An Equivalent Circuit of Longitudinal Vibration for a Piezoelectric Structure with Losses

Abstract
:1. Introduction
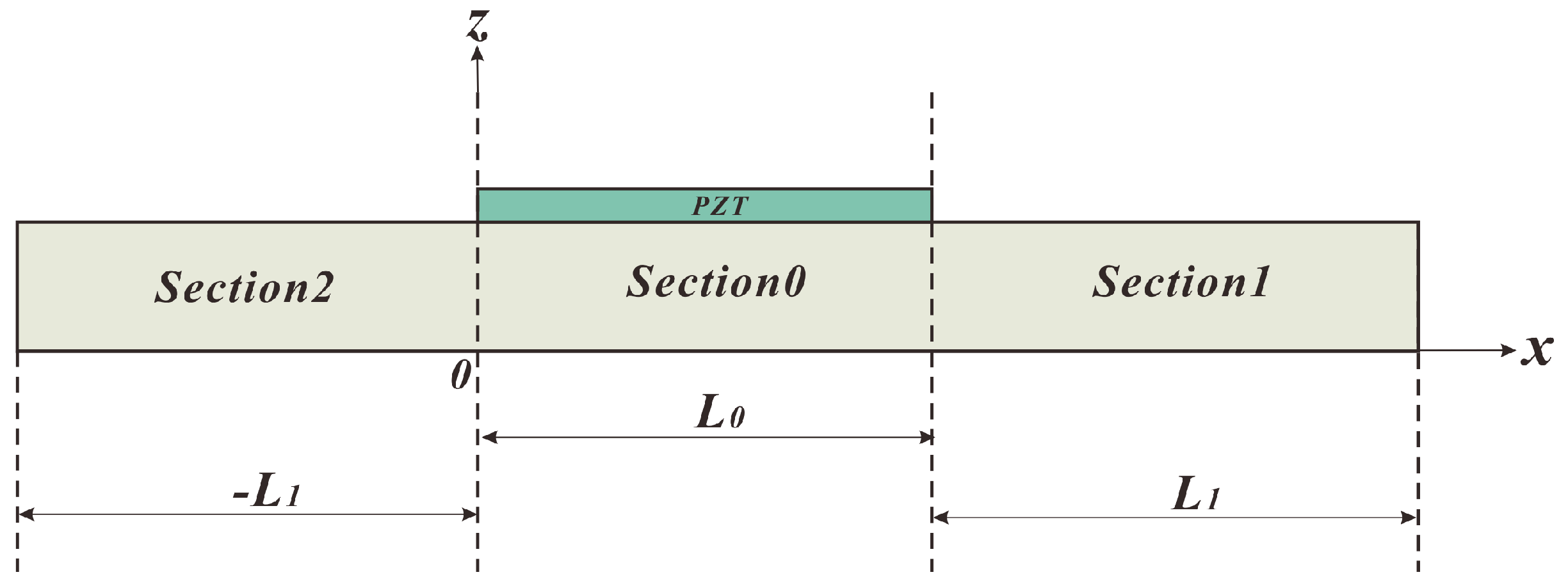
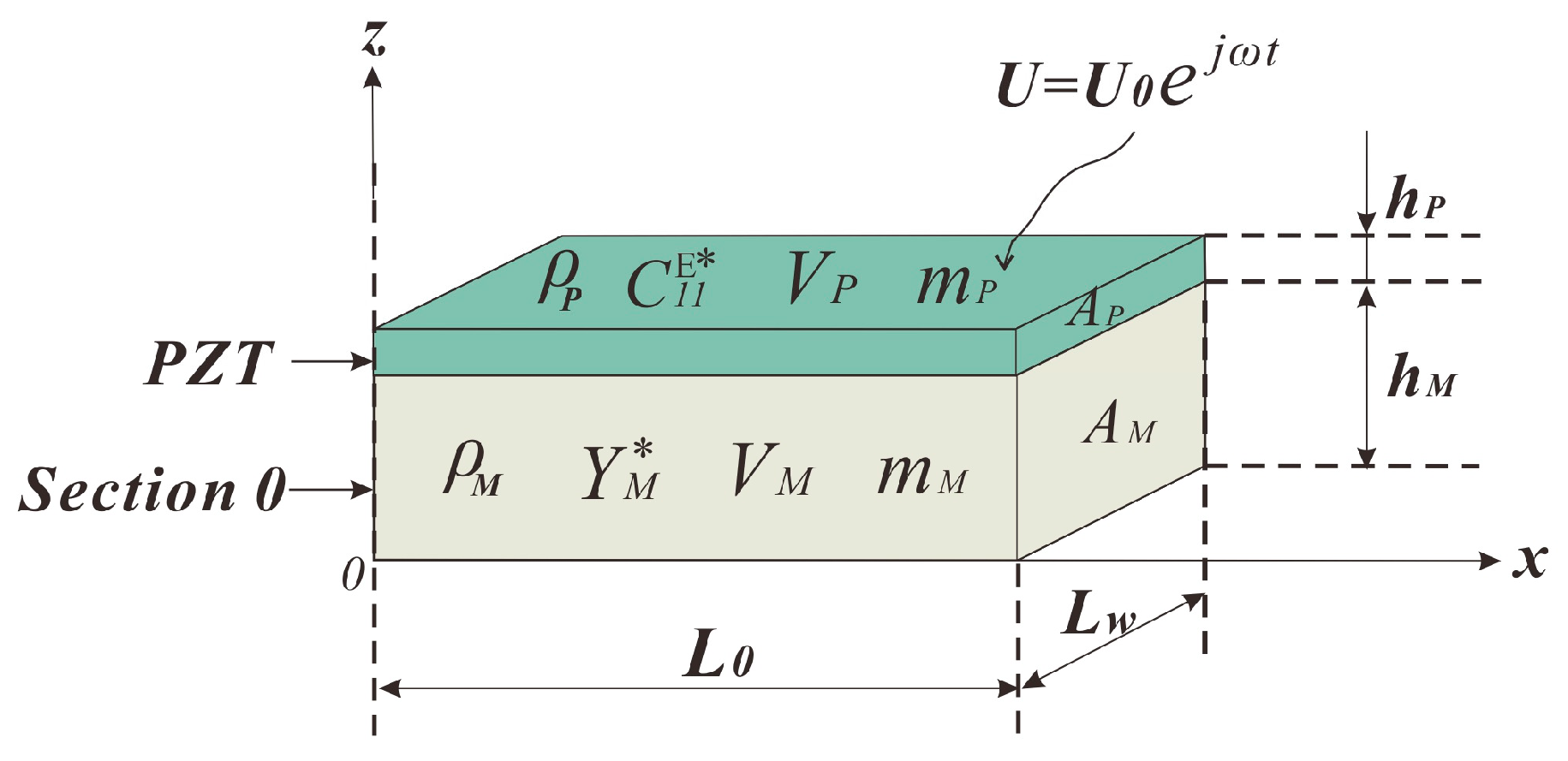
2. Loss and Motion Equation of the Piezoelectric Structure
3. Equivalent Circuit with Four Kinds of Losses
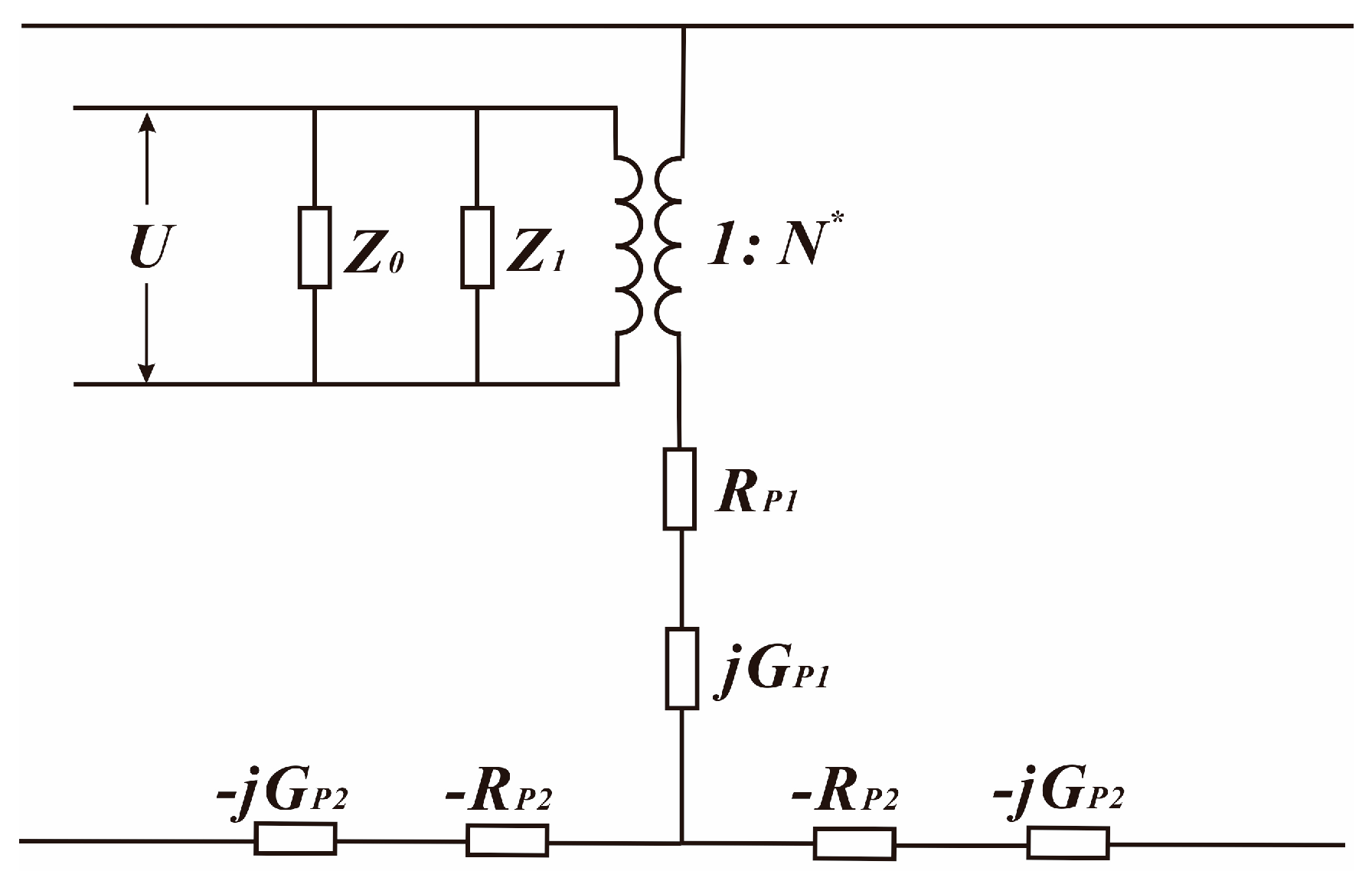
3.1. Equivalent Circuit of PZT
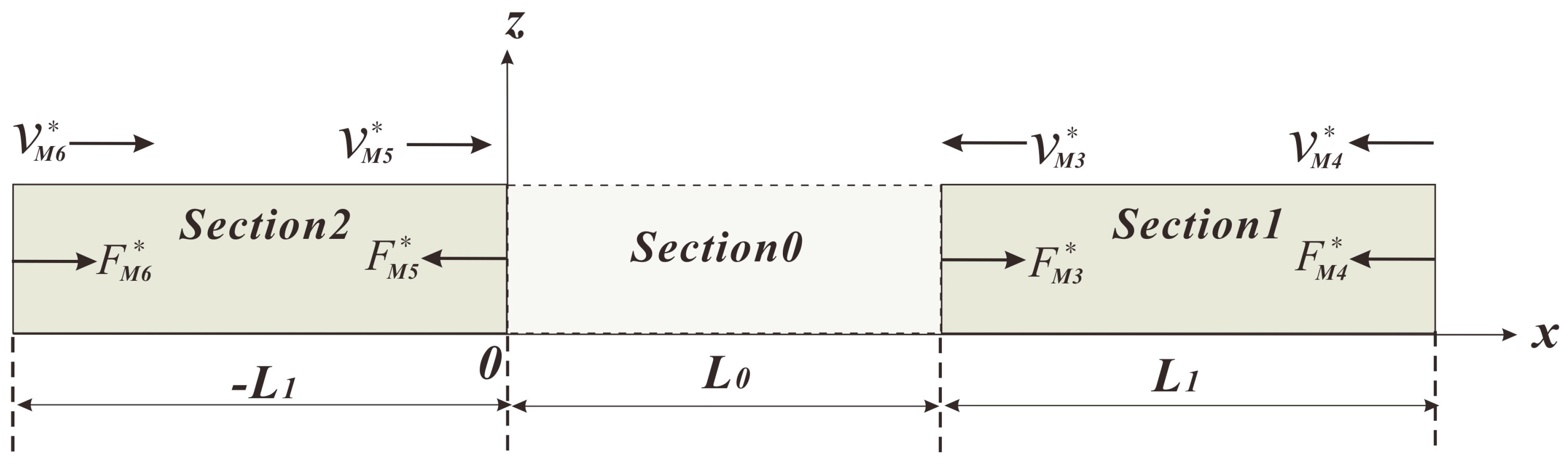
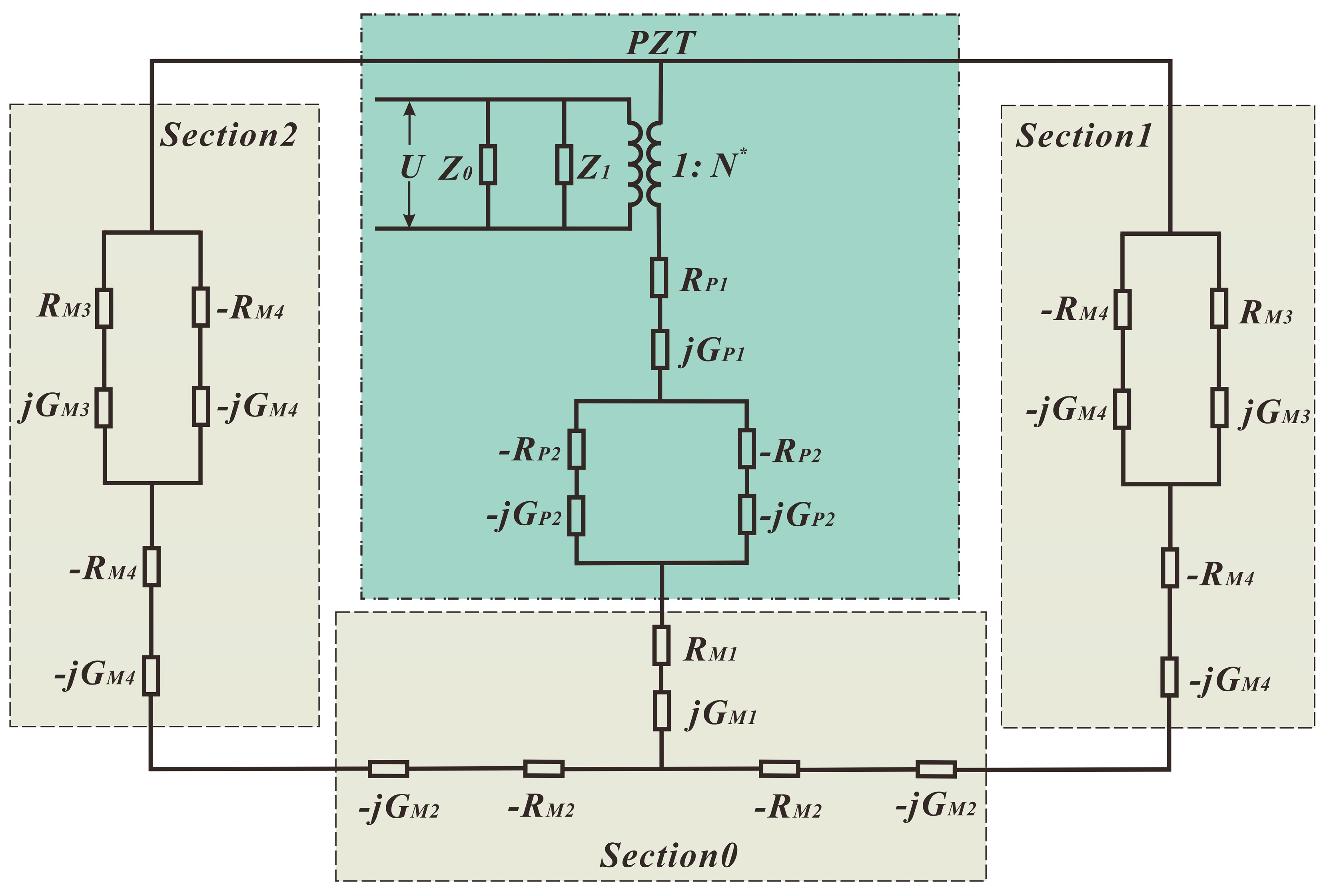
3.2. Equivalent Circuit of Section 0 and Complete Equivalent Circuit
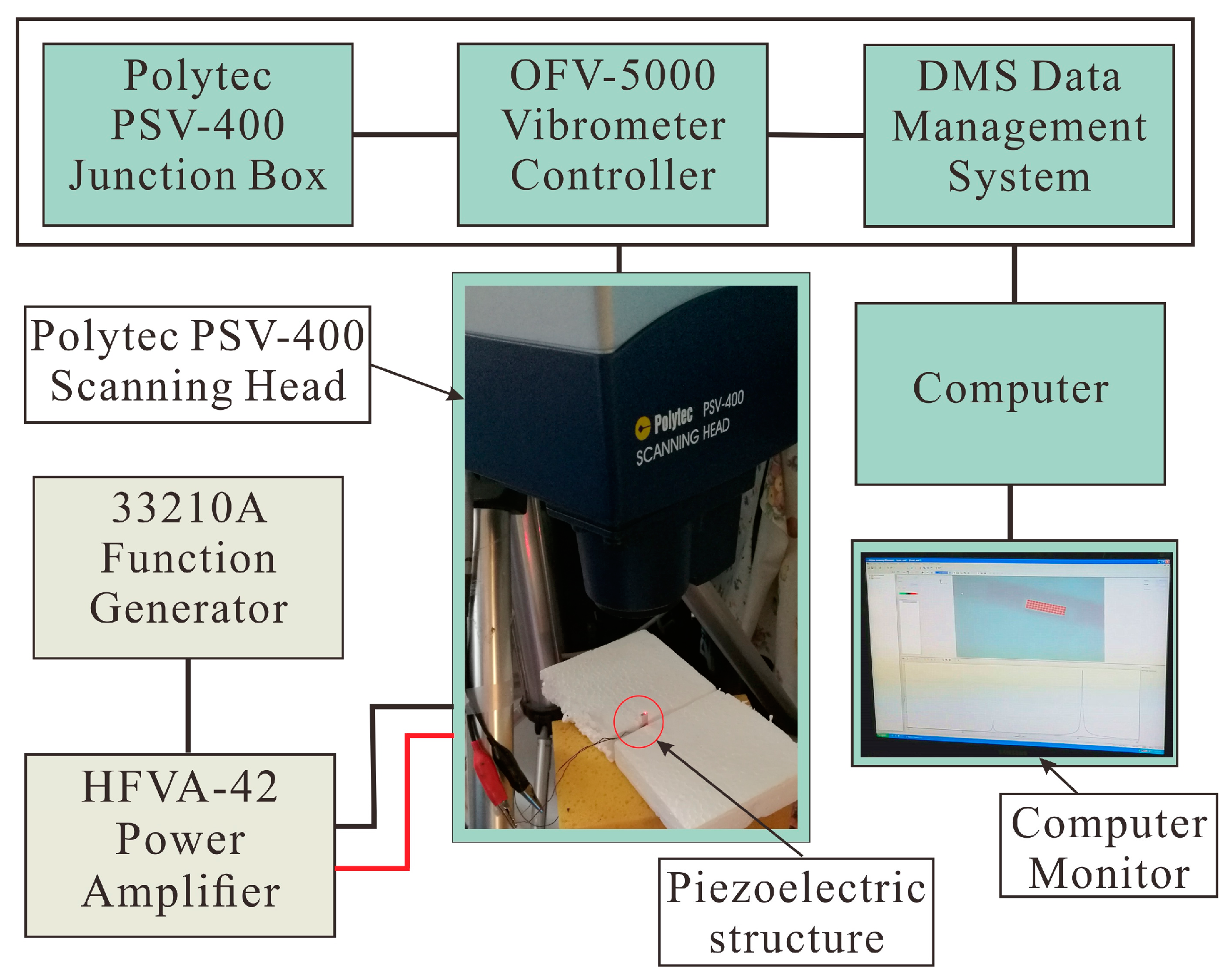
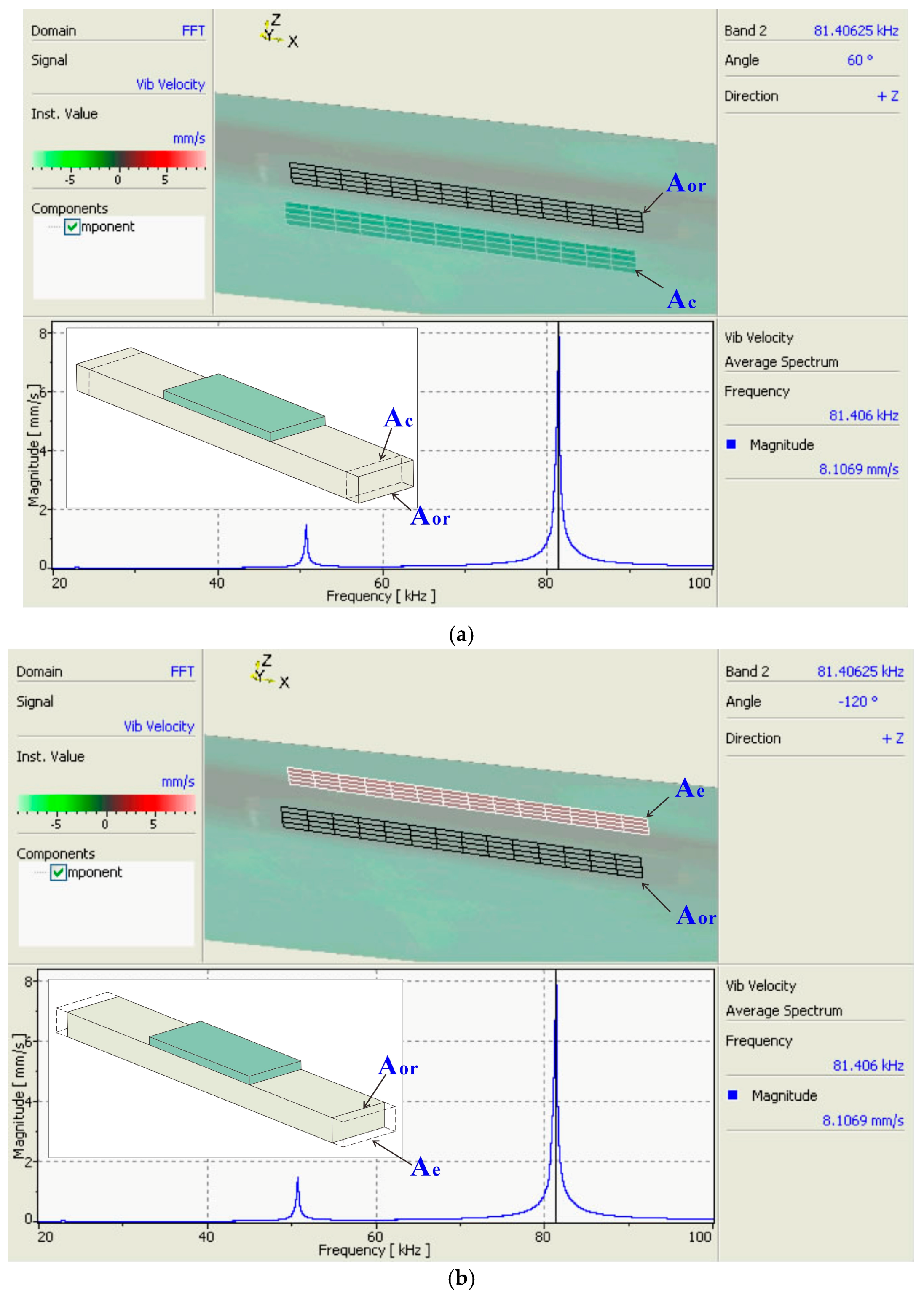
4. Experiment
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Appendix A
Appendix B

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Meaning |
|---|---|
| Ac | cross-sectional area of metal substrate in contraction situation |
| Ae | cross-sectional area of metal substrate in extension situation |
| α | coefficient in displacement formula |
| AM | cross-sectional area of metal substrate |
| Aor | cross-sectional area of metal substrate in original position |
| AP | cross-sectional area of PZT |
| β | coefficient in displacement formula |
| capacitor as a complex number | |
| C01 | real part of |
| C02 | imaginary part of |
| stiffness under constant electric field | |
| stiffness under constant electric field as a complex number | |
| piezoelectric constant | |
| piezoelectric constant as a complex number | |
| electric displacement of z-direction as a complex number | |
| (i = 1, 2) | coefficients in the formula of equivalent circuit |
| piezoelectric constant as a complex number | |
| dielectric constant under constant stress | |
| dielectric constant under constant stress as a complex number | |
| E3 | electric field in z-direction |
| fA | antiresonance frequency |
| fR | resonance frequency |
| (i = 1, …, 6) | forces of metal substrate as a complex number |
| (i = 1, 2) | forces of PZT as a complex number |
| GMi (i = 1, …, 4) | imaginary parts of complex numbers in equivalent circuit of metal substrate |
| GPi (i = 1, 2) | imaginary parts of complex numbers in equivalent circuit of PZT |
| thickness of metal substrate | |
| thickness of PZT | |
| I* | current as a complex number |
| j | imaginary notation |
| wave number as a complex number | |
| KOA | coefficients in the formula of equivalent circuit |
| KOB | coefficients in the formula of equivalent circuit |
| L0 | length of Section 0 |
| L1 | length of Section 1 and Section 2 |
| Lw | width of piezoelectric structure |
| weight of metal substrate in Section 0 | |
| weight of PZT in Section 0 | |
| N* | force factor as a complex number |
| velocity as a complex number | |
| (i = 1, …, 6) | velocity of metal substrate as a complex number |
| (i = 1, 2) | velocity of PZT as a complex number |
| ω | angular frequency |
| (i = 1, …, 20) | coefficients in the formula of equivalent circuit |
| Q* | charge of PZT electrode surface |
| density of composite structure | |
| density of metal substrate | |
| density of PZT | |
| RMi (i = 1, …, 4) | real parts of complex numbers in equivalent circuit of metal substrate |
| RPi (i= 1, 2) | real parts of complex numbers in equivalent circuit of PZT |
| strain as a complex number | |
| compliance under constant electric field | |
| compliance under constant electric field as a complex number | |
| t | time |
| “intensive” dielectric loss factor of PZT | |
| “intensive” elastic loss factor of PZT | |
| elastic loss factor of metal substrate | |
| “extensive” elastic loss factor of PZT | |
| “intensive” piezoelectric loss factor of PZT | |
| u* | displacement along the x-direction |
| U | driving voltage |
| amplitude of driving voltage | |
| volume of metal substrate in Section 0 | |
| volume of PZT | |
| stress as a complex number | |
| stress of metal substrate as a complex number | |
| stress of PZT as a complex number | |
| composite Young’s modulus as a complex number | |
| YM | Young’s modulus of metal substrate |
| Young’s modulus of metal substrate as a complex number | |
| Z0 | the expression of C01 in equivalent circuit |
| Z1 | the expression of C02 in equivalent circuit |
| ZfA | impedance in antiresonance frequency |
| ZfR | impedance in resonance frequency |
References
- Zhu, C.; Chu, X.; Yuan, S.; Zhong, Z.; Zhao, Y.; Gao, S. Development of an ultrasonic linear motor with ultra-positioning capability and four driving feet. Ultrasonics 2016, 72, 66–72. [Google Scholar] [CrossRef] [PubMed]
- El-Sayed, A.M.; Abo-Ismail, A.; El-Melegy, M.T.; Hamzaid, N.A.; Osman, N.A.A. Development of a Micro-Gripper Using Piezoelectric Bimorphs. Sensors 2013, 13, 5826–5840. [Google Scholar] [CrossRef] [PubMed]
- Faegh, S.; Jalili, N.; Sridhar, S. A self-sensing piezoelectric microcantilever biosensor for detection of ultrasmall adsorbed masses: Theory and experiments. Sensors 2013, 13, 6089–6108. [Google Scholar] [CrossRef] [PubMed]
- Sherrit, S.; Olazábal, V.; Sansiñena, J.M.; Bao, X.; Chang, Z.; Bar-Cohen, Y. The use of piezoelectric resonators for the characterization of mechanical properties of polymers. In Proceedings of the SPIE’s 9th Annual International Symposium on Smart Structures and Materials, San Diego, CA, USA, 11 July 2002. [Google Scholar]
- Ballato, A. Modeling piezoelectric and piezomagnetic devices and structures via equivalent networks. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2001, 48, 1189–1240. [Google Scholar] [CrossRef] [PubMed]
- Marschner, U.; Datta, S.; Starke, E.; Fischer, W.; Flatau, A.B. Equivalent circuit of a piezomagnetic unimorph incorporating single-crystal Galfenol. IEEE Trans. Magn. 2014, 50, 1–4. [Google Scholar] [CrossRef]
- Granstaff, V.E.; Martin, S.J. Characterization of a thickness-shear layers mode quartz resonator with multiple nonpiezoelectric layers. J. Appl. Phys. 1994, 75, 1319–1329. [Google Scholar] [CrossRef]
- Mason, W.P. An electromechanical representation of a piezoelectric crystal used as a transducer. Proc. Inst. Radio Eng. 1935, 23, 1252–1263. [Google Scholar]
- Germano, C.P. Flexure mode piezoelectric transducers. IEEE Trans. Audio Electroacoust. 1971, 19, 6–12. [Google Scholar] [CrossRef]
- Bao, X.Q.; Varadan, V.K.; Varadan, V.V.; Howarth, T.R. Model of a bilaminar actuator for active acoustic control systems. J. Acoust. Soc. Am. 1990, 87, 1350–1352. [Google Scholar] [CrossRef]
- Yang, Y.; Tang, L. Equivalent Circuit Modeling of Piezoelectric Energy Harvesters. J. Intel. Mater. Syst. Struct. 2009, 20, 2223–2235. [Google Scholar] [CrossRef]
- Wang, H.; Tang, L.; Shan, X.; Xie, T.; Yang, Y. Modeling and performance evaluation of a piezoelectric energy harvester with segmented electrodes. Smart Struct. Syst. 2014, 14, 247–266. [Google Scholar] [CrossRef]
- Tomikawa, Y.; Takano, T.; Umeda, H. Thin rotary and linear ultrasonic motors using a double-mode piezoelectric vibrator of the first longitudinal and second bending modes. Jpn. J. Appl. Phys. 1992, 31, 3073–3076. [Google Scholar] [CrossRef]
- Bein, T.; Breitbach, E.J.; Uchino, K. A linear ultrasonic motor using the first longitudinal and the fourth bending mode. Smart Mater. Struct. 1997, 6, 619–627. [Google Scholar] [CrossRef]
- Zhai, B.; Lim, S.; Lee, K.; Dong, S.; Lu, P. A modified ultrasonic linear motor. Sensor Actuators A Phys. 2000, 86, 154–158. [Google Scholar] [CrossRef]
- Park, T.; Kim, B.; Kim, M.; Uchino, K. Characteristics of the first longitudinal-fourth bending mode linear ultrasonic motors. Jpn. J. Appl. Phys. 2002, 41, 7139–7143. [Google Scholar] [CrossRef]
- Rho, J.; Kim, B.; Lee, C.; Joo, H.; Jung, H. Design and characteristic analysis of L1B4 ultrasonic motor considering contact mechanism. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2005, 52, 2054–2064. [Google Scholar] [PubMed]
- Dong, S.; Zhai, J. Equivalent circuit method for static and dynamic analysis of magnetoelectric laminated composites. Chin. Sci. Bull. 2008, 53, 2113–2123. [Google Scholar] [CrossRef]
- Dong, S.; Li, J.; Viehland, D. Longitudinal and transverse magnetoelectric voltage number of magnetostrictive/piezoelectric laminate composite: theory. IEEE Trans Ultrason. Ferroelectr. Freq. Control 2003, 50, 1253–1261. [Google Scholar] [CrossRef] [PubMed]
- Holland, R. Representation of dielectric, elastic, and piezoelectric losses by complex numbers. IEEE Trans Son. Ultrason. 1967, 14, 18–20. [Google Scholar] [CrossRef]
- Uchino, K.; Zhuang, Y.; Ural, S.O. Loss determination methodology for a piezoelectric ceramic: New phenomenological theory and experimental proposals. J. Adv. Dielectr. 2011, 1, 17–31. [Google Scholar] [CrossRef]
- Sherrit, S.; Leary, S.P.; Dolgin, B.P.; Bar-Cohen, Y. Comparison of the Mason and KLM equivalent circuits for piezoelectric resonators in the thickness mode. IEEE Ultrason. Symp. 1999, 2, 921–926. [Google Scholar]
- Chen, Y.; Wen, Y.; Li, P. Characterization of dissipation factors in terms of piezoelectric equivalent circuit parameters. IEEE Trans Ultrason. Ferroelectr. Freq. Control 2006, 53, 2367–2375. [Google Scholar] [CrossRef] [PubMed]
- Dong, X.; Majzoubi, M.; Choi, M.; Ma, Y.; Hu, M.; Jin, L.; Xu, Z.; Uchino, K. A new equivalent circuit for piezoelectrics with three losses and external loads. Sensor Actuator A Phys. 2017, 256, 77–83. [Google Scholar] [CrossRef]
- Carfagni, M.; Lenzi, E.; Pierini, M. The loss factor as a measure of mechanical damping. Int. Soc. Opt. Eng. 1998, 1, 580–584. [Google Scholar]
- Thomson, W.T.; Dahleh, M.D. Theory of Vibration with Application; Prentice Hall: Upper Saddle River, NJ, USA, 1998. [Google Scholar]
- Montalvão, D.; Cláudio, R.A.L.D.; Ribeiro, A.M.R.; Duarte-Silva, J. Experimental measurement of the complex Young’s modulus on a CFRP laminate considering the constant hysteretic damping model. Compos. Struct. 2013, 97, 91–98. [Google Scholar] [CrossRef]
- Majzoubi, M.; Shekhani, H.N.; Bansal, A.; Hennig, E.; Scholehwar, T.; Uchino, K. Advanced methodology for measuring the extensive elastic compliance and mechanical loss directly in k31 mode piezoelectric ceramic plates. J. Appl. Phys. 2016, 120, 225113. [Google Scholar] [CrossRef]
- Yuan, Y.; Du, H.; Xia, X.; Wong, Y. Analytical solutions to flexural vibration of slender piezoelectric multilayer cantilevers. Smart Mater. Struct. 2014, 23, 095005. [Google Scholar] [CrossRef]
- Ballas, R.G. Piezoelectric Multilayer Beam Bending Actuators: Static and Dynamic Behavior and Aspects of Sensor Integration; Springer: Berlin, Germany, 2007. [Google Scholar]
- Zhou, H.; Li, C.; Xuan, L.; Wei, J.; Zhao, J. Equivalent circuit method research of resonant magnetoelectric characteristic in magnetoelectric laminate composites using nonlinear magnetostrictive constitutive model. Smart Mater. Struct. 2011, 20, 035001. [Google Scholar] [CrossRef]
- Berlincourt, D.A.; Curran, D.R.; Jaffe, H. Piezoelectric and Piezomagnetic Materials and Their Function in Transducers. In Physical Acoustics Principles and Methods; Volume 1-Part A; Mason, W.P., Ed.; Academic Press: New York, NY, USA; London, UK, 1964; pp. 233–250. [Google Scholar]
- Colakoglu, M. Factors effecting internal damping in aluminum. J. Theor. Appl. Mech. 2004, 42, 95–105. [Google Scholar]
- Cherif, R.; Chazot, J.; Atalla, N. Damping loss factor estimation of two-dimensional orthotropic structures from a displacement field measurement. J. Sound Vib. 2015, 356, 61–71. [Google Scholar] [CrossRef]
- Ege, K.; Boncompagne, T.; Guyader, J.; Laulagnet, B. Experimental estimations of viscoelastic properties of multilayer damped plates in broad-band frequency range. arXiv, 2012; arXiv:1210.3333. [Google Scholar]










| Parameter | |||||
|---|---|---|---|---|---|
| Value | 10−3 | 10−3 | 10−2 | 10−3 | 10−3 |
| Parameter | Value | Parameter | Value | Parameter | Value |
|---|---|---|---|---|---|
| L0 (mm) | 12.60 | hP (mm) | 0.7000 | (m2/N) | 15.00 × 10−12 |
| L1 (mm) | 10.40 | (kg/m3) | 2700 | d31 (C/N) | −185.0 × 10−12 |
| Lw (mm) | 5.300 | (kg/m3) | 7450 | 1750 | |
| hM (mm) | 2.100 | YM (Gpa) | 69.00 | (N/m2) | 15.00 × 1010 |
| fR (Hz) | fA (Hz) | ZfR (Ω) | ZfA (Ω) | |
|---|---|---|---|---|
| Experiment | 81,500 | 82,280 | 143.78 | 15,479 |
| EC with PZT losses and Al loss | 81,516 | 82,295 | 137.50 | 14,169 |
| Percentage of error (%) | 0.019632 | 0.018230 | 4.3678 | 8.4631 |
| EC with only PZT losses | 81,520 | 82,291 | 89.301 | 20,765 |
| Percentage of error (%) | 0.024540 | 0.013369 | 37.890 | 34.149 |
| EC with only Al loss | 81,521 | 82,287 | 49.116 | 43,724 |
| Percentage of error (%) | 0.025767 | 0.0085075 | 65.839 | 182.47 |
| EC without PZT losses and Al loss | 81,522 | 82,287 | 0.24246 | 2,817,880 |
| Percentage of error (%) | 0.026994 | 0.0085075 | 99.831 | 18,105 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yuan, T.; Li, C.; Fan, P. An Equivalent Circuit of Longitudinal Vibration for a Piezoelectric Structure with Losses. Sensors 2018, 18, 947. https://doi.org/10.3390/s18040947
Yuan T, Li C, Fan P. An Equivalent Circuit of Longitudinal Vibration for a Piezoelectric Structure with Losses. Sensors. 2018; 18(4):947. https://doi.org/10.3390/s18040947
Chicago/Turabian StyleYuan, Tao, Chaodong Li, and Pingqing Fan. 2018. "An Equivalent Circuit of Longitudinal Vibration for a Piezoelectric Structure with Losses" Sensors 18, no. 4: 947. https://doi.org/10.3390/s18040947
APA StyleYuan, T., Li, C., & Fan, P. (2018). An Equivalent Circuit of Longitudinal Vibration for a Piezoelectric Structure with Losses. Sensors, 18(4), 947. https://doi.org/10.3390/s18040947