2D Analytical Model for the Directivity Prediction of Ultrasonic Contact Type Transducers in the Generation of Guided Waves



Abstract
:1. Introduction
- The location of the transducer can be changed;
- The excitation frequency of a transducer can be changed;
- The type of wave mode (e.g., the S0, A0 or SH0 in low-frequency (LF) ultrasonic) can be changed;
- The utilization of the transducers array or different configuration of transducers can also be an alternative;
2. Development of 2D Analytical Model
- The ultrasonic contact type transducer of any shape and size can be assumed as uniformly distributed point sources on a 2D surface.
- Create the equally spaced arbitrarily receiving points (elements) along the half-circle (0° to 180°) at the required distance (radius) from the center of the transducer (origin).
- Calculate the distance vectors from all point sources to each arbitrary receiving element and integrate them.
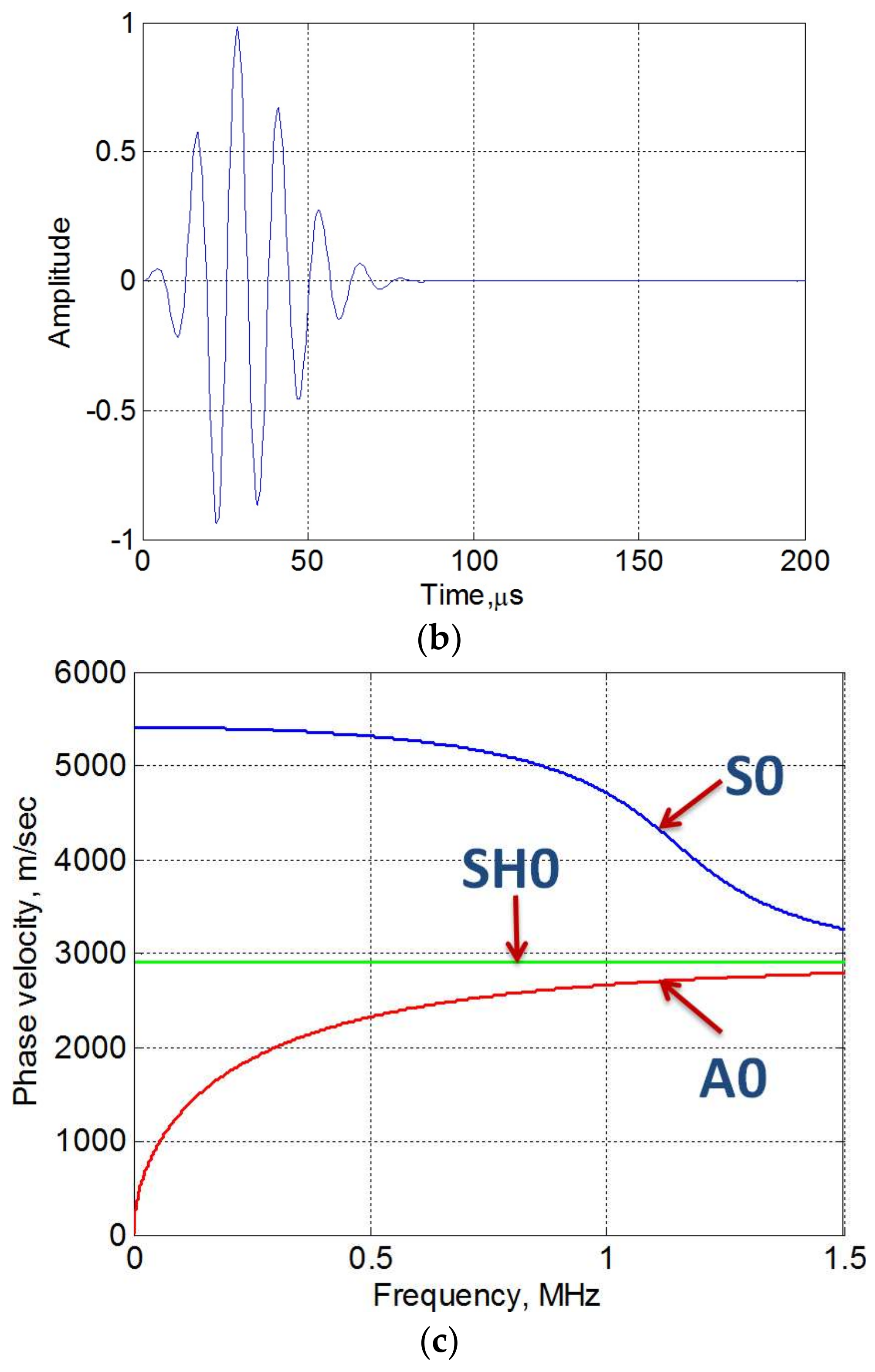
- Compute the theoretical phase velocity characteristics of the propagating modes in a medium by the “Disperse” [26] computational package.
- Calculate the transfer function which is the multiplication of phase and attenuation components and depends on the excitation frequency, distance vector and the phase velocity of the propagating wave modes.
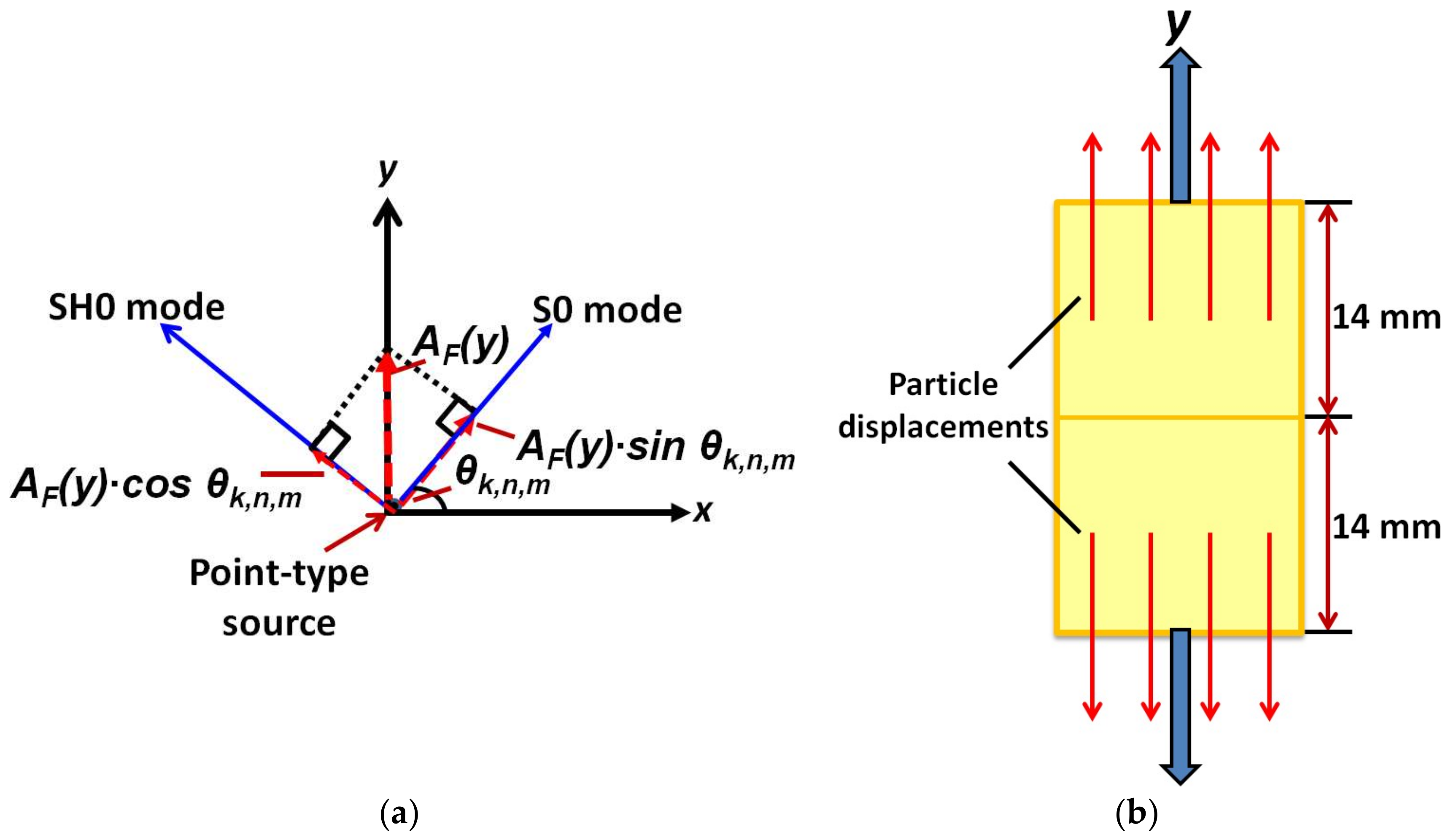
- The input signal is necessary to be multiplied by the correction factor (amplitude factor and direction factor). The amplitude factor depends on the type of propagating modes (e.g., the S0, A0, and SH0 in LF ultrasonic) and describes the signal distribution along the structure of transducer. The direction factor corresponds to the direction of propagating wave modes. The detailed description of the correction factor is discussed in Section 2.1.
- Take an account the diffraction in distances and calculate the distance diffraction factor.
- Calculate the output spectrum by multiplying the transfer function, corrected input signal spectrum (Fourier transform of the input signal after multiplying by correction factor) and the distance-dependent diffraction factor.
- Calculate the output signal (B-scan or series of A-scans) in time-domain to estimate the directivity pattern of a transducer (by plotting the normalized peak-to-peak amplitudes of the propagating particular modes in the polar coordinates).
2.1. Description of 2D Analytical Modelling
2.2. Demonstration of Analytical Model in the Case of P1-Type MFC Transducer
3. Numerical Simulation Using FE
4. Experimental Investigation
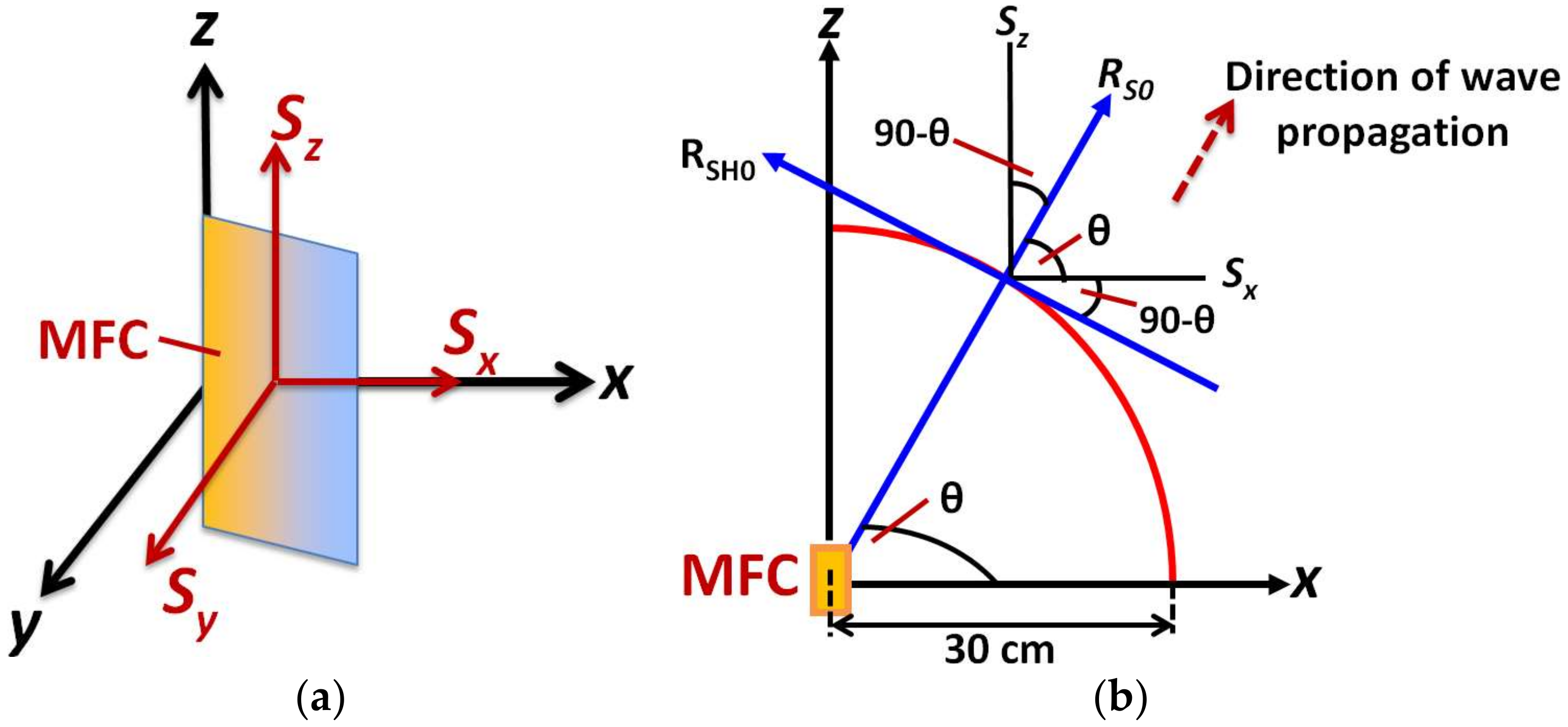
- The quarter circle having the radius of 300 mm and the angular direction from 0 to 90° was divided into the 19 points located at each 5° as shown in Figure 8b. The linear scanning was performed by moving the contact-type transducer up to the 200 mm with a scanning step of 0.5 mm from each point towards the MFC transducer.
- In this way, 19 B-scan images were recorded in total within the angular direction from 0° to 90°. The sampling frequency of 100 MHz was used.
- The two-dimensional Fourier transform (2D-FFT) was applied to each B-scan for the transformation of measurements in distance-time into the spatial frequency-frequency [32,35]. Figure 8c–e shows the dispersion curve generated after applying the 2D-FFT on first B-scan (at 0°), tenth B-scan (at 45°) and nineteenth B-scan (at 90°).
- Although the propagation medium (Al alloy) is isotropic, the MFC is not a point-type transducer and generates not only the fundamental guided Lamb modes (the S0 and A0) but the non-dispersive GW mode (the SH0) is also generated. Therefore, the dispersive characteristics obtained for all 19 B-scans were not similar. In order to select the signals of interest, a rectangular window within the frequency range of 60–110 kHz and spatial frequency range of 0.04–0.075 1/mm was applied on each of the transformed B-scan signal (2D-FFT). The window was selected in such a manner that possible values of signal energies in each case were contained. The application of frequency window on the dispersion curves of the first (at 0°), tenth (at 45°) and nineteenth (at 90°) B-scans are shown in Figure 8b–e.
- Finally, the maximum energy of all 19 signals in the selected window was estimated in order to construct the directivity pattern in the polar coordinates (from 0° to 90°).
5. Results
6. Conclusions
- Development of a 2D analytical model of contact type transducers based on Huygens’s principle capable to draw the directivity patterns within a far shorter processing time as compared to the finite element modelling and experimental investigation.
- Explanation of model for p1-type macro fiber composite (P1-type MFC) transducer manufactured by Smart Material excited by 80 kHz, 5-period excitation signal. The propagation medium was 2 mm aluminum alloy plate. Verification of the results was performed using FE modelling.
- Special experimental scanning and signal processing approach was also proposed in order to estimate the directivity patterns of P1-type MFC transducer glued on 2 mm Al alloy plate and exciting the fundamental modes with the lower interference of additional reverberations.
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Mitra, M.; Gopalakrishnan, S. Guided wave based structural health monitoring: A review. Smart Mater. Struct. 2016, 25, 053001. [Google Scholar] [CrossRef]
- Raghavan, A.; Cesnik, C.E.S.; Raghavan, A.; Cesnik, C.E.S. Review of Guided-Wave Structural Health Monitoring. Shock Vib. Dig. 2007, 39, 91–114. [Google Scholar] [CrossRef]
- Draudvilienė, L.; Raišutis, R.; Žukauskas, E.; Jankauskas, A. Validation of Dispersion Curve Construction Techniques for the A0 and S0 Modes of Lamb Waves. Int. J. Struct. Stab. Dyn. 2014, 14, 1450024. [Google Scholar] [CrossRef]
- Toyama, N.; Takatsubo, J. Lamb wave method for quick inspection of impact-induced delamination in composite laminates. Compos. Sci. Technol. 2004, 64, 1293–1300. [Google Scholar] [CrossRef]
- Edalati, K.; Kermani, A.; Seiedi, M.; Movafeghi, A. Defect detection in thin plates by ultrasonic lamb wave techniques. Int. J. Mater. Prod. Technol. 2006, 27, 156. [Google Scholar] [CrossRef]
- Loveday, P.W.; Long, C.S. Long range guided wave defect monitoring in rail track. AIP Conf. Proc. 2014, 1581, 179–185. [Google Scholar] [CrossRef]
- Zhang, K.; Han, Z.D.; Yuan, K.Y. Long Range Inspection of Rail-Break Using Ultrasonic Guided Wave Excited by Pulse String. Adv. Mater. Res. 2013, 744, 505–510. [Google Scholar] [CrossRef]
- Tiwari, K.; Raisutis, R. Comparative analysis of non-contact ultrasonic methods for defect estimation of composites in remote areas. CBU Int. Conf. Proc. 2016, 4, 846–851. [Google Scholar] [CrossRef]
- Nakamura, K. Ultrasonic Transducers: Materials and Design for Sensors, Actuators and Medical Applications; Woodhead Publishing: Cambridge, UK, 2012; Volume 1, pp. 3–183. ISBN 9781845699895. [Google Scholar]
- Liu, T.; Kitipornchai, S.; Veidt, M. Analysis of acousto-ultrasonic characteristics for contact-type transducers coupled to composite laminated plates. Int. J. Mech. Sci. 2003, 43, 1441–1456. [Google Scholar] [CrossRef]
- Vladišauskas, A.; Šliteris, R.; Raišutis, R.; Seniūnas, G.; Žukauskas, E. Contact ultrasonic transducers for mechanical scanning systems. Ultragarsas (Ultrasound) 2010, 65, 30–35. [Google Scholar]
- Lee, J.R.; Park, C.Y.; Kong, C.W. Simultaneous active strain and ultrasonic measurement using fiber acoustic wave piezoelectric transducers. Smart Struct. Syst. 2013, 11, 185–197. [Google Scholar] [CrossRef]
- Tiwari, K.A.; Raisutis, R.; Samaitis, V. Hybrid Signal Processing Technique to Improve the Defect Estimation in Ultrasonic Non-Destructive Testing of Composite Structures. Sensors 2017, 17, 2858. [Google Scholar] [CrossRef] [PubMed]
- Qi, W.; Cao, W. Finite element study on 1-D array transducer design. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2000, 47, 949–955. [Google Scholar] [CrossRef] [PubMed]
- Leeman, S.; Healey, A.J.; Costa, E.T.; Nicacio, H.; Dantas, R.G.; Maia, J.M. Measurement of transducer directivity function. In Medical Imaging 2001: Ultrasonic Imaging and Signal Processing; International Society for Optics and Photonics: Bellingham, WA, USA, 2001; Volume 4325, pp. 47–54. [Google Scholar]
- Voelz, U. Four-dimensional directivity pattern for fast calculation of the sound field of a phased array transducer. In Proceedings of the 2012 IEEE International Ultrasonics Symposium, Dresden, Germany, 7–10 October 2012; pp. 1035–1038. [Google Scholar]
- Li, D.; Chen, H. Directivity calculation for acoustic transducer arrays with considering mutual radiation impedance. In International Conference on Graphic and Image Processing (ICGIP 2012); International Society for Optics and Photonics: Bellingham, WA, USA, 2013; Volume 8768, p. 876864. [Google Scholar]
- Umchid, S. Directivity Pattern Measurement of Ultrasound Transducers. Int. J. Appl. Biomed. Eng. 2009, 2, 39–43. [Google Scholar]
- Haig, A.; Sanderson, R.; Mudge, P.; Balachandran, W. Macro-fibre composite actuators for the transduction of Lamb and horizontal shear ultrasonic guided waves. Insight-Non-Destr. Test. Cond. Monit. 2013, 55, 72–77. [Google Scholar] [CrossRef]
- Lowe, P.S.; Scholehwar, T.; Yau, J.; Kanfoud, J.; Gan, T.-H.; Selcuk, C. Flexible Shear Mode Transducer for Structural Health Monitoring using Ultrasonic Guided Waves. IEEE Trans. Ind. Inform. 2017, PP. [Google Scholar] [CrossRef]
- Conjusteau, A.; Ermilov, S.; Su, R.; Brecht, H.; Fronheiser, M.; Oraevsky, A. Measurement of the spectral directivity of optoacoustic and ultrasonic transducers with a laser ultrasonic source. Rev. Sci. Instrum. 2009, 80, 093708. [Google Scholar] [CrossRef] [PubMed]
- Wang, H.; Wang, X.; He, C.; Xue, C. Design and Performance Analysis of Capacitive Micromachined Ultrasonic Transducer Linear Array. Micromachines 2014, 5, 420–431. [Google Scholar] [CrossRef]
- Tiwari, K.A.; Raisutis, R.; Mazeika, L.; Samaitis, V. Development of a 2D analytical model for the prediction of directivity pattern of transducers in the generation of guided wave modes. Procedia Struct. Integr. 2017, 5, 973–980. [Google Scholar] [CrossRef]
- Jenkins, F.A.; Watson, W.W. Huygens’ principle. Access Sci. 2014. [Google Scholar] [CrossRef]
- Coleman, C. Huygen’s principle applied to radio wave propagation. Radio Sci. 2002, 37. [Google Scholar] [CrossRef]
- Pavlakovic, B.N.; Lowe, M.; Alleyne, D.; Cawley, P. Disperse: A general purpose program for creating dispersion curves. In Annual Review of Progress in Quantitative NDE; Thompson, D.O., Chimenti, D.E., Eds.; Plenum Press: New York, NY, USA, 1997; pp. 185–192. [Google Scholar] [CrossRef]
- He, P. Simulation of ultrasound pulse propagation in lossy media obeying a frequency power law. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 1998, 45, 114–125. [Google Scholar] [CrossRef] [PubMed]
- Morin, D. Interferance and Diffraction. In Waves; Harvard University Press: Cambridge, MA, USA, 2010; Chapter 9; pp. 1–38. Available online: www.people.fas.harvard.edu/~djmorin/waves/interference.pdf (accessed on 27 March 2016).
- Macro Fiber Composite (MFC). Available online: http://www.smart-material.com/MFC-product-main.html (accessed on 20 March 2017).
- Wilkie, W.K.; Bryant, R.G.; High, J.W.; Fox, R.L.; Hellbaum, R.F.; Jalink, A.; Little, B.D.; Mirick, P.H. Low-cost piezocomposite actuator for structural control applications. In Smart Structures and Materials 2000: Industrial and Commercial Applications of Smart Structures Technologies; International Society for Optics and Photonics: Bellingham, WA, USA, 2000; Volume 3991, pp. 323–335. [Google Scholar] [CrossRef]
- Ren, G.; Jhang, K. Application of Macrofiber Composite for Smart Transducer of Lamb Wave Inspection. Adv. Mater. Sci. Eng. 2013, 2013, 281575. [Google Scholar] [CrossRef]
- Su, Z.; Ye, L.; Lu, Y. Guided Lamb waves for identification of damage in composite structures: A review. J. Sound Vib. 2006, 295, 753–780. [Google Scholar] [CrossRef]
- Rose, J. Ultrasonic Waves in Solid Media; Cambridge University Press: Cambridge, UK, 2014; pp. 76–287. ISBN 9781107273610. [Google Scholar]
- Samaitis, V.; Mažeika, L. Influence of the Spatial Dimensions of Ultrasonic Transducers on the Frequency Spectrum of Guided Waves. Sensors 2017, 17, 1825. [Google Scholar] [CrossRef] [PubMed]
- Alleyne, D.; Cawley, P. A two-dimensional Fourier transform method for the measurement of propagating multimode signals. J. Acoust. Soc. Am. 1991, 89, 1159–1168. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Quantity | Numerical Value |
|---|---|---|
| E | Young’s modulus | 71 GPa |
| ρ | Density | 2780 kg m−3 |
| υ | Poisson’s ratio | 0.33 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tiwari, K.A.; Raisutis, R.; Mazeika, L.; Samaitis, V. 2D Analytical Model for the Directivity Prediction of Ultrasonic Contact Type Transducers in the Generation of Guided Waves. Sensors 2018, 18, 987. https://doi.org/10.3390/s18040987
Tiwari KA, Raisutis R, Mazeika L, Samaitis V. 2D Analytical Model for the Directivity Prediction of Ultrasonic Contact Type Transducers in the Generation of Guided Waves. Sensors. 2018; 18(4):987. https://doi.org/10.3390/s18040987
Chicago/Turabian StyleTiwari, Kumar Anubhav, Renaldas Raisutis, Liudas Mazeika, and Vykintas Samaitis. 2018. "2D Analytical Model for the Directivity Prediction of Ultrasonic Contact Type Transducers in the Generation of Guided Waves" Sensors 18, no. 4: 987. https://doi.org/10.3390/s18040987
APA StyleTiwari, K. A., Raisutis, R., Mazeika, L., & Samaitis, V. (2018). 2D Analytical Model for the Directivity Prediction of Ultrasonic Contact Type Transducers in the Generation of Guided Waves. Sensors, 18(4), 987. https://doi.org/10.3390/s18040987