1. Introduction
Because of their small size, reduced weight, and large transmission ratio advantages, planetary gear transmissions are widely used in large-scale complex mechanical systems under low speed and heavy load conditions [
1]. A planetary gear transmission is more complex compared with a gear transmission with fixed axes, and its vibration signal has more intense nonlinear and nonstationary characteristics due to the influences of different working conditions, different errors, transmission paths, and other factors [
2,
3]. Furthermore, heavy load machinery typically includes poor working conditions that cause strong noise interference in the process of vibration signal acquisition. These factors cause fault feature information to be obscured by noise during early stage planetary gear faults and increase the difficulty of fault feature extraction. The neglected faults continue to deteriorate and affect equipment operation safety. Therefore, studying a fault diagnosis method that can effectively extract and identify weak fault feature information of planetary gears is necessary.
The collected vibration signal typically contains a significant amount of interference information due to ambient noise and the complexity of the transmission system. In particular, early fault features are weak and basically submerged in noise [
4]. Directly diagnosing the original signal is difficult, and decomposition is required. Some classical mode decomposition methods based on recursion, such as empirical mode decomposition (EMD) or local mean decomposition (LMD), have been widely used in the fields of signal decomposition and feature extraction. EMD is a time-frequency analysis method used to adaptively decompose a nonlinear and nonstationary vibration signal into several strictly defined intrinsic mode functions (IMFs) [
5,
6]. However, end effect and modal aliasing are frequently observed in the EMD process, and the rigorous mathematical theory basis is insufficient [
7]. Although these problems are mitigated by subsequent improvements or new methods, they still exist. To add white noise to improve performance, hundreds of EMD or LMD operations must be repeated and the efficiency is reduced [
8,
9]. In addition, false components may appear. Variational mode decomposition (VMD) is a non-recursive signal decomposition method proposed by Dragomiretskiy et al. [
10]. By iteratively searching the optimal solution of variational model, the signal components are automatically decomposed in Fourier domain. Finally, modes and corresponding center frequencies are extracted [
11,
12].
Feature extraction is an important part of mechanical fault diagnosis [
13]. Its goal is to extract low-dimensional data that contains fault feature information from high-dimensional data. Although components of the original signal become clear after decomposition, each mode is nonstationary and its fault feature information remains weak [
14,
15]. Signal dimensions increase and simple analysis is insufficient; hence, further extraction is required. Singular value decomposition (SVD) is a method of matrix orthogonal decomposition. It can effectively reflect the features of a matrix because singular values are matrix intrinsic characteristics. SVD has been widely used in the field of fault detection and diagnosis because of its remarkable benefits in signal denoising and feature extraction under complex noise conditions [
16,
17]. Zhang et al. [
18] solved the problem of introducing a tight frame constraint into the popular dictionary learning model using a hard thresholding operation and SVD. Hence, a novel multiple feature recognition framework was established. Feng et al. [
19] exploited the highly flexible and adaptive characteristic of the shift-invariant K-means singular value decomposition (SI-K-SVD) dictionary learning method to extract the latent components of complex signals and suppress background noise. When using SVD to process gear vibration signals, the general approach involves constructing a Hankel matrix of the original signal or IMF containing main fault feature information, and then obtaining singular values by SVD to extract information or reconstruct the signal without noise [
20,
21]. In this process, weak fault feature information can be eliminated or lost, which can influence the accuracy of subsequent diagnosis. Therefore, determining a more comprehensive method of extraction and identification for early weak faults in strong noise is necessary. The idea of dividing and intercepting a part of data for local processing has been applied in many fields, including when considering planetary gear vibration signals. In this study, a method of extracting local fault feature information and then composing global feature is introduced. Different gear fault states are described by the distribution and variation in local features and detailed extraction of planetary gear vibration signals is realized.
After obtaining gear fault feature information using the partition feature extraction method, effective fault identification is required to achieve an accurate diagnosis. Many traditional classifiers, such as support vector machine (SVM) and back propagation (BP) neural networks, have been used by researchers [
22]. A variety of improved or new algorithms have been proposed or applied to the field of fault identification and classification, and have greatly improved the diagnostic accuracy [
23,
24]. However, many of these methods continue to experience difficulties when addressing large or multidimensional data samples [
25], or use fewer feature parameters as input samples, which is not conducive to accurate identification. Therefore, more efficient algorithms are still needed. Convolutional neural network (CNN) is an important depth-learning model that resolves the bottleneck of traditional neural networks [
26]. The structure model of a cat’s visual system was referenced during the CNN design process. Weight sharing is adopted to reduce computational complexity in the learning process and spatial correlation of the data is extracted using a local sensing area to significantly reduce the network parameters. Therefore, CNN is especially suitable for processing images or other multidimensional data, having high robustness to a certain degree of translation, scaling, and distortion [
27]. Chen et al. [
28] used two stacked CNNs to build a novel deep image saliency computing framework. The proposed framework highlights the objects of interest from complex background while preserving details. Levine et al. [
29] developed a method based on a partially observed guided policy search method and CNN, which was used to learn policies that map raw image observations directly to torques on the robot's motors. Google DeepMind used CNN as one of the core algorithms for AlphaGo [
30] and consecutively defeated several top chess players in the world, which demonstrates artificial intelligence transcending that of humans in the Go field. CNN can be used to directly process large data or multidimensional data samples, which is beneficial for more detailed local feature extraction and retaining the relative relationship of multidimensional data, leading to the acquisition of improved identification results.
In this paper, a novel method for fault feature extraction and diagnosis of planetary gears is proposed. Based on VMD and SVD, feature information is extracted in detail by partition processing, and fault classification is achieved using CNN. The remainder of this paper is composed as follows: In
Section 2, the mathematical model of partition fault feature information extraction of planetary gears based on VMD and SVD is established. In
Section 3, under different fault conditions, the vibration signal of a two-stage planetary gear of the drivetrain dynamics simulator (DDS) bench is measured using vibration acceleration sensors. In
Section 4, the collected vibration signal is decomposed by VMD and the obtained IMFs are constructed into IMF matrices. The partition scales are defined and each IMF matrix is divided to submatrices. The singular value vectors of the submatrices are obtained using SVD and singular value vector matrices of the corresponding fault states are constructed. Finally, the singular value vector matrices containing main fault feature information are used as inputs to train and test the CNN. Then, the identification and classification of planetary gear faults is achieved. The experimental results confirm that the fault state of the planetary gears can be accurately distinguished using the proposed method. In
Section 5, the performed gear degradation experiment is outlined. Different degradation states were identified effectively, and the effectiveness and the potential of proposed method are further verified. In the last section, conclusions are summarized.
4. Experimental Analysis
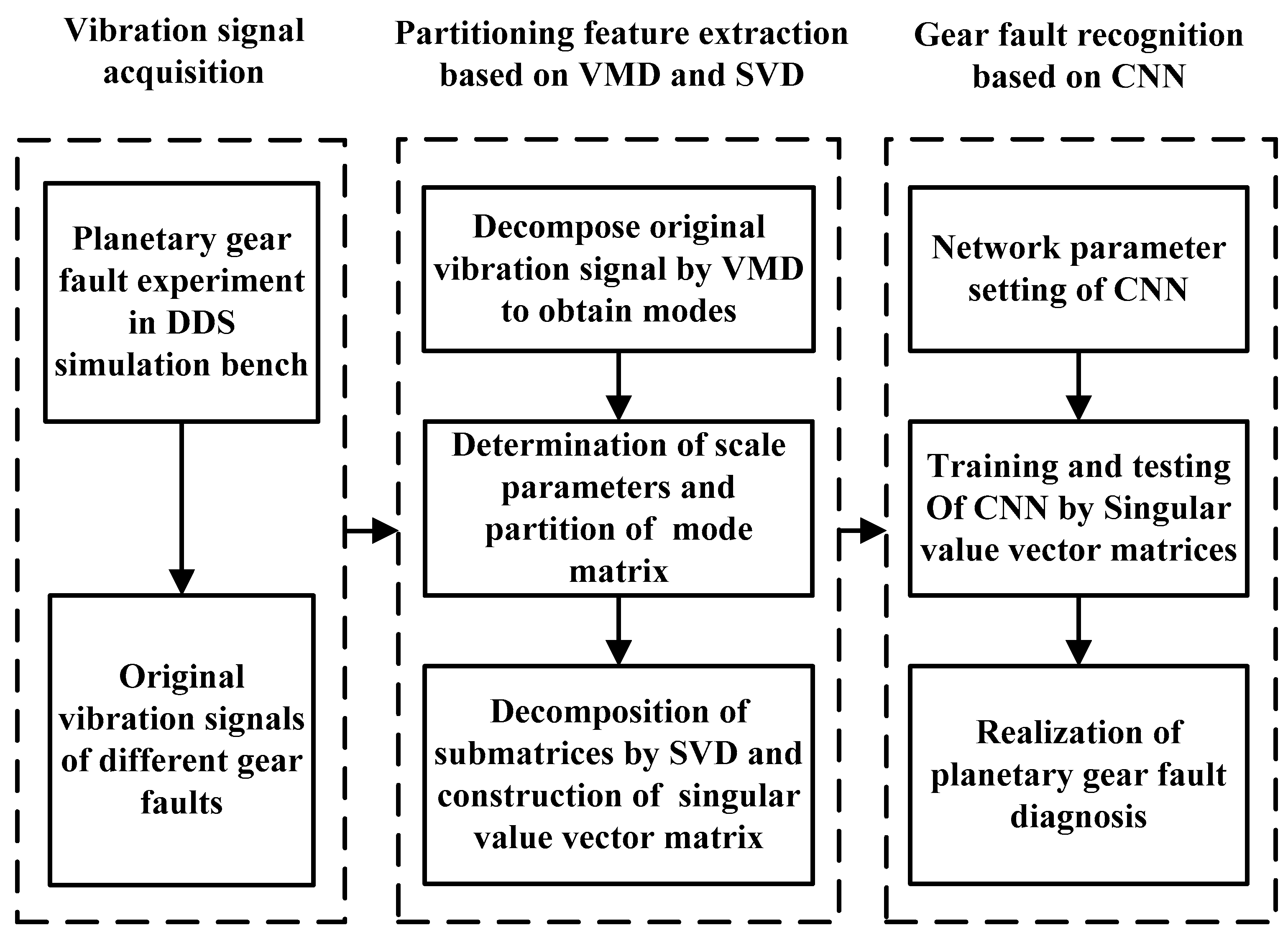
The experimental analysis flowchart of the proposed method for fault feature extraction and diagnosis of planetary gears is displayed in
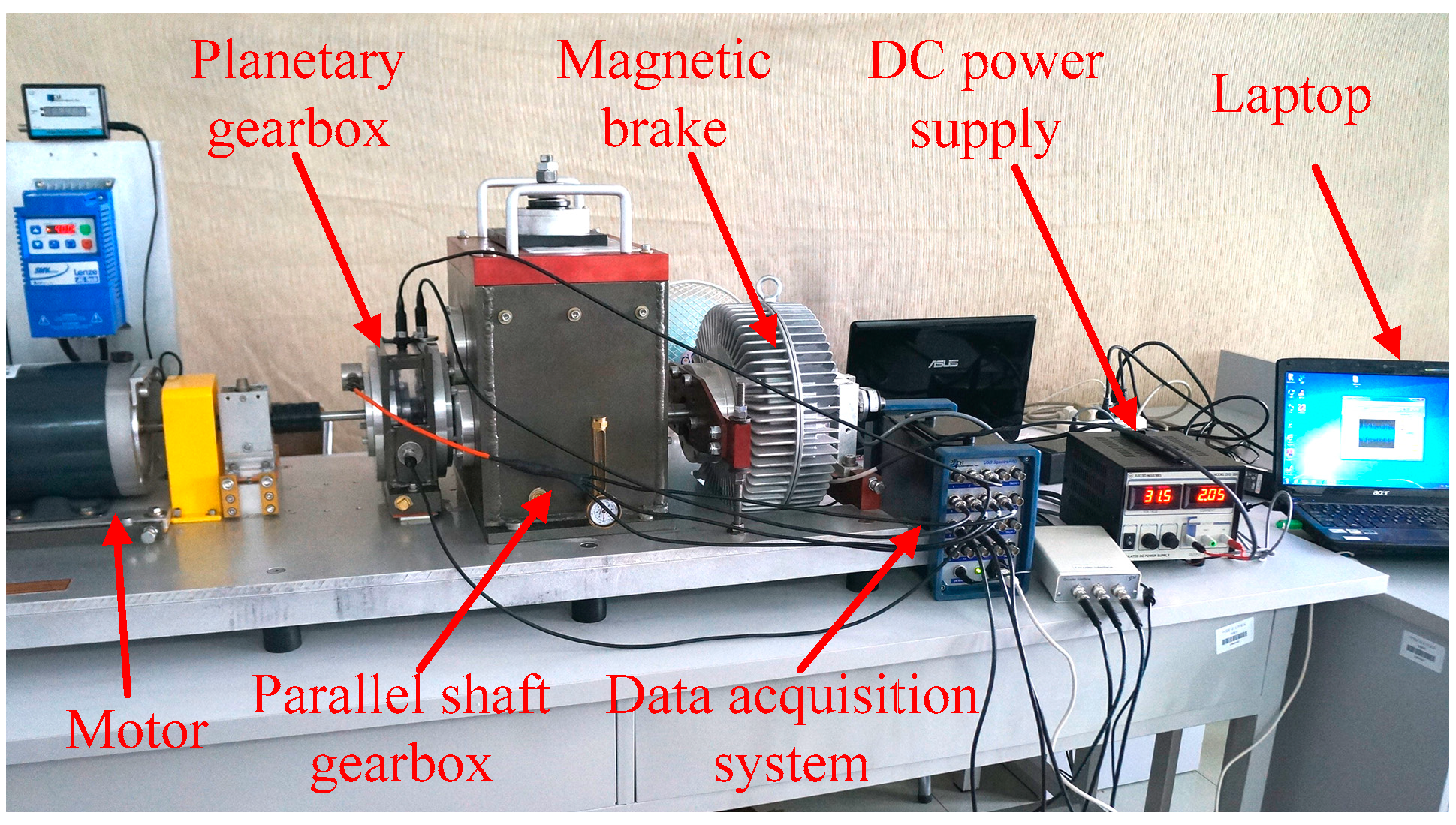
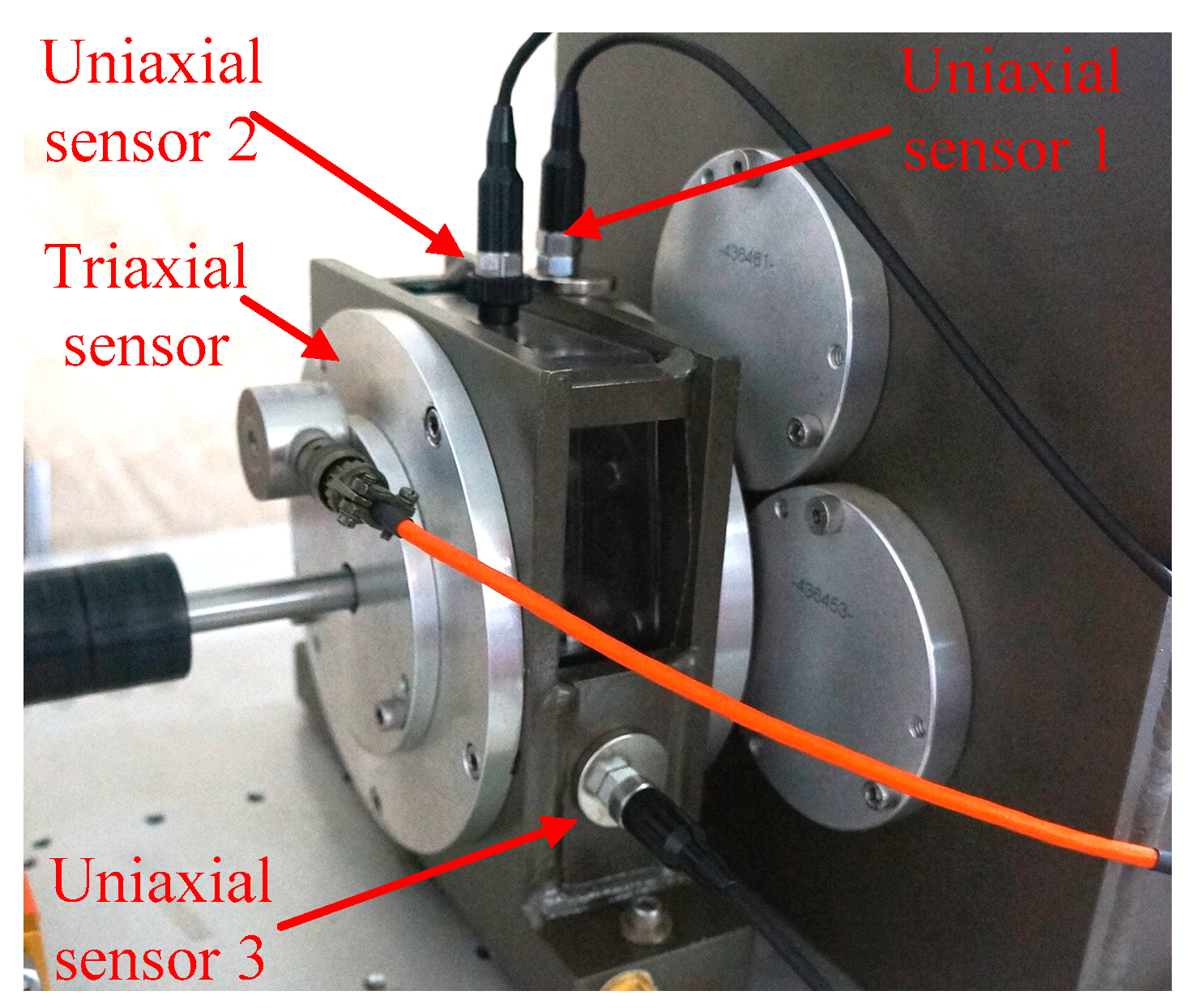
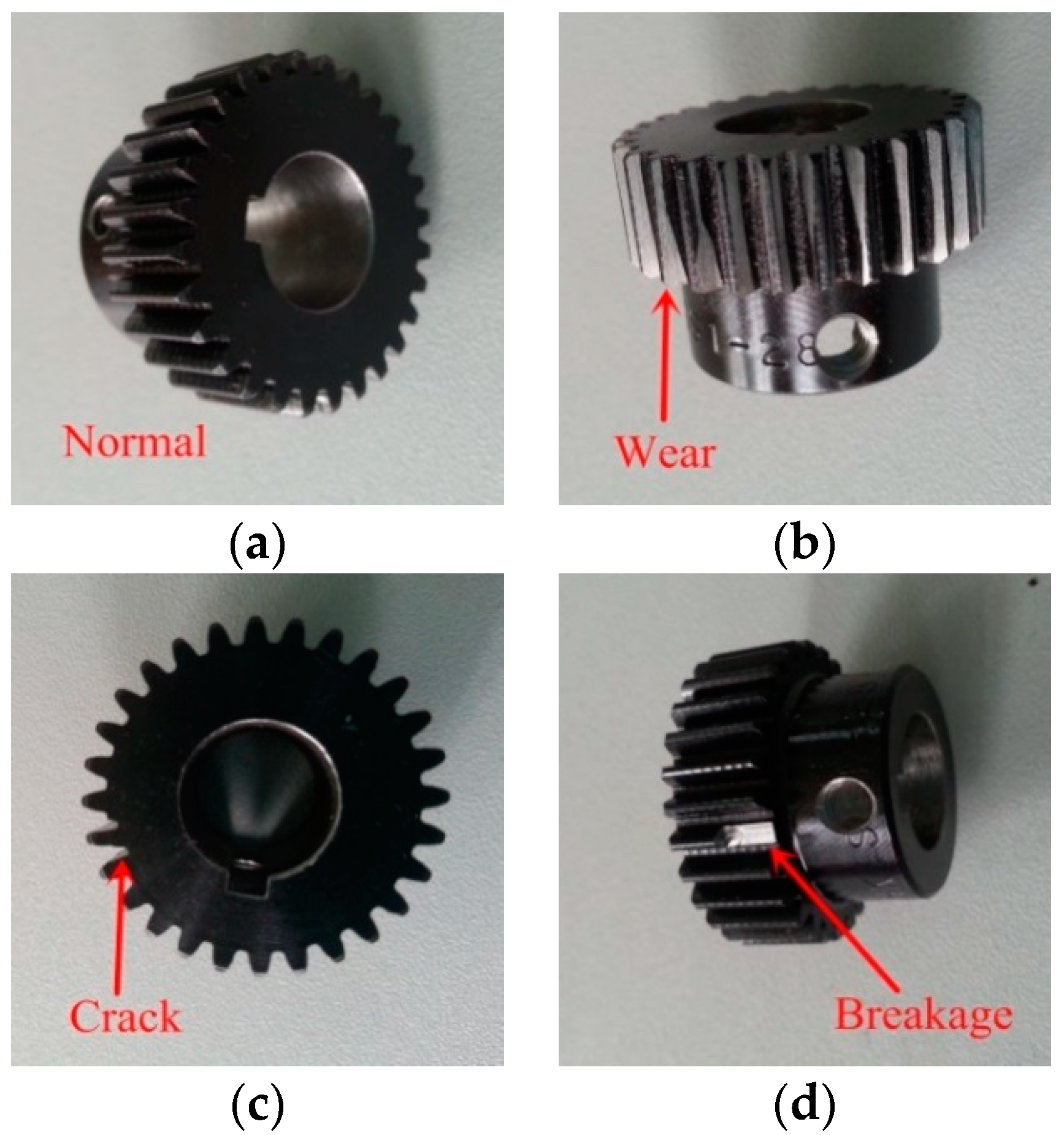
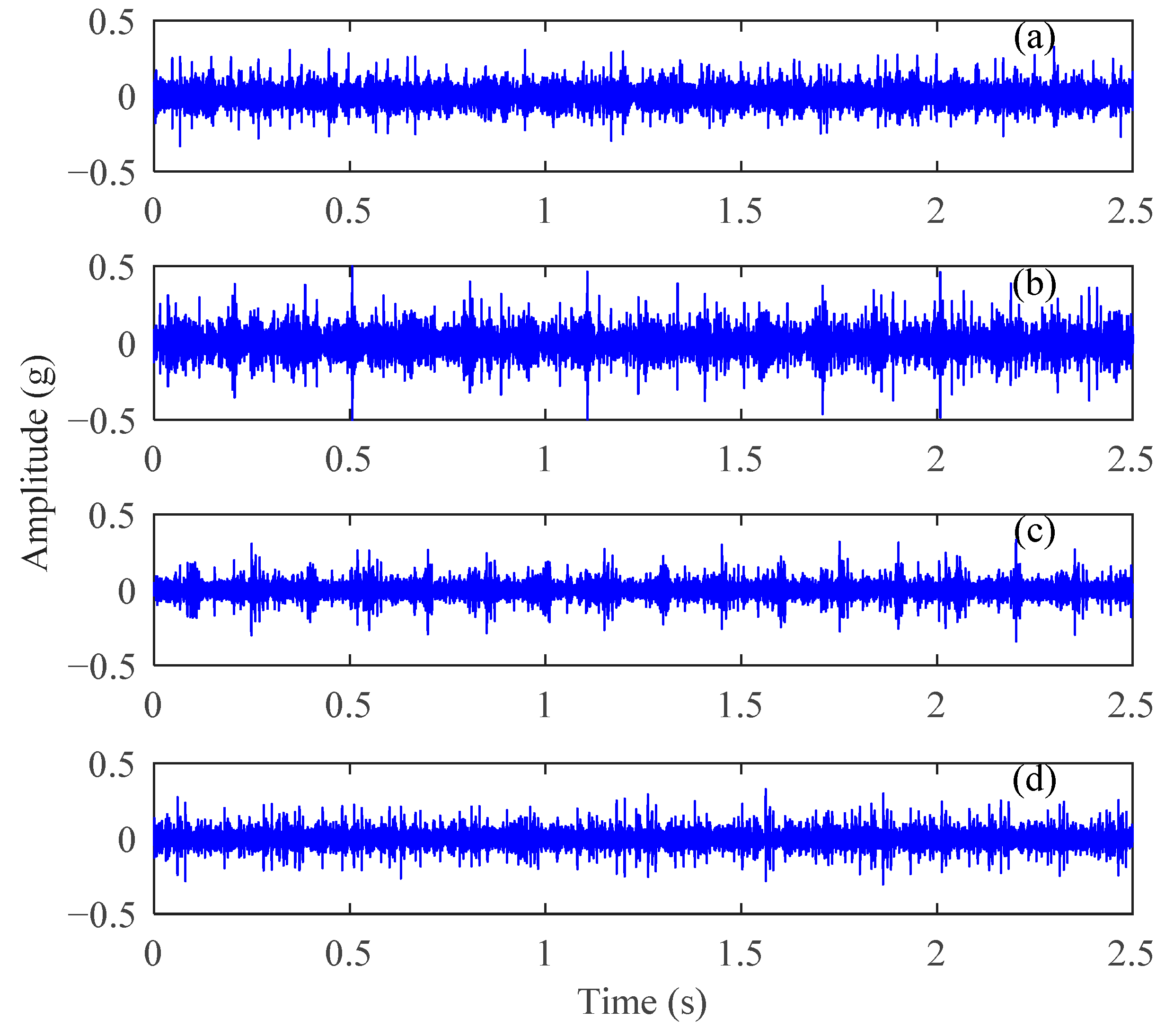
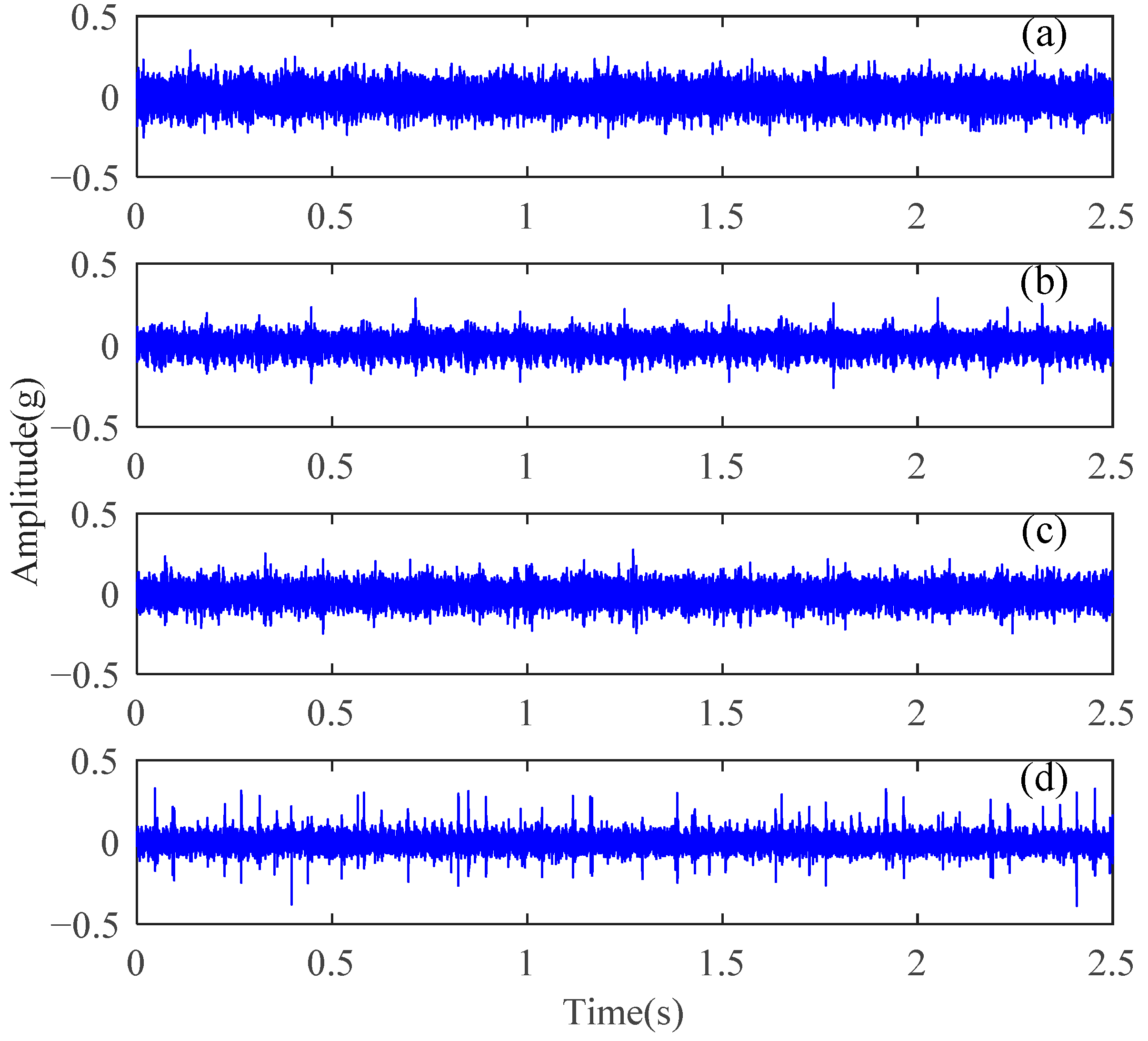
Figure 5. The time-domain waveforms of the vibration signals for normal gear, gear with wear, gear with root crack tooth, and gear with breakage from uniaxial sensor 1 are displayed in
Figure 6. The basic parameters of the two-stage planetary gears of the DDS mechanical fault comprehensive simulation bench are presented in
Table 1.
In addition to normal components, such as meshing frequencies, from the vibration signals of planetary gears in
Figure 6, periodic shock components occur in the normal gear vibration signal. The periodic impact components of fault gear signals are more pronounced than those of normal gear signals. Although some differences exist between the time-domain signal waveforms of different fault state, explicitly describing them remains difficult. The frequencies of these impact components are low and inconsistent with the fault feature frequencies of the planetary gears listed in
Table 1. The gear fault feature information is obscured in the time-domain waveforms of vibration signals and the gear fault state cannot be distinguished effectively.
The gear fault feature information can be extracted using the proposed method of partition fault feature extraction based on VMD and SVD. The vibration signals of the second stage sun gear fault are decomposed by VMD. The number of signal sampling points was 7808, and the corresponding time length was 0.6 s. According to the test specific conditions, while avoiding excessive decomposition, set the modes number
K = 12, quadratic penalty term
α = 2000, and time constant
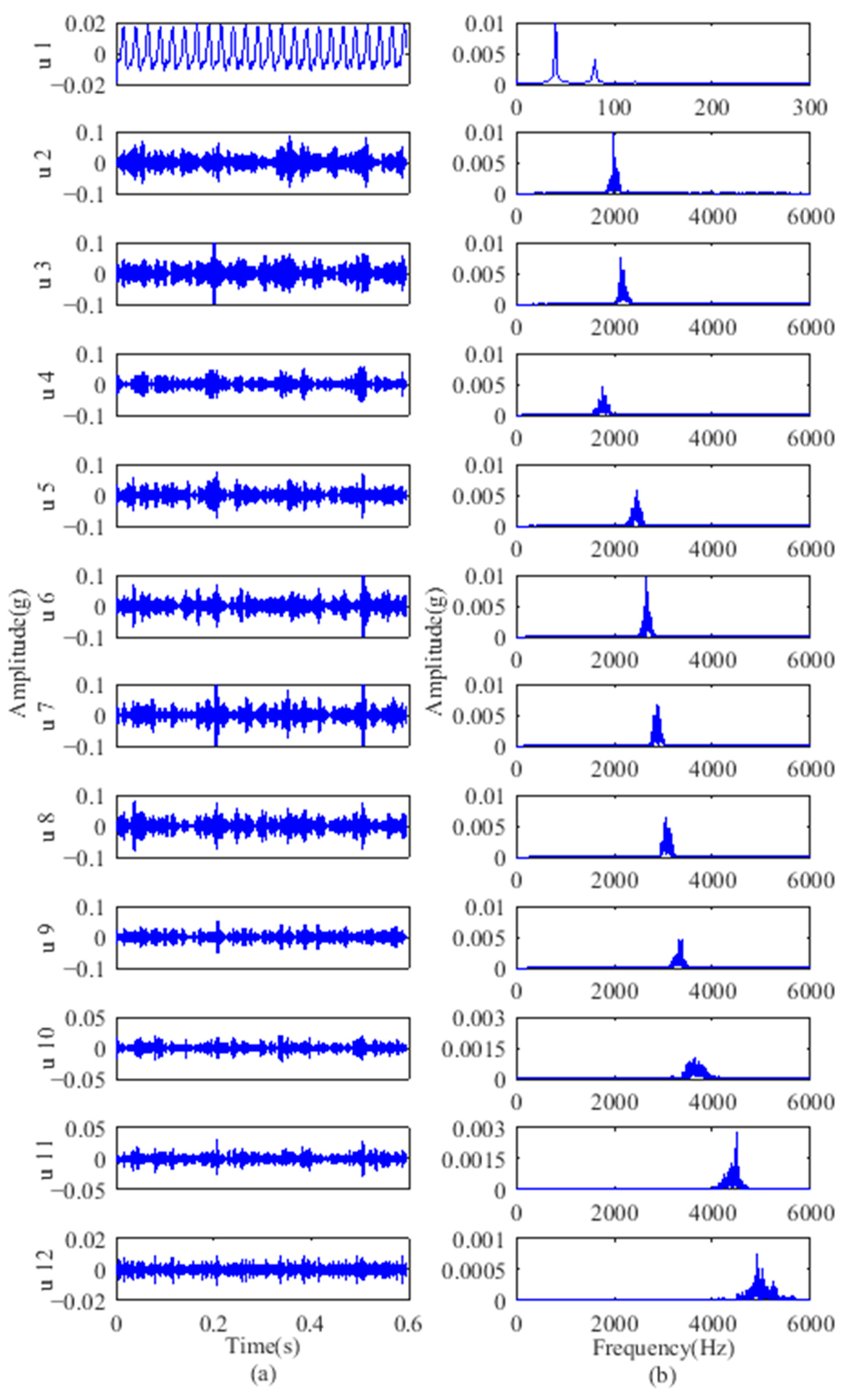
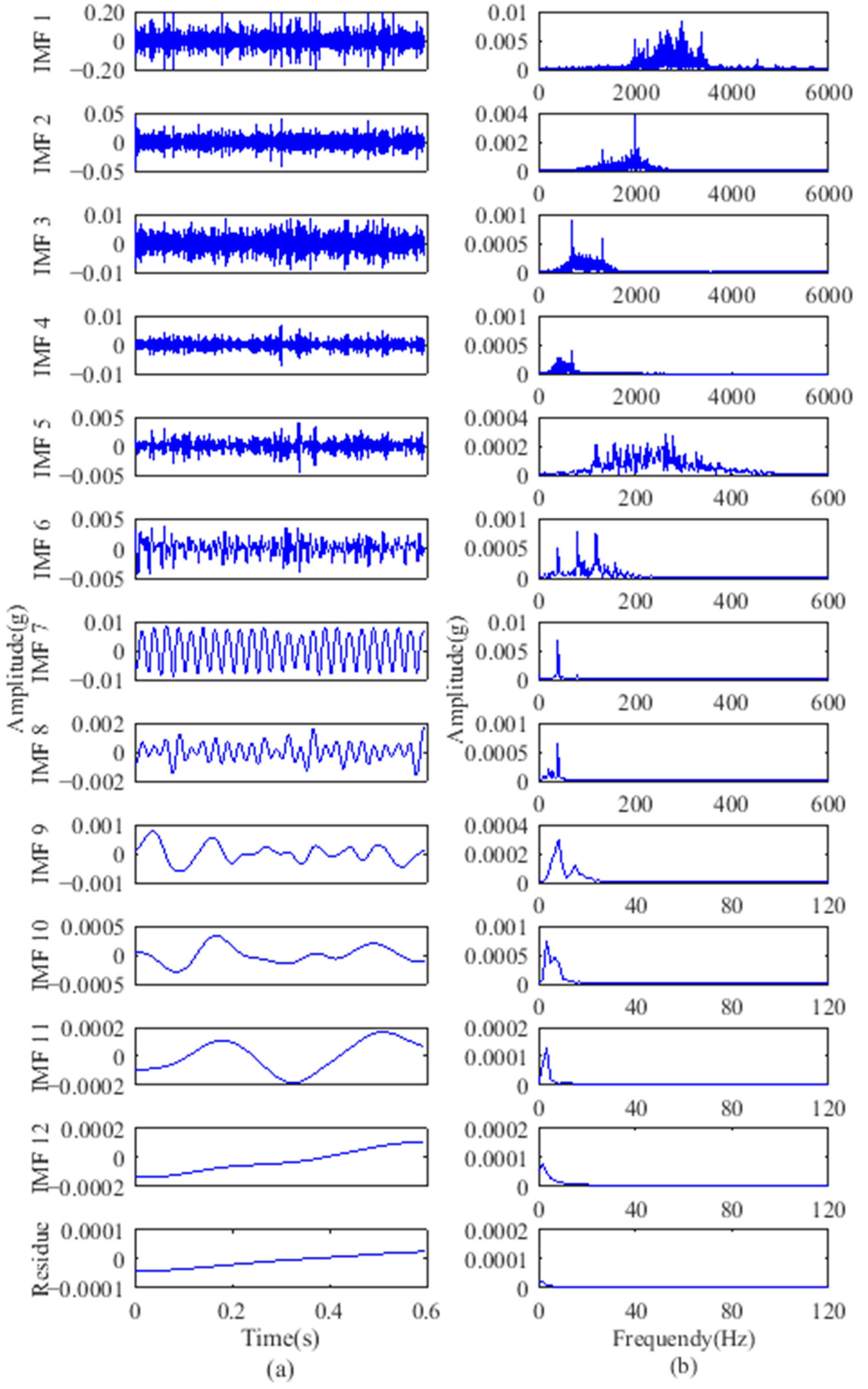
τ = 0. To verify the effectiveness of the proposed method, an ensemble empirical mode decomposition (EEMD) was used to compare with its results with VMD. For EEMD, the amplitude of the added white noise was set to 0.2 times the standard deviation of the original vibration signals and the number of added white noise was set to 100. As an example, the vibration signal of gears with breakage was decomposed to 12 modes using VMD, whereas 12 IMFs and a residual component are obtained using EEMD. Because of the limited space, the first to sixth modes, IMF5 to IMF10, and their spectrums are displayed in
Figure 7 and
Figure 8, respectively.
From
Table 1, the sun gear fault feature frequency of the second stage planetary gear was 20.83 Hz. As indicated, the VMD spectrums in
Figure 7 primarily intercept the 0–3000 Hz frequency band. The motor output frequency of 40 Hz and its harmonic components at 80 Hz can be observed in the first mode. The 2nd–12th modes contain primarily mid- and high-frequency components including a large amount of background noise, meshing frequencies, and their harmonic components. The EEMD spectra show that IMF1–IMF5 contain primarily high-frequency components. The motor output frequency and its harmonic components are divided into different IMFs in
Figure 8. Although VMD has a good decomposition effect, the fault feature frequency components are not pronounced in either the VMD or EEMD results, and their harmonic components cannot be distinguished due to the large number of uncorrelated components in the high frequency band.
From the above analysis, the additional components do not allow obscured fault feature information to be directly distinguished from the modes. Furthermore, EEMD still includes a certain modal aliasing that can identify elusive IMFs. This means that simple time-frequency analysis for IMFs is insufficient and further extraction on this basis is required.
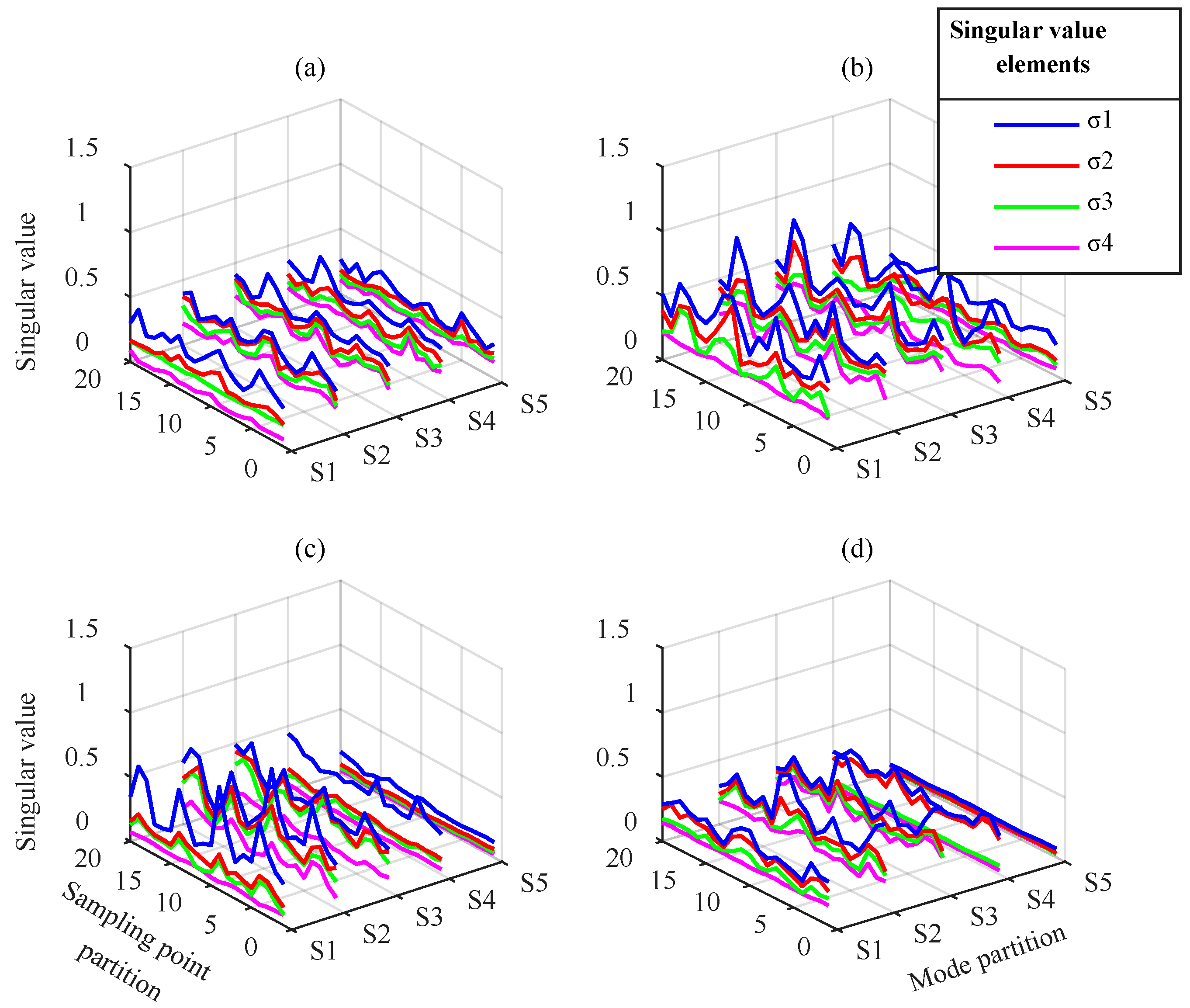
VMD modes and IMFs were processed according to the partition extraction method described in
Section 2. To extract feature information comprehensively, 4 × 512 submatrices were used to partition the mode matrix. The extraction step length of the modes and the sampling points were 4 and 384, respectively. Using SVD, the singular value vector of each submatrix containing four singular value elements,
, were obtained to construct the 20 × 20 singular value vector matrix of the current fault state. The VMD modes and EEMD IMFs partition sequence corresponding to five groups of singular value vectors named S1–S5 are displayed in
Table 2 and the singular value vector matrices are displayed in
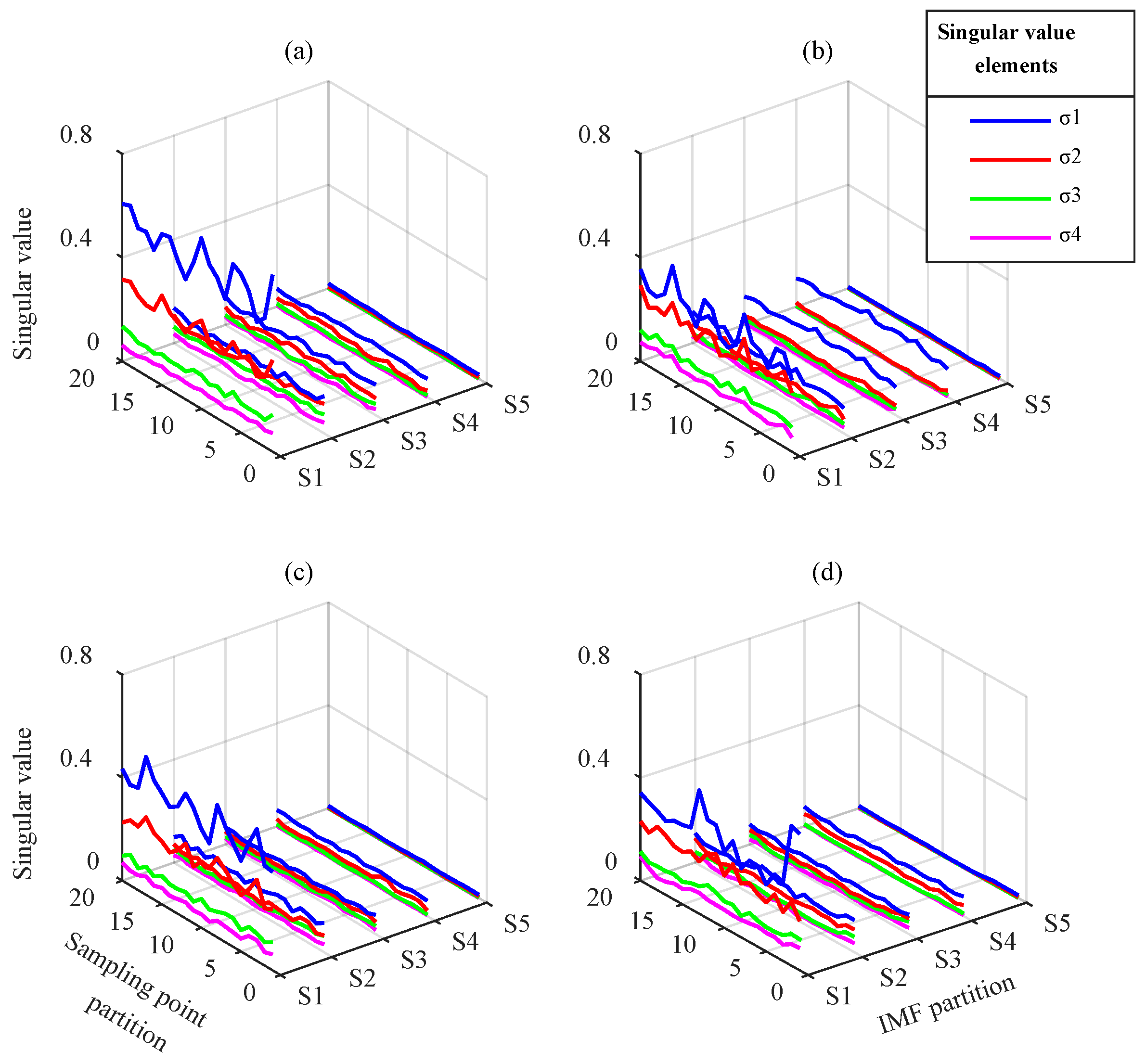
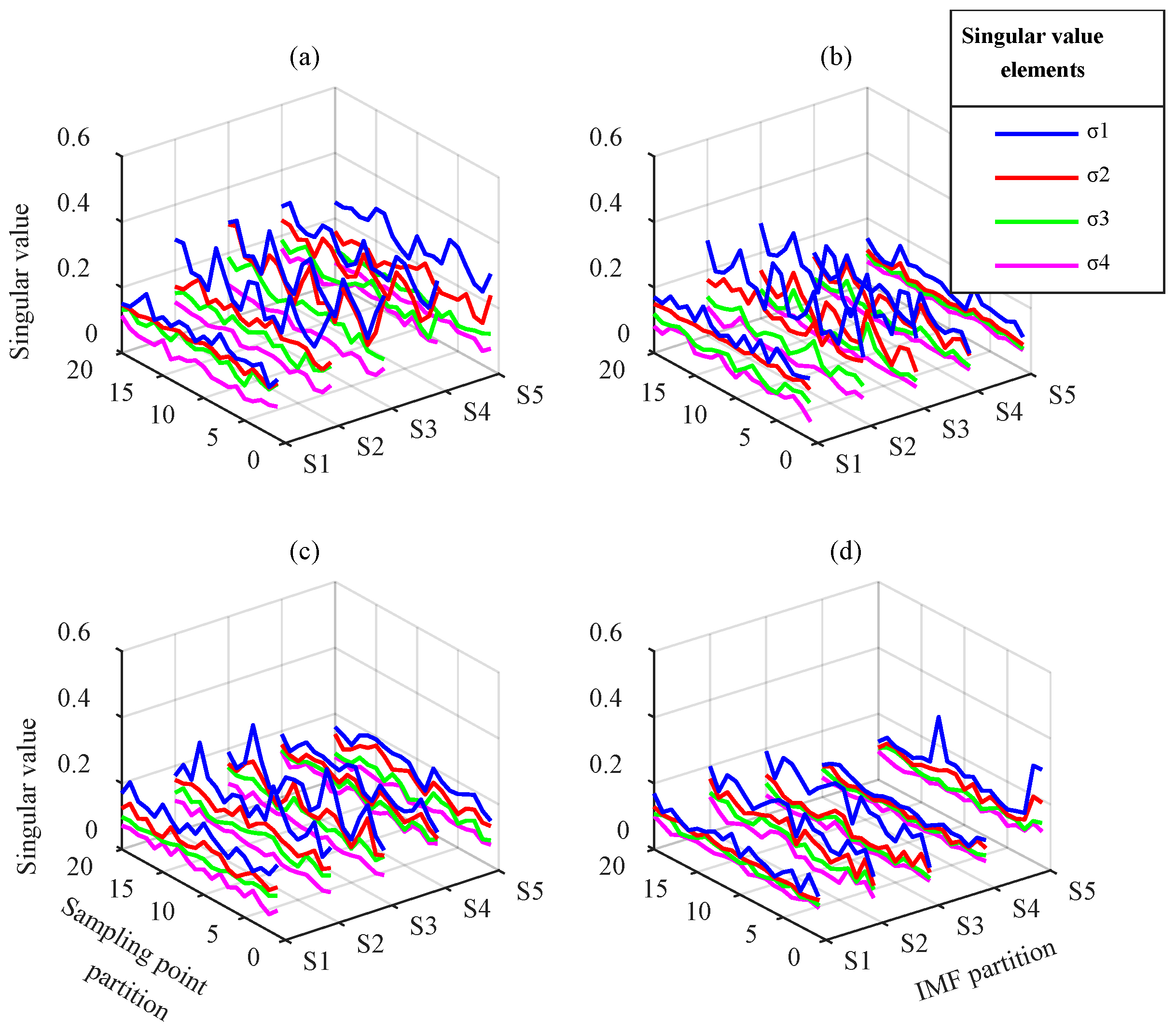
Figure 9 and
Figure 10.
Figure 9 shows the singular value vector matrix obtained by VMD-based partition extraction method. For different gear faults, the matrix elements differences exist at any position in time and mode direction. The waveform of the maximum element of each singular value vector represents the most obvious difference, especially for gear with wear and gear with breakage. This means that VMD performs effective component separation in different frequency bands, and SVD is effective at extracting submatrix characteristics. The fault information is fully extracted, which cannot be distinguished from the simple time-frequency analysis above.
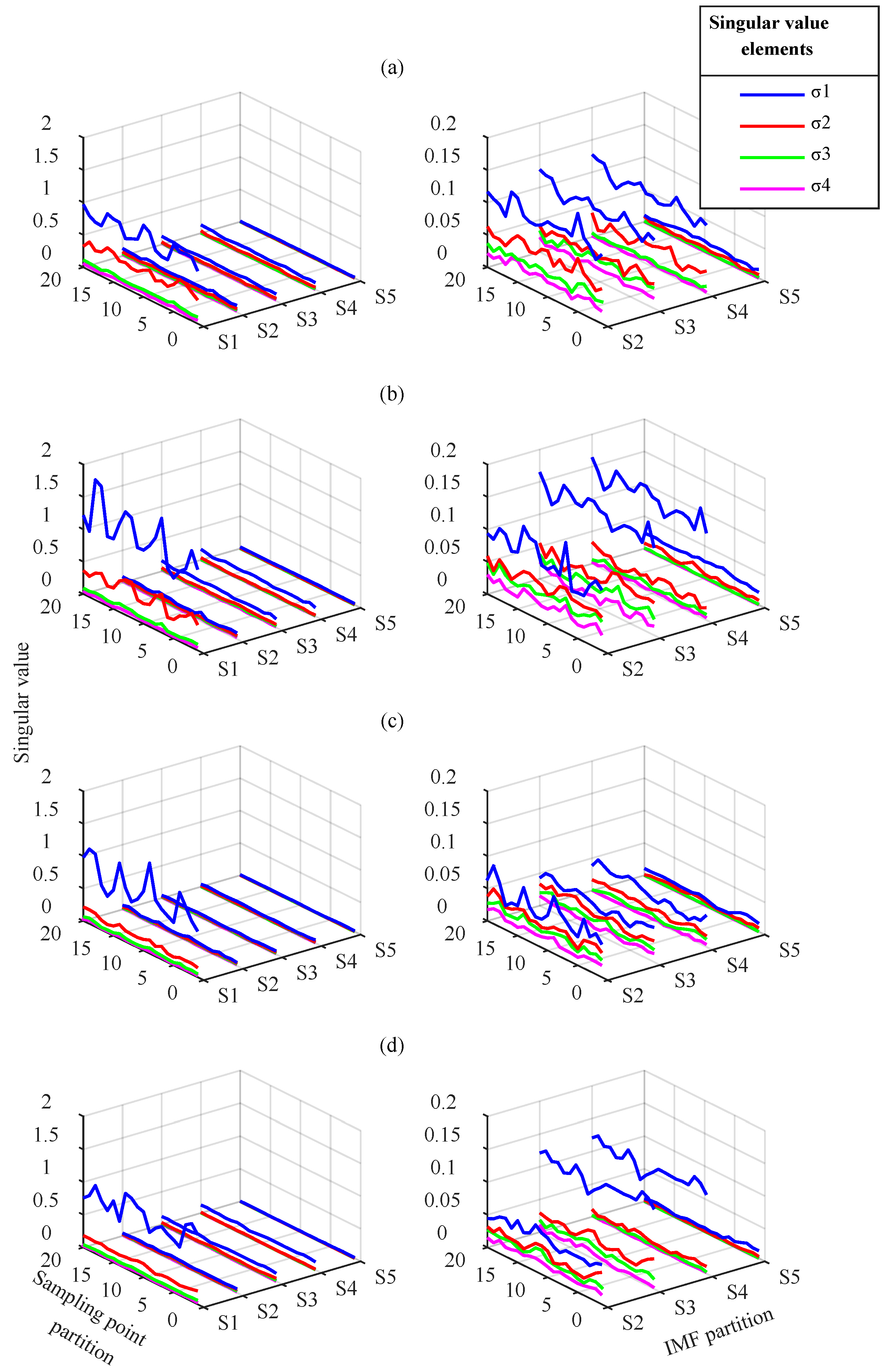
Figure 10 indicates that the elements in singular value vector matrices from EEMD change in different groups. In each single gear state, S1 is obtained from IMF1–IMF4, which mainly contain high-frequency components. The singular values
and
in S1 are typically greater than in S2–S5. The singular values and their arrangement forms in S1–S5 have differences in different fault states. These differences are mainly reflected in the largest element
in S1–S4, whereas other elements are smaller. In general, the feature extraction effect based on EEMD is worse than VMD. Moreover, the modal aliasing of EEMD in mid- and low-frequency bands prevents the effective separation of the signal components. This leads to the low singular value characteristics of the corresponding submatrix, which must be magnified to distinguish the difference. This prevents effective fault classification.
From the above analysis, the distribution and waveform of the submatrices singular values under different fault states are shown to be clearly different. The different information for the different fault states is primarily contained in the maximum singular value of each submatrix of the IMF matrix. Although the latter three singular values are relatively small, they may contain weak fault feature information. For this reason, they are retained in the diagnosis process. Therefore, the singular value vector matrix obtained by partition can be used as the feature parameter to reflect the fault feature information. It can be input to the CNN to achieve fault classification.
Traditional neural networks are typically used to input and distinguish one-dimensional vector data. Before using them to address matrix data, the matrix must be restructured to a vector. Although the reconstructed vector can exhibit the differences in fault states, it can destroy the fluctuation trend relative position in relation to the matrix elements. Using CNN to recognize and distinguish fault feature parameters, the matrix data can be input directly. Because of its special network structure, CNN has more advantages than other neural networks in addressing this type of complex data.
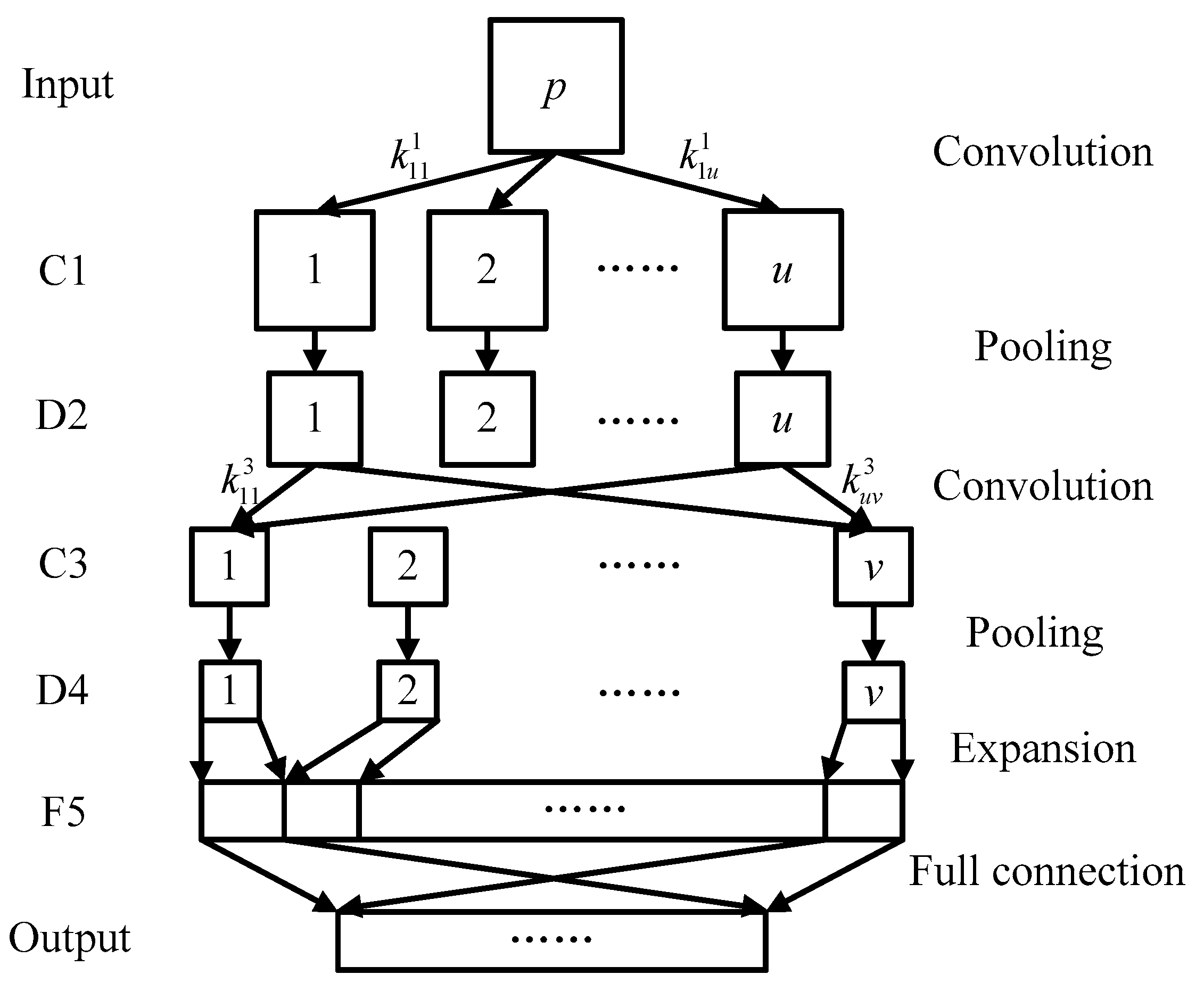
A well-established network structure facilitates the achievement of quality network performance. Although more layers can further abstract the characteristics of the input data, the network structure becomes complex and inefficient. Furthermore, the convolution and pooling of CNN are essentially a kind of dimension reduction process. In this process, the resolution of the data is continuously decreased and details are lost. Therefore, the appropriate number of network layers should consider both the calculation speed and recognition rate; the size of the convolution kernel and pooling region should not be overly large. In this paper, the size of the singular value vector matrix was 20 × 20. The structure of the CNN was built and the network parameters were set accordingly, as indicated in
Figure 1 and
Table 3, respectively. The established CNN consists of alternately arranging two convolution layers and two down sampling layers. The learning rate is one, the number of training samples is five, and the number of iterations is 100.
Using the singular value vector matrix as the fault feature parameter, 300 random samples were constructed using the original vibration signals of four gear states, including 200 training samples and 100 testing samples. They were used as inputs to train and test the network recognition performance. At the end of the neural network, a feature vector with 48 elements was obtained in feature vector layer F5. It was classified by CNN and finally connected to a vector, whose length was four, as the output of the network. The output vector corresponds to the four states of the planetary gear. After network training, the fault identification ability of the CNN was validated; the results are presented in
Table 4. From the test results in
Table 4, CNN achieved acceptable results for both VMD and EEMD. The trained network accurately identified and diagnosed different fault states of the second stage sun gear. The recognition rate was 100% for the normal gear, gear with breakage, and gear with root crack tooth. The only two errors appeared in the wear fault diagnosis using the EEMD-based partition method, with a 92% recognition rate, whereas the VMD-based method had a total recognition rate of 100%. The errors could be a result of multiple factors such as the degree of the gear fault, repeated tests of the normal gear, and interference due to environmental noise.
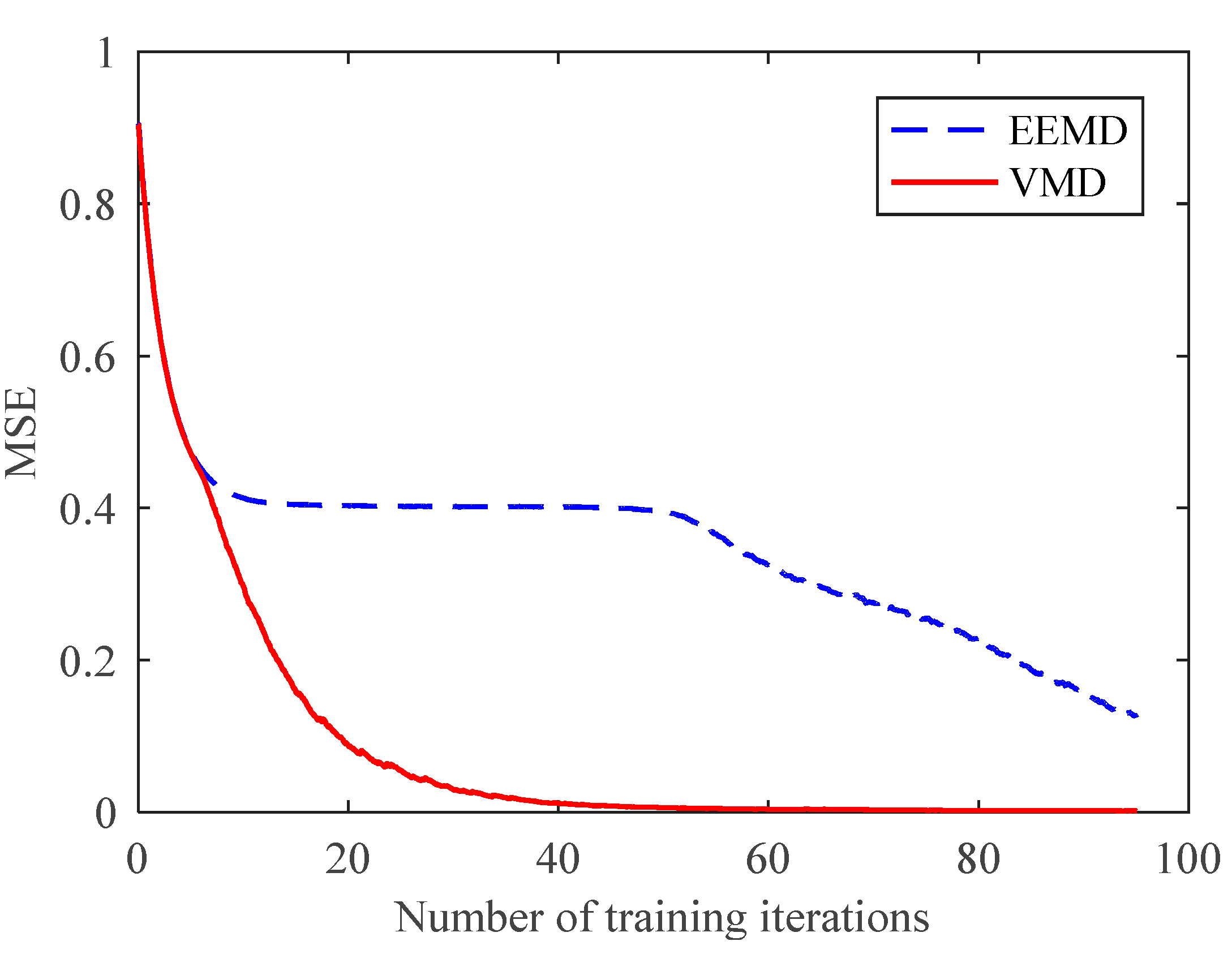
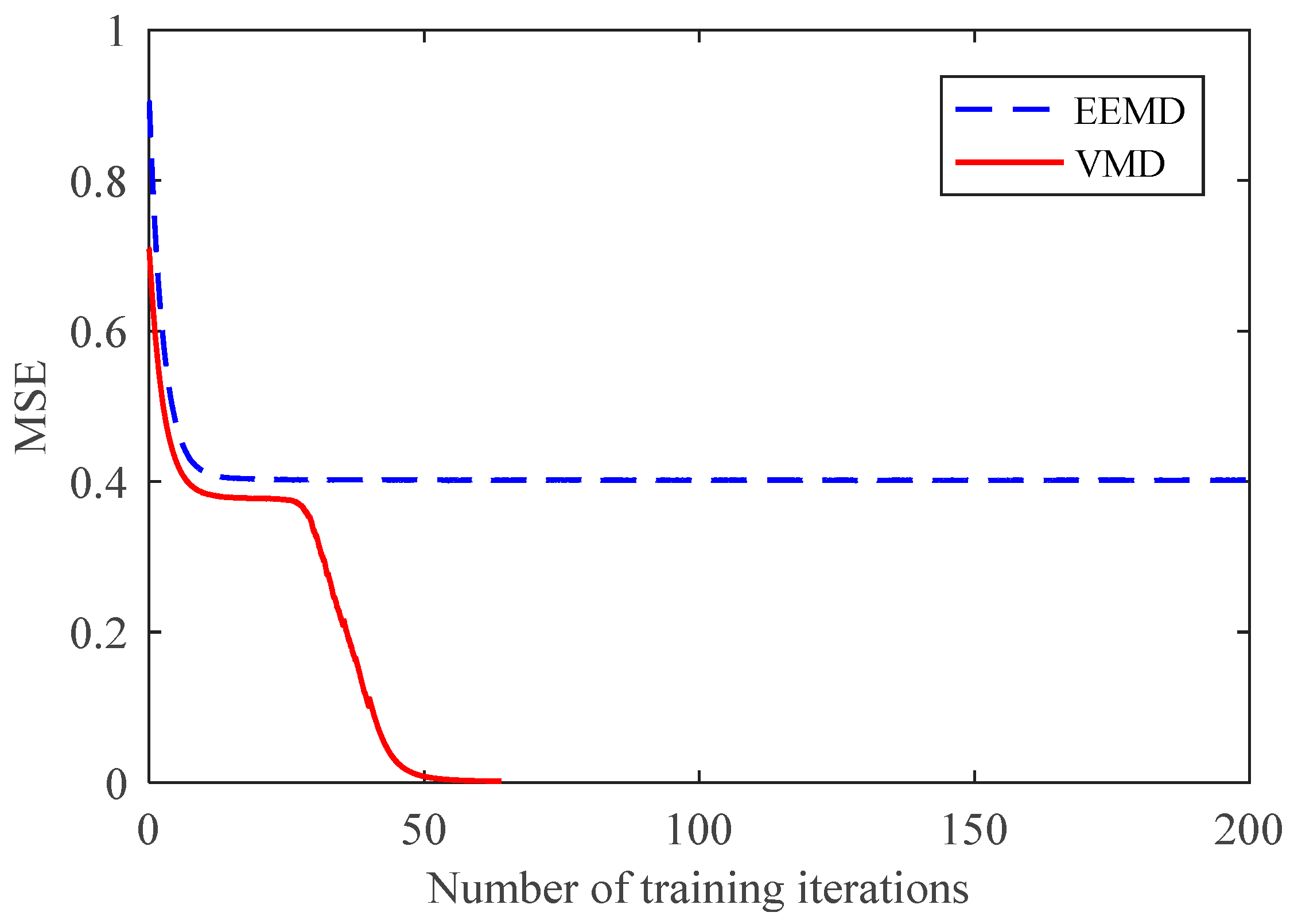
However, further comparative analysis showed the speed advantage of the VMD-based partition extraction method. As shown in
Figure 11, the mean square error (MSE) curves of CNN decreased with training time. The MSE of the CNN trained with VMD samples had a much faster decreasing speed, which means a better training effect. In fact, samples from VMD only required 14 iterations to obtain a 100% total recognition rate. This effect has never been achieved by samples from EEMD with training 100 times. The slow training speed of the CNN proves that the EEMD-based partition method is insufficient for fault feature extraction and state classification. In contrast, the advantages of the VMD-based partition method in feature extraction, training speed, and recognition rate are reflected. Based on the above results, the proposed method was proven to effectively extract fault feature information and accurately diagnose planetary gear faults.
5. Application in Degradation Recognition of Planetary Gears
To further validate the effectiveness of the proposed method and extend its application field, a breakage degradation experiment of the second stage sun gear was performed and analysed.
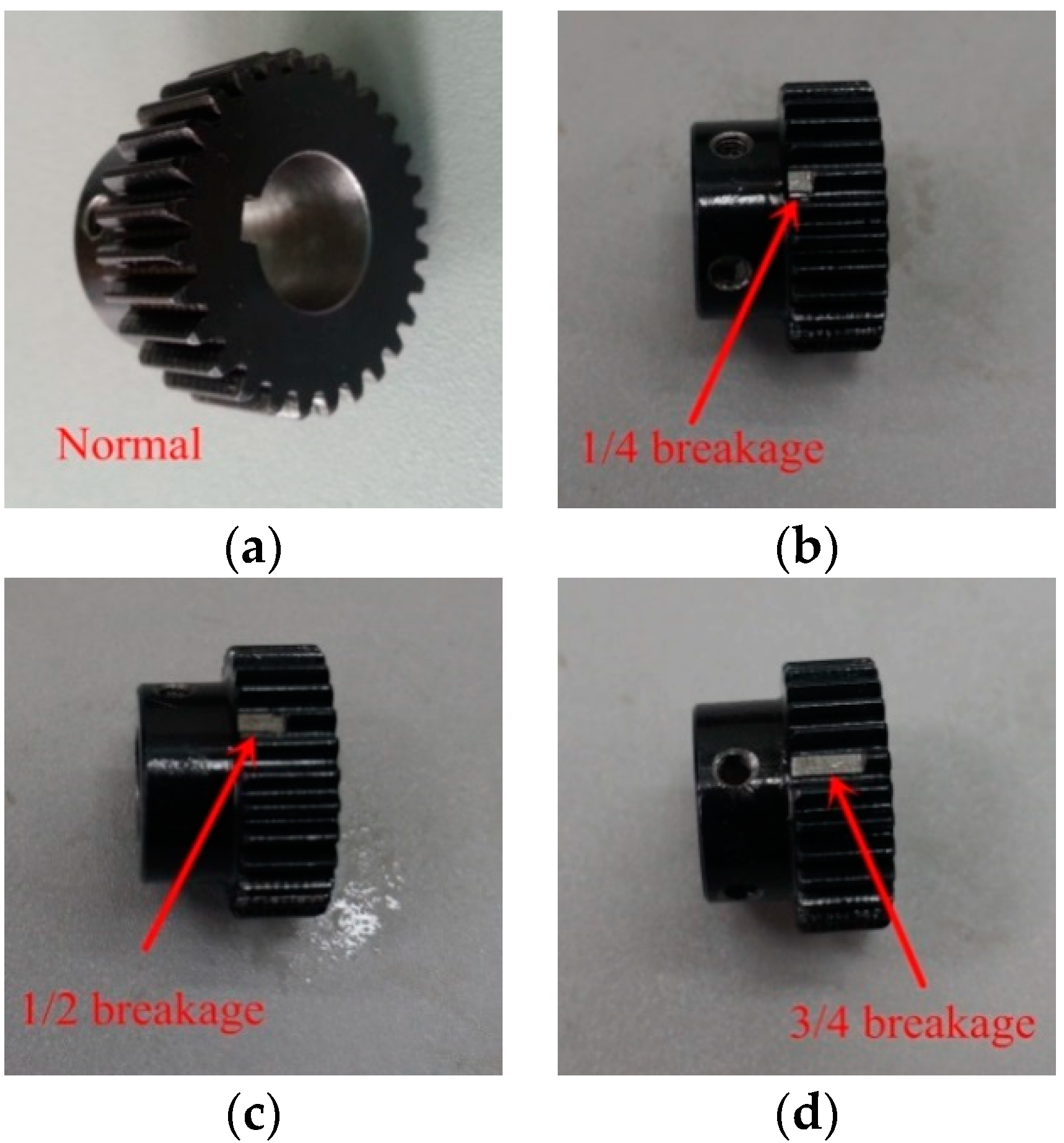
As shown in
Figure 12, the second-stage sun gear degradation experiment was completed using normal gear, gear with one-quarter, one-half, and three-quarters breakage. The motor output frequency was 45 Hz and the other parameters were set the same as in
Section 3 and
Section 4. Vibration signals were collected and are shown in
Figure 13. The differences in the time-domain vibration signals in different degradation states were weaker than in different fault states. This increases the difficulty of feature extraction and recognition.
The degradation feature matrices obtained by EEMD and VMD are shown in
Figure 14 and
Figure 15, respectively. EEMD resulted in poor extraction effect and could not effectively distinguish weak differences in different degradation states. Conversely, in the degradation feature matrices obtained by VMD, all singular value vectors changed with gear degradation. This indicates that the degradation information contained in different frequency bands was extracted synthetically.
A total of 200 training samples and 100 test samples were randomly constructed to input to the CNN. The comparison of the test results is shown in
Figure 16 and
Table 5. The EEMD-based method had a very low recognition rate and its MSE could not continue to decline, which means that the performance of the EEMD method was insufficient for degradation states with similar features. The MSE curve of the VMD-based method was reduced to nearby 0 after training 70 times, and the recognition rate was 100%. This proves that the proposed method can fully extract feature information and utilize the recognition ability of CNN. It can not only diagnose different faults of planetary gears, but also accurately identify the degradation states.
Notably, the proposed method is just an option for feature extraction and diagnosis. As it can retain the signal information in both the time domain and frequency domains, the method capability under more complex conditions still has room for further research and improvement.



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}