A Model for Remote Depth Estimation of Buried Radioactive Wastes Using CdZnTe Detector



Abstract
:1. Introduction
2. Materials and Methods
2.1. The Approximate Three-Dimensional Linear Attenuation Model
2.2. Experiment
2.3. Spectrum Acquisition and Preprocessing
Photo-Peak Fitting
3. Results and Discussions
3.1. Results for Caesium-137
Effect of Scanning Time
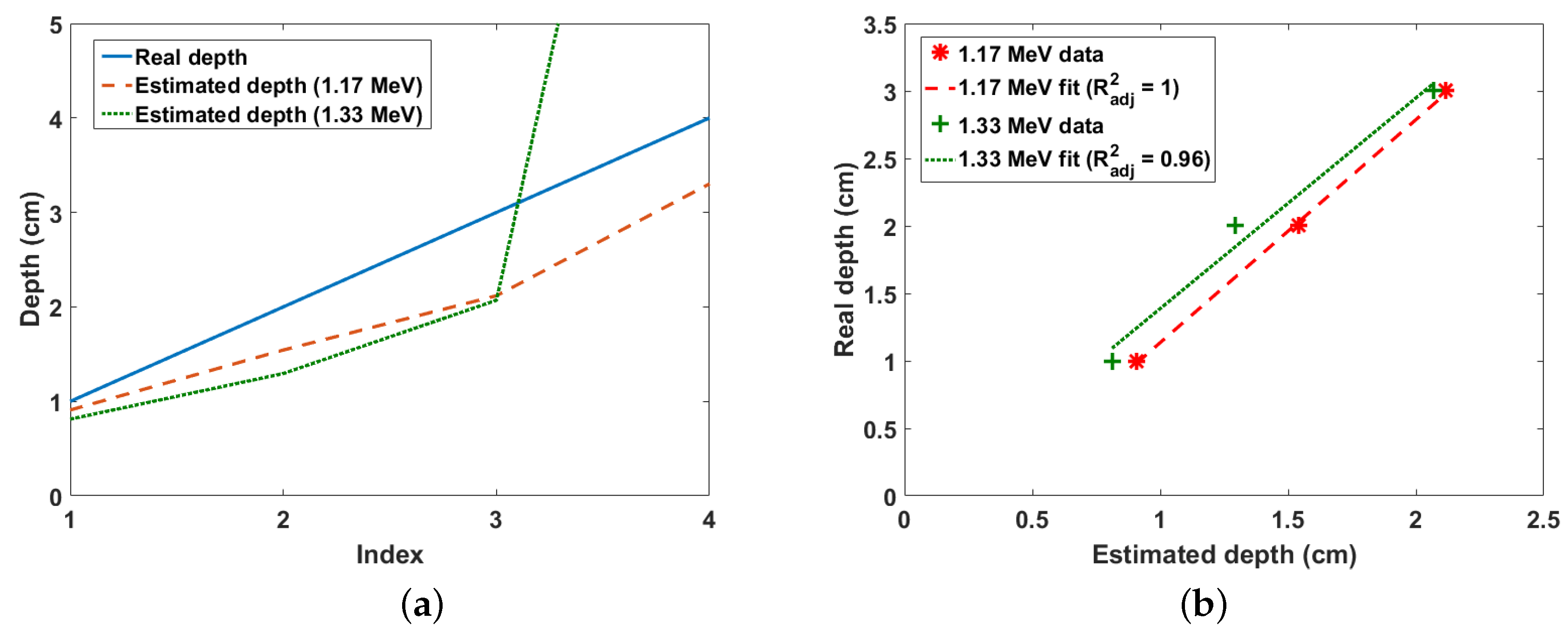
3.2. Results for Cobalt-60
4. Conclusions
Author Contributions
Acknowledgments
Conflicts of Interest
References
- Charles, M.; Harrison, J.; Darley, P.; Fell, T. Health implications of Dounreay fuel fragments: Estimates of doses and risks. In Proceedings of the Seventh Internat ional Symposium of the Society for Radiological Protection, Cardiff, UK, 12–17 June 2005; pp. 23–29. [Google Scholar]
- Wilkins, B.T.; Harrison, J.D.; Smith, K.R.; Phipps, A.W.; Bedwell, P.; Etherington, G.; Youngman, M.; Fell, T.P.; Charles, M.W.; Darley, P.J. Health Implications of Fragments of Irradiated Fuel at the Beach at Sandside Bay Module 6: Overall Results; Technical Report; Health Protection Agency: Oxfordshire, UK, 2006. [Google Scholar]
- Miller, B.; Foster, A.; Nuvia, M.D.; Hill, M.; Foster, A. Pipeline Characterisation and Decommissioning within the Nuclear Industry : Technology Review and Site Experience; Technical Report 2; Nuclear Decommissioning Authority: Cumbria, UK, 2016. [Google Scholar]
- Miller, B.; Foster, A.; Burgess, P.; Metrology, R.; Hill, M.; Foster, A. Pipeline Characterisation and Decommissioning within the Nuclear Industry : Good Practice Guide; Technical Report 2; Nuclear Decommissioning Authority: Cumbria, UK, 2016. [Google Scholar]
- Lal, R.; Fifield, L.; Tims, S.; Wasson, R. 239 Pu fallout across continental Australia: Implications on 239 Pu use as a soil tracer. J. Environ. Radioact. 2017, 178, 394–403. [Google Scholar] [CrossRef] [PubMed]
- Adams, J.C.; Mellor, M.; Joyce, M.J. Depth determination of buried caesium-137 and cobalt-60 sources using scatter peak data. IEEE Trans. Nucl. Sci. 2010, 57, 2752–2757. [Google Scholar] [CrossRef]
- Popp, A.; Ardouin, C.; Alexander, M.; Blackley, R.; Murray, A. Improvement of a high risk category source buried in the grounds of a hospital in Cambodia. In Proceedings of the 3th International Congress of the International Radiation Protection Association (IRPA), Glasgow, UK, 13–18 May 2012; pp. 1–10. [Google Scholar]
- Maeda, K.; Sasaki, S.; Kumai, M.; Sato, I.; Suto, M.; Ohsaka, M.; Goto, T.; Sakai, H.; Chigira, T.; Murata, H. Distribution of radioactive nuclides of boring core samples extracted from concrete structures of reactor buildings in the Fukushima Daiichi Nuclear Power Plant. J. Nucl. Sci. Technol. 2014, 51, 1006–1023. [Google Scholar] [CrossRef]
- Adams, J.C.; Joyce, M.J.; Mellor, M. The advancement of a technique using principal component analysis for the non-intrusive depth profiling of radioactive contamination. Nucl. Sci. IEEE Trans. 2012, 59, 1448–1452. [Google Scholar] [CrossRef]
- Adams, J.C.; Joyce, M.J.; Mellor, M. Depth profiling 137Cs and 60Co non-intrusively for a suite of industrial shielding materials and at depths beyond 50mm. Appl. Radiat. Isot. 2012, 70, 1150–1153. [Google Scholar] [CrossRef] [PubMed]
- Shippen, A.; Joyce, M.J. Profiling the depth of caesium-137 contamination in concrete via a relative linear attenuation model. Appl. Radiat. Isot. 2010, 68, 631–634. [Google Scholar] [CrossRef] [PubMed]
- Shippen, B.A.; Joyce, M.J. Extension of the linear depth attenuation method for the radioactivity depth analysis tool (RADPAT). IEEE Trans. Nucl. Sci. 2011, 58, 1145–1150. [Google Scholar] [CrossRef]
- Ukaegbu, I.; Gamage, K. A Novel Method for Remote Depth Estimation of Buried Radioactive Contamination. Sensors 2018, 18, 507. [Google Scholar] [CrossRef] [PubMed]
- Del Sordo, S.; Abbene, L.; Caroli, E.; Mancini, A.M.; Zappettini, A.; Ubertini, P. Progress in the development of CdTe and CdZnTe semiconductor radiation detectors for astrophysical and medical applications. Sensors 2009, 9, 3491–3526. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Wahl, C.G.; Kaye, W.R.; Wang, W.; Zhang, F.; Jaworski, J.M.; King, A.; Boucher, Y.A.; He, Z. The Polaris-H imaging spectrometer. Nucl. Instrum. Methods Phys. Res. A-Accel. Spectrom. Detect. Assoc. Equip. 2015, 784, 377–381. [Google Scholar] [CrossRef]
- Goodman, D.; Streicher, M.; Zhu, Y.; Brown, S.; He, Z. 1-D Fast Neutron Source Localization Using Digital Pixelated 3-D Position-Sensitive CdZnTe Detectors. IEEE Trans. Nucl. Sci. 2017, 64, 2531–2535. [Google Scholar] [CrossRef]
- Georgiev, a.; Gast, W. Digital pulse processing in high-resolution, high-throughput, gamma-ray spectroscopy. IEEE Trans. Nucl. Sci. 1993, 40, 770–779. [Google Scholar] [CrossRef]
- Kavatsyuk, M.; Bremer, D.; Dormenev, V.; Drexler, P.; Eissner, T.; Erni, W.; Guliyev, E.; Hennino, T.; Krusche, B.; Lewandowski, B.; et al. Performance of the prototype of the Electromagnetic Calorimeter for PANDA. Nucl. Instrum. Methods Phys. Res. A-Accel. Spectrom. Detect. Assoc. Equip. 2011, 648, 77–91. [Google Scholar] [CrossRef]
- Mortreau, P.; Berndt, R. Characterization of cadmium zinc telluride detector spectra—Application to the analysis of spent fuel spectra. Nucl. Instrum. Methods Phys. Res. A-Accel. Spectrom. Detect. Assoc. Equip. 2001, 458, 183–188. [Google Scholar] [CrossRef]
- National Institute of Standards and Technology. X-Ray Mass Attenuation Coefficients; National Institute of Standards and Technology: Gaithersburg, MD, USA, 2004. Available online: https://www.nist.gov/pml/x-ray-mass-attenuation-coefficients (accessed on 16 November 2017).











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Element | Weight Fraction |
|---|---|
| C | 0.1714 |
| O | 0.5163 |
| Na | 0.0013 |
| Al | 0.0151 |
| Si | 0.2755 |
| K | 0.0072 |
| Ca | 0.0006 |
| Fe | 0.0072 |
| P | 0.0003 |
| S | 0.0004 |
| Ti | 0.0005 |
| Cu | 0.0009 |
| Mg | 0.0020 |
| Zn | 0.0014 |
| 1.0000 |
| Depths (cm) | Gradient | Intercept | |
|---|---|---|---|
| Experiment | |||
| 15 min | 2–14 | 1.4 ± 0.1 | −1.6 ± 0.9 |
| 20 min | 2–16 | 1.4 ± 0.1 | −1.5 ± 1.2 |
| 25 min | 2–18 | 1.5 ± 0.2 | −2.2 ± 1.6 |
| Simulation [13] | 2–40 | 1.6 ± 0.1 | −2.0 ± 0.6 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ukaegbu, I.K.; Gamage, K.A.A. A Model for Remote Depth Estimation of Buried Radioactive Wastes Using CdZnTe Detector. Sensors 2018, 18, 1612. https://doi.org/10.3390/s18051612
Ukaegbu IK, Gamage KAA. A Model for Remote Depth Estimation of Buried Radioactive Wastes Using CdZnTe Detector. Sensors. 2018; 18(5):1612. https://doi.org/10.3390/s18051612
Chicago/Turabian StyleUkaegbu, Ikechukwu Kevin, and Kelum A. A. Gamage. 2018. "A Model for Remote Depth Estimation of Buried Radioactive Wastes Using CdZnTe Detector" Sensors 18, no. 5: 1612. https://doi.org/10.3390/s18051612
APA StyleUkaegbu, I. K., & Gamage, K. A. A. (2018). A Model for Remote Depth Estimation of Buried Radioactive Wastes Using CdZnTe Detector. Sensors, 18(5), 1612. https://doi.org/10.3390/s18051612