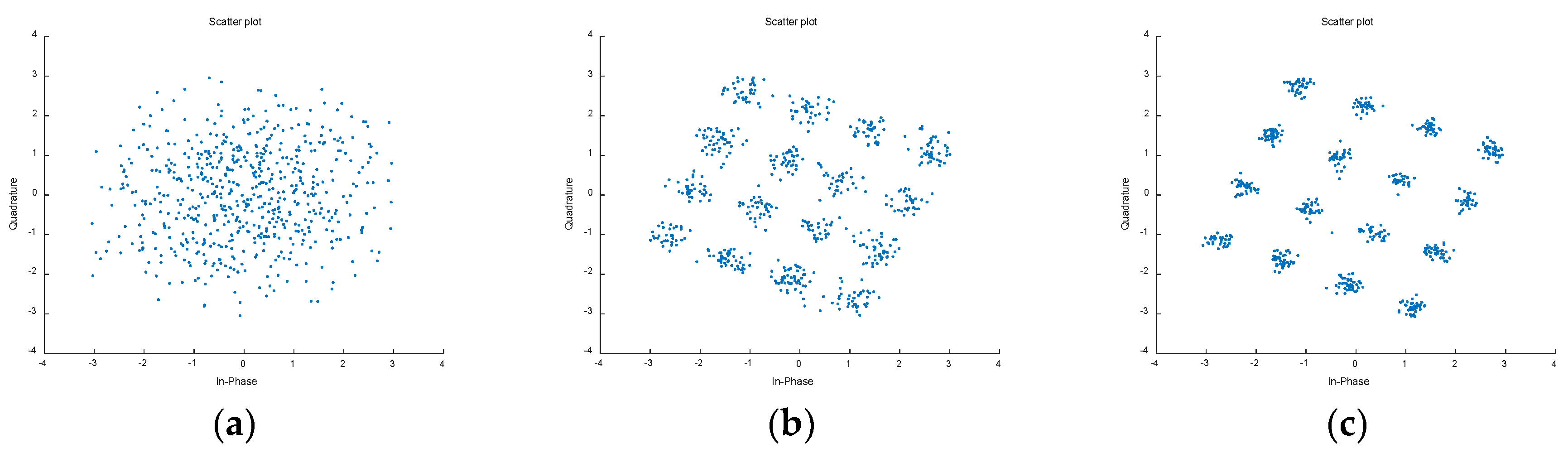
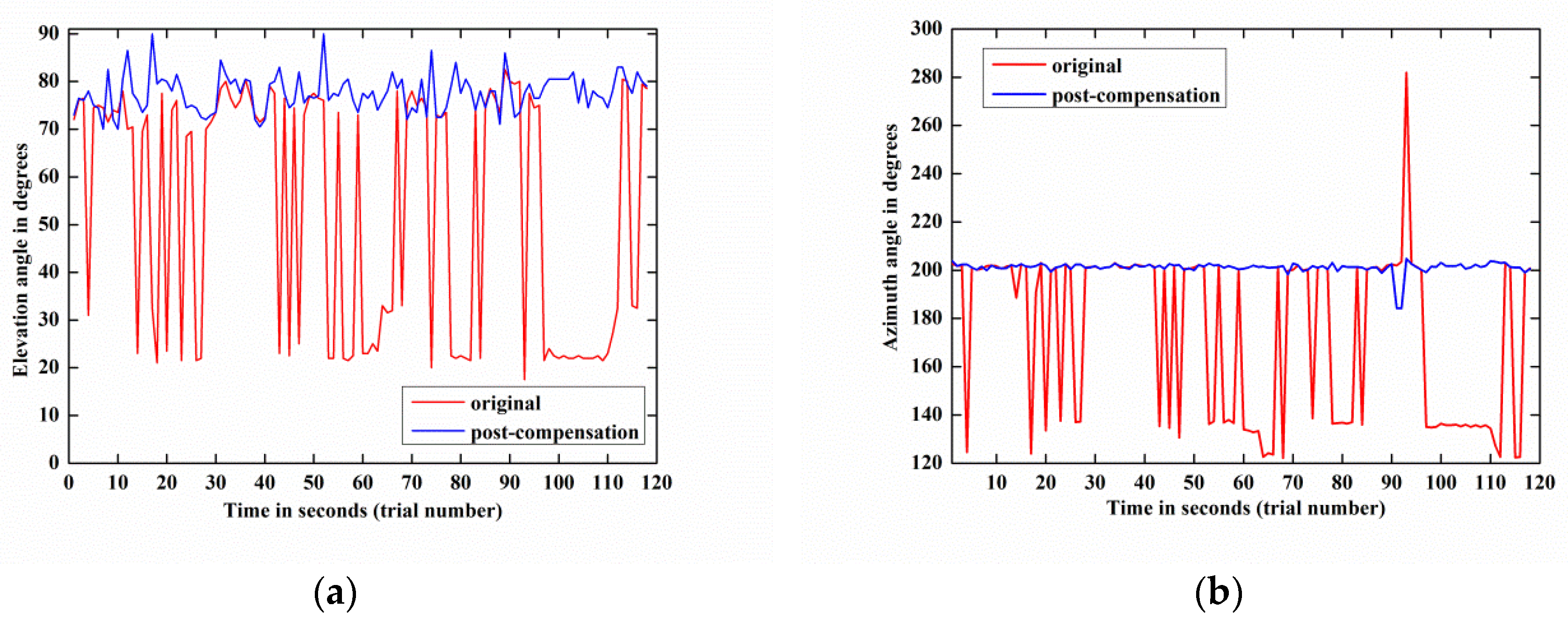
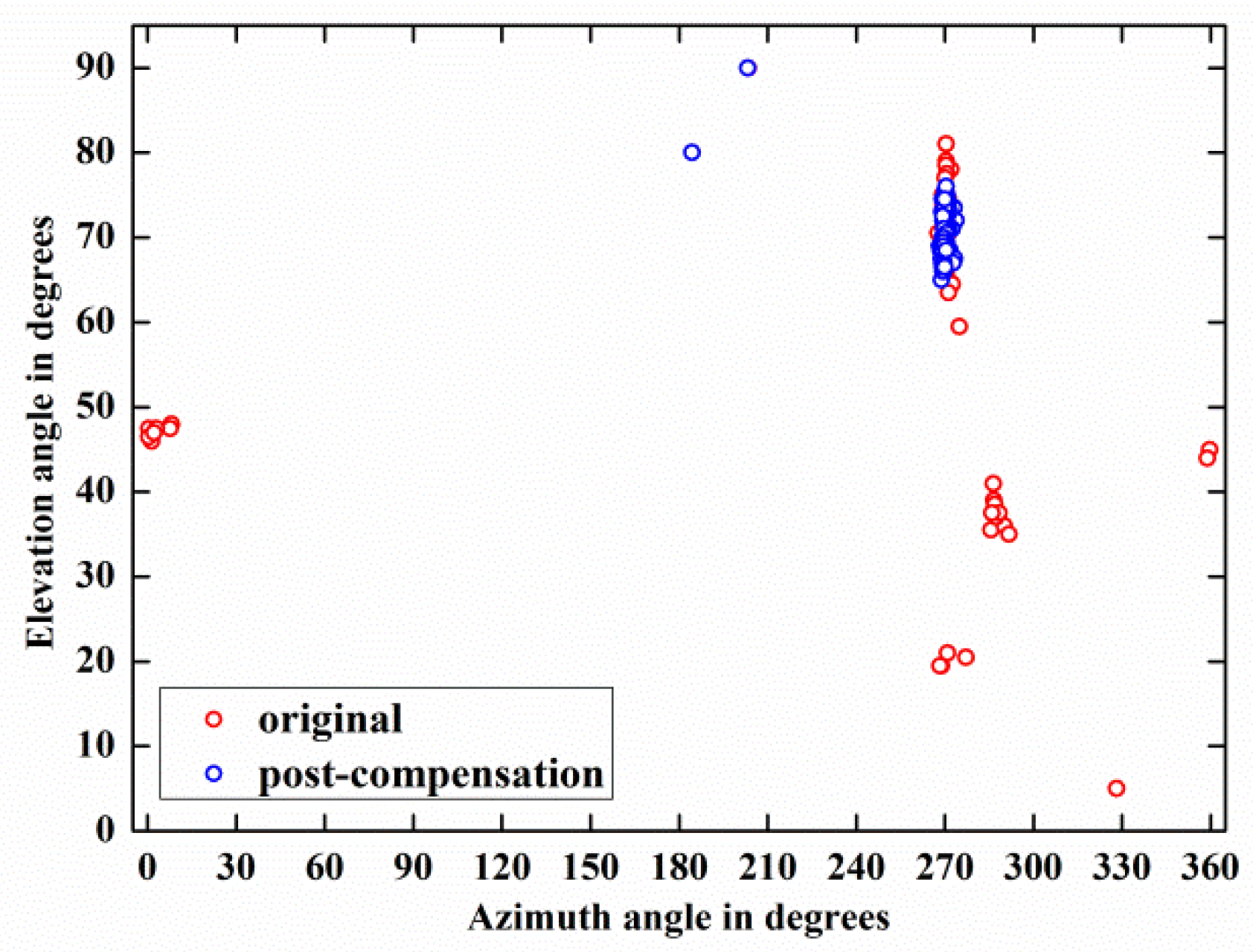
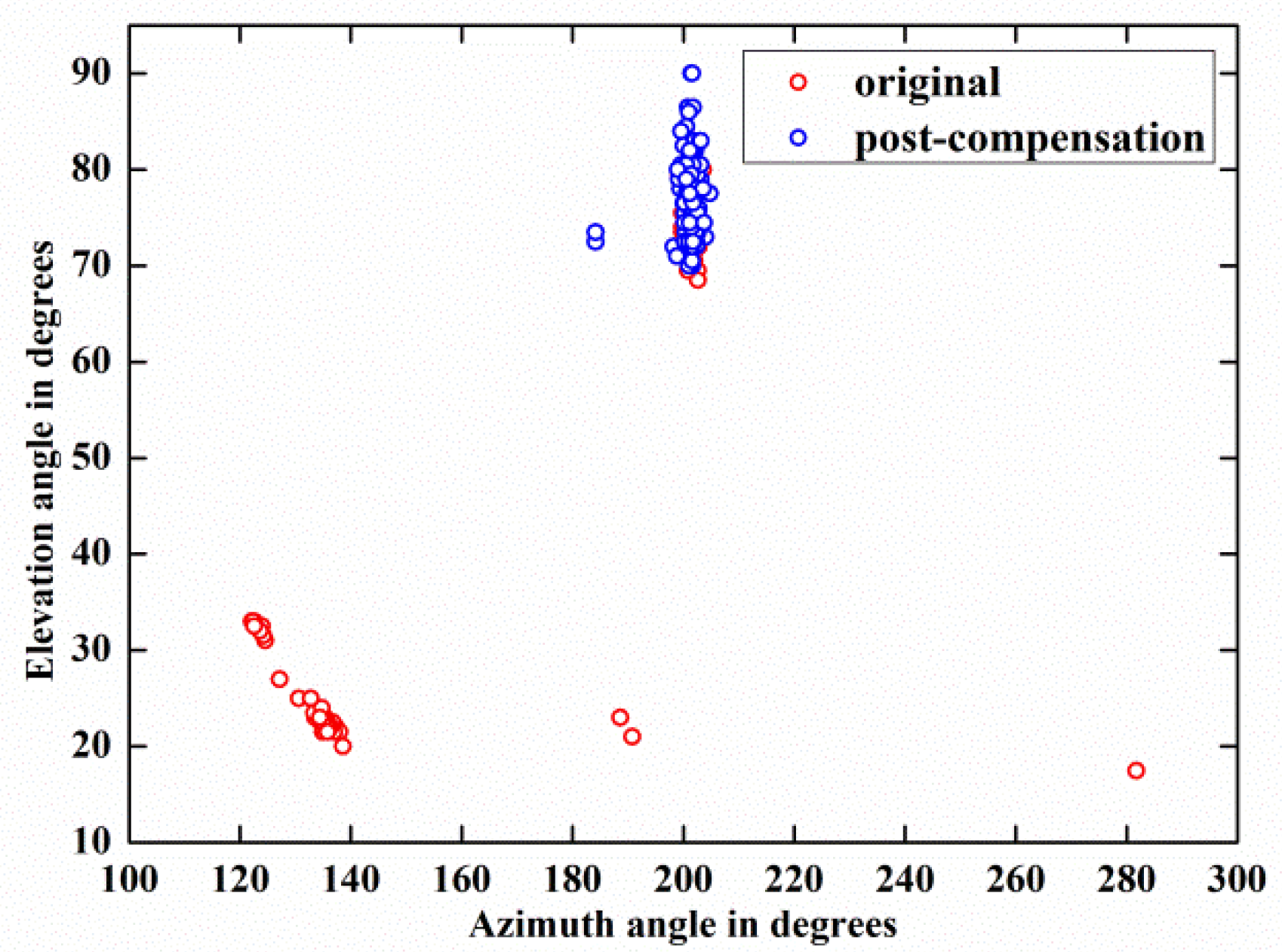
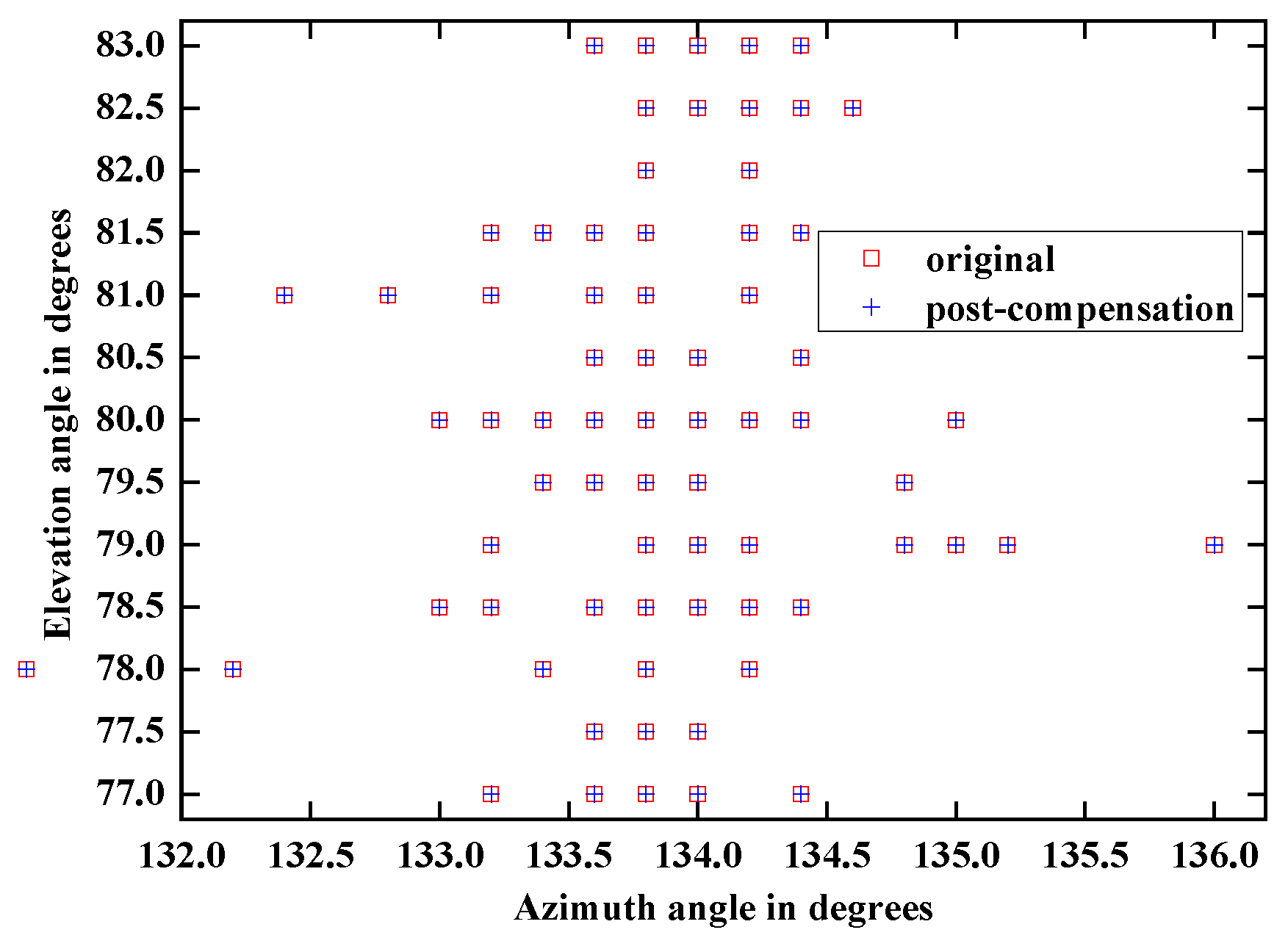
4.2. 2-D DOA Performances of Target Signals
4.2.1. 2-D DOA Performance in the Case of Weak Target Signals
4.2.2. 2-D DOA Performance in the Case of Strong Target Signal
5. Conclusions
- During the blind compensation process, the parameters of the identification module and the compensation module are totally independent of each other, which can improve the efficiency of array signal processing and increase its dependability.
- The suggested algorithm accomplished in pure time-domain saves a great deal of the system hardware scale. In addition, the proposed algorithm is only necessary to set power threshold rather than multi-stopband/multi-passband digital filters with extremely high performance of constant change, which is apparently more flexible and convenient to handle the situation of multiple signals with different power levels or wide ranges of bandwidth.
- The blind compensation strategy for multi-channel RF front-ends designed is that the model parameters of any one of the channels are extracted to mitigate the nonlinear distortion components of all channels synchronously. It has the advantages of reducing a mountain of computational loads and avoiding the inconsistency of the array compensation performance caused by the iterative computation error, especially the phase disturbance of the array signal after compensation.
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Krim, H.; Viberg, M. Two decades of array signal processing research: The parametric approach. IEEE Signal Process. Mag. 1996, 13, 67–94. [Google Scholar] [CrossRef]
- Zhou, C.; Gu, Y.; He, S.; Shi, Z. A robust and efficient algorithm for coprime array adaptive beamforming. IEEE Trans. Veh. Technol. 2017. [Google Scholar] [CrossRef]
- Bae, S.; Kim, S.; Kim, J. Efficient frequency-hopping synchronization for satellite communications using dehop-rehop transponders. IEEE Trans. Aerosp. Electr. Syst. 2016, 52, 261–274. [Google Scholar] [CrossRef]
- Ko, Y.H.; Kim, Y.J.; Yoo, H.I.; Yang, W.Y.; Cho, Y.S. 2-D DOA Estimation with Cell Searching for a Mobile Relay Station with Uniform Circular Array. IEEE Trans. Commun. 2010, 58, 2805–2809. [Google Scholar] [CrossRef]
- Wang, X.; Wang, W.; Li, X.; Liu, Q.; Liu, J. Sparsity-aware DOA estimation scheme for noncircular source in MIMO radar. Sensors 2016, 16, 539. [Google Scholar] [CrossRef] [PubMed]
- Zhang, X.; Zhou, M.; Li, J. A PARALIND Decomposition-Based Coherent Two-Dimensional Direction of Arrival Estimation Algorithm for Acoustic Vector-Sensor Arrays. Sensors 2013, 13, 5302–5316. [Google Scholar] [CrossRef] [PubMed]
- Huang, Y.Y. Multi-Parameter Estimation Technology of Wide-band Array signal Based on High-Order Cumulant. Ph.D. Thesis, University of Electronic Science and Technology of China, Chengdu, China, 2001. [Google Scholar]
- Blandin, C.; Ozerov, A.; Vincent, E. Multi-source TDOA estimation in reverberant audio using angular spectra and clustering. Signal Process. 2012, 92, 1950–1960. [Google Scholar] [CrossRef]
- Wang, X.; Mao, X.; Wang, Y.; Zhang, N.; Li, B. A novel 2-D coherent DOA estimation method based on dimension reduction sparse reconstruction for orthogonal arrays. Sensors 2016, 16, 1496. [Google Scholar] [CrossRef] [PubMed]
- Shi, Z.; Zhou, C.; Gu, Y.; Goodman, N.A.; Qu, F. Source estimation using coprime array: A sparsereconstruction perspective. IEEE Sens. J. 2017, 17, 755–765. [Google Scholar] [CrossRef]
- Forster, P.; Ginolhac, G.; Boizard, M. Derivation of the theoretical performance of a Tensor MUSIC Algorithm. Signal Process. 2016, 129, 97–105. [Google Scholar] [CrossRef]
- Zeng, W.J.; Li, X.L.; Zhang, X.D. Direction-of-arrival estimation based on the joint diagonalization structure of multiple fourth-order cumulant matrices. IEEE Signal Process. Lett. 2009, 16, 164–167. [Google Scholar] [CrossRef]
- Liu, J.; Zhou, W.D.; Wang, X.P. Fourth-order cumulants-based sparse representation approach for DOA estimation in MIMO radar with unknown mutual coupling. Signal Process. 20016, 128, 123–130. [Google Scholar] [CrossRef]
- Dogançay, K. Blind compensation of nonlinear distortion for bandlimited signals. IEEE Trans. Circuits Syst. I Regul. Pap. 2005, 52, 1872–1882. [Google Scholar] [CrossRef]
- Valkama, M.; Ghadam, A.S.H.; Anttila, L.; Renfors, M. Advanced digital signal processing techniques for compensation of nonlinear distortion in wideband multicarrier radio receivers. IEEE Trans. Microw. Theory Tech. 2006, 54, 2356–2366. [Google Scholar] [CrossRef]
- Markus, A.; Jaakko, M.; Mikko, V.; Simran, S.; Michael, E.; Wolfgang, S. Digital full-band linearization of wideband direct-conversion receiver for radar and communications applications. In Proceedings of the 2015 49th Asilomar Conference on Signals, Systems and Computers, Pacific Grove, CA, USA, 8–11 November 2015; pp. 1361–1368. [Google Scholar]
- Grimm, M.; Allen, M.; Marttila, J.; Valkama, M.; Thoma, R. Joint mitigation of nonlinear RF and baseband distortions in wideband direct-conversion receivers. IEEE Trans. Microw. Theory Tech. 2014, 62, 166–182. [Google Scholar] [CrossRef]
- Liu, Y.J. Adaptive Blind Postdistortion and Equalization of System Impairments for a Single-Channel Concurrent Dual-Band Receiver. IEEE Trans. Microw. Theory Tech. 2017, 65, 302–314. [Google Scholar] [CrossRef]
- Mark, W. PIM Compensation in a Receiver. U.S. Patent 2014/0036736 A1, 6 February 2014. [Google Scholar]
- Peng, L.; Ma, H. Design and Implementation of Software-Defined Radio Receiver Based on Blind Nonlinear System Identification and Compensation. IEEE Trans. Circuits Syst. Video Technol. 2011, 58, 2776–2789. [Google Scholar] [CrossRef]
- Grimm, M.; Sharma, R.K.; Hein, M.; Thomä, R. DSP-based mitigation of RF front-end non-linearity in cognitive wideband receivers. Freq. J. RF Eng. Telecommun. 2012, 66, 303–310. [Google Scholar] [CrossRef]
- Grimm, M.; Sharma, R.K.; Hein, M.; Thomä, R.S.; Zemmari, R. Improved BER performance in GSM by mitigating non-linear distortions in the receiver. In Proceedings of the 43th European Microwave Conference, Nuremberg, Germany, 11 October 2013; pp. 565–568. [Google Scholar]
- Eghbali, A.; Johansson, H.; Gustafsson, O.; Savory, S.J. Optimal Least-Squares FIR Digital Filters for Compensation of Chromatic Dispersion in Digital Coherent Optical Receivers. J. Lightwave Technol. 2014, 32, 1449–1456. [Google Scholar] [CrossRef]
- Zhang, C.M.; Yao, S. On the research of weight iterative improvement method for morbid state linear systems. J. Anqing Teach. Coll. (Nat. Sci.) 2004, 10, 78–79. [Google Scholar]
- Chabriel, G.; Kleinsteuber, M.; Moreau, E.; Shen, H.; Tichavsky, P.; Yeredor, A. Joint Matrices Decompositions and Blind Source Separation: A survey of methods, identification and applications. IEEE Signal Process. Mag. 2014, 31, 34–43. [Google Scholar] [CrossRef]
- Bertin, N.; Badeau, R.; Gael Richard, G. Blind Signal Decompositions for Automatic Transcription of Polyphonic Music: NMF and K-SVD on the Benchmark. In Proceedings of the 2007 IEEE International Conference on Acoustics, Speech and Signal Processing, Honolulu, HI, USA, 15–20 April 2007; pp. 65–68. [Google Scholar]
- Pozo, S.M.D.; Standaert, F.X. Blind Source Separation from Single Measurements Using Singular Spectrum Analysis. In Proceedings of the International Workshop on Cryptographic Hardware and Embedded Systems 2015, Saint-Malo, France, 13–16 September 2015; pp. 42–59. [Google Scholar]
- Wason, H.; Kumar, R.; Aravkin, A.J.; Herrmann, F.J. Source separation via SVD-free rank minimization in the hierarchical semi-separable representation. In Proceedings of the 2014 SEG Annual Meeting, Denver, CO, USA, 26–31 October 2014. [Google Scholar]
- Hu, L.; Ma, H.; Zhang, H.; Zhao, W. Mitigating RF Front-end Nonlinearity of Sensor Nodes to Enhance Spectrum Sensing. Sensors 2016, 16, 1999. [Google Scholar] [CrossRef] [PubMed]
- Hu, X. Research on Blind Identification of Nonlinear Distortion of Digital Receiver Based on Second and Higher-Order Statistic. Ph.D. Thesis, Huazhong University of Science & Technology, Wuhan, China, 2011. [Google Scholar]
- Mather, R.J. Chebyshev Series Expansion of Inverse Polynomial. J. Comput. Appl. Math. 2006, 196, 596–607. [Google Scholar] [CrossRef]
- Tsimbinos, J.; Lever, K.V. Nonlinear System Compensation Based on Orthogonal Polynomial Inverse. IEEE Trans. Circuits Syst. Fundam. Theory Appl. 2001, 48, 406–417. [Google Scholar] [CrossRef]
- Laurent, V.; Rik, P.; Johan, S. Blind maximum likelihood identification of Hammerstein systems. Automatica 2008, 44, 3139–3146. [Google Scholar]
- Wu, Y.T.; So, H.C. Simple and accurate two-dimensional angle estimation for a single source with uniform circular array. IEEE Antennas Wirel. Propag. Lett. 2008, 7, 78–80. [Google Scholar]
- Wu, Y.T.; Wang, H.; Zhang, Y.B.; Wang, Y. Multiple near-field source localisation with uniform circular array. Electron. Lett. 2013, 49, 1509–1510. [Google Scholar] [CrossRef]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Signal Frequency (MHz) | Computational Complexity | |
|---|---|---|
| Maximum |PEi| (dB) | Minimum |PEi| (dB) | |
| 5.02 | PE14 = 1.166 | PE5 = 0.143 |
| 13.92 | PE10 = 0.583 | PE3 = 0.008 |
| 16.97 | PE5 = 0.582 | PE6 = 0.022 |
| 19 | PE10 = 0.697 | PE3 = 0.029 |
| 21.6 | PE10 = 0.318 | PE2 = 0.019 |
| 28.02 | PE5 = 0.976 | PE10 = 0.04 |
| Signal Separation Method | Computational Complexity | |||
|---|---|---|---|---|
| Addition | Multiplication | Division | Square-Root | |
| traditional SVD-based method | ||||
| SRA-TFC method | without | without | ||
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Huang, J.; Ma, H.; Jin, J.; Zhang, H. Nonlinear Blind Compensation for Array Signal Processing Application. Sensors 2018, 18, 1286. https://doi.org/10.3390/s18041286
Huang J, Ma H, Jin J, Zhang H. Nonlinear Blind Compensation for Array Signal Processing Application. Sensors. 2018; 18(4):1286. https://doi.org/10.3390/s18041286
Chicago/Turabian StyleHuang, Jialu, Hong Ma, Jiang Jin, and Hua Zhang. 2018. "Nonlinear Blind Compensation for Array Signal Processing Application" Sensors 18, no. 4: 1286. https://doi.org/10.3390/s18041286
APA StyleHuang, J., Ma, H., Jin, J., & Zhang, H. (2018). Nonlinear Blind Compensation for Array Signal Processing Application. Sensors, 18(4), 1286. https://doi.org/10.3390/s18041286