Piezoelectric Actuator with Frequency Characteristics for a Middle-Ear Implant

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Materials and Methods
2.1. RW-Drive Middle-Ear Hearing Aid
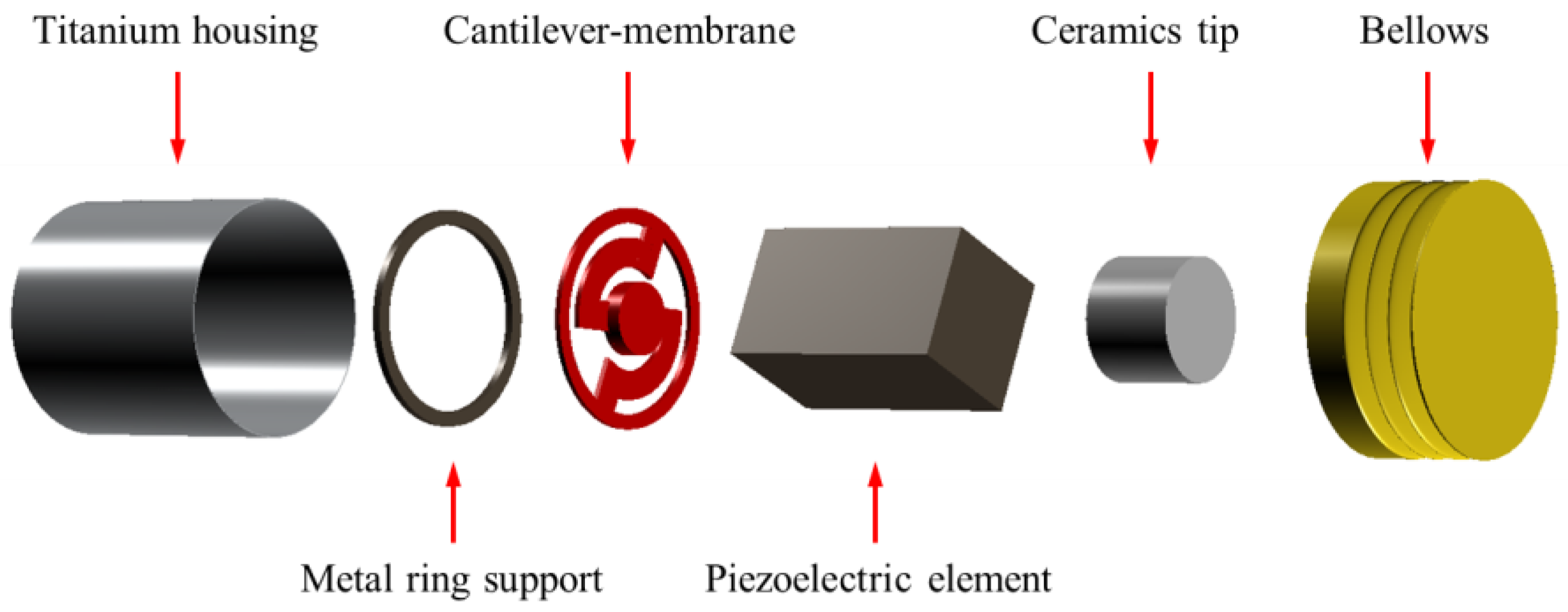
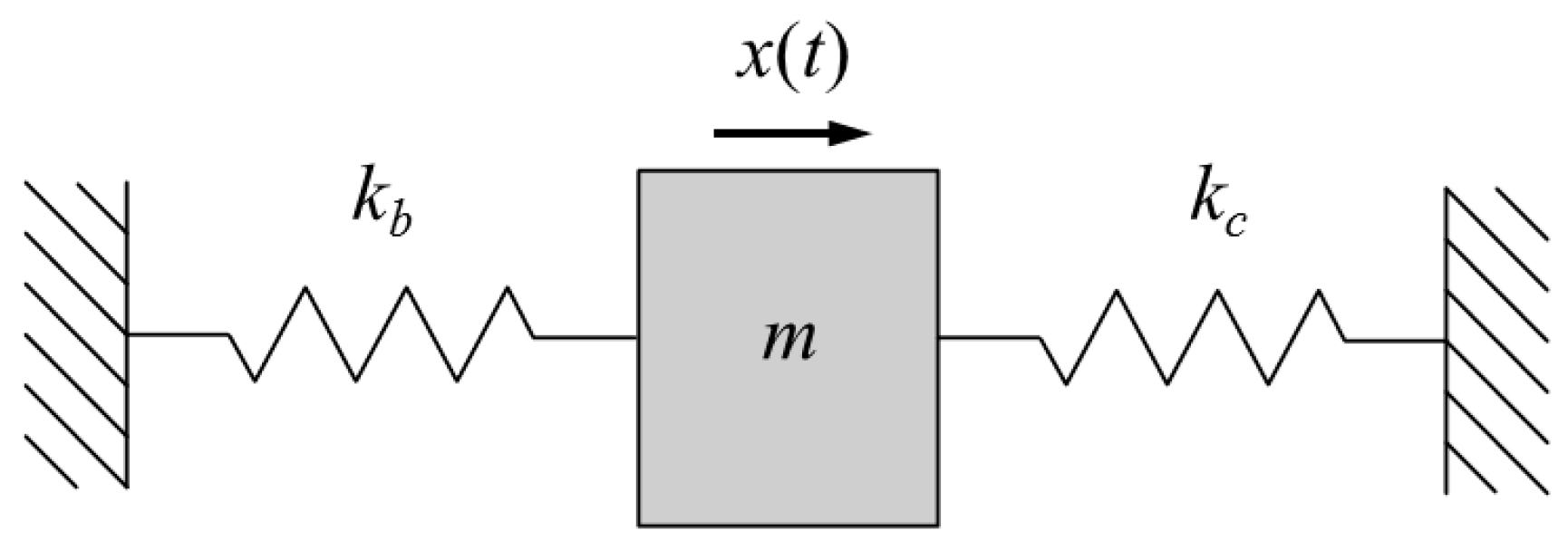
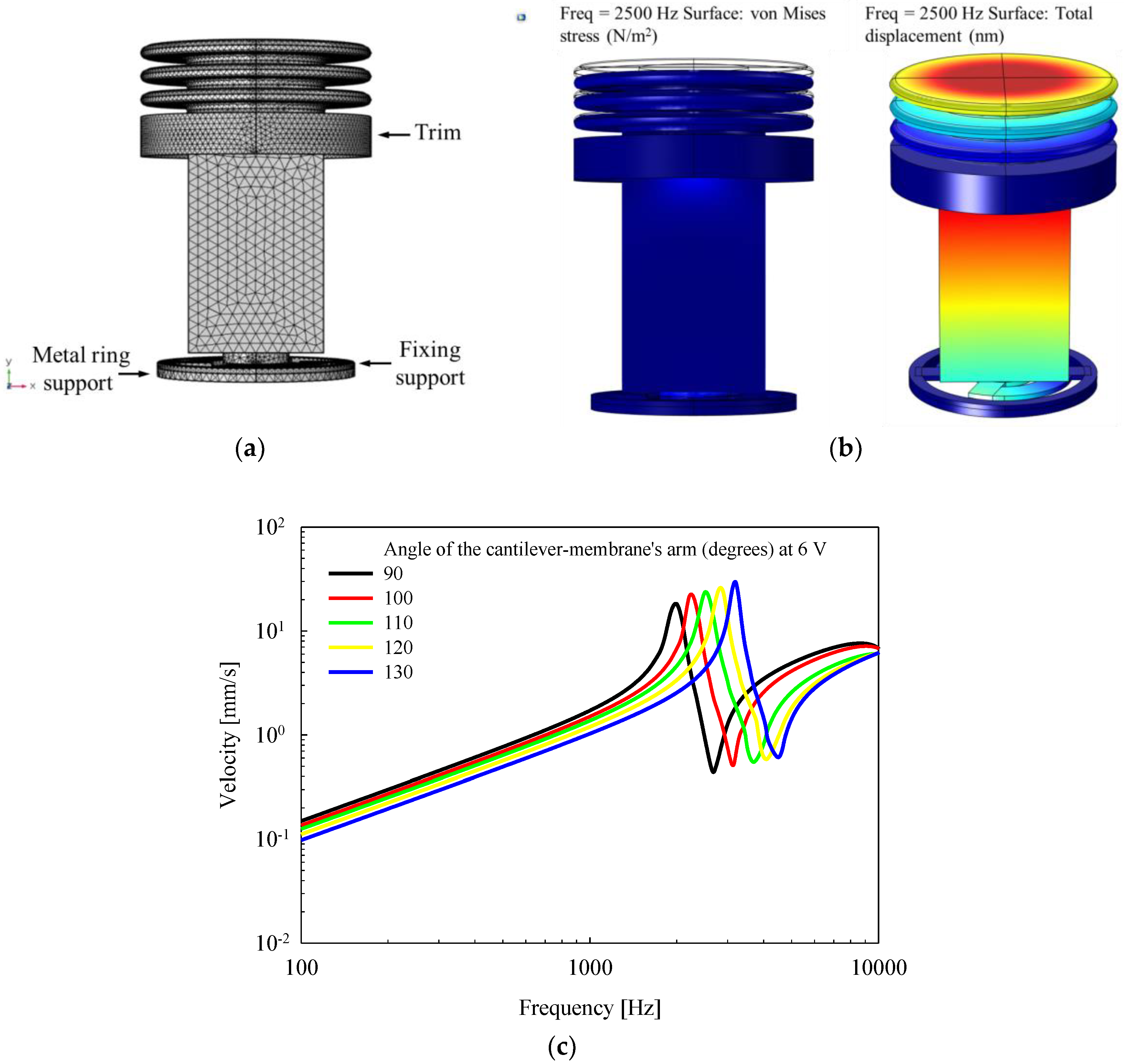
2.2. Design of the Piezoelectric Actuator
3. Results
3.1. Implementation of the Piezoelectric Actuator
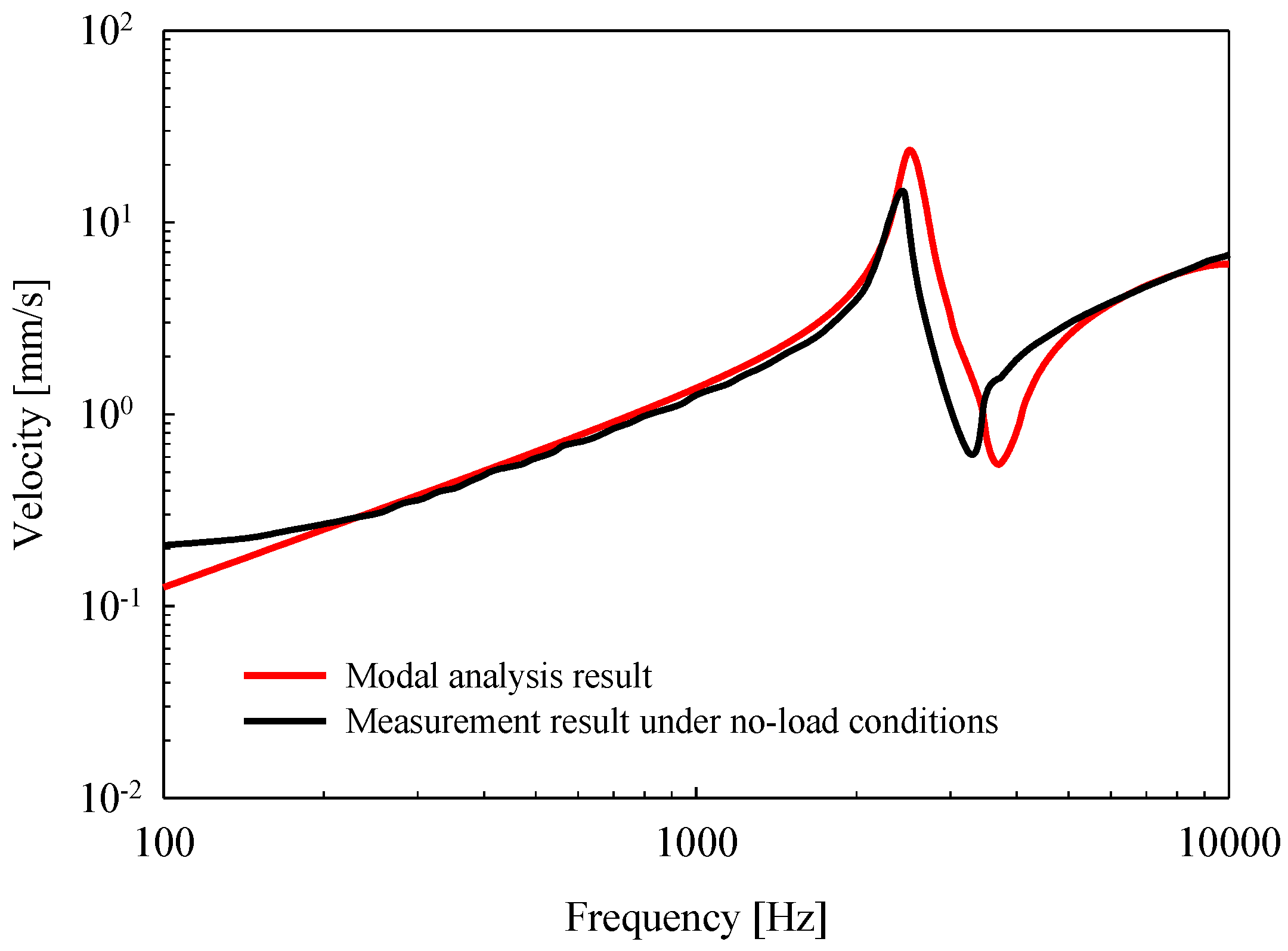
3.2. Measurement of Vibrational Characteristics
3.3. Cadaveric Experiment
4. Discussion and Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Backous, D.D.; Duke, W. Implantable middle ear hearing devices: Current state of technology and market challenge. Curr. Opin. Otolaryngol. Head Neck Surg. 2006, 14, 314–318. [Google Scholar] [CrossRef] [PubMed]
- Haynes, D.S.; Young, J.A.; Wanna, G.B.; Glasscock, M.E. Middle ear of implantable hearing devices: An overview. Trends Amplif. 2009, 13, 206–214. [Google Scholar] [CrossRef] [PubMed]
- Jenkins, H.A.; Niparko, J.K.; Slattery, W.H.; Neely, J.G.; Fredrickson, J.M. Otologics middle ear transducer ossicular stimulator: Performance results with varying degrees of sensorineural hearing loss. Acta Otolaryngol. 2004, 124, 391–394. [Google Scholar] [CrossRef] [PubMed]
- Mosnier, I.; Sterkers, O.; Bouccara, D.; Labassi, S.; Bebear, J.P.; Bordure, P.; Dubreuil, C.; Dumon, T.; Frachet, B.; Fraysse, B.; et al. Benefit of the Vibrant Soundbridge device in patients implanted for 5 to 8 years. Ear Hear. 2008, 29, 281–284. [Google Scholar] [CrossRef] [PubMed]
- Goode, R.L.; Rosenbaum, M.L.; Maniglia, A.J. The history and development of the implantable hearing aid. Otolaryngol. Clin. N. Am. 1995, 28, 1–16. [Google Scholar]
- Bankaitis, A.U.; Fredrickson, J.M. Otologics middle ear transducerTM (METTM) implantable hearing device: Rationale, technology, and design strategies. Trends Amplif. 2002, 6, 53–60. [Google Scholar] [CrossRef] [PubMed]
- Fisch, U.; Cremers, C.W.; Lenarz, T.; Weber, B.; Babighian, G.; Uziel, A.S.; Proops, D.W.; O’Connor, A.F.; Charachon, R.; Helms, J.; et al. Clinical experience with the Vibrant Soundbridge implant device. Otol. Neurotol. 2001, 22, 962–972. [Google Scholar] [CrossRef] [PubMed]
- Fraysse, B.; Lavieille, J.P.; Schmerber, S.; Enée, V.; Truy, E.; Vincent, C.; Vaneecloo, F.M.; Sterkers, O. A Multicenter Study of the Vibrant Soundbridge Middle Ear Implant: Early Clinical Results and Experience. Otol. Neurotol. 2001, 22, 952–961. [Google Scholar] [CrossRef] [PubMed]
- Spindel, J.H.; Lambert, P.R.; Ruth, R.A. The round window electromagnetic implantable hearing aid approach. Otolaryngol. Clin. N. Am. 1995, 28, 189–205. [Google Scholar]
- Arnold, A.; Kompis, M.; Candreia, C.; Pfiffner, F.; Häusler, R.; Stieger, C. The floating mass transducer at the round window: Direct transmission or bone conduction? Hear. Res. 2010, 263, 120–127. [Google Scholar] [CrossRef] [PubMed]
- Arnold, A.; Stieger, C.; Candreia, C.; Pfiffner, F.; Kompis, M. Factors improving the vibration transfer of the floating mass transducer at the round window. Otol. Neurotol. 2010, 31, 122–128. [Google Scholar] [CrossRef] [PubMed]
- Colletti, V.; Carner, M.; Colletti, L. TORP vs round window implant for hearing restoration of patients with extensive ossicular chain defect. Acta Otolaryngol. 2009, 129, 449–452. [Google Scholar] [CrossRef] [PubMed]
- Nakajima, H.H.; Dong, W.; Olson, E.S.; Rosowski, J.J.; Ravicz, M.E.; Merchant, S.N. Evaluation of round window stimulation using the floating mass transducer by intracochlear sound pressure measurements in human temporal bones. Otol. Neurotol. 2010, 31, 506–511. [Google Scholar] [CrossRef] [PubMed]
- Shimizu, Y.; Puria, S.; Goode, R.L. The floating mass transducer on the round window versus attachment to an ossicular replacement prosthesis. Otol. Neurotol. 2011, 32, 98–103. [Google Scholar] [CrossRef] [PubMed]
- Tringali, S.; Pergola, N.; Berger, P.; Dubreuil, C. Fully implantable hearing device with transducer on the round window as a treatment of mixed hearing loss. Auris Nasus Larynx 2009, 36, 353–358. [Google Scholar] [CrossRef] [PubMed]
- Tringali, S.; Koka, K.; Deveze, A.; Holland, N.J.; Jenkins, H.A.; Tollin, D.J. Round window membrane implantation with an active middle ear implant: A study of the effects on the performance of round window exposure and transducer tip diameter in human cadaveric temporal bones. Audiol. Neurotol. 2010, 15, 291–302. [Google Scholar] [CrossRef] [PubMed]
- Channer, G.A.; Eshraghi, A.A.; Zhong, L.X. Middle Ear Implants: Historical and futuristic perspective. J. Otol. 2011, 6, 10–18. [Google Scholar] [CrossRef]
- Shin, D.H.; Cho, J.H. Design and development of a tri-coil bellows transducer for RW-drive implantable middle-ear hearing aid using FEA. IEEE/ASME Trans. Mechatron. 2018. [Google Scholar] [CrossRef]
- Takahashi, H.; Sando, I.; Takagi, A. Computer-aided three-dimensional reconstruction and measurement of the round window niche. Laryngoscope 1989, 99, 505–509. [Google Scholar] [CrossRef] [PubMed]
- Abajo, J.; Sanhueza, I.; Giron, L.; Manrique, M. Experience with the active middle ear implant in patients with moderate-to-severe mixed hearing loss: Indications and results. Otol. Neurotol. 2013, 34, 1373–1379. [Google Scholar] [CrossRef] [PubMed]
- Shin, D.H.; Seong, K.W.; Puria, S.; Lee, K.Y.; Cho, J.H. A tri-coil bellows-type round window transducer with improved frequency characteristics for middle-ear implants. Hear. Res. 2016, 341, 144–154. [Google Scholar] [CrossRef] [PubMed]
- Balachandran, B.; Magrab, E.B. Vibrations, 2nd ed.; Cengage Learning: Toronto, ON, Canada, 2009; ISBN 10 0534552064. [Google Scholar]
- ASTM F2504-05. Standard Practice for Describing System Output of Implantable Middle Ear Hearing Devices; ASTM International: West Conshohocken, PA, USA, 2014. [Google Scholar]









© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shin, D.H.; Cho, J.-H. Piezoelectric Actuator with Frequency Characteristics for a Middle-Ear Implant. Sensors 2018, 18, 1694. https://doi.org/10.3390/s18061694
Shin DH, Cho J-H. Piezoelectric Actuator with Frequency Characteristics for a Middle-Ear Implant. Sensors. 2018; 18(6):1694. https://doi.org/10.3390/s18061694
Chicago/Turabian StyleShin, Dong Ho, and Jin-Ho Cho. 2018. "Piezoelectric Actuator with Frequency Characteristics for a Middle-Ear Implant" Sensors 18, no. 6: 1694. https://doi.org/10.3390/s18061694
APA StyleShin, D. H., & Cho, J. -H. (2018). Piezoelectric Actuator with Frequency Characteristics for a Middle-Ear Implant. Sensors, 18(6), 1694. https://doi.org/10.3390/s18061694