Estimation of Temporal Gait Parameters Using a Human Body Electrostatic Sensing-Based Method

Abstract
:1. Introduction
2. Method
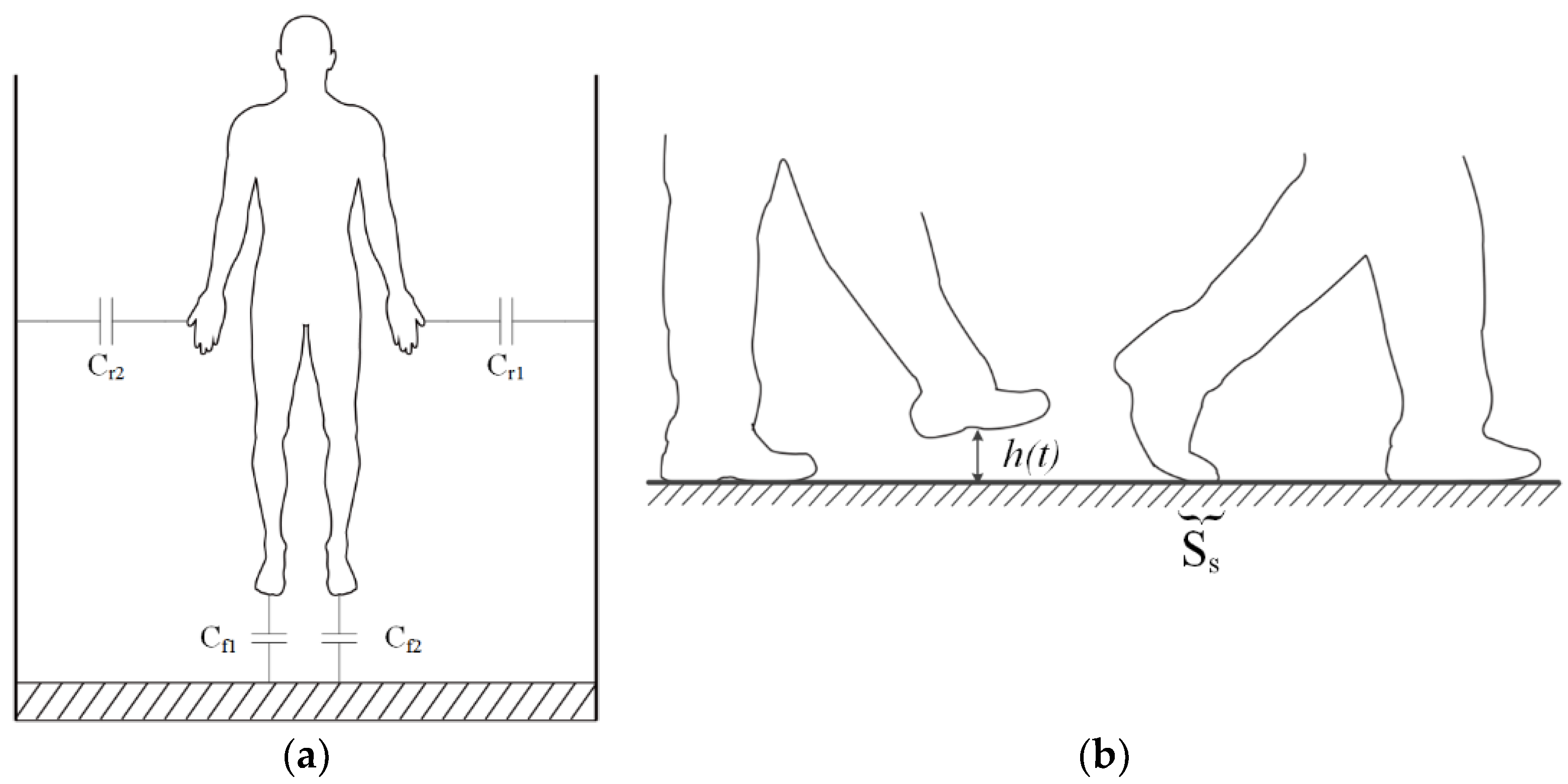
2.1. Principle of Electrostatic Field Sensing
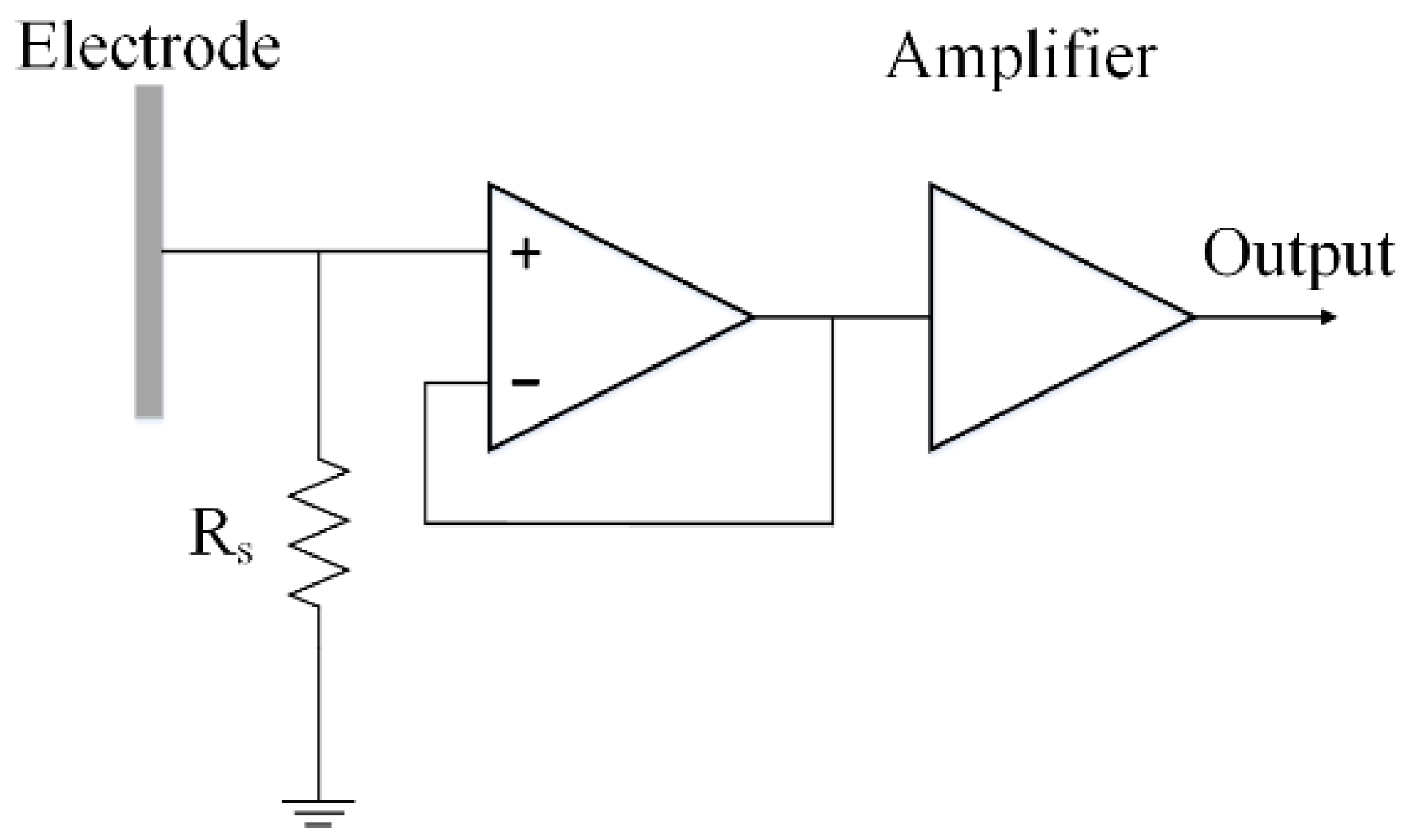
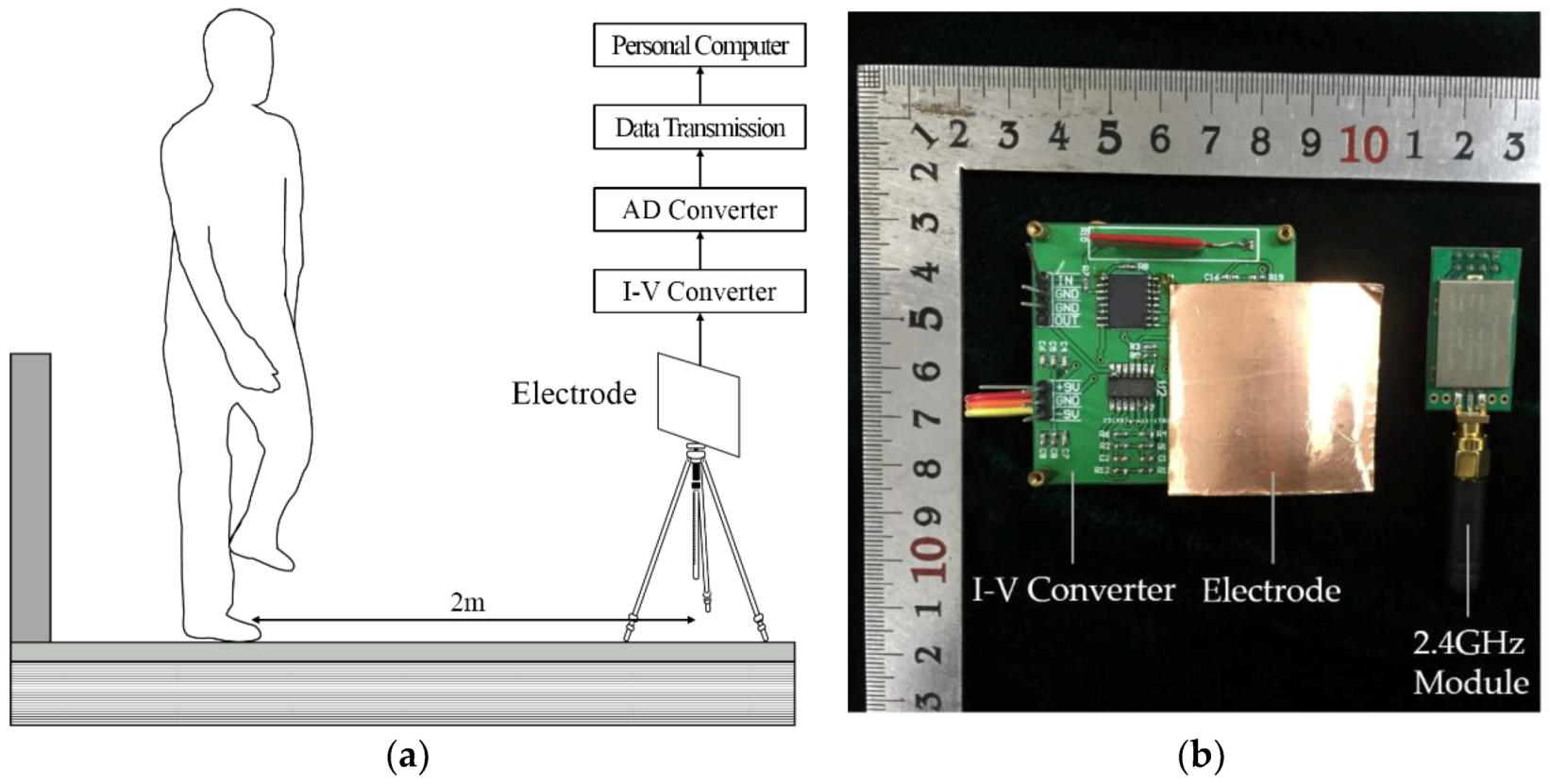
2.2. Instrumentation and Configurations
2.2.1. Electrostatic Field Sensing Measurement Installation
2.2.2. Foot Pressure Measurement System
2.3. Algorithm Development
2.3.1. Pressure-Based Foot Events Calculation Algorithm
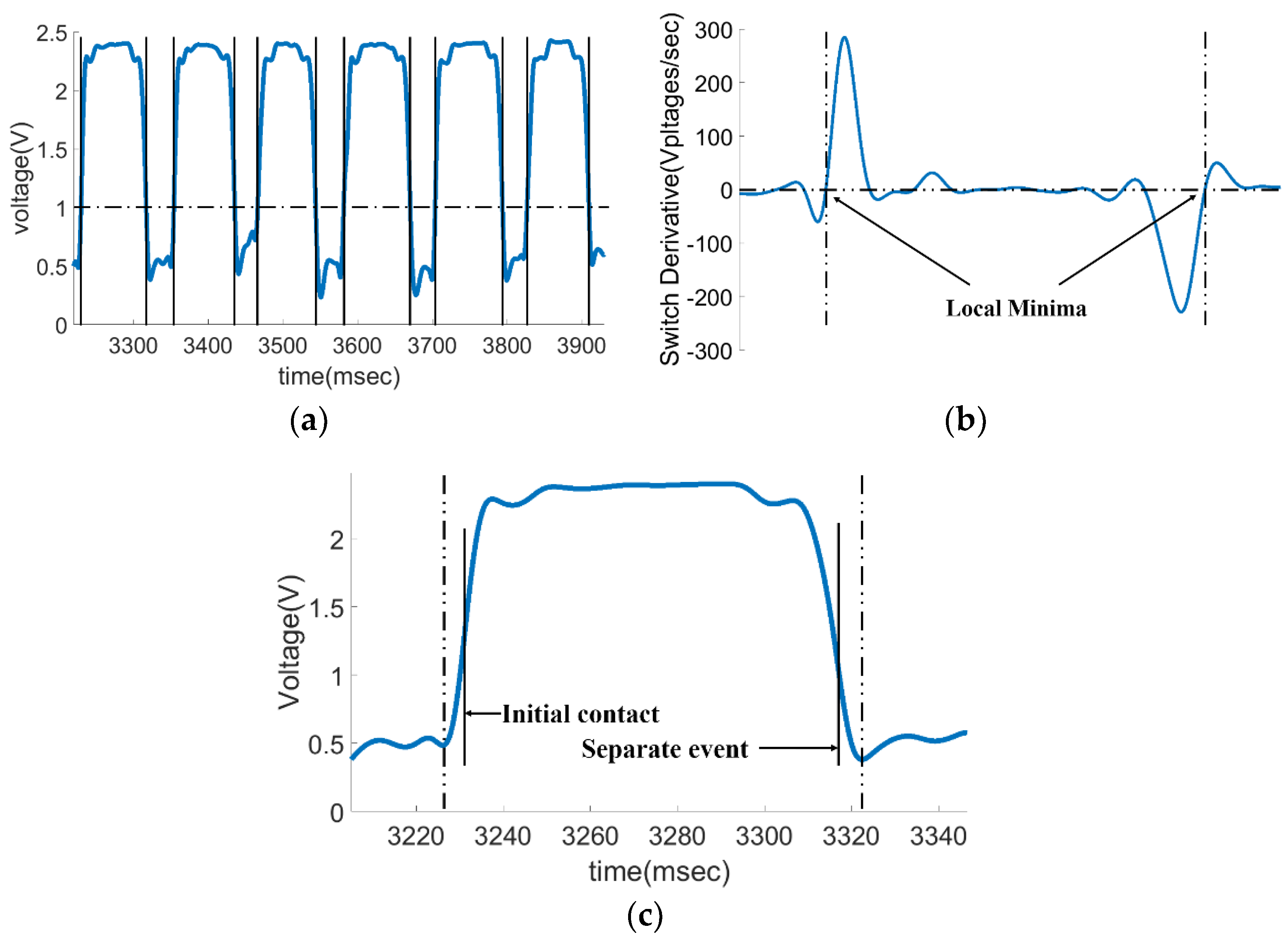
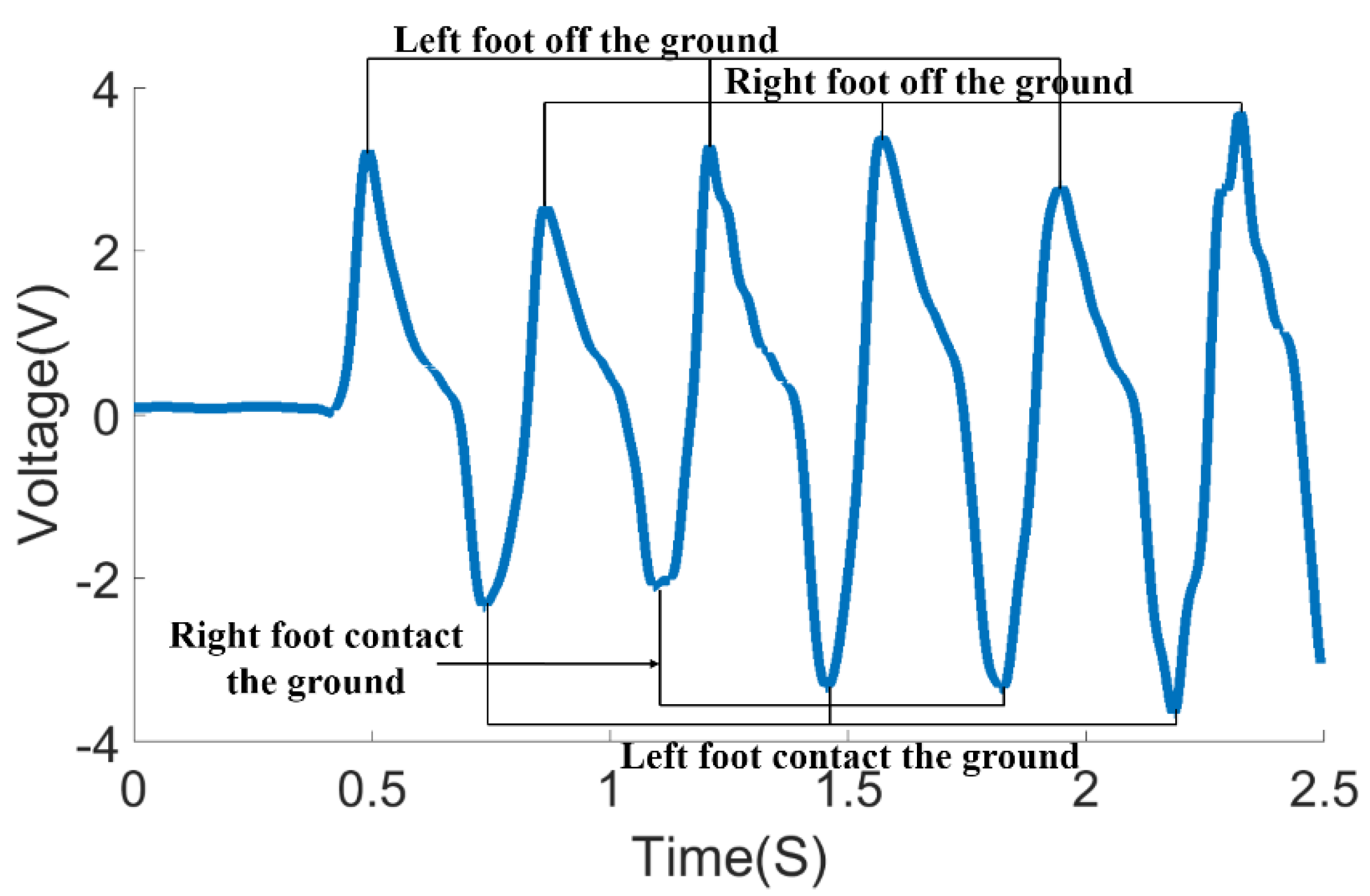
2.3.2. Electrostatic Signal-Based Foot Events Calculation Algorithm
2.4. Subjects
2.5. Experimental Conditions
2.6. Analysis
3. Results
4. Discussions
5. Conclusions
Author Contributions
Acknowledgments
Conflicts of Interest
References
- Mohammed, S.; Samé, A.; Oukhellou, L.; Kong, K.; Huo, W.; Amirat, Y. Recognition of gait cycle phases using wearable sensors. Rob. Auton. Syst. 2016, 75, 50–59. [Google Scholar] [CrossRef]
- Tunca, C.; Pehlivan, N.; Ak, N.; Arnrich, B.; Salur, G.; Ersoy, C. Inertial sensor-based robust gait analysis in non-hospital settings for neurological disorders. Sensors (Switzerland) 2017, 17, 825. [Google Scholar] [CrossRef] [PubMed]
- Alaqtash, M.; Yu, H.; Brower, R.; Abdelgawad, A.; Sarkodie-Gyan, T. Application of wearable sensors for human gait analysis using fuzzy computational algorithm. Eng. Appl. Artif. Intell. 2011, 24, 1018–1025. [Google Scholar] [CrossRef]
- Mannini, A.; Sabatini, A.M. Gait phase detection and discrimination between walking-jogging activities using hidden Markov models applied to foot motion data from a gyroscope. Gait Posture 2012, 36, 657–661. [Google Scholar] [CrossRef] [PubMed]
- Mariani, B.; Rouhani, H.; Crevoisier, X.; Aminian, K. Quantitative estimation of foot-flat and stance phase of gait using foot-worn inertial sensors. Gait Posture 2013, 37, 229–234. [Google Scholar] [CrossRef] [PubMed]
- Muro-de-la-Herran, A.; García-Zapirain, B.; Méndez-Zorrilla, A. Gait analysis methods: An overview of wearable and non-wearable systems, highlighting clinical applications. Sensors (Switzerland) 2014, 14, 3362–3394. [Google Scholar] [CrossRef] [PubMed]
- Abdul Razak, A.H.; Zayegh, A.; Begg, R.K.; Wahab, Y. Foot plantar pressure measurement system: A review. Sensors (Switzerland) 2012, 12, 9884–9912. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Wearing, S.C.; Reed, L.F.; Urry, S.R. Agreement between temporal and spatial gait parameters from an instrumented walkway and treadmill system at matched walking speed. Gait Posture 2013, 38, 380–384. [Google Scholar] [CrossRef] [PubMed]
- González, I.; Fontecha, J.; Hervás, R.; Bravo, J. Estimation of Temporal Gait Events from a Single Accelerometer through the Scale-Space Filtering Idea. J. Med. Syst. 2016, 40, 1–10. [Google Scholar] [CrossRef] [PubMed]
- Gouwanda, D.; Gopalai, A.A.; Khoo, B.H. A Low Cost Alternative to Monitor Human Gait Temporal Parameters-Wearable Wireless Gyroscope. IEEE Sens. J. 2016, 16, 9029–9035. [Google Scholar] [CrossRef]
- Wentink, E.C.; Schut, V.G.H.; Prinsen, E.C.; Rietman, J.S.; Veltink, P.H. Detection of the onset of gait initiation using kinematic sensors and EMG in transfemoral amputees. Gait Posture 2014, 39, 391–396. [Google Scholar] [CrossRef] [PubMed]
- Boutaayamou, M.; Denoël, V.; Brüls, O.; Demonceau, M.; Maquet, D.; Forthomme, B.; Croisier, J.L.; Schwartz, C.; Verly, J.G.; Garraux, G. Algorithm for Temporal Gait Analysis Using Wireless Foot-Mounted Accelerometers. In International Joint Conference on Biomedical Engineering Systems and Technologies; Springer: Cham, Switzerland, 2016; pp. 236–254. [Google Scholar]
- Ngo, T.T.; Makihara, Y.; Mukaigawa, Y.; Mukaigawa, Y.; Yagi, Y. Similar gait action recognition using an inertial sensor. Pattern Recognit. 2015, 48, 1289–1301. [Google Scholar] [CrossRef]
- Washabaugh, E.P.; Kalyanaraman, T.; Adamczyk, P.G.; Claflin, E.S.; Krishnan, C. Validity and repeatability of inertial measurement units for measuring gait parameters. Gait Posture 2017, 55, 87–93. [Google Scholar] [CrossRef] [PubMed]
- González, I.; López-Nava, I.H.; Fontecha, J.; Muñoz-Meléndez, A.; Pérez-SanPablo, A.I.; Quiñones-Urióstegui, I. Comparison between passive vision-based system and a wearable inertial-based system for estimating temporal gait parameters related to the GAITRite electronic walkway. J. Biomed. Inform. 2016, 62, 210–223. [Google Scholar] [CrossRef] [PubMed]
- Caldas, R.; Mundt, M.; Potthast, W.; Buarque de Lima Neto, F.; Markert, B. A systematic review of gait analysis methods based on inertial sensors and adaptive algorithms. Gait Posture 2017, 57, 204–210. [Google Scholar] [CrossRef] [PubMed]
- Bötzel, K.; Marti, F.M.; Rodríguez, M.Á.C.; Plate, A.; Vicente, A.O. Gait recording with inertial sensors—How to determine initial and terminal contact. J. Biomech. 2016, 49, 332–337. [Google Scholar] [CrossRef] [PubMed]
- Khandelwal, S.; Wickström, N. Novel methodology for estimating Initial Contact events from accelerometers positioned at different body locations. Gait Posture 2018, 59, 278–285. [Google Scholar] [CrossRef] [PubMed]
- Mertz, L. Convergence Revolution Comes to Wearables: Multiple Advances are Taking Biosensor Networks to the Next Level in Health Care. IEEE Pulse 2016, 7, 13–17. [Google Scholar] [CrossRef] [PubMed]
- Yang, S.; Zhang, J.T.; Novak, A.C.; Brouwer, B.; Li, Q. Estimation of spatio-temporal parameters for post-stroke hemiparetic gait using inertial sensors. Gait Posture 2013, 37, 354–358. [Google Scholar] [CrossRef] [PubMed]
- Toebes, M.J.; Hoozemans, M.J.; Furrer, R.; Dekker, J.; van Dieën, J.H. Associations between measures of gait stability, leg strength and fear of falling. Gait Posture 2015, 41, 76–80. [Google Scholar] [CrossRef] [PubMed]
- Anwary, A.R.; Yu, H.; Vassallo, M. Optimal Foot Location for Placing Wearable IMU Sensors and Automatic Feature Extraction for Gait Analysis. IEEE Sens. J. 2018, 18, 2555–2567. [Google Scholar] [CrossRef]
- Taborri, J.; Palermo, E.; Rossi, S.; Cappa, P. Gait partitioning methods: A systematic review. Sensors (Switzerland) 2016, 16, 66. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Kurita, K.; Fujii, Y.; Shimada, K. A new technique for touch sensing based on measurement of current generated by electrostatic induction. Sens. Actuators A Phys. 2011, 170, 66–71. [Google Scholar] [CrossRef]
- Chen, X.; Zheng, Z.; Cui, Z.; Zheng, W. A novel remote sensing technique for recognizing human gait based on the measurement of induced electrostatic current. J. Electrostat. 2012, 70, 105–110. [Google Scholar] [CrossRef]
- Chubb, J.N. A Standard proposed for assessing the electrostatic suitability of materials. J. Electrostat. 2007, 65, 607–610. [Google Scholar] [CrossRef]
- Castle, G.S.P. Contact charging between insulators. J. Electrostat. 1997, 40–41, 13–20. [Google Scholar] [CrossRef]
- Watanabe, H.; Ghadiri, M.; Matsuyama, T.; Long Ding, Y.; Pitt, K.G. New instrument for tribocharge measurement due to single particle impacts. Rev. Sci. Instrum. 2007, 78. [Google Scholar] [CrossRef]
- Gady, B.; Schleef, D.; Reifenberger, R.; Rimai, D.; DeMejo, L. Identification of electrostatic and van der Waals interaction forces between a micrometer-size sphere and a flat substrate. Phys. Rev. B 1996, 53, 8065–8070. [Google Scholar] [CrossRef]
- Forward, K.M.; Lacks, D.J.; Sankaran, R.M. Charge segregation depends on particle size in triboelectrically charged granular materials. Phys. Rev. Lett. 2009, 102, 1–4. [Google Scholar] [CrossRef] [PubMed]
- Ficker, T. Charging by walking. J. Phys. D Appl. Phys. 2006, 39, 410. [Google Scholar] [CrossRef]
- Kurita, K.; Ueta, S. A new motion control method for bipedal robot based on noncontact and nonattached human motion sensing technique. IEEE Trans. Ind. Appl. 2011, 47, 1022–1027. [Google Scholar] [CrossRef]
- Kurita, K. Novel non-contact and non-attached technique for detecting sports motion. Meas. J. Int. Meas. Confed. 2011, 44, 1361–1366. [Google Scholar] [CrossRef]
- Hausdorff, J.M.; Ladin, Z.; Wei, J.Y. Footswitch system for measurement of the temporal parameters of gait. J. Biomech. 1995, 28, 347–351. [Google Scholar] [CrossRef]
- Zhu, M.; Huang, Z.; Ma, C.; Li, Y. An objective balance error scoring system for sideline concussion evaluation using duplex kinect sensors. Sensors (Switzerland) 2017, 17, 2398. [Google Scholar] [CrossRef] [PubMed]
- Kluge, F.; Gaßner, H.; Hannink, J.; Pasluosta, C.; Klucken, J.; Eskofier, B.M. Towards mobile gait analysis: Concurrent validity and test-retest reliability of an inertial measurement system for the assessment of spatio-temporal gait parameters. Sensors (Switzerland) 2017, 17, 1522. [Google Scholar] [CrossRef] [PubMed]
- Wang, C.; Wang, X.; Long, Z.; Yuan, J.; Qian, Y.; Li, J. Estimation of temporal gait parameters using a wearable microphone-sensor-based system. Sensors (Switzerland) 2016, 16, 2167. [Google Scholar] [CrossRef] [PubMed]
- Qi, Y.; Soh, C.B.; Gunawan, E.; Low, K.S.; Thomas, R. Estimation of spatial-temporal gait parameters using a low-cost ultrasonic motion analysis system. Sensors (Switzerland) 2014, 14, 15371–15386. [Google Scholar] [CrossRef] [PubMed]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Gait Parameters | EFS Result | Foot Pressure Result | Pearson Coefficient r |
|---|---|---|---|
| Stance phase duration (Ts) | 741.83 ± 117.97 | 775.03 ± 125.68 | 0.98 |
| Swing phase duration (Tw) | 431.32 ± 94.12 | 396.58 ± 94.10 | 0.99 |
| Gait cadence (C) | 102.53 ± 15.34 | 102.66 ± 15.42 | 0.99 |
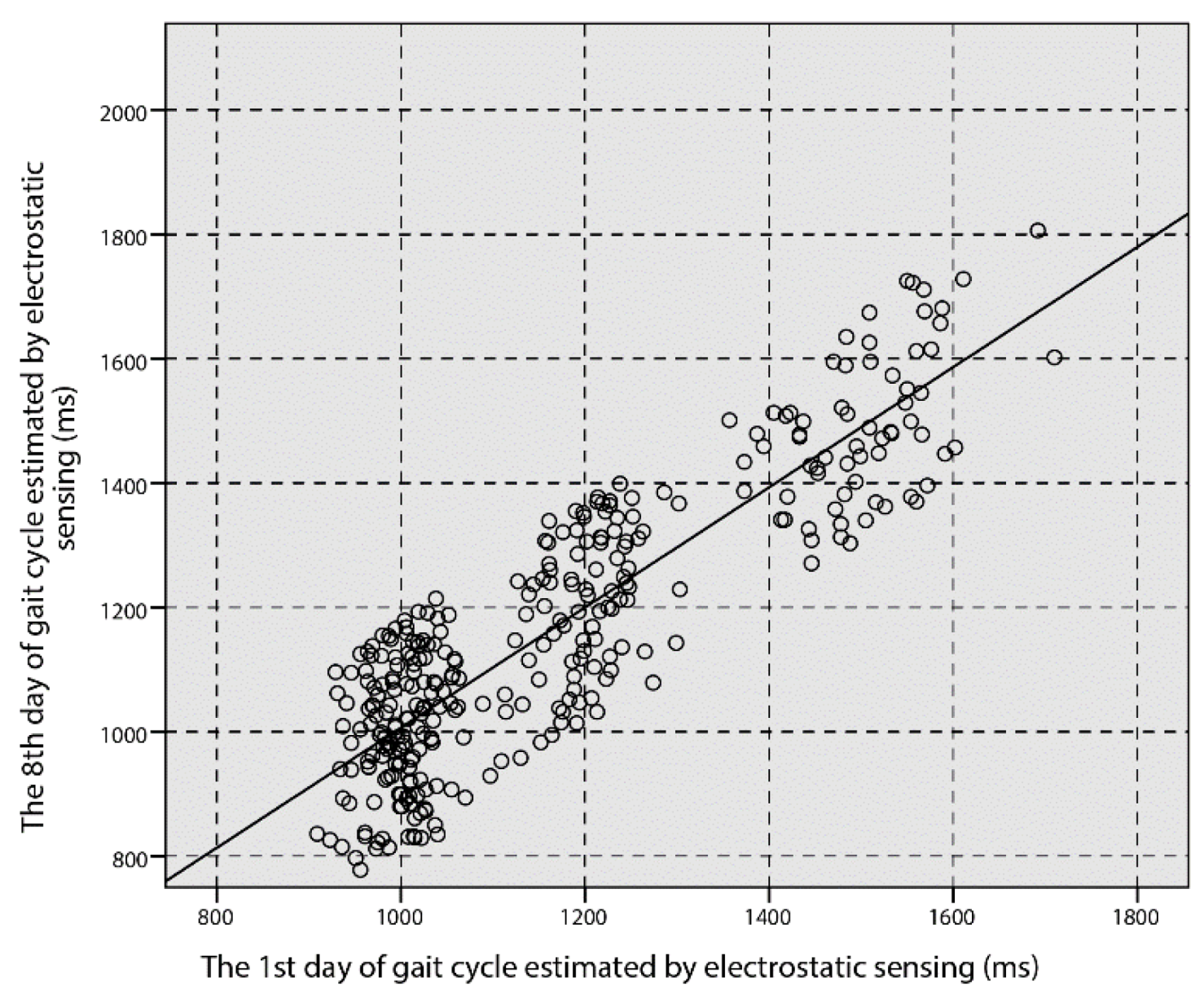
| Gait Parameters | Day 1 | Day 8 | ICC | p |
|---|---|---|---|---|
| Stance phase duration (Ts) | 741.83 ± 117.97 | 805.56 ± 120.64 | 0.86 | <0.001 |
| Swing phase duration (Tw) | 431.32 ± 94.12 | 458.79 ± 102.35 | 0.87 | <0.001 |
| Gait cadence (C) | 102.53 ± 15.34 | 95.23 ± 16.49 | 0.85 | <0.001 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, M.; Li, P.; Tian, S.; Tang, K.; Chen, X. Estimation of Temporal Gait Parameters Using a Human Body Electrostatic Sensing-Based Method. Sensors 2018, 18, 1737. https://doi.org/10.3390/s18061737
Li M, Li P, Tian S, Tang K, Chen X. Estimation of Temporal Gait Parameters Using a Human Body Electrostatic Sensing-Based Method. Sensors. 2018; 18(6):1737. https://doi.org/10.3390/s18061737
Chicago/Turabian StyleLi, Mengxuan, Pengfei Li, Shanshan Tian, Kai Tang, and Xi Chen. 2018. "Estimation of Temporal Gait Parameters Using a Human Body Electrostatic Sensing-Based Method" Sensors 18, no. 6: 1737. https://doi.org/10.3390/s18061737
APA StyleLi, M., Li, P., Tian, S., Tang, K., & Chen, X. (2018). Estimation of Temporal Gait Parameters Using a Human Body Electrostatic Sensing-Based Method. Sensors, 18(6), 1737. https://doi.org/10.3390/s18061737