Wind Gust Measurement Techniques—From Traditional Anemometry to New Possibilities


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
1.1. History of Wind Gust Measurement Techniques
1.2. Present Methods and Remaining Challenges
2. Wind Gust Definition
3. Surface-Based In-Situ Measurement Techniques
3.1. Rotating Anemometers
3.2. Sonic Anemometers
3.3. Pressure Anemometers
3.4. Anemometers Based on the Cooling Rate
4. Remote Sensing Techniques
4.1. Doppler Lidar
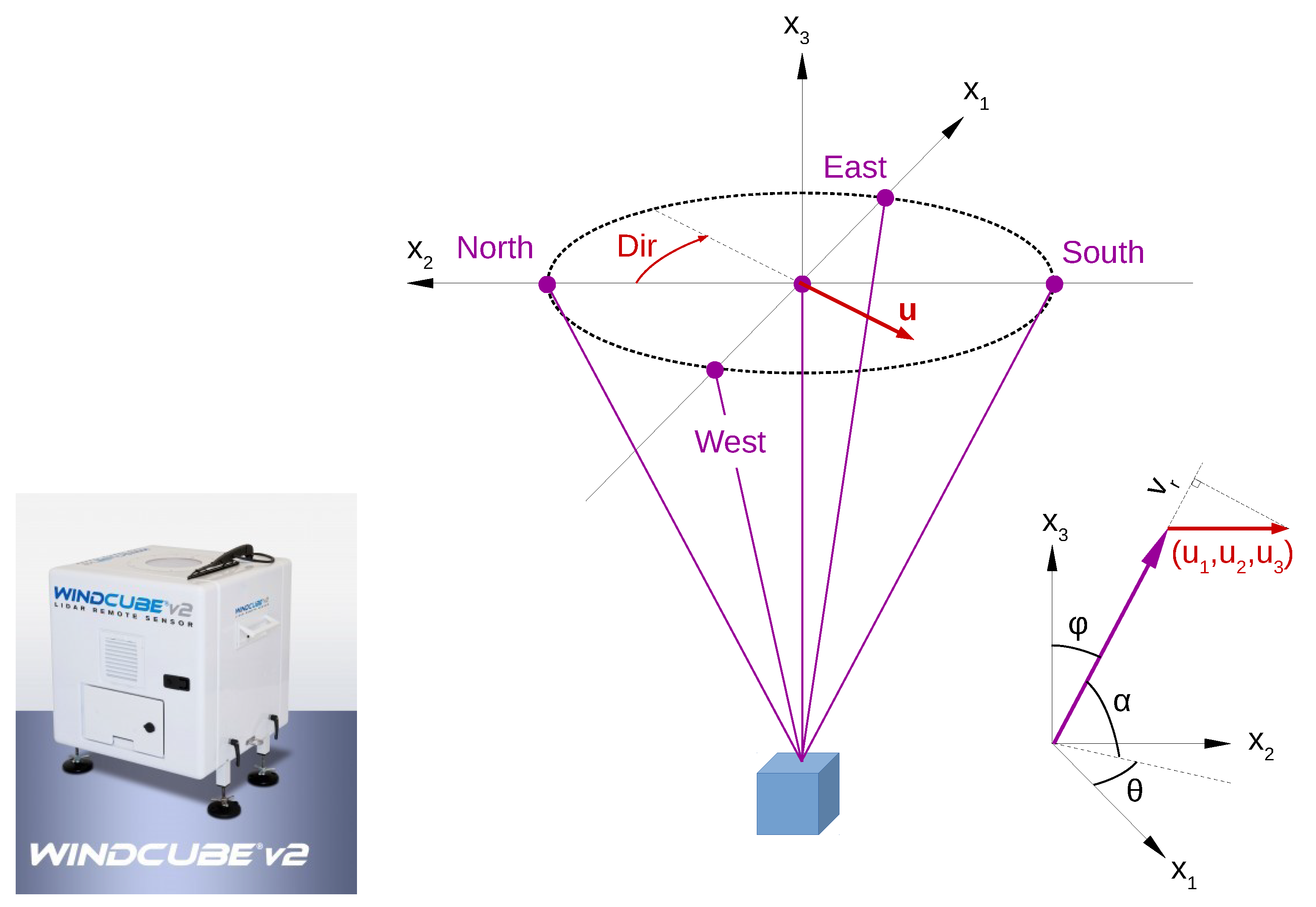
- Doppler Beam Swinging (DBS) scan consists of 3–5 beams, of which one can be vertical (three- and five-beam systems) and others inclined with a fixed elevation angle () of about 60–70, and an azimuth angle () of 90 (or 270) between the beams. An illustration of a DBS scanning pattern with five beams is shown in Figure 4.
- Velocity-Azimuth Display (VAD) scan has many inclined beams with a fixed azimuth angle between neighboring beams and a fixed elevation angle that can be chosen by application. With very low level (small elevation angle) scans, it is possible to observe the horizontal variability of the wind, and with a higher elevation angle, more accuracy can be achieved for the measurement of mean wind speed profiles [80].
- Plan Position Indicator (PPI) scan varies the azimuth angle with a fixed elevation angle and therefore takes measurements on a conical surface.
4.2. Doppler Radar
5. Airborne Measurements
5.1. Research Aircraft
5.2. Unmanned Aircraft Systems
5.3. Other Airborne Techniques
6. Reporting Practices
7. The Effect of Environmental Conditions on Wind Gust Measurements
8. Conclusions and Outlook
Author Contributions
Acknowledgments
Conflicts of Interest
References
- Wehrli, A.; Herkendell, J.; Jol, A. Mapping the Impacts of Natural Hazards and Technological Accidents in Europe; Technical Report 13/2010; European Environment Agency (EEA): Copenhagen, Denmark, 2010. [Google Scholar]
- Prahl, B.; Rybski, D.; Burghoff, O.; Kropp, J. Comparison of storm damage functions and their performance. Nat. Hazards Earth Syst. Sci. 2015, 15, 769–788. [Google Scholar] [CrossRef]
- Chan, P. An event of tail strike of an aircraft due to terrain-induced wind shear at the Hong Kong International Airport. Meteorol. Appl. 2012, 19, 325–333. [Google Scholar] [CrossRef]
- Shi, X.K.; Liu, J.W.; Li, Y.D.; Huang, B.; Tan, Y.Q. A diagnostic method for aircraft turbulence based on high-resolution numerical weather prediction products. Nat. Hazards 2015, 77, 867–881. [Google Scholar] [CrossRef]
- Solari, G.; Repetto, M.P.; Burlando, M.; De Gaetano, P.; Pizzo, M.; Tizzi, M.; Parodi, M. The wind forecast for safety management of port areas. J. Wind Eng. Ind. Aerodyn. 2012, 104, 266–277. [Google Scholar] [CrossRef]
- Vajda, A.; Tuomenvirta, H.; Juga, I.; Nurmi, P.; Jokinen, P.; Rauhala, J. Severe weather affecting European transport systems: The identification, classification and frequencies of events. Nat. Hazards 2014, 72, 169–188. [Google Scholar] [CrossRef]
- Burton, T.; Sharpe, D.; Jenkins, N.; Bossanyi, E. Wind Energy Handbook, 2nd ed.; John Wiley & Sons: Chichester, UK, 2011; p. 742. [Google Scholar]
- Wang, X.; Guo, P.; Huang, X. A review of wind power forecasting models. Energy Procedia 2011, 12, 770–778. [Google Scholar] [CrossRef]
- Kanev, S.; van Engelen, T. Wind turbine extreme gust control. Wind Energy 2010, 13, 18–35. [Google Scholar] [CrossRef]
- Towers, P.; Jones, B.L. Real-time wind field reconstruction from LiDAR measurements using a dynamic wind model and state estimation. Wind Energy 2016, 19, 133–150. [Google Scholar] [CrossRef]
- Bos, R.; Giyanani, A.; Bierbooms, W. Assessing the severity of wind gusts with lidar. Remote Sens. 2016, 8, 758. [Google Scholar] [CrossRef]
- Laughton, J.K. Historical sketch of anemometry and anemometers. Q. J. R. Meteorol. Soc. 1882, 8, 161–189. [Google Scholar] [CrossRef]
- Jacobson, M.Z. Fundamentals of Atmospheric Modeling; Cambridge university Press: Cambridge, UK, 1999. [Google Scholar]
- Sherlock, R.; Stout, M. Wind structure in winter storms. J. Aeronaut. Sci. 1937, 5, 53–61. [Google Scholar] [CrossRef]
- Deacon, E. The over-estimation error of cup anemometers in fluctuating winds. J. Sci. Instrum. 1951, 28, 231. [Google Scholar] [CrossRef]
- Sheppard, P. Anemometry: A critical and historical survey. Proc. Phys. Soc. 1941, 53, 361. [Google Scholar] [CrossRef]
- Robinson, T. On a New Anemometer. Proc. R. Irish Acad. 1847, 4, 566–572. [Google Scholar]
- Wyngaard, J. Cup, propeller, vane, and sonic anemometers in turbulence research. Ann. Rev. Fluid Mech. 1981, 13, 399–423. [Google Scholar] [CrossRef]
- Kristensen, L. The perennial cup anemometer. Wind Energy 1999, 2, 59–75. [Google Scholar] [CrossRef]
- Pindado, S.; Cubas, J.; Sorribes-Palmer, F. The cup anemometer, a fundamental meteorological instrument for the wind energy industry. Research at the IDR/UPM Institute. Sensors 2014, 14, 21418–21452. [Google Scholar] [CrossRef] [PubMed]
- Pindado, S.; Cubas, J.; Sorribes-Palmer, F. On the harmonic analysis of cup anemometer rotation speed: A principle to monitor performance and maintenance status of rotating meteorological sensors. Measurement 2015, 73, 401–418. [Google Scholar] [CrossRef]
- IEC-61400-12-1. Wind Turbines. Part 12-1: Power Performance Measurements of Electricity Producing Wind Turbines; International standard; International Electrotechnical Commission: Geneva, Switzerland, 2005. [Google Scholar]
- MEASNET. Anemometer Calibration Procedure; Technical report; Measuring Network of Wind Energy Institutes: Madrid, Spain, 2005. [Google Scholar]
- Barrett, E.W.; Suomi, V.E. Preliminary report on temperature measurement by sonic means. J. Meteorol. 1949, 6, 273–276. [Google Scholar] [CrossRef]
- Schotland, R. The measurement of wind velocity by sonic means. J. Meteorol. 1955, 12, 386–390. [Google Scholar] [CrossRef]
- Kaimal, J.; Businger, J. A continuous wave sonic anemometer-thermometer. J. Appl. Meteorol. 1963, 2, 156–164. [Google Scholar] [CrossRef]
- ISO 16622:2002. Meteorology—Sonic Anemometers/Thermometers—Acceptance Test Methods for Mean Wind Measurements; International Organization for Standardization: Geneva, Switzerland, 2000. [Google Scholar]
- Garbett, L. Admiral Sir Francis Beaufort and the Beaufort Scales of wind and weather. Q. J. R. Meteorol. Soc. 1926, 52, 161–172. [Google Scholar] [CrossRef]
- World Meteorological Organization. Measurement of surface wind. In Guide to Meteorological Instruments and Methods of Observation (2017 Update); World Meteorological Organisation: Geneva, Switzerland, 2014. [Google Scholar]
- Peterson, E.; Hasse, L. Did the Beaufort scale or the wind climate change? J. Phys. Oceanogr. 1987, 17, 1071–1074. [Google Scholar] [CrossRef]
- Sloan, C.; Clark, M. A comparison of three Met Office wind observing systems. Atmos. Sci. Lett. 2012, 13, 283–288. [Google Scholar] [CrossRef]
- Stearns, C.R.; Wendler, G. Research results from Antarctic automatic weather stations. Rev. Geophys. 1988, 26, 45–61. [Google Scholar] [CrossRef]
- Serafin, R.J.; Dabberdt, W.F.; Cooper, W.A. Advances in meteorological instrumentation. Rev. Geophys. 1987, 25, 393–402. [Google Scholar] [CrossRef]
- Wieringa, J. Roughness-dependent geographical interpolation of surface wind speed averages. Q. J. R. Meteorol. Soc. 1986, 112, 867–889. [Google Scholar] [CrossRef]
- Wieringa, J. Does representative wind information exist? J. Wind Eng. Ind. Aerodyn. 1996, 65, 1–12. [Google Scholar] [CrossRef]
- Verkaik, J. Evaluation of two gustiness models for exposure correction calculations. J. Appl. Meteorol. 2000, 39, 1613–1626. [Google Scholar] [CrossRef]
- Lothon, M.; Campistron, B.; Chong, M.; Couvreux, F.; Guichard, F.; Rio, C.; Williams, E. Life cycle of a mesoscale circular gust front observed by a C-band Doppler radar in West Africa. Mon. Weather Rev. 2011, 139, 1370–1388. [Google Scholar] [CrossRef]
- Suomi, I.; Lüpkes, C.; Hartmann, J.; Vihma, T.; Gryning, S.E.; Fortelius, C. Gust factor based on research aircraft measurements: A new methodology applied to the Arctic marine boundary layer. Q. J. R. Meteorol. Soc. 2016, 142, 2985–3000. [Google Scholar] [CrossRef]
- Suomi, I.; Gryning, S.E.; O’Connor, E.J.; Vihma, T. Methodology for obtaining wind gusts using Doppler lidar. Q. J. R. Meteorol. Soc. 2017, 143, 2061–2072. [Google Scholar] [CrossRef]
- Suomi, I. Wind Gusts in the Atmospheric Boundary Layer. Ph.D. Thesis, University of Helsinki, Helsinki, Finland, 2017. [Google Scholar]
- Lombardo, F.T.; Main, J.A.; Simiu, E. Automated extraction and classification of thunderstorm and non-thunderstorm wind data for extreme-value analysis. J. Wind Eng. Ind. Aerodyn. 2009, 97, 120–131. [Google Scholar] [CrossRef]
- Harris, A.R.; Kahl, J.D. Gust Factors: Meteorologically Stratified Climatology, Data Artifacts, and Utility in Forecasting Peak Gusts. J. Appl. Meteorol. Climatol. 2017, 56, 3151–3166. [Google Scholar] [CrossRef]
- Letson, F.; Pryor, S.; Barthelmie, R.; Hu, W. Observed gust wind speeds in the coterminous United States, and their relationship to local and regional drivers. J. Wind Eng. Ind. Aerodyn. 2018, 173, 199–209. [Google Scholar] [CrossRef]
- Greenway, M. An analytical approach to wind velocity gust factors. J. Wind Eng. Ind. Aerodyn. 1979, 5, 61–91. [Google Scholar] [CrossRef]
- Suomi, I.; Vihma, T.; Gryning, S.E.; Fortelius, C. Wind-gust parametrizations at heights relevant for wind energy: A study based on mast observations. Q. J. R. Meteorol. Soc. 2013, 139, 1298–1310. [Google Scholar] [CrossRef]
- Suomi, I.; Gryning, S.E.; Floors, R.; Vihma, T.; Fortelius, C. On the vertical structure of wind gusts. Q. J. R. Meteorol. Soc. 2015, 141, 1658–1670. [Google Scholar] [CrossRef]
- Rice, S.O. Mathematical analysis of random noise. Bell Syst. Tech. J. 1944, 23, 282–332. [Google Scholar] [CrossRef]
- Rice, S.O. Mathematical analysis of random noise. Bell Syst. Tech. J. 1945, 24, 46–156. [Google Scholar] [CrossRef]
- Davenport, A.G. Note on the distribution of the largest value of a random function with application to gust loading. Proc. Inst. Civ. Eng. 1964, 28, 187–196. [Google Scholar] [CrossRef]
- Beljaars, A. The influence of sampling and filtering on measured wind gusts. J. Atmos. Ocean. Technol. 1987, 4, 613–626. [Google Scholar] [CrossRef]
- Bechtold, P.; Bidlot, J. Parametrization of convective gusts. ECMWF Newsl. 2009, 119, 15–18. [Google Scholar]
- Kristensen, L.; Casanova, M.; Courtney, M.; Troen, I. In search of a gust definition. Bound. Layer Meteorol. 1991, 55, 91–107. [Google Scholar] [CrossRef]
- Wichers Schreur, B.; Geertsema, G. Theory for a TKE based parameterization of wind gusts. HIRLAM Newsl. 2008, 54, 177–188. [Google Scholar]
- McComb, W.D. The Physics of Fluid Turbulence; Oxford Engineering Science Series; Clarendon Press: Wotton-under-Edge, UK, 1996; Volume 25, p. 572. [Google Scholar]
- Sukoriansky, S.; Galperin, B.; Perov, V. Application of a new spectral theory of stably stratified turbulence to the atmospheric boundary layer over sea ice. Bound. Layer Meteorol. 2005, 117, 231–257. [Google Scholar] [CrossRef]
- Sukoriansky, S.; Galperin, B.; Perov, V. A quasi-normal scale elimination model of turbulence and its application to stably stratified flows. Nonlinear Processes Geophys. 2006, 13, 9–22. [Google Scholar] [CrossRef]
- Kaimal, J.C.; Wyngaard, J.C.; Izumi, Y.; Coté, O.R. Spectral characteristics of surface-layer turbulence. Q. J. R. Meteorol. Soc. 1972, 98, 563–589. [Google Scholar] [CrossRef]
- Sanz-Andr, A.; Pindado, S.; Sorribes-Palmer, F. Mathematical analysis of the effect of rotor geometry on cup anemometer response. Sci. World J. 2014, 2014, 537813. [Google Scholar]
- Sotelino, L.G.; De Coster, N.; Beirinckx, P.; Peeters, P. Intercomparison of cup anemometer and sonic anemometers on site at Uccle/Belgium. In Proceedings of the WMO Technical Conference on Meteorological and Environmental Instruments and Methods of Observation (TECO-2012), Brussels, Belgium, 16–18 October 2012; pp. 16–18. [Google Scholar]
- Lee, X.; Massman, W.; Law, B. Handbook of Micrometeorology: A Guide for Surface Flux Measurement and Analysis; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2006; Volume 29. [Google Scholar]
- Liu, H.; Peters, G.; Foken, T. New equations for sonic temperature variance and buoyancy heat flux with an omnidirectional sonic anemometer. Bound. Layer Meteorol. 2001, 100, 459–468. [Google Scholar] [CrossRef]
- Schotanus, P.; Nieuwstadt, F.; De Bruin, H. Temperature measurement with a sonic anemometer and its application to heat and moisture fluxes. Bound. Layer Meteorol. 1983, 26, 81–93. [Google Scholar] [CrossRef]
- Kaimal, J.; Gaynor, J. Another look at sonic thermometry. Bound. Layer Meteorol. 1991, 56, 401–410. [Google Scholar] [CrossRef]
- Aubinet, M.; Vesala, T.; Papale, D. Eddy Covariance: A Practical Guide to Measurement and Data Analysis; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2012. [Google Scholar]
- Wyngaard, J.C.; Zhang, S.F. Transducer-shadow effects on turbulence spectra measured by sonic anemometers. J. Atmos. Ocean. Technol. 1985, 2, 548–558. [Google Scholar] [CrossRef]
- Mortensen, N. Wind measurements for wind energy applications—A review. In Proceedings of the 16th British Wind Energy Association Conference’, Stirling, UK, 14–17 June 1994; pp. 353–360. [Google Scholar]
- Hojstrup, J. A statistical data screening procedure. Meas. Sci. Technol. 1993, 4, 153. [Google Scholar] [CrossRef]
- Vickers, D.; Mahrt, L. Quality control and flux sampling problems for tower and aircraft data. J. Atmos. Ocean. Technol. 1997, 14, 512–526. [Google Scholar] [CrossRef]
- Floors, R.R. Measuring and Modelling of the Wind on the Scale of Tall Wind Turbines. Ph.D. Thesis, Technical University of DenmarkDanmarks Tekniske Universitet, Lyngby, Denmark, 2013. [Google Scholar]
- Klopfenstein, R., Jr. Air velocity and flow measurement using a Pitot tube. ISA Trans. 1998, 37, 257–263. [Google Scholar] [CrossRef]
- Paul, A.R.; Upadhyay, R.R.; Jain, A. A novel calibration algorithm for five-hole pressure probe. Int. J. Eng. Sci. Technol. 2011, 3, 89–95. [Google Scholar] [CrossRef]
- King, L.V. On the convection of heat from small cylinders in a stream of fluid: determination of the convection constants of small platinum wires with applications to hot-wire anemometry. Philos. Trans. R. Soc. Lond. A 1914, 214, 373–432. [Google Scholar] [CrossRef]
- Jørgensen, F.E. How to Measure Turbulence With Hot-Wire Anemometers—A Practical Guide; Dantec Dynamics A/S: Skovlunde, Denmark, 2002. [Google Scholar]
- Wilson, J.W.; Weckwerth, T.M.; Vivekanandan, J.; Wakimoto, R.M.; Russell, R.W. Boundary layer clear-air radar echoes: Origin of echoes and accuracy of derived winds. J. Atmos. Ocean. Technol. 1994, 11, 1184–1206. [Google Scholar] [CrossRef]
- Kallistratova, M.A.; Kouznetsov, R.D. A note on sodar return signals in the stable atmospheric boundary layer. Meteorol. Z. 2009, 18, 297–307. [Google Scholar] [CrossRef]
- Emeis, S.; Harris, M.; Banta, R.M. Boundary-layer anemometry by optical remote sensing for wind energy applications. Meteorol. Z. 2007, 16, 337–347. [Google Scholar] [CrossRef]
- Sathe, A.; Mann, J. A review of turbulence measurements using ground-based wind lidars. Atmos. Meas. Tech. 2013, 6, 3147. [Google Scholar] [CrossRef] [Green Version]
- Barthelmie, R.J.; Wang, H.; Doubrawa, P.; Pryor, S. Best Practice for Measuring Wind Speeds and Turbulence Offshore through In-Situ and Remote Sensing Technologies; Technical report; Cornell University: Upson Hall, NY, USA, 2016. [Google Scholar]
- Sathe, A.; Banta, R.; Pauscher, L.; Vogstad, K.; Schlipf, D.; Wylie, S. Estimating Turbulence Statistics and Parameters From Ground- and Nacelle-Based Lidar Measurements: IEA Wind Expert Report; Technical Report; DTU Wind Energy: Lyngby, Denmark, 2015. [Google Scholar]
- Päschke, E.; Leinweber, R.; Lehmann, V. An assessment of the performance of a 1.5 μm Doppler lidar for operational vertical wind profiling based on a 1-year trial. Atmos. Meas. Tech. 2015, 8, 2251. [Google Scholar] [CrossRef]
- Traeumner, K.; Wieser, A.; Ruck, B.; Frank, C.; Röhner, L.; Kottmeier, C. The suitability of Doppler lidar for characterizing the wind field above forest edges. Forestry 2012, 85, 399–412. [Google Scholar] [CrossRef]
- Banta, R.M.; Pichugina, Y.L.; Brewer, W.A. Turbulent velocity-variance profiles in the stable boundary layer generated by a nocturnal low-level jet. J. Atmos. Sci. 2006, 63, 2700–2719. [Google Scholar] [CrossRef]
- Banta, R.M.; Pichugina, Y.L.; Kelley, N.D.; Hardesty, R.M.; Brewer, W.A. Wind energy meteorology: Insight into wind properties in the turbine-rotor layer of the atmosphere from high-resolution Doppler lidar. Bull. Am. Meteorol. Soc. 2013, 94, 883–902. [Google Scholar] [CrossRef]
- Peña, A.; Hasager, C.B.; Badger, M.; Barthelmie, R.J.; Bingöl, F.; Cariou, J.-P.; Emeis, S.; Frandsen, S.T.; Harris, M.; Karagali, I.; et al. Remote Sensing for Wind Energy; DTU Wind Energy: Roskilde, Denmark, 2015. [Google Scholar]
- Peña, A.; Gryning, S.E.; Hahmann, A.N. Observations of the atmospheric boundary layer height under marine upstream flow conditions at a coastal site. J. Geophys. Rese. Atmos. 2013, 118, 1924–1940. [Google Scholar] [CrossRef]
- Gryning, S.E.; Floors, R.; Peña, A.; Batchvarova, E.; Brümmer, B. Weibull wind-speed distribution parameters derived from a combination of wind-lidar and tall-mast measurements over land, coastal and marine sites. Bound. Layer Meteorol. 2016, 159, 329–348. [Google Scholar] [CrossRef] [Green Version]
- Manninen, A.J.; O’Connor, E.J.; Vakkari, V.; Petäjä, T. A generalised background correction algorithm for a Halo Doppler lidar and its application to data from Finland. Atmos. Meas. Tech. 2016, 9, 817. [Google Scholar] [CrossRef]
- Gryning, S.E.; Batchvarova, E.; Brümmer, B.; Jørgensen, H.; Larsen, S. On the extension of the wind profile over homogeneous terrain beyond the surface boundary layer. Bound. Layer Meteorol. 2007, 124, 251–268. [Google Scholar] [CrossRef]
- Dione, C.; Lothon, M.; Badiane, D.; Campistron, B.; Couvreux, F.; Guichard, F.; Sall, S. Phenomenology of Sahelian convection observed in Niamey during the early monsoon. Q. J. R. Meteorol. Soc. 2014, 140, 500–516. [Google Scholar] [CrossRef]
- Taylor, G.I. The spectrum of turbulence. Proc. R. Soc. Lond. 1938, 164, 476–490. [Google Scholar] [CrossRef]
- Patton, E.G.; Sullivan, P.P.; Shaw, R.H.; Finnigan, J.J.; Weil, J.C. Atmospheric Stability Influences on Coupled Boundary Layer and Canopy Turbulence. J. Atmos. Sci. 2016, 73, 1621–1647. [Google Scholar] [CrossRef]
- Emeis, S. Current issues in wind energy meteorology. Meteorol. Appl. 2014, 21, 803–819. [Google Scholar] [CrossRef]
- Gupta, S.G.; Ghonge, M.M.; Jawandhiya, P. Review of unmanned aircraft system (UAS). Int. J. Adv. Res. Comput. Eng. Technol. 2013, 2, 1646. [Google Scholar]
- Reuder, J.; Jonassen, M.; Ólafsson, H. The Small Unmanned Meteorological Observer SUMO: Recent developments and applications of a micro-UAS for atmospheric boundary layer research. Acta Geophys. 2012, 60, 1454–1473. [Google Scholar] [CrossRef]
- Cassano, J.J.; Seefeldt, M.W.; Knuth, S.L.; Bradley, A.C.; Herrman, P.D.; Kernebone, P.A.; Logan, N.J. Observations of the atmosphere and surface state over Terra Nova Bay, Antarctica, using unmanned aerial systems. Earth Syst. Sci. Data 2016, 8, 115. [Google Scholar] [CrossRef]
- Intrieri, J.; de Boer, G.; Shupe, M.; Spackman, J.; Wang, J.; Neiman, P.; Wick, G.; Hock, T.; Hood, R. Global Hawk dropsonde observations of the Arctic atmosphere obtained during the Winter Storms and Pacific Atmospheric Rivers (WISPAR) field campaign. Atmos. Meas. Tech. 2014, 7, 3917–3926. [Google Scholar] [CrossRef]
- Palomäki, R.T.; Rose, N.T.; van den Bossche, M.; Sherman, T.J.; De Wekker, S.F. Wind estimation in the lower atmosphere using multirotor aircraft. J. Atmos. Ocean. Technol. 2017, 34, 1183–1191. [Google Scholar] [CrossRef]
- METEK GmbH. USA-1 User Manual; Meteorologische Messtechnik GmbH: Elmshorn, Germany, 2008. [Google Scholar]
- Campbell Scientific, Inc. CSAT3 Three Dimensional Sonic Anemometer Instruction Manual; Campbell Scientific, Inc.: Logan, UT, USA, 2014. [Google Scholar]
- Vaisala. User’s Guide: Anemometer WAA151; Vaisala Oyj: Helsinki, Finland, 2002. [Google Scholar]
- Pielke, R.A., Jr.; Landsea, C.W. Normalized hurricane damages in the United States: 1925–95. Weather Forecast. 1998, 13, 621–631. [Google Scholar] [CrossRef]
- Murià-Vila, D.; Jaimes, M.Á.; Pozos-Estrada, A.; López, A.; Reinoso, E.; Chávez, M.M.; Peña, F.; Sánchez-Sesma, J.; López, O. Effects of hurricane Odile on the infrastructure of Baja California Sur, Mexico. Nat. Hazards 2018, 91, 1–19. [Google Scholar] [CrossRef]
- Hock, T.F.; Franklin, J.L. The NCAR GPS dropwindsonde. Bull. Am. Meteorol. Soc. 1999, 80, 407–420. [Google Scholar] [CrossRef]
- Powell, M.D.; Vickery, P.J.; Reinhold, T.A. Reduced drag coefficient for high wind speeds in tropical cyclones. Nature 2003, 422, 279. [Google Scholar] [CrossRef] [PubMed]
- World Meteorological Organization. WMO Publication No. 306—Manual on Codes, Volume I.1 (2017 Update), Part A—Alphanumeric Codes; Technical report; World Meteorological Organization: Geneva, Switzerland, 2011. [Google Scholar]
- World Meteorological Organization. WMO Publication No. 306–Manual on Codes, Volume II (2017 Update), Regional Codes and National Coding Practices; Technical report; World Meteorological Organization: Geneva, Switzerland, 2011. [Google Scholar]
- World Meteorological Organization. WMO Publication No. 306—Manual on Codes, Volume I.2 (2016 Update), Part B—Binary Codes; Technical report; Technical report; World Meteorological Organization: Geneva, Switzerland, 2015. [Google Scholar]
- Nadolski, V. Automated Surface Observing System (ASOS) User’s Guide; National Oceanic and Atmospheric Administration, Department of Defense, Federal Aviation Administration, United States Navy: Philadelphia, PA, USA, 1998.
- Lindelöw, P.J.P.; Friis Pedersen, T.; Gottschall, J.; Vesth, A.; Wagner, R.; Schmidt Paulsen, U.; Courtney, M. Flow Distortion on Boom Mounted Cup Anemometers; Technical report; Danmarks Tekniske Universitet, Risø Nationallaboratoriet for Bæredygtig Energi: Lyngby, Danmark, 2010; Technical report. [Google Scholar]
- Wieringa, J. Gust factors over open water and built-up country. Bound. Layer Meteorol. 1973, 3, 424–441. [Google Scholar] [CrossRef]
- Woetmann Nielsen, N.; Petersen, C. Calculation of wind gusts in DMI-HIRLAM. In Scientific Report 01-03; Danish Meteorological Institute: Copenhagen, Denmark, 2001. [Google Scholar]
- Brasseur, O. Development and application of a physical approach to estimating wind gusts. Mon. Weather Rev. 2001, 129, 5–25. [Google Scholar] [CrossRef]
- Goyette, S.; Brasseur, O.; Beniston, M. Application of a new wind gust parameterization: Multiscale case studies performed with the Canadian regional climate model. J. Geophys. Res. Atmos. 2003, 108, D13. [Google Scholar] [CrossRef]
- Belušić, D.; Klaić, Z.B. Estimation of bora wind gusts using a limited area model. Tellus A 2004, 56, 296–307. [Google Scholar] [CrossRef]
- Ágústsson, H.; Ólafsson, H. Forecasting wind gusts in complex terrain. Meteorol. Atmos. Phys. 2009, 103, 173–185. [Google Scholar] [CrossRef]
- Pinto, J.G.; Neuhaus, C.P.; Krüger, A.; Kerschgens, M. Assessment of the wind gust estimate method in mesoscale modelling of storm events over West Germany. Meteorol. Z. 2009, 18, 495–506. [Google Scholar] [CrossRef]
- Tammelin, B.; Vihma, T.; Atlaskin, E.; Badger, J.; Fortelius, C.; Gregow, H.; Horttanainen, M.; Hyvönen, R.; Kilpinen, J.; Latikka, J.; et al. Production of the Finnish wind atlas. Wind Energy 2013, 16, 19–35. [Google Scholar] [CrossRef]
- Jonassen, M.O.; Tisler, P.; Altstädter, B.; Scholtz, A.; Vihma, T.; Lampert, A.; König-Langlo, G.; Lüpkes, C. Application of remotely piloted aircraft systems in observing the atmospheric boundary layer over Antarctic sea ice in winter. Polar Res. 2015, 34, 25651. [Google Scholar] [CrossRef]










© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Suomi, I.; Vihma, T. Wind Gust Measurement Techniques—From Traditional Anemometry to New Possibilities. Sensors 2018, 18, 1300. https://doi.org/10.3390/s18041300
Suomi I, Vihma T. Wind Gust Measurement Techniques—From Traditional Anemometry to New Possibilities. Sensors. 2018; 18(4):1300. https://doi.org/10.3390/s18041300
Chicago/Turabian StyleSuomi, Irene, and Timo Vihma. 2018. "Wind Gust Measurement Techniques—From Traditional Anemometry to New Possibilities" Sensors 18, no. 4: 1300. https://doi.org/10.3390/s18041300
APA StyleSuomi, I., & Vihma, T. (2018). Wind Gust Measurement Techniques—From Traditional Anemometry to New Possibilities. Sensors, 18(4), 1300. https://doi.org/10.3390/s18041300