An INS/WiFi Indoor Localization System Based on the Weighted Least Squares


Abstract
:1. Introduction
- (1)
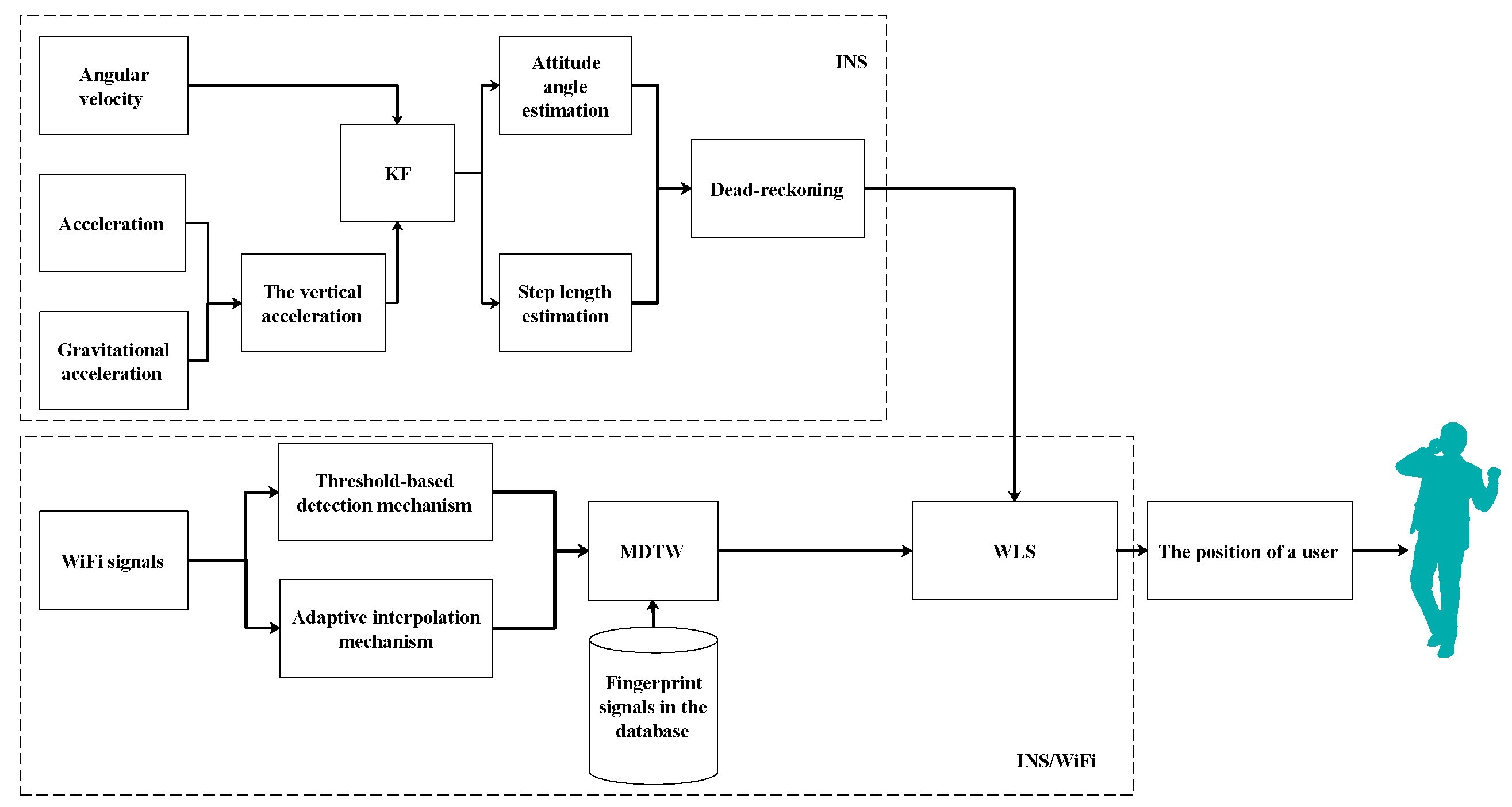
- To improve the quality of unprocessed signals from smartphones, pre-processing mechanisms, including a threshold-based detection mechanism and an adaptive interpolation mechanism, are developed . When signal strength is lower than a predefined threshold, a threshold-based detection mechanism removes the unreliable signals. An adaptive interpolation mechanism automatically inserts different wireless signals according to the sampling frequency of the smartphone.
- (2)
- We adopt the sequence matching method, which is different from the point-to-point fingerprint matching method. To deal with multi-dimensional signals, we propose a MDTW method based on the traditional DTW. Considering the relationship between the MDTW distance and positioning error, we propose a MDTW-based WLS to reduce position error and improve robustness.
- (3)
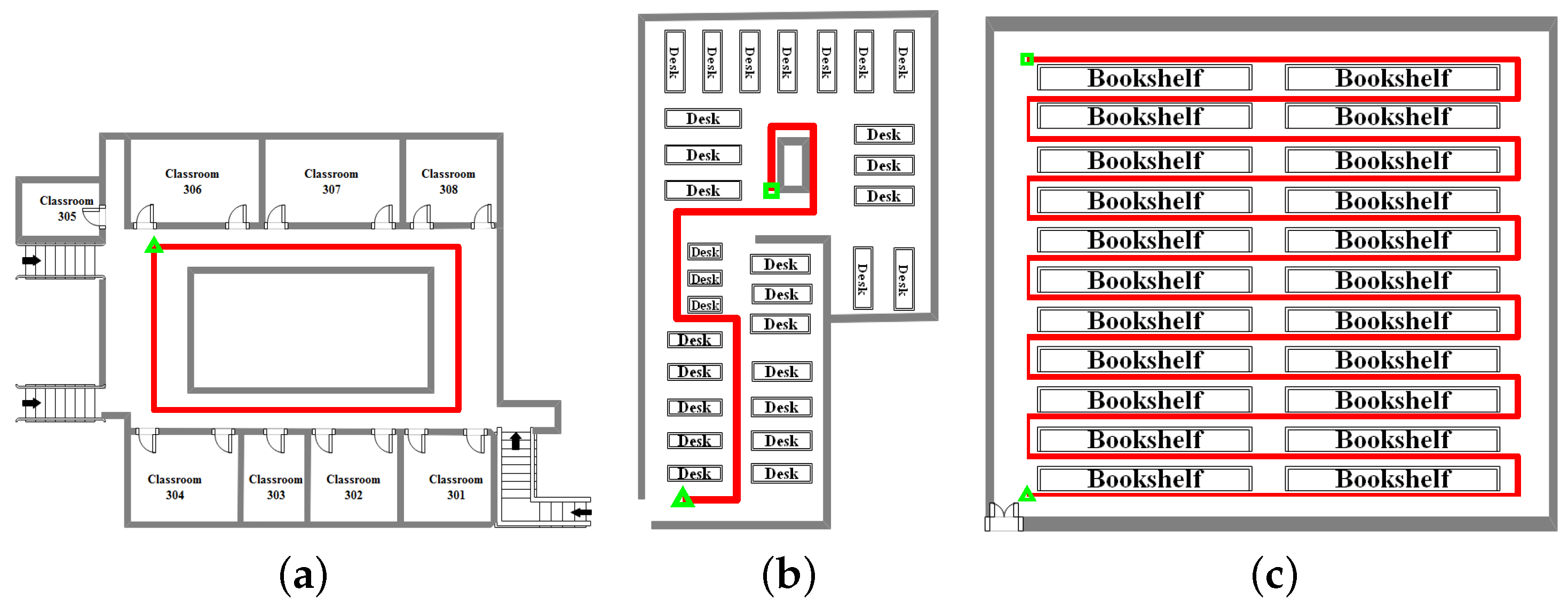
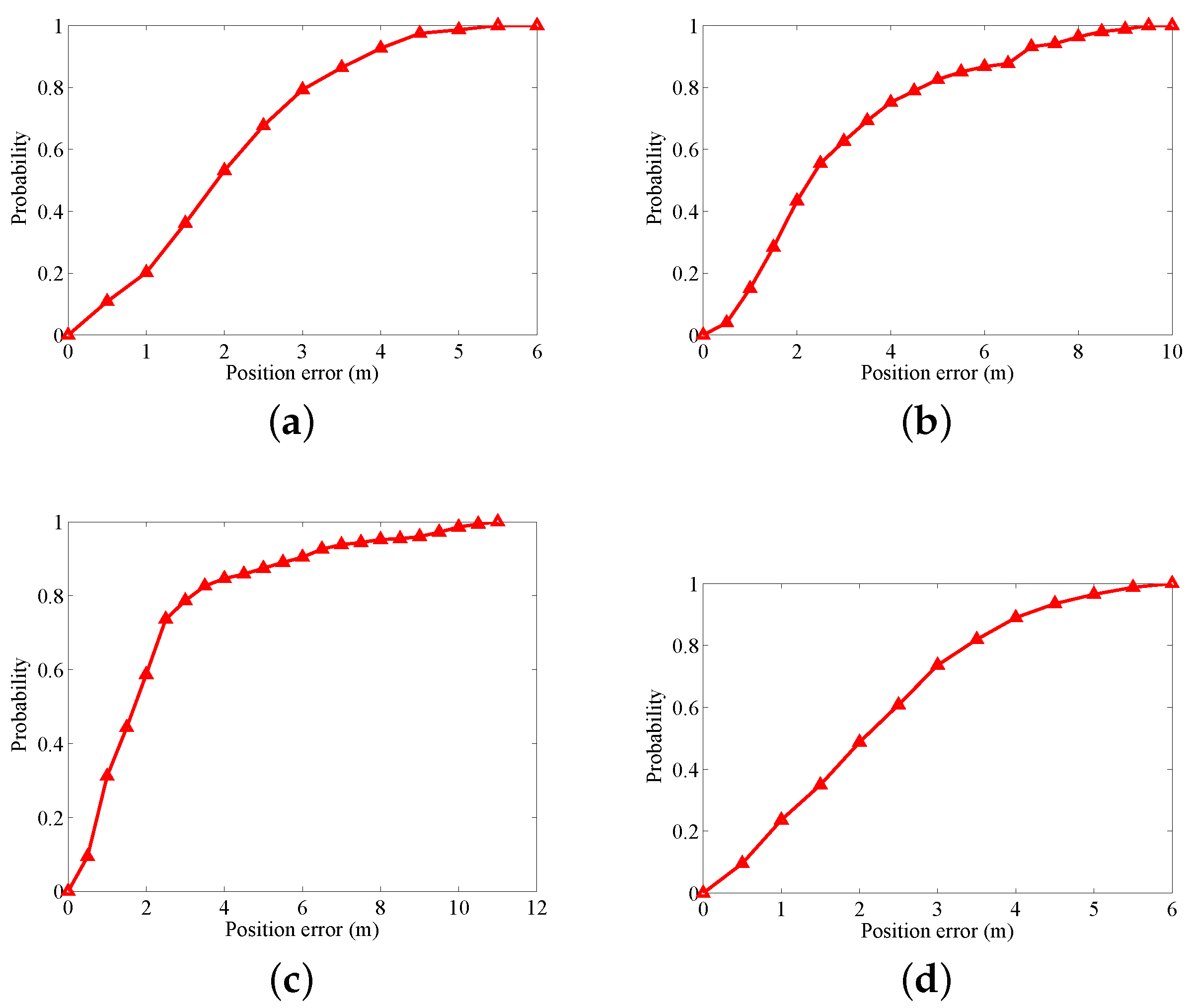
- Using calling, dangling, handheld and pocket motion gestures, we performed experiments in three scenarios at a local university. Experimental results reveal a positioning accuracy of 2.03 m.
2. Related Work
3. System Model
3.1. INS
| Algorithm 1: INS |
| Input: Raw readings from MEMS accelerometers and gyros 1. Calculate the vertical acceleration by Equation (6). 2. Detect vertical zero velocity point. 3. Loop INS 4. Compensate the IMU measurements with the current estimates of the sensor errors. 5. Update the quaternion. 6. Get attitude of the navigation system using the update quaternion. 7. Update the position and velocity estimates. 8. Use Kalman filter to estimate the zero velocity when a vertical zero velocity is checked. 9. End INS 10. Calculate attitude angle by Equation (5) and step length by Equation (8). 11. Calculate a user’s position using dead-reckoning. |
3.1.1. Attitude Angle Estimation Model
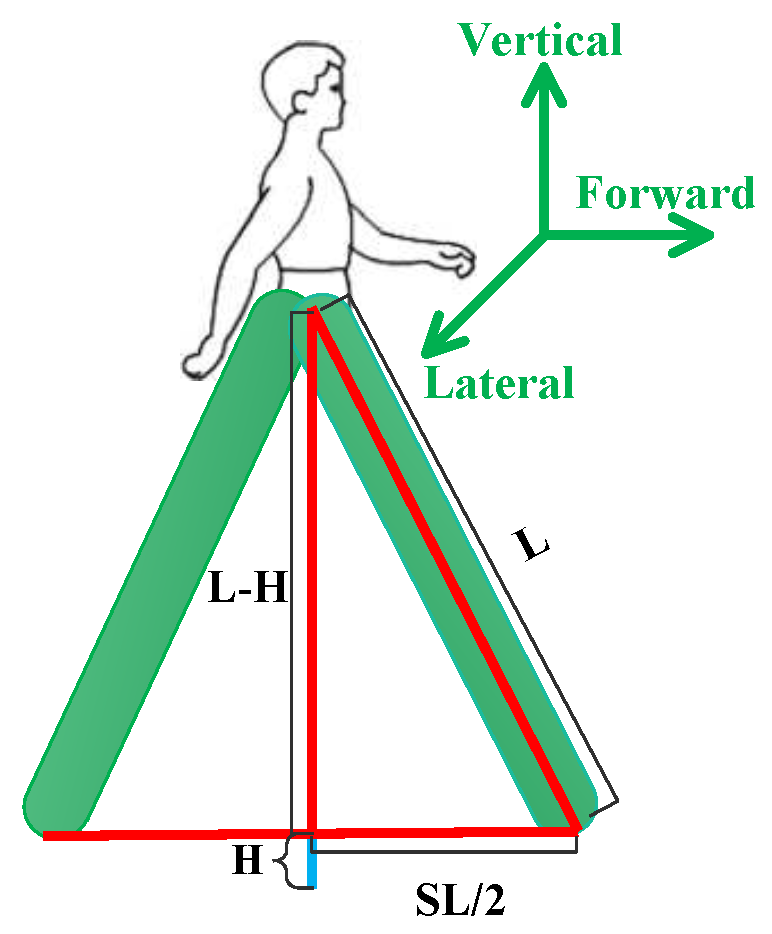
3.1.2. Step Length Model
3.1.3. Dead-Reckoning Position
3.2. INS/WiFi Hybrid System
3.2.1. Pre-Processing Mechanisms
3.2.2. MDTW-Based WLS
| Algorithm 2: MDTW |
| Input: The measured signal with length n and fingerprint signal with length m. 1. Let denote the distance among pairs of values in and . 2. for i = 1 to n do 3. for j = 1 to m do 4. Normalize each dimension of and separately. 5. = . 6. End for 7.End for 8.Let denote MDTW fingerprint distance from and . 9.=. 10. for i = 2 to n do 11. = + . 12. for j = 2 to m do 13. = + . 14. = + min([. 15. End for 16.End for 17.Output: The MDTW distance . |
4. Experiments and Discussions
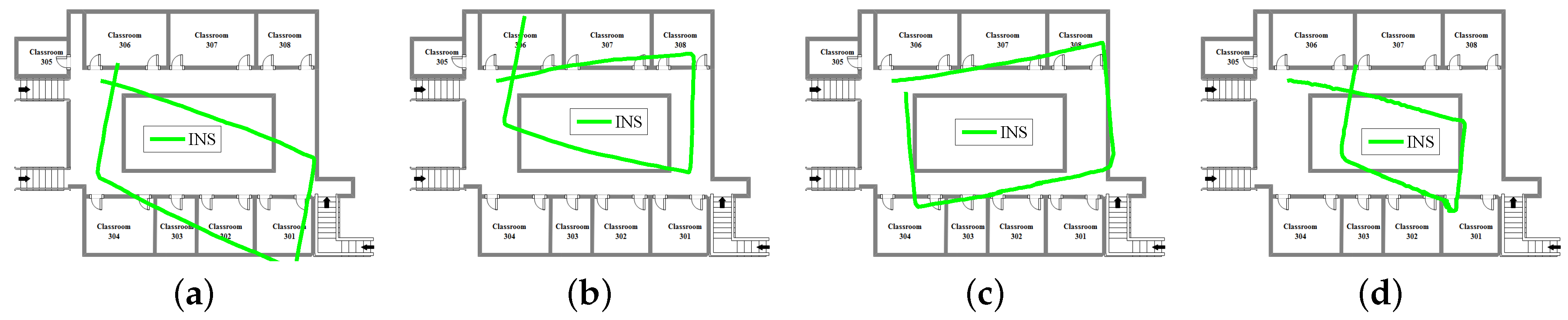
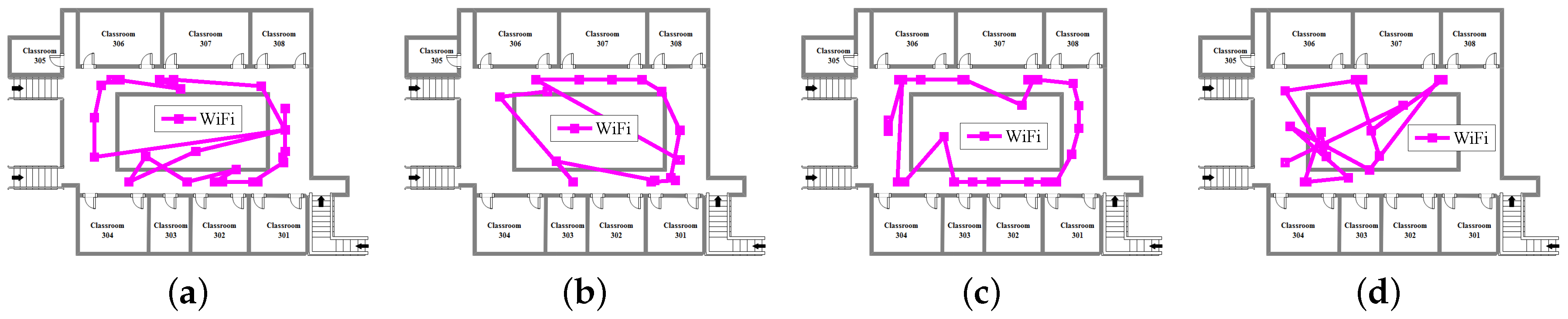
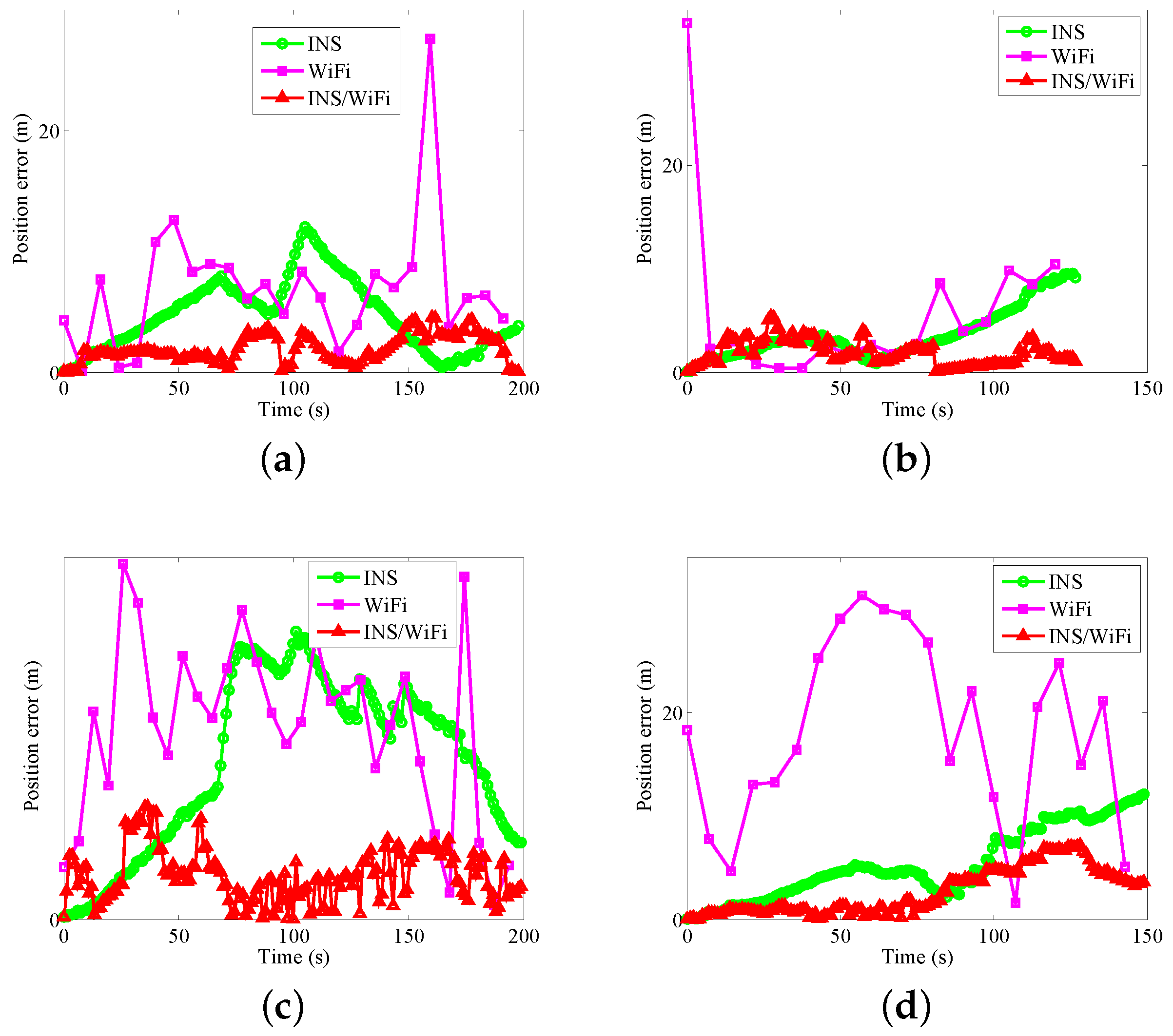
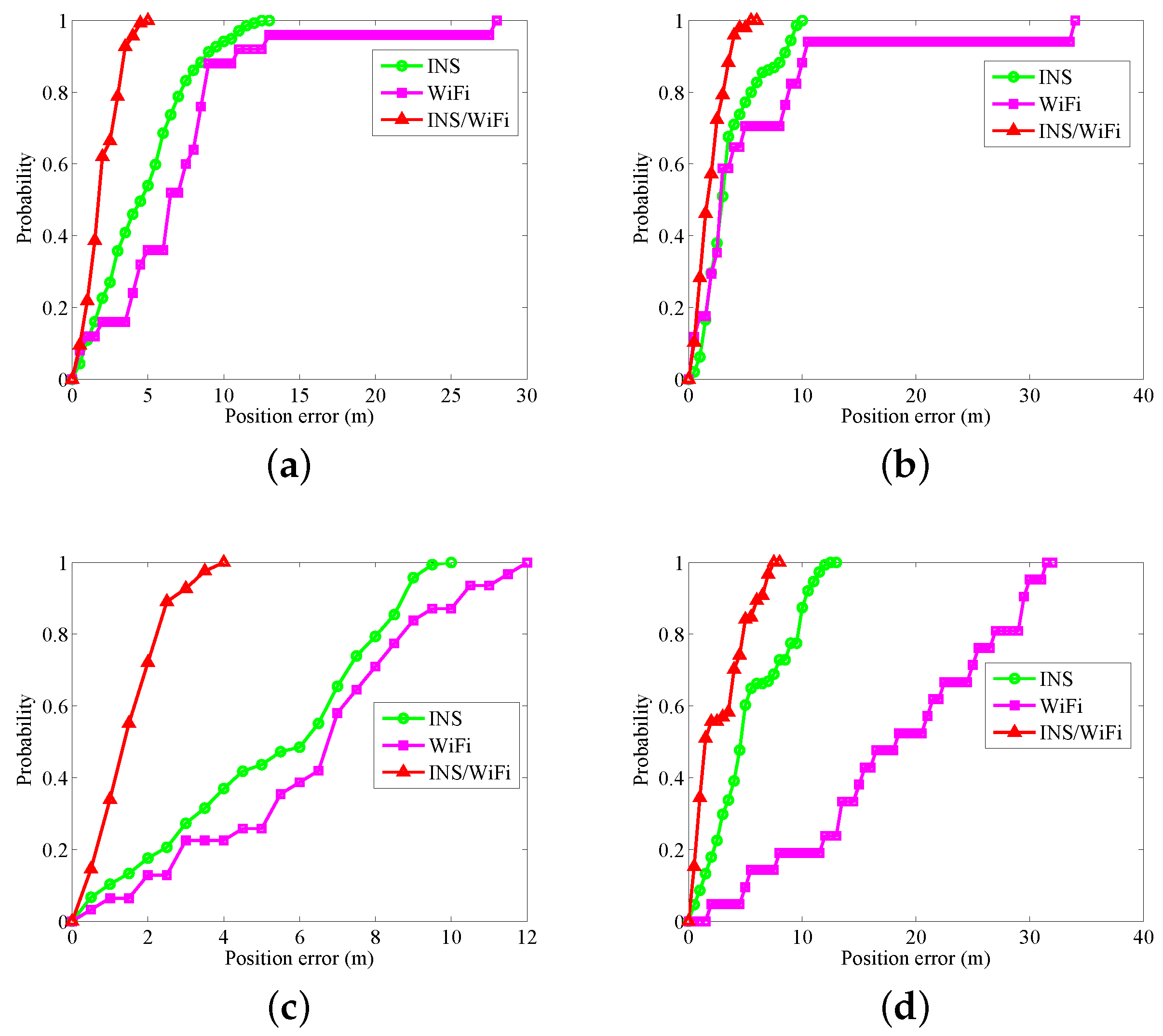
4.1. Corridor Walking Experiment
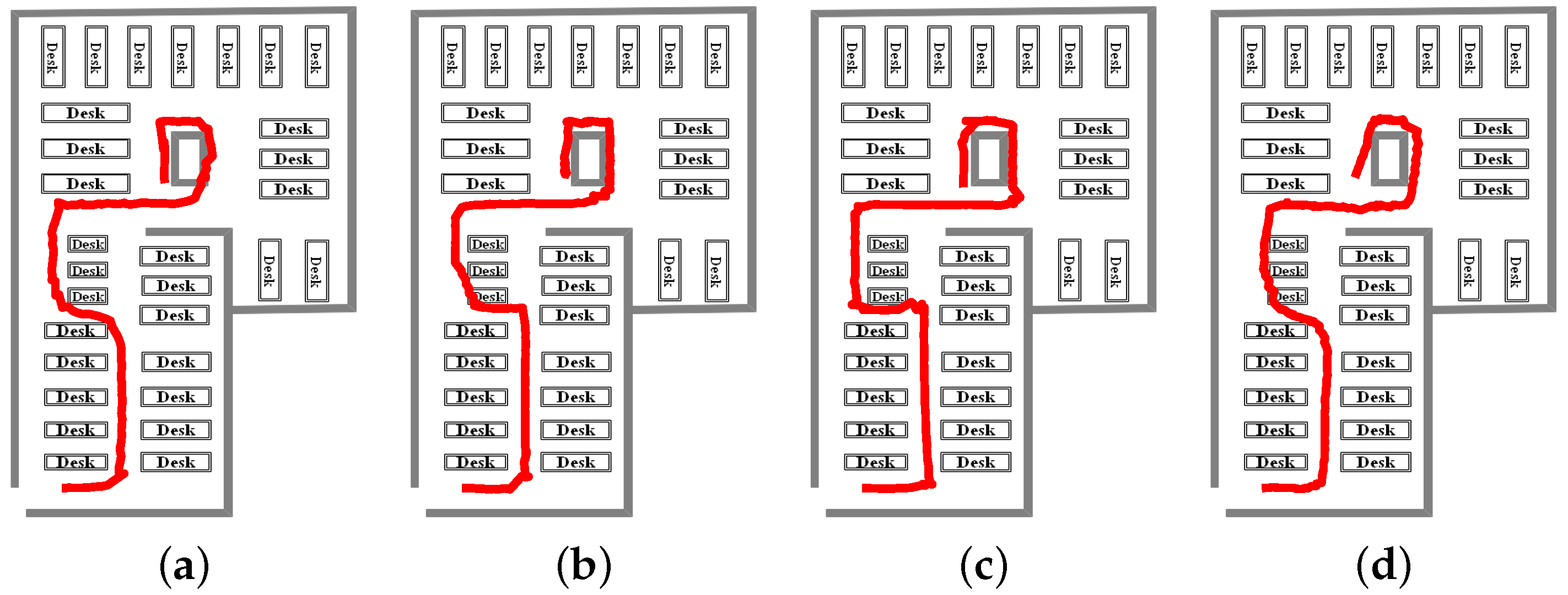
4.2. Study Room Walking Experiment
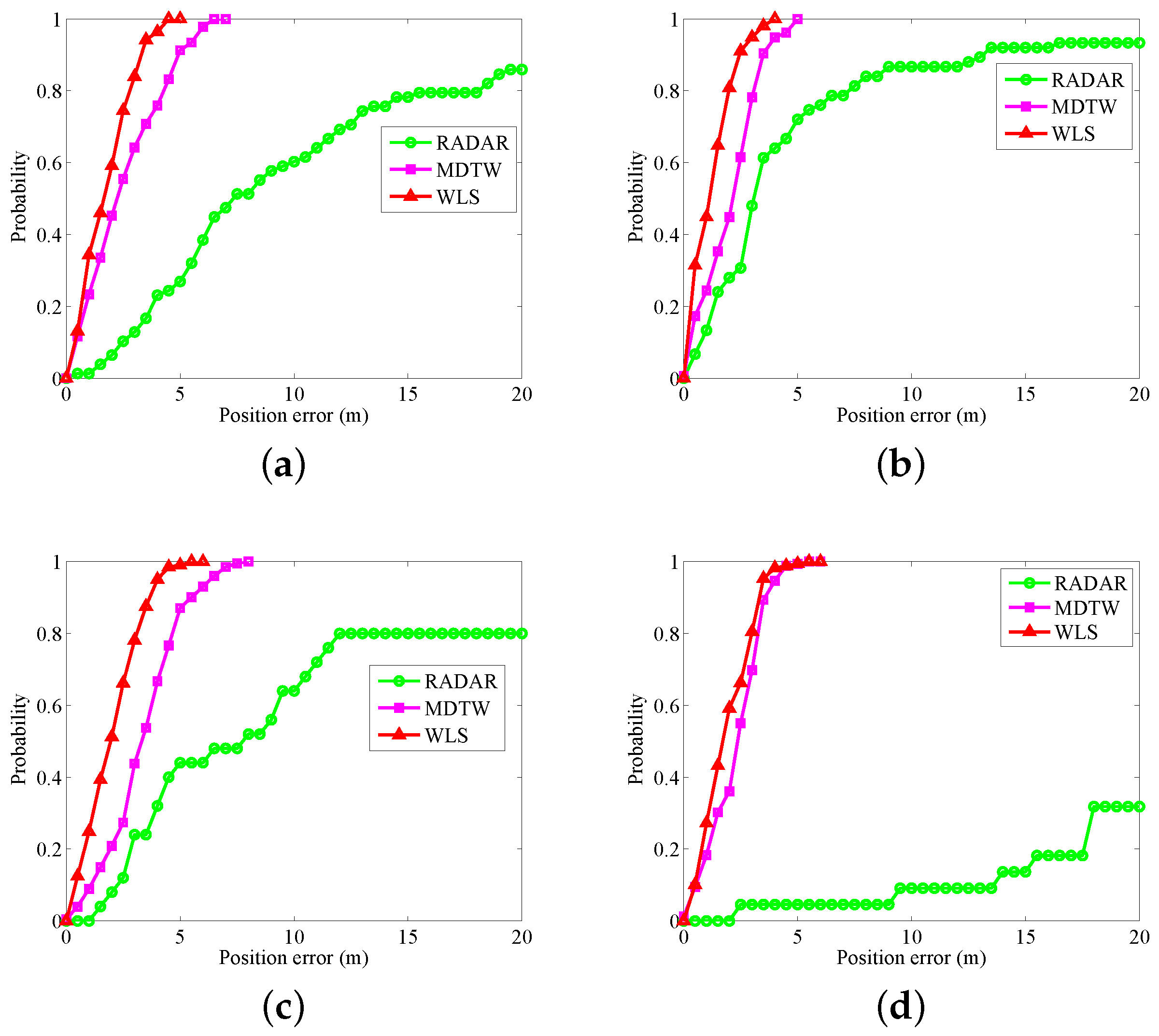
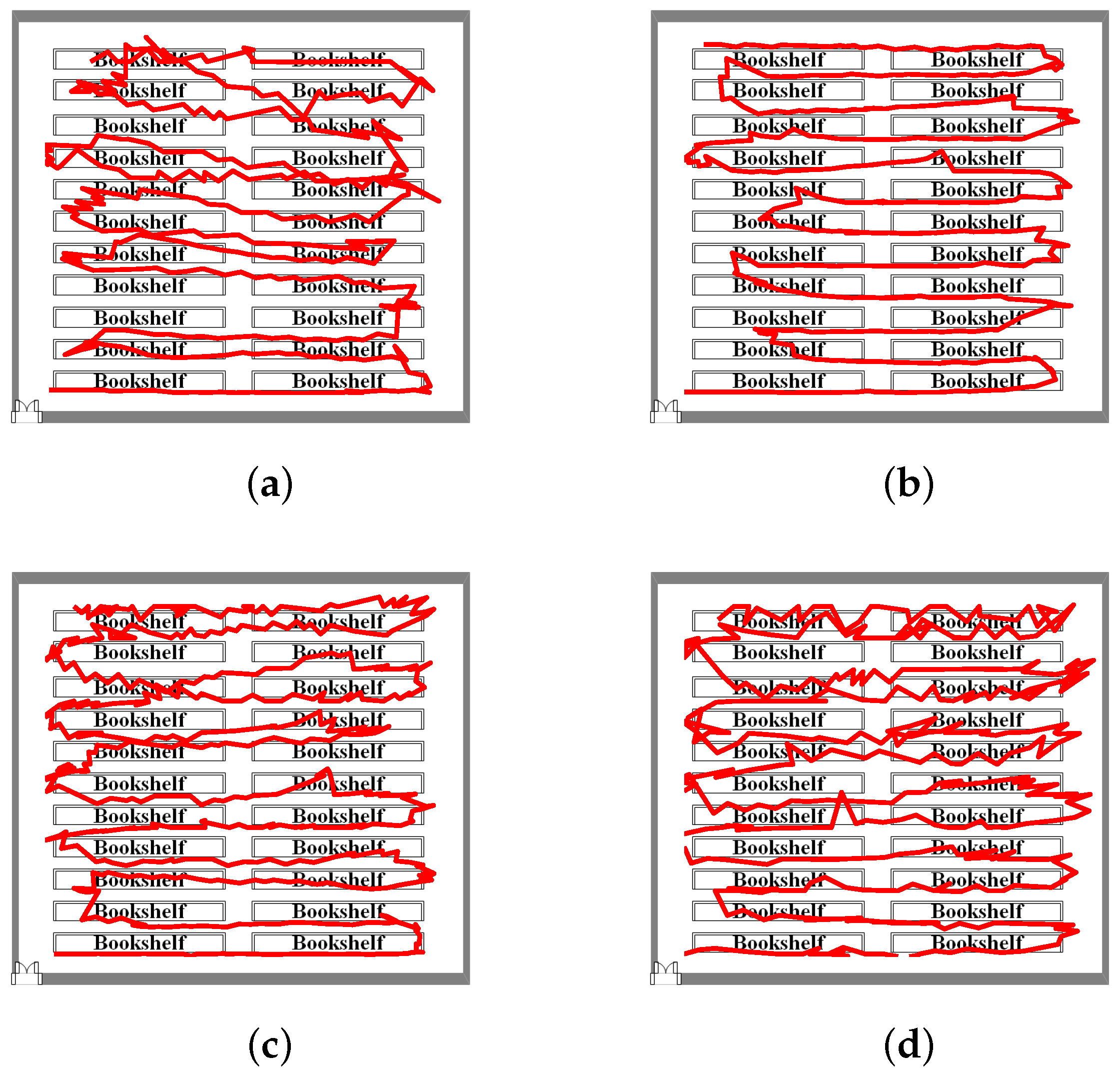
4.3. Library Stack Room Walking Experiment
5. Conclusions and Future Work
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| INS | Inertial Navigation System |
| MDTW | Multi-dimensional Dynamic Time Warping |
| WLS | Weighted Least Squares |
| GPS | Global Positioning System |
| BDS | Beidou Navigation Satellite System |
| MEMS | Micro-Electro-Mechanical System |
| APs | Access Points |
| RSS | Received Signal Strength |
| DTW | Dynamic Time Warping |
| HDE | Heuristic Drift Elimination |
| EKF | Extended Kalman Filter |
| APF | Auxiliary Particle Filter |
| KF | Kalman Filter |
| DR | Dead-Reckoning |
| MM | Magnetic Matching |
| DCM | Direction Cosine Matrix |
| CDF | Cumulative Distribution Function |
| REMS | Root Mean Square Error |
| CEP | Circular Error Probability |
References
- Park, S.K.; Suh, Y.S. A zero velocity detection algorithm using inertial sensors for pedestrian navigation systems. Sensors 2010, 10, 9163–9178. [Google Scholar] [CrossRef] [PubMed]
- Gu, F.Q.; Khoshelham, K.; Shang, J.G.; Yu, F.W.; Wei, Z. Robust and Accurate Smartphone-Based Step Counting for Indoor Localization. IEEE Sens. J. 2017, 17, 3453–3460. [Google Scholar] [CrossRef]
- Peng, A.; Zheng, L.X.; Zhou, W.C.; Yan, C.H.; Wang, Y.Z.; Ruan, X.Y.; Tang, B.Y. Foot-mounted Indoor Pedestrian Positioning System Based on Low-Cost Inertial Senors. In Proceedings of the 2016 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Alcalá de Henares, Spain, 4–7 October 2016; pp. 4–7. [Google Scholar]
- Chen, P.; Kuang, Y.; Chen, X. A UWB/improved PDR integration algorithm applied to dynamic indoor positioning for pedestrians. Sensors 2017, 17, 2065. [Google Scholar] [CrossRef] [PubMed]
- Bargshady, N.; Garza, G.; Pahlavan, K. Precise Tracking of Things via Hybrid 3-D Fingerprint Database and Kernel Method Particle Filter. IEEE Sens. J. 2016, 16, 8963–8971. [Google Scholar] [CrossRef]
- Wang, G.; Chen, H.; Li, Y.; Jin, M. On received-signal-strength based localization with unknown transmit power and path loss exponent. IEEE Wirel. Commun. Lett. 2012, 16, 536–539. [Google Scholar] [CrossRef]
- Huang, Q.; Zhang, Y.; Ge, Z.; Lu, C. Refining Wi-Fi based indoor localization with Li-Fi assisted model calibration in smart buildings. In Proceedings of the 2016 International Conference on Computing in Civil and Building Engineering, Osaka, Japan, 6–8 July 2016; pp. 1–8. [Google Scholar]
- Cong, L.; Zhuang, W.H. Hybrid TDOA/AOA mobile user location for wideband CDMA cellular systems. IEEE Trans. Wirel. Commun. 2002, 1, 439–447. [Google Scholar] [CrossRef]
- Niculescu, D.; Nath, B. Ad hoc positioning system (APS) using AOA. In Proceedings of the INFOCOM 2003. Twenty-Second Annual Joint Conference of the IEEE Computer and Communications, San Francisco, CA, USA, 30 March–3 April 2003; pp. 1734–1743. [Google Scholar]
- Youssef, M.; Youssef, A.; Rieger, C.; Shankar, U.; Agrawala, A. An asynchronous time-based location determination system. In Proceedings of the 4th International Conference on Mobile Systems, Applications and Services, Uppsala, Sweden, 19–12 June 2006; pp. 165–176. [Google Scholar]
- Bose, A.; Foh, C.H. A practical path loss model for indoor WiFi positioning enhancement. In Proceedings of the 2007 6th International Conference on Information, Communications & Signal Processing, Singapore, 10–13 December 2007; pp. 1–5. [Google Scholar]
- Van, M.N.; Tuan, N.V.; Son, T.T.; Le-Minh, H.; Burton, A. Weighted k-nearest neighbour model for indoor VLC positioning. IET Commun. 2017, 11, 864–871. [Google Scholar] [CrossRef]
- Zheng, L.X.; Wu, Z.H.; Zhou, W.C.; Weng, S.L.; Zheng, H.R. A Smartphone Based Hand-Held Indoor Positioning System. In Frontier Computing; Springer: Singapore, 2016; pp. 639–650. [Google Scholar]
- Zheng, L.X.; Zhou, W.C.; Tang, W.W.; Zheng, X.C.; Peng, A.; Zheng, H.R. A 3D indoor positioning system based on low-cost MEMS sensors. Simul. Model. Pract. Theory 2016, 65, 45–56. [Google Scholar] [CrossRef]
- Borenstein, J.; Ojeda, L. Heuristic drift elimination for personnel tracking systems. J. Navigation 2010, 63, 591–606. [Google Scholar] [CrossRef]
- Yu, C.Y.; El-Sheimy, N.; Lan, H.Y.; Liu, Z.B. Map-Based Indoor Pedestrian Navigation Using an Auxiliary Particle Filter. Micromachines 2017, 8, 225. [Google Scholar] [CrossRef]
- Bahl, P.; Padmanabhan, V.N. RADAR: An in-building RF-based user location and tracking system. In Proceedings of the Nineteenth Annual Joint Conference of the IEEE Computer and Communications Societies, Tel Aviv, Israel, 26–30 March 2000; pp. 775–784. [Google Scholar]
- Li, Y.; Zhuang, Y.; Lan, H.Y.; Zhang, P.; Niu, X.J.; El-Sheimy, N. WiFi-aided magnetic matching for indoor navigation with consumer portable devices. Micromachines 2015, 6, 747–764. [Google Scholar] [CrossRef]
- Li, Y.; Zhuang, Y.; Zhang, P.; Lan, H.Y.; Niu, X.J.; El-Sheimy, N. An improved inertial/wifi/magnetic fusion structure for indoor navigation. Inf. Fusion 2017, 34, 101–119. [Google Scholar] [CrossRef]
- Hernández, N.; Ocaña, M.; Alonso, J.M.; Kim, E. Continuous space estimation: Increasing WiFi-based indoor localization resolution without increasing the site-survey effort. Sensors 2017, 17, 147. [Google Scholar] [CrossRef] [PubMed]
- Yu, C.; Lan, H.; Gu, F.; Yu, F.; El-Sheimy, N. A Map/INS/Wi-Fi Integrated System for Indoor Location-Based Service Applications. Sensors 2017, 17, 1272. [Google Scholar] [CrossRef] [PubMed]
- Zhuang, Y.; Li, Y.; Lan, H.Y.; Syed, Z.; El-Sheimy, N. Wireless access point localization using nonlinear least squares and multi-level quality control. IEEE Wirel. Commun. Lett. 2015, 4, 693–696. [Google Scholar] [CrossRef]
- Tian, Y.; Shigaki, D.; Wang, W.; Ahn, C.J. A weighted least-squares method using received signal strength measurements for WLAN indoor positioning system. In Proceedings of the 2017 20th International Symposium on Wireless Personal Multimedia Communications (WPMC), Bali, Indonesia, 17–20 December 2017; pp. 310–314. [Google Scholar]
- Deng, Z.A.; Wang, G.F.; Hu, Y.; Wu, D. Heading estimation for indoor pedestrian navigation using a smartphone in the pocket. Sensors 2015, 15, 21518–21536. [Google Scholar] [CrossRef] [PubMed]
- Deng, Z.A. Estimation Techniques for Low-Cost Inertial Navigation. Ph.D. Thesis, University of Calgary, Calgary, AB, Canada, 2005. [Google Scholar]
- Shin, S.H.; Park, C.G.; Kim, J.W.; Hong, H.S.; Lee, J.M. Self-contained indoor positioning on off-the-shelf mobile devices. In Proceedings of the 2007 Sensors Applications Symposium, San Diego, CA, USA, 6–8 February 2007; pp. 1–5. [Google Scholar]
- Zhang, H.; Yuan, W.; Shen, Q.; Li, T.; Chang, H.L. A handheld inertial pedestrian navigation system with accurate step modes and device poses recognition. IEEE Sens. J. 2015, 15, 1421–1429. [Google Scholar] [CrossRef]
- Gusenbauer, D.; Isert, C.; Krösche, J. Self-contained indoor positioning on off-the-shelf mobile devices. In Proceedings of the 2010 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Zurich, Switzerland, 15–17 September 2010; pp. 1–9. [Google Scholar]
- Papoutsakis, K.; Panagiotakis, C.; Argyros, A.A. Temporal Action Co-segmentation in 3D Motion Capture Data and Videos. In Proceedings of the 2017 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Honolulu, HI, USA, 21–26 July 2017; pp. 6827–6836. [Google Scholar]
- Raffel, C.; Ellis, D.P. Optimizing DTW-based audio-to-MIDI alignment and matching. In Proceedings of the 2016 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Shanghai, China, 20–25 March 2016; pp. 81–85. [Google Scholar]
- Cheng, L.; Wang, Y.; Zhong, L.; Du, P.; Li, M. Technical framework of feature extraction based on pixel-level SAR image time series. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2015, 8, 1665–1681. [Google Scholar] [CrossRef]
- Alvarez, A.G.; Evin, D.A.; Verrastro, S. Implementation of a Speech Recognition System in a DSC. IEEE Lat. Am. Trans. 2016, 14, 2657–2662. [Google Scholar] [CrossRef]
- Subbu, K.P.; Gozick, B.; Dantu, R. Indoor localization through dynamic time warping. In Proceedings of the 2011 IEEE International Conference on Systems, Man, and Cybernetics (SMC), Anchorage, AK, USA, 9–12 October 2011; pp. 1639–1644. [Google Scholar]
- Shu, Y.C.; Bo, C.; Shen, G.B.; Zhao, C.S.; Li, L.Q.; Zhao, F. Magicol: Indoor localization using pervasive magnetic field and opportunistic WiFi sensing. IEEE J. Sel. Areas Commun. 2015, 33, 1443–1457. [Google Scholar] [CrossRef]
- Ten Holt, G.A.; Reinders, M.J.; Hendriks, E.A. Multi-dimensional dynamic time warping for gesture recognition. In Proceedings of the Thirteenth annual Conference of the Advanced School for Computing and Imaging, Heijen, The Netherlands, 13–15 June 2007; pp. 1–8. [Google Scholar]
- Liu, H.; Darabi, H.; Banerjee, P.; Liu, J. Survey of wireless indoor positioning techniques and systems. IEEE Trans. Syst. Man Cybern. Part C (Appl. Rev.) 2007, 37, 1067–1080. [Google Scholar] [CrossRef]
- Simon, D.; Chia, T.L. Kalman filtering with state equality constraints. IEEE Trans. Aerosp. Electron. Syst. 2002, 38, 128–136. [Google Scholar] [CrossRef]
- ISO/IEC 18305:2016. Information Technology—Real Time Locating Systems—Test and Evaluation of Localization and Tracking Systems. Available online: https://www.iso.org/standard/62090.html (accessed on 4 May 2018).
- Li, Y.; Zhuang, Y.; Lan, H.Y.; Niu, X.J.; El-Sheimy, N. A Profile-Matching Method for Wireless Positioning. IEEE Commun. Lett. 2016, 20, 2514–2517. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Motion Gestures | Error | The Average Error | RMSE | Maximum Error | CEP (95%) |
|---|---|---|---|---|---|
| Calling | INS | 4.67 | 5.53 | 12.02 | 10.51 |
| WiFi | 6.94 | 8.69 | 27.62 | 12.68 | |
| INS/WiFi | 1.93 | 2.23 | 4.55 | 3.92 | |
| Dangling | INS | 3.61 | 4.36 | 9.54 | 9.08 |
| WiFi | 5.79 | 9.62 | 33.73 | 33.72 | |
| INS/WiFi | 1.88 | 2.23 | 5.41 | 3.86 | |
| Handheld | INS | 10.35 | 14.23 | 40.68 | 26.18 |
| WiFi | 6.33 | 7 | 11.78 | 11.35 | |
| INS/WiFi | 1.48 | 1.72 | 3.75 | 3.26 | |
| INS | 5.35 | 6.35 | 12.13 | 11.05 | |
| WiFi | 18.24 | 20.22 | 31.32 | 30 | |
| INS/WiFi | 2.68 | 3.47 | 7.21 | 6.87 | |
| General | INS | 4.72 | 5.55 | 10.81 | 9.9 |
| WiFi | 9.33 | 11.38 | 26.11 | 21.94 | |
| INS/WiFi | 1.99 | 2.41 | 5.23 | 4.48 |
| Motion Gestures | Error | The Average Error | RMSE | Maximum Error | CEP (95%) |
|---|---|---|---|---|---|
| Calling | RADAR | 10.58 | 13.63 | 34.52 | 32.41 |
| MDTW | 2.54 | 3.05 | 6.3 | 5.67 | |
| WLS | 1.74 | 2.05 | 4.37 | 3.82 | |
| Dangling | RADAR | 5.47 | 8.64 | 28.41 | 26.53 |
| MDTW | 2.05 | 2.38 | 4.96 | 4.04 | |
| WLS | 1.25 | 1.54 | 3.98 | 3.02 | |
| Handheld | RADAR | 10.35 | 14.23 | 40.68 | 26.18 |
| MDTW | 3.36 | 3.73 | 7.7 | 6.25 | |
| WLS | 1.97 | 2.31 | 5.4 | 4 | |
| RADAR | 27.44 | 29.97 | 50.81 | 46.09 | |
| MDTW | 2.23 | 2.51 | 5.08 | 4.02 | |
| WLS | 1.87 | 2.16 | 5.05 | 3.49 | |
| General | RADAR | 13.46 | 16.62 | 38.61 | 32.8 |
| MDTW | 2.55 | 2.92 | 6.01 | 5 | |
| WLS | 1.71 | 2.02 | 4.7 | 3.58 |
| Motion Gestures | Error | Person 1 | Person 2 | Person 3 | Person 4 | Person 5 | Person 6 |
|---|---|---|---|---|---|---|---|
| Calling | The average error | 2.05 | 2.23 | 3.2 | 1.75 | 2.28 | 3.62 |
| RMSE | 2.37 | 2.68 | 3.97 | 2.17 | 2.82 | 4.31 | |
| Maximum error | 5.21 | 6.38 | 10.01 | 5.41 | 6.88 | 9.48 | |
| Dangling | The average error | 2.98 | 6.74 | 1.88 | 4.65 | 4.8 | 3.58 |
| RMSE | 3.69 | 8.44 | 2.39 | 5.68 | 6.34 | 4.37 | |
| Maximum error | 9.46 | 20.22 | 6.79 | 11.52 | 15.22 | 10.89 | |
| Handheld | The average error | 2.35 | 3.41 | 4.04 | 3.89 | 4.54 | 3.81 |
| RMSE | 3.27 | 4.02 | 4.79 | 4.78 | 5.37 | 5.08 | |
| Maximum error | 10.7 | 8.44 | 11.64 | 11.93 | 10.59 | 15.04 | |
| The average error | 2.2 | 3.67 | 3.5 | 3.88 | 3.86 | 4.83 | |
| RMSE | 2.58 | 4.85 | 4.77 | 4.92 | 4.49 | 5.78 | |
| Maximum error | 5.95 | 12.92 | 15.62 | 14.23 | 10.43 | 13.8 | |
| General | The Average error | 2.4 | 4.01 | 3.16 | 3.54 | 3.87 | 3.96 |
| RMSE | 2.98 | 5 | 3.98 | 4.39 | 4.76 | 4.89 | |
| Maximum error | 7.83 | 11.99 | 11.02 | 10.77 | 10.78 | 12.3 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, J.; Ou, G.; Peng, A.; Zheng, L.; Shi, J. An INS/WiFi Indoor Localization System Based on the Weighted Least Squares. Sensors 2018, 18, 1458. https://doi.org/10.3390/s18051458
Chen J, Ou G, Peng A, Zheng L, Shi J. An INS/WiFi Indoor Localization System Based on the Weighted Least Squares. Sensors. 2018; 18(5):1458. https://doi.org/10.3390/s18051458
Chicago/Turabian StyleChen, Jian, Gang Ou, Ao Peng, Lingxiang Zheng, and Jianghong Shi. 2018. "An INS/WiFi Indoor Localization System Based on the Weighted Least Squares" Sensors 18, no. 5: 1458. https://doi.org/10.3390/s18051458
APA StyleChen, J., Ou, G., Peng, A., Zheng, L., & Shi, J. (2018). An INS/WiFi Indoor Localization System Based on the Weighted Least Squares. Sensors, 18(5), 1458. https://doi.org/10.3390/s18051458