Flying Real-Time Network to Coordinate Disaster Relief Activities in Urban Areas †


 , , and
, , and
Abstract
:1. Introduction
2. Related Work
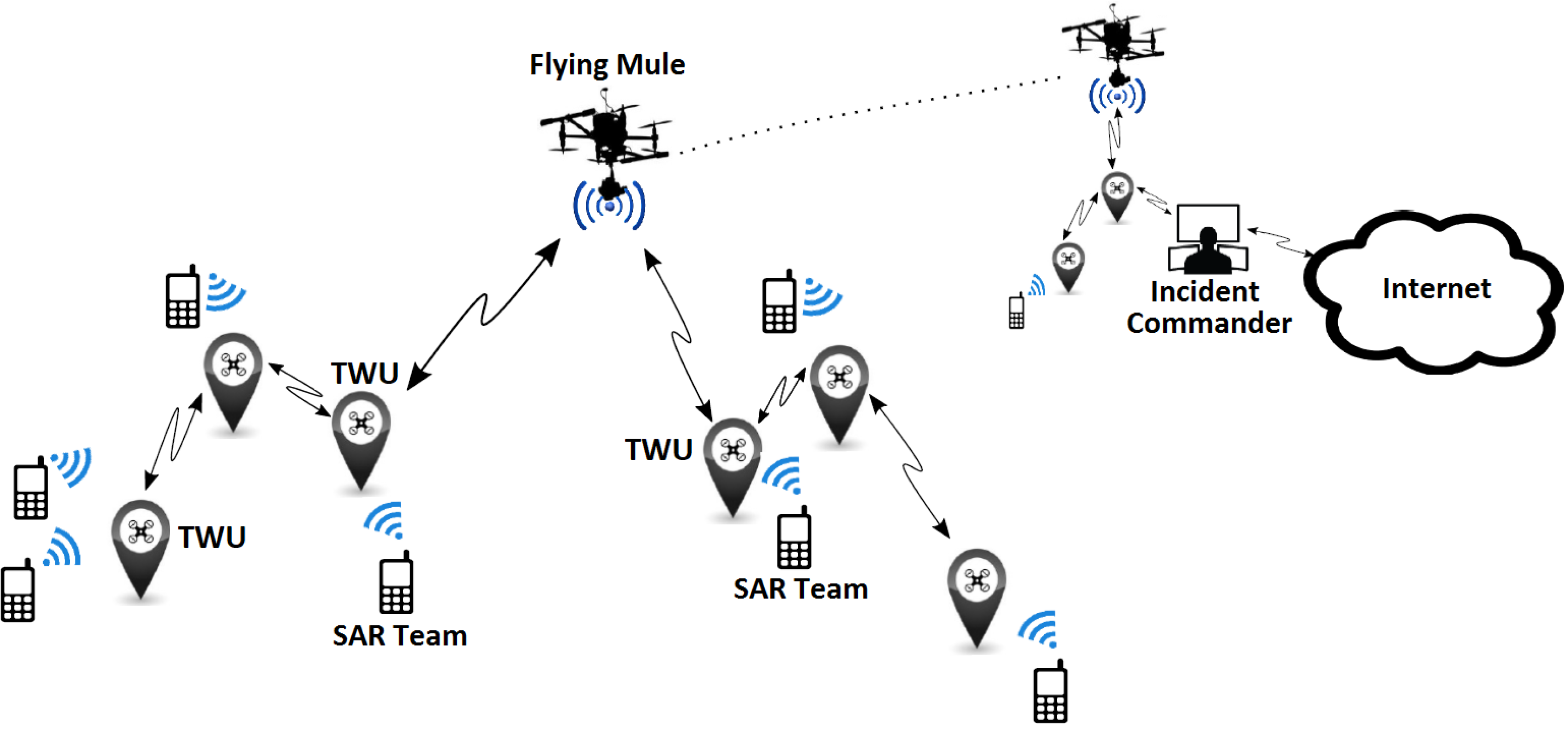
3. Proposed Network System
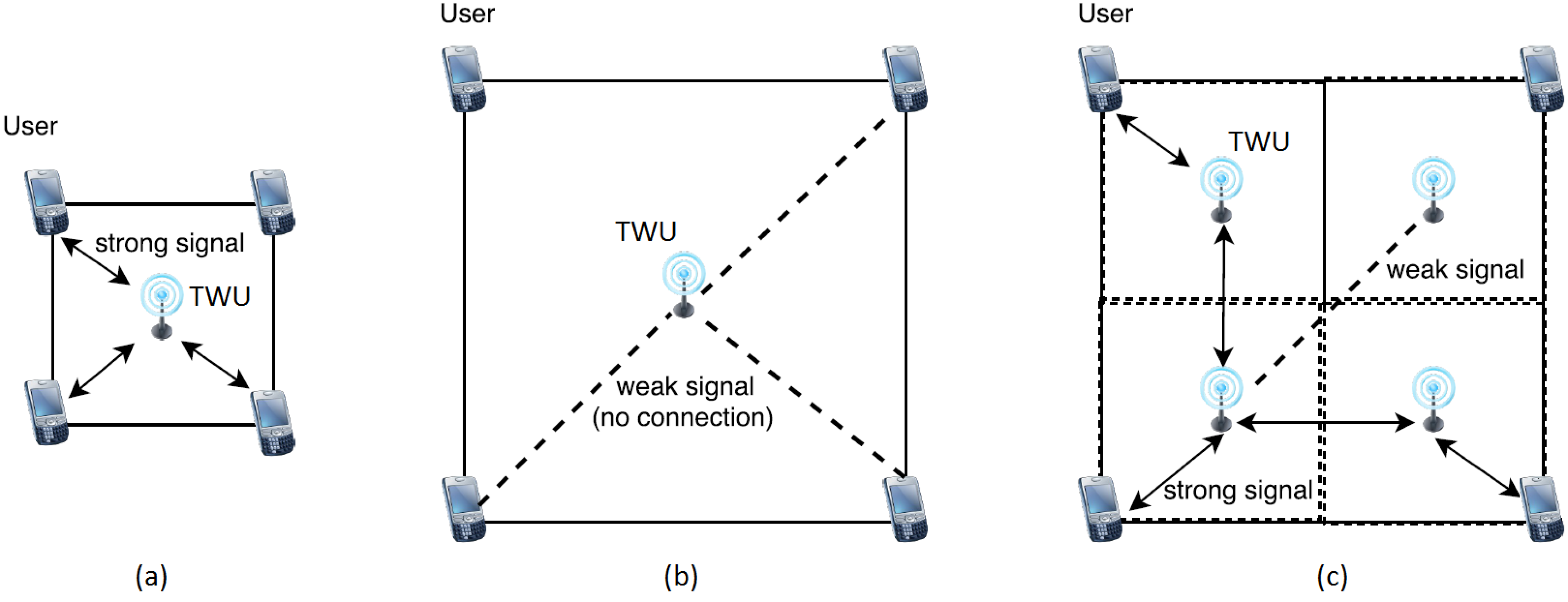
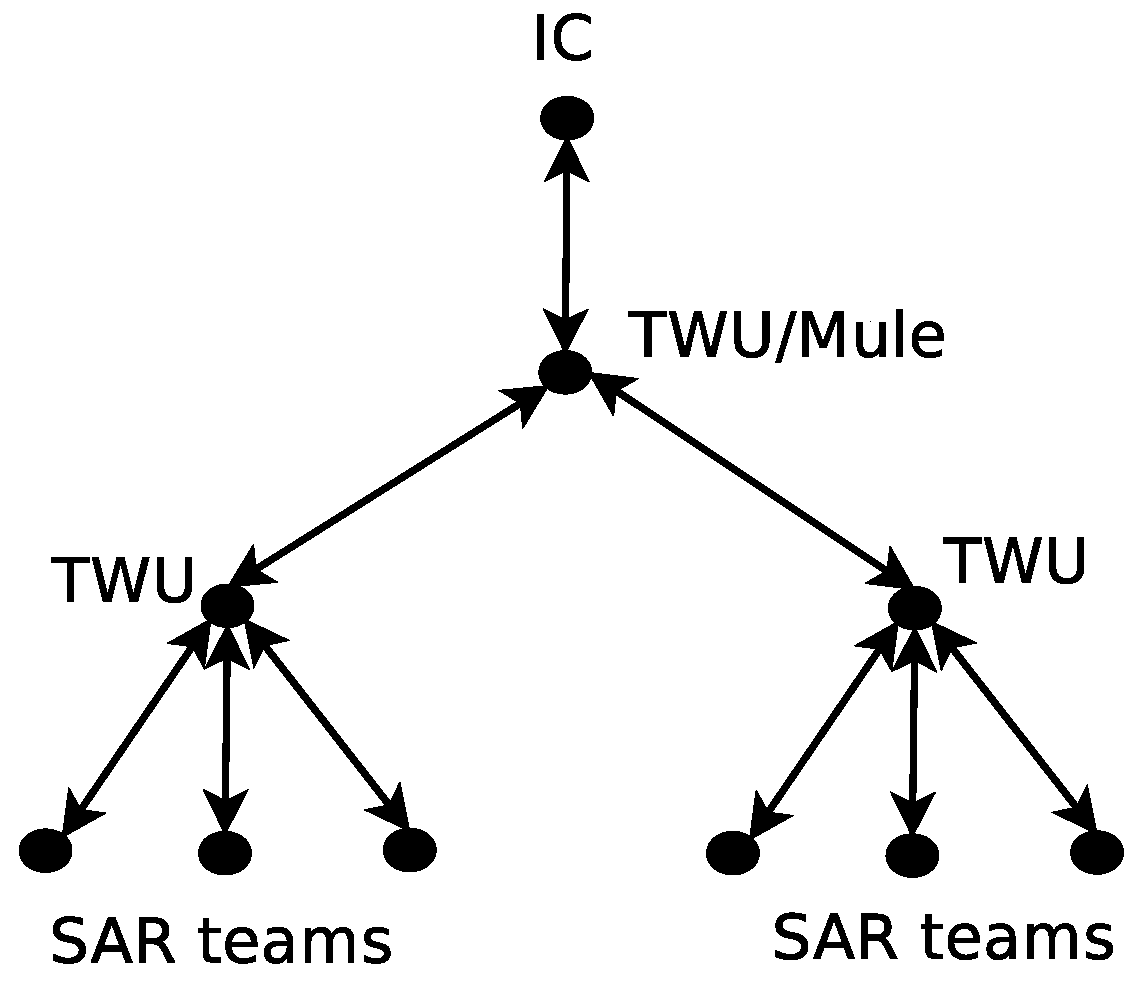
3.1. Flying Witness Units
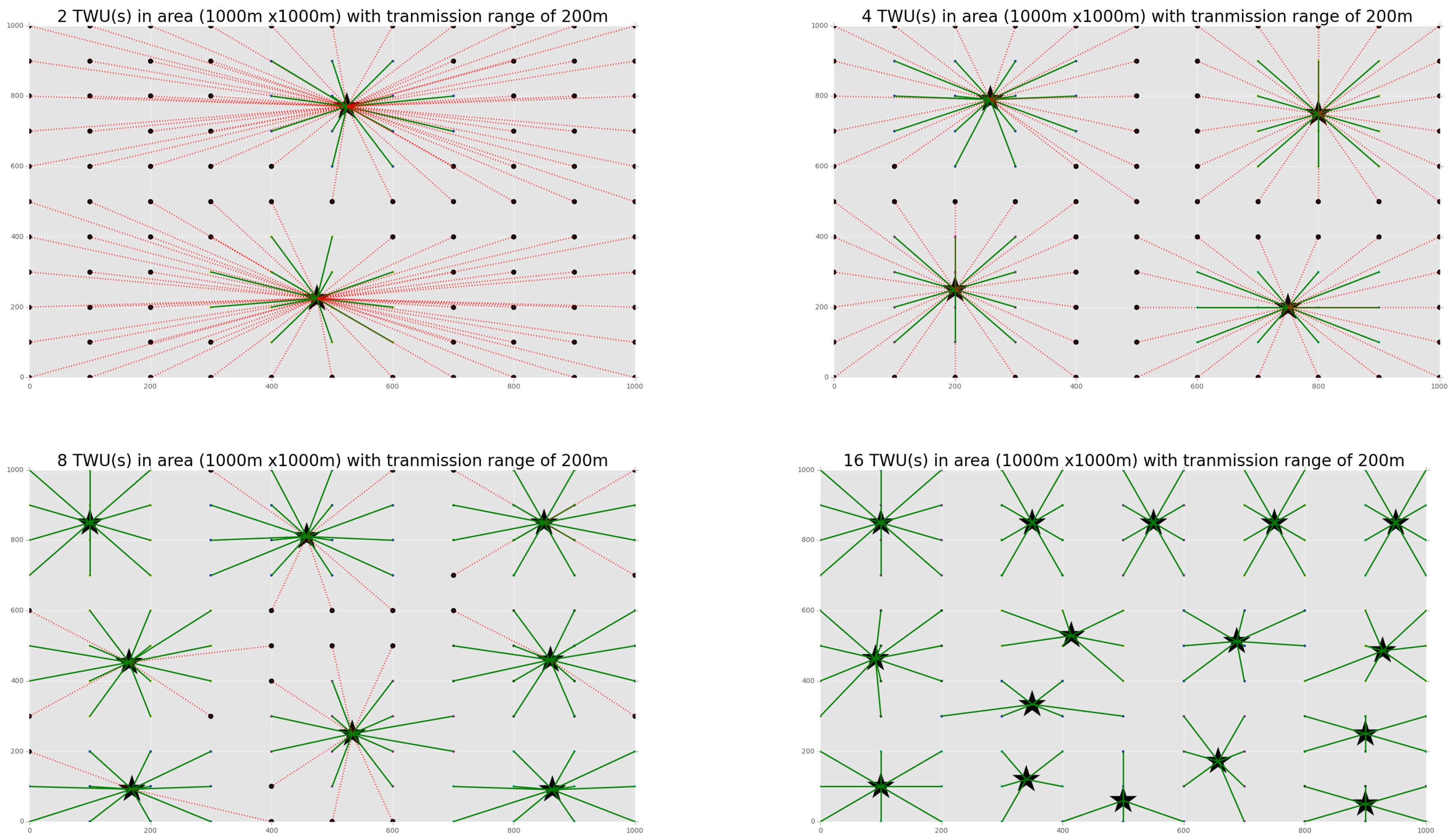
3.2. Initial Network Deployment
| Algorithm 1 Initial placement of TWUs in a given the emergency area |
 |
4. Network Deployment Model
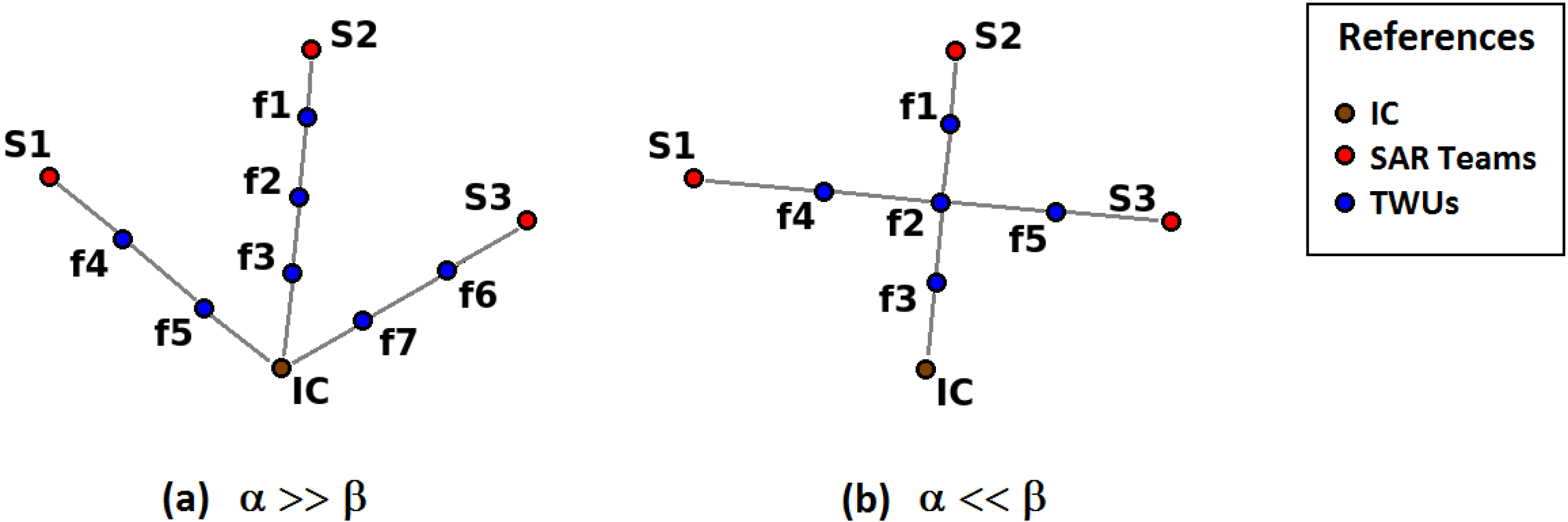
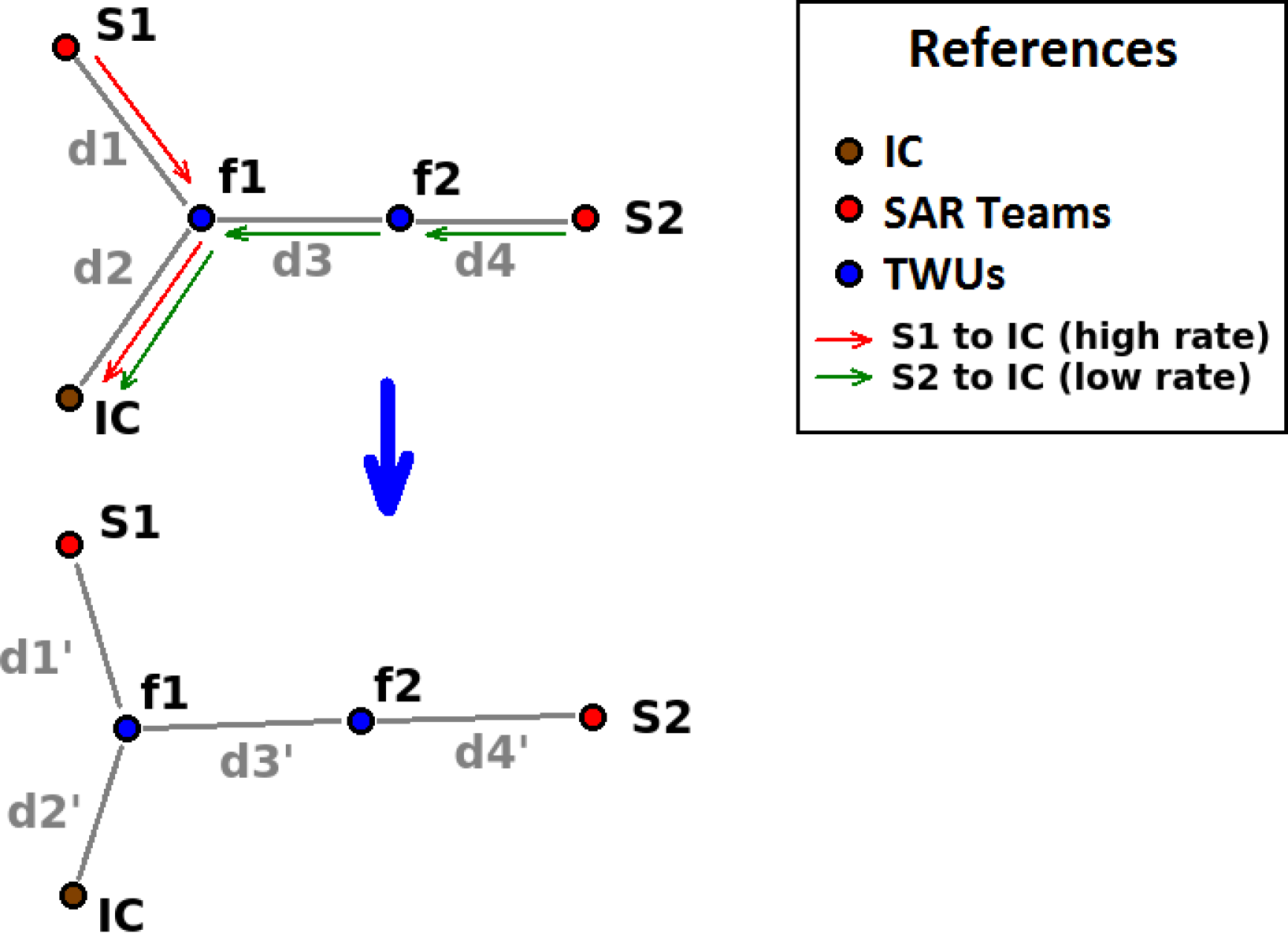
4.1. Adaptive Topology Based on Power Consumption
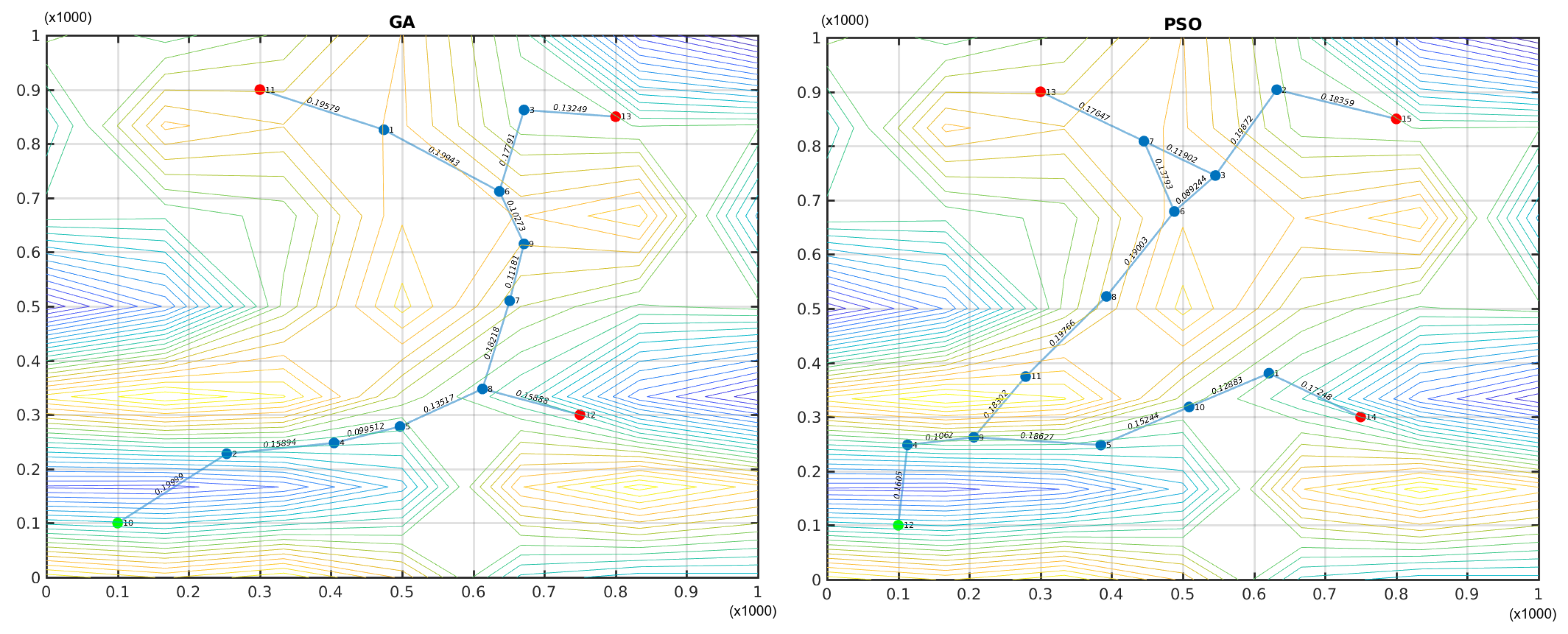
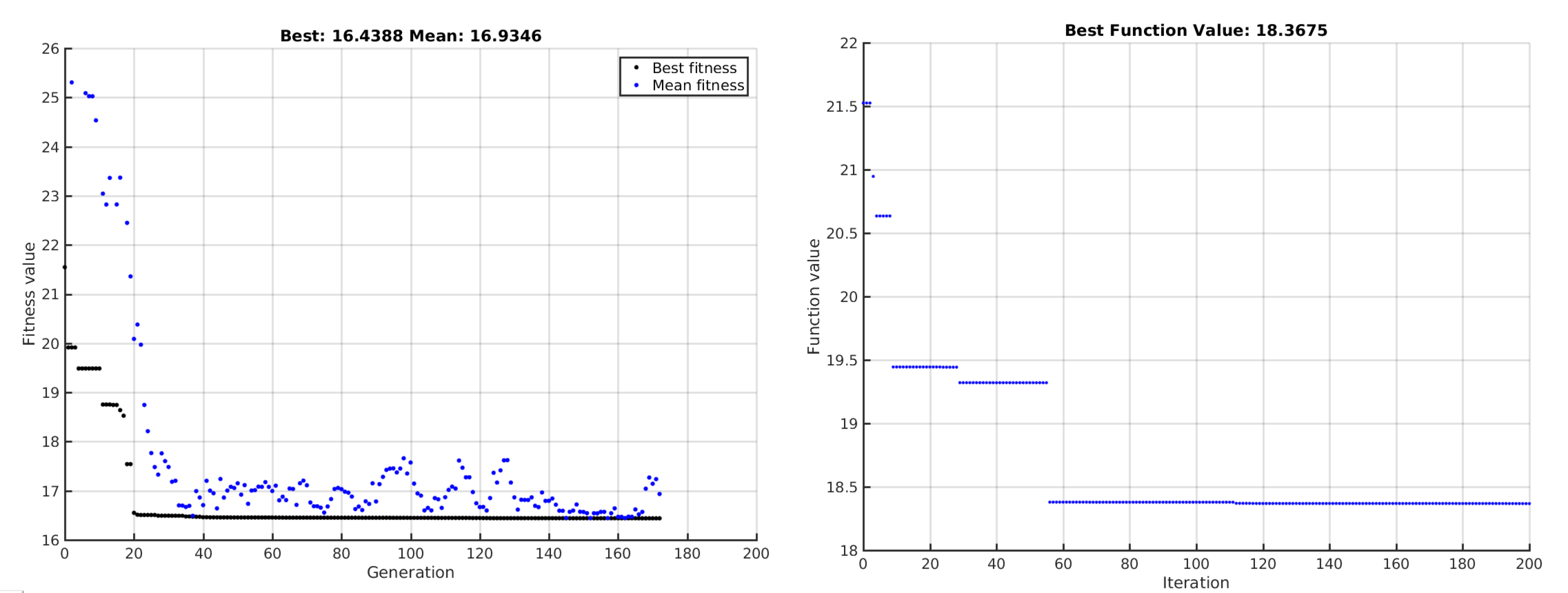
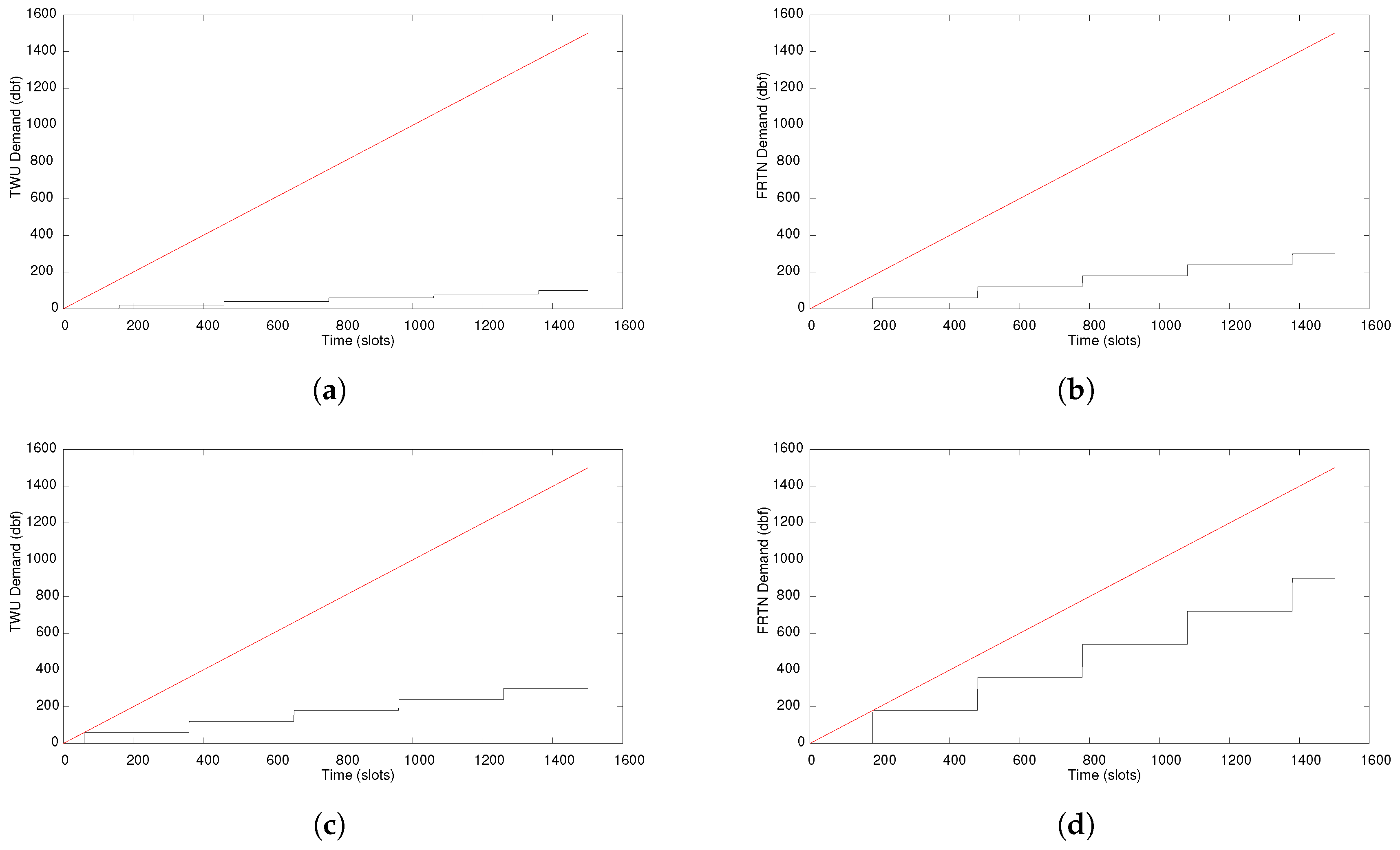
4.2. Performance Evaluation
5. Real-Time Analysis
5.1. Analysis of a Flying Real-Time Network
| Algorithm 2 Chetto algorithm for modifying message release times |
For modifying the release times:
|
| Algorithm 3 Chetto algorithm for modifying message deadlines |
For modifying the deadlines:
|
5.2. Computing the Scheduling Condition
6. Discussion
- Each unit is independent and works on its own area.
- Each unit is independent, but it can work on overlapping areas (to decrease transmission time).
- Each unit can work on overlapping areas and it can also interact with an FWU in its neighborhood.
- Each unit works collaboratively and it is part of a large FRTN.
7. Conclusions and Future Work
Author Contributions
Funding
Conflicts of Interest
References
- Ochoa, S.F.; Santos, R. Human-centric wireless sensor networks to improve information availability during urban search and rescue activities. Inf. Fusion 2015, 22, 71–84. [Google Scholar] [CrossRef]
- Manoj, B.S.; Baker, A.H. Communication challenges in emergency response. Commun. ACM 2007, 50, 51–53. [Google Scholar] [CrossRef]
- Monares, Á.; Ochoa, S.F.; Pino, J.A.; Herskovic, V.; Rodriguez-Covili, J.; Neyem, A. Mobile computing in urban emergency situations: Improving the support to firefighters in the field. Expert Syst. Appl. 2011, 38, 1255–1267. [Google Scholar] [CrossRef]
- Kumbhar, A.; Güvenç, I. A comparative study of land mobile radio and lte-based public safety communications. In Proceedings of the 2015 SoutheastCon, Fort Lauderdale, FL, USA, 9–12 April 2015; pp. 1–8. [Google Scholar] [CrossRef]
- Bradler, D.; Schiller, B.; Aitenbichler, E.; Liebau, N. Towards a distributed crisis response communication system. In Proceedings of the 6th International Information Systems for Crisis Response and Management (ISCRAM) Conference, Gothenburg, Sweden, 10–13 May 2009. [Google Scholar]
- Arimura, S.; Uchida, N.; Shibata, Y. Self Power Supplied Micro Wireless Ballooned Network for Disaster Recovery. In Proceedings of the Advanced Information Networking and Applications Workshops (WAINA), Barcelona, Spain, 25–28 March 2013; pp. 255–260. [Google Scholar] [CrossRef]
- Gomez, K.; Goratti, L.; Rasheed, T.; Reynaud, L. Enabling disaster-resilient 4G mobile communication networks. IEEE Commun. Mag. 2014, 52, 66–73. [Google Scholar] [CrossRef]
- Herlich, M.; Yamada, S. Motivation for a step-by-step guide to set up wireless disaster recovery networks. In Proceedings of the 2015 2nd International Conference on Information and Communication Technologies for Disaster Management (ICT-DM), Rennes, France, 30 November–2 December 2015; pp. 64–70. [Google Scholar] [CrossRef]
- Toro, J.; de Moura, F.S.; Pedroso, F.F.; Marques, F. Avaliacao de Perdas e Danos: Inundacoes e Deslizamentos na Regiao Serrana do Rio de Janeiro; Technical Report; World Bank: Washington, DC, USA, 2012. [Google Scholar]
- Hardy, K.; Comfort, L.K. Dynamic decision processes in complex, high-risk operations: The Yarnell Hill Fire, June 30, 2013. Saf. Sci. 2015, 71(Part A), 39–47. [Google Scholar] [CrossRef]
- Santos, R.; Mosse, D.; Znati, T.; Comfort, L. Design and implementation of a Witness Unit for opportunistic routing in tsunami alert scenarios. Saf. Sci. 2016, 90, 75–83. [Google Scholar] [CrossRef]
- Santos, R.M.; Orozco, J.; Mosse, D.; Petrucci, V.; Ochoa, S.F.; Meseguer, R. Flying Real-Time Network for Disaster Assistance. In Proceedings of the International Conference on Ubiquitous Computing and Ambient Intelligence, Philadelphia, PA, USA, 7–10 November 2017; Springer: Cham, Switzerland, 2017; pp. 591–602. [Google Scholar] [CrossRef]
- Bekmezci, İ.; Sahingoz, O.K.; Temel, Ş. Flying Ad-Hoc Networks (FANETs): A survey. Ad Hoc Netw. 2013, 11, 1254–1270. [Google Scholar] [CrossRef]
- Mileti, D. (Ed.) Disasters by Design: A Reassessment of Natural Hazards in the United States; The National Academies Press: Washington, DC, USA, 1999. [Google Scholar]
- Gibson, J.D. land mobile radio and professional mobile radio: Emergency first responders communication. In Mobile Communications Handbook, 3rd ed.; CRC Press: Boca Raton, FL, USA, 2013; pp. 513–526. [Google Scholar]
- The Government Accountability Office (GAO). Emergency Communication: Improved Procurement of Land Mobile Radios Could Enhance Interoperability and Cut Costs; Report to Congressional Requesters; GAO: Washington, DC, USA, 2016; pp. 1–48.
- Monares, Á.; Ochoa, S.F.; Santos, R.; Orozco, J.; Meseguer, R. Modeling IoT-based solutions using human-centric wireless sensor networks. Sensors 2014, 14, 15687–15713. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Bretmersky, S.C.; Bishop, W.D.; Dailey, J.E.; Chevalier, C.T. Communications Technology Assessment for the Unmanned Aircraft System (UAS) Control and Non-Payload Communications (CNPC) Link; Technical Report; NASA: Washington, DC, USA, 2014. [Google Scholar]
- Jimenez-Pacheco, A.; Bouhired, D.; Gasser, Y.; Zufferey, J.C.; Floreano, D.; Rimoldi, B. Implementation of a wireless mesh network of ultra light MAVs with dynamic routing. In Proceedings of the 2012 IEEE Globecom Workshops, Anaheim, CA, USA, 3–7 December 2012; pp. 1591–1596. [Google Scholar] [CrossRef]
- Rosati, S.; Krużelecki, K.; Heitz, G.; Floreano, D.; Rimoldi, B. Dynamic Routing for Flying Ad Hoc Networks. IEEE Trans. Veh. Technol. 2016, 65, 1690–1700. [Google Scholar] [CrossRef]
- Bupe, P.; Haddad, R.; Rios-Gutierrez, F. Relief and emergency communication network based on an autonomous decentralized UAV clustering network. In Proceedings of the 2015 SoutheastCon, Fort Lauderdale, FL, USA, 9–12 April 2015; pp. 1–8. [Google Scholar] [CrossRef]
- Marty, J.A. Vulnerability Analysis of the Mavlink Protocol for Command and Control of Unmanned Aircraft; Technical Report; DTIC Document; DTIC: Belvoir, VA, USA, 2013. [Google Scholar]
- Calamai, P.; Charalambous, C. Solving multifacility location problems involving euclidean distances. Nav. Res. Logist. Q. 1980, 27, 609–620. [Google Scholar] [CrossRef]
- Hartigan, J.A.; Wong, M.A. Algorithm AS 136: A K-Means Clustering Algorithm. J. R. Stat. Soc. Ser. C 1979, 28, 100–108. [Google Scholar] [CrossRef]
- Lloyd, S.P. Least squares quantization in pcm. IEEE Trans. Inf. Theory 1982, 28, 129–137. [Google Scholar] [CrossRef]
- Santos, R.; Urriza, J.; Santos, J.; Orozco, J. New methods for redistributing slack time in real-time systems: Applications and comparative evaluations. J. Syst. Softw. 2004, 69, 115–128. [Google Scholar] [CrossRef]
- Chetto, H.; Chetto, M. Some Results of the Earliest Deadline Scheduling Algorithm. IEEE Trans. Softw. Eng. 1989, 15, 1261–1269. [Google Scholar] [CrossRef]
- Serreli, N.; Lipari, G.; Bini, E. The Demand Bound Function Interface of Distributed Sporadic Pipelines of Tasks Scheduled by EDF. In Proceedings of the 2010 22nd Euromicro Conference on Real-Time Systems (ECRTS), Brussels, Belgium, 6–9 July 2010; pp. 187–196. [Google Scholar] [CrossRef]
- Sahingoz, O.K. Networking Models in Flying Ad-Hoc Networks (FANETs): Concepts and Challenges. J. Intell. Robot. Syst. 2014, 74, 513–527. [Google Scholar] [CrossRef]
- Frew, E.W.; Brown, T.X. Networking Issues for Small Unmanned Aircraft Systems. J. Intell. Robot. Syst. 2009, 54, 21–37. [Google Scholar] [CrossRef]
- Henkel, D.; Brown, T.X. On Controlled Node Mobility in DelayTolerant Networks of Unmanned Aerial Vehicles. In Proceedings of the International Symposium on Advance Radio Technolgoies (ISART), Boulder, CO, USA, 7–9 March 2006; pp. 7–9. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Node | Coordinates (X,Y) |
|---|---|
| IC | (0.1, 0.1) |
| SAR 1 | (0.3, 0.9) |
| SAR 2 | (0.75, 0.3) |
| SAR 3 | (0.8, 0.85) |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Micheletto, M.; Petrucci, V.; Santos, R.; Orozco, J.; Mosse, D.; Ochoa, S.F.; Meseguer, R. Flying Real-Time Network to Coordinate Disaster Relief Activities in Urban Areas. Sensors 2018, 18, 1662. https://doi.org/10.3390/s18051662
Micheletto M, Petrucci V, Santos R, Orozco J, Mosse D, Ochoa SF, Meseguer R. Flying Real-Time Network to Coordinate Disaster Relief Activities in Urban Areas. Sensors. 2018; 18(5):1662. https://doi.org/10.3390/s18051662
Chicago/Turabian StyleMicheletto, Matias, Vinicius Petrucci, Rodrigo Santos, Javier Orozco, Daniel Mosse, Sergio F. Ochoa, and Roc Meseguer. 2018. "Flying Real-Time Network to Coordinate Disaster Relief Activities in Urban Areas" Sensors 18, no. 5: 1662. https://doi.org/10.3390/s18051662
APA StyleMicheletto, M., Petrucci, V., Santos, R., Orozco, J., Mosse, D., Ochoa, S. F., & Meseguer, R. (2018). Flying Real-Time Network to Coordinate Disaster Relief Activities in Urban Areas. Sensors, 18(5), 1662. https://doi.org/10.3390/s18051662