1. Introduction
Artificial skin will be required more in the future as a substitute for human skin and as a part of the humanoid exterior of robots. The requisites for artificial skin are the material properties of flexibility, elasticity, and extensibility, and a high sensing ability for force and temperature. The former requires high tension and compression for sturdiness. The latter is related to haptic sensing, as human skin has five types of touch sensation: tactile, pressure sensation, algometry, warm, and cold [
1]. Current ordinary sensors have a unique sensitivity to forces that are applied normal to a touched material; however, they do not have sensitivity to a shear force. When we need to measure the shear force, strain gauges or piezoelectric elements must be added [
2,
3,
4,
5], making the sensor’s structure complicated and vulnerable to extrinsic mechanical forces. Therefore, it is significant to make the sensor more sensitive with a simple morphology. The sensing of shear force is effective in the case of rubbing some object, such as for example when measuring surface roughness [
6], the softness of a soft material such as a diaper [
7], or the case of a robot stroking a person’s head.
On the other hand, current ordinary robots require a lightweight battery. If the battery is not incorporated into the robot, electric wires connected to the outlet of an electric source are required, and can act as an obstacle. There have been proposed lightweight batteries, solar cells, etc. However, recently, batteries, including polymer batteries, have been developed. If the skin installed in a robot has a battery, the battery must be elastic and compressible in addition to being more lightweight. A battery made of rubber has been investigated [
8,
9]. However, the effects of compression and elongation on the conductivity properties have not been clarified. To answer these problems, a solar cell is proposed to be installed in a robot, usually in the form of a solid-state flat plate. Although flexible solar power generators have been investigated recently, including a conducting polymer [
10,
11,
12,
13,
14,
15,
16], they have remained within the realm of solid-state devices. Based on the above, the utilization of a rubber in batteries and solar cells is a significant step toward solving the problems related to the material dynamic properties of elasticity, compressibility, and weight.
In order to make the rubber utilized in batteries and solar cells more sensitive, as described above, we have proposed a lightweight hybrid skin (H-Skin) integrated with multiple functionalities of flexibility, elasticity, and compressibility, photovoltaics, and high sensing modalities for force and temperature for artificial human skin, humanoid skin, or the outer layer of robot skin in the first report [
17]. On this subject, we have investigated temperature susceptibility and challenged the sensing of various bodily surfaces related to shearing motion by dry-type magnetic compound fluid (MCF) rubber, as shown in
Appendix A, before the series of these present three reports. Dry-type MCF rubber means that the rubber was solidified in air without electrolytic polymerization. In contrast, electronic skin (E-Skin) has been proposed by integrating multiple functionalities of sensing modalities to force, temperature, and so on for sensitive skin, smart skin, or intelligent skin [
18]. The difference between H-skin and E-Skin is that the former has photovoltaic functionality, whereas the latter does not, as presented previously by the first report [
17]. Since H-Skin also has piezoelectricity, it can use solar power for self-sensing by utilizing the generated piezo effect. Piezoelectricity corresponds to the piezoelectric effect, which is the built-in voltage generated by the approaching of positive and negative ions, and is different from piezoresistivity, which means changes in resistance (piezoresistive resistance) when a voltage is applied under compression or elongation.
We have investigated H-Skin for its properties of photoelectricity (photovoltage and photocurrent) as a solar cell and built-in electricity (built-in voltage and built-in current) from its piezoelectricity by utilizing the MCF rubber used in the previous two reports [
17,
19]. MCF rubber is the elastic and compressible rubber included in the MCF, which is an intelligent fluid that is responsive to a magnetic field involving 10-nm Fe
3O
4 particles coated by oleic acid because of the compounding magnetic fluid (MF) and other metal particles, such as Fe, Ni, or Cu, on the order of 1 μm. MF is a significant factor in producing MCF rubber; the role of magnetic fluid (MF) corresponds to the one oleic acid coated around the Fe
3O
4 particle. The dielectric polarization of the oleic acid is significant. The dielectricity induces the built-in voltage and current, which is generated as another mechanism by the gap between A
− and D
+. The built-in electricity and photoexcitation are based on
p-type and
n-type semiconductors viewing in the isoprene molecules of NR-latex, oleic acid, water, and Ni particles, photosensitized dye molecules, and so on. By ionized
p-type and
n-type semiconductors, the former becomes an acceptor A, which is charged negatively to become A
-, and the latter becomes a donor D, which is charged positively to become D
+. In addition, the production of MCF rubber by the electrolytic polymerization is significant for solidification among the isoprene of the NR-latex particle and the oleic acid. This mechanism has been clarified by the previous report [
20]. The MCF rubber consisting of natural rubber (NR-latex) is solidified under the application of a magnetic field, and magnetic clusters combined by the aggregation of Fe
3O
4 and metal particles are formed along the direction of the magnetic field lines. The first report showed that MCF rubber can become a solar cell without dye or electrolytes. In general, ordinary organic thin solar cells have sensitized dye and electrolytes for photoexcitation by the oxidation–reduction reaction. In addition, the electrolytically polymerized MCF rubber involving the dye and electrolyte was also able to become a solar cell. These cases were the dry-type MCF rubber solar cell. The type includes another condition in which dye and electrolyte are poured on an MCF rubber dried in a drying machine, which was also able to become a solar cell in the second report. The first report showed the physical–chemical fabrication and principle of the dry-type solar cell, and clarified the effect of compression on its photoelectricity. In contrast, the second report dealt with the wet-type solar cell, which denotes pouring dye and electrolyte. The same physical–chemical fabrication and principle of the solar cell as in the dry-type MCF rubber solar cell were established in the wet-type cell. This clarified the effects of several experimental condition factors, namely, of the simultaneous existence of both compression and elongation on its photoelectricity and piezoelectricity, and the electrode location.
However, the electric charging of the MCF rubber has not been elucidated. Since electricity can be charged between A− and D+, MCF rubber can be proposed to create a feasible battery.
Therefore, in the present study, we clarify the electric charging of wet-type MCF rubber solar cells. Furthermore, the effects of compression and elongation on the electric charging are clarified. In addition, the MCF rubber without irradiation is found to have the function of electric charging, which corresponds to a battery without sensitized dye. Its effects of compression and elongation on the electric charging of the MCF rubber battery are also clarified.
2. Photovoltaics MCF Rubber Solar Cell
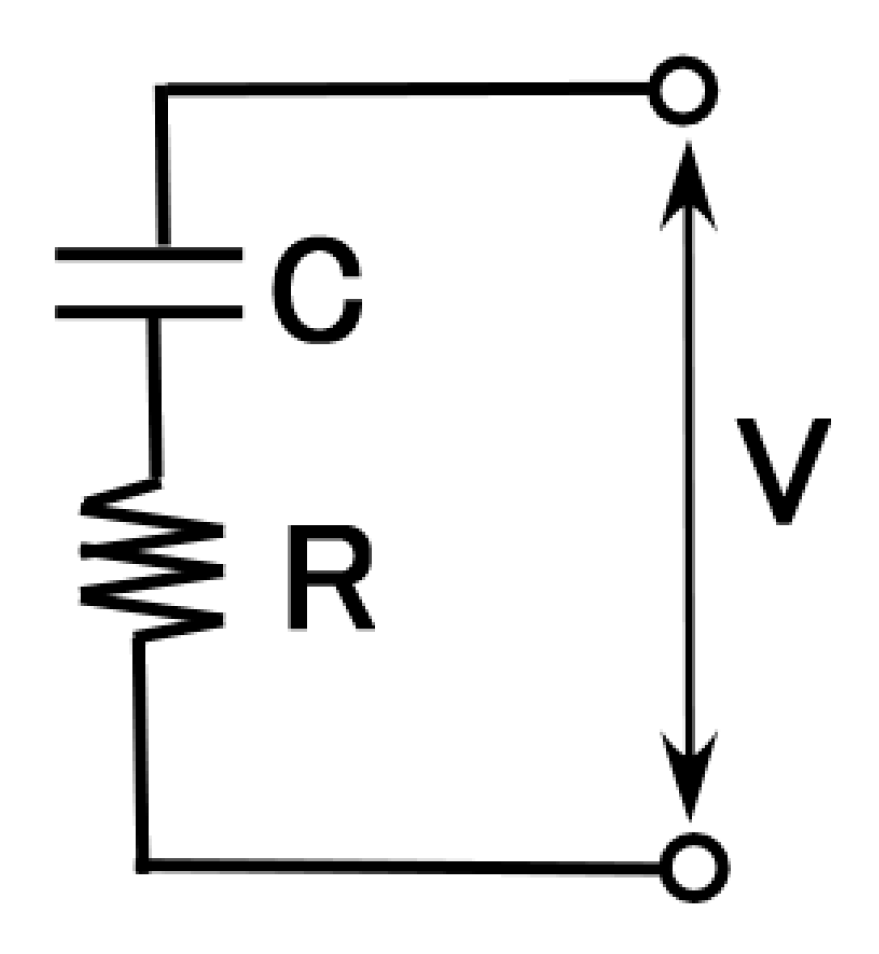
An ordinarily solar cell is evaluated with an equivalent electric circuit comprising a capacitor and resistor, as shown by
Figure 1. First, we investigate the resistance
R, and the total resistance of the solar cell in which there exists some internal resistances.
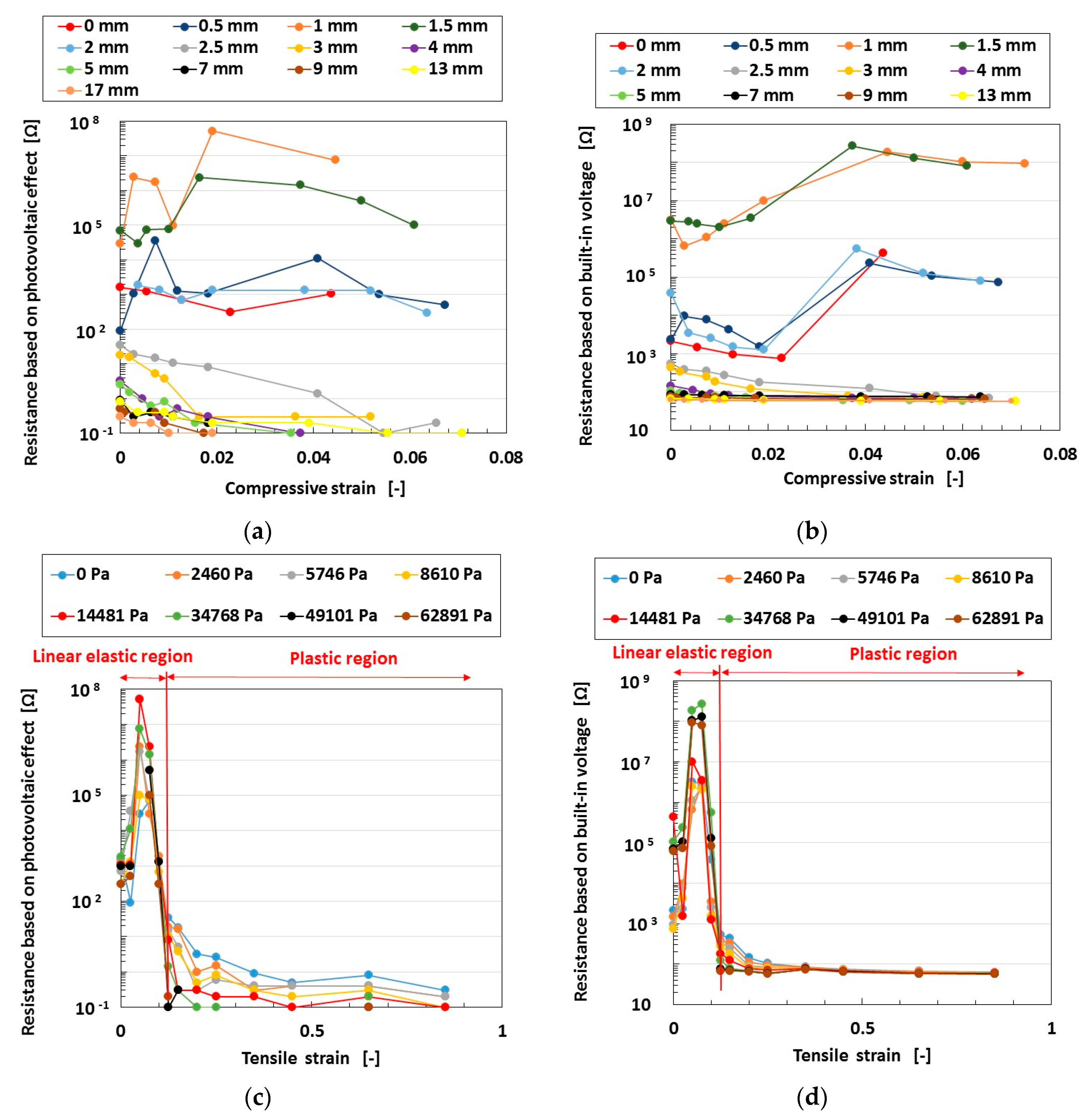
The experimental data of
R in a wet-type MCF rubber solar cell is shown in
Figure 2 under elongation and compression.
Figure 2a,b shows the amplitude of tension and
Figure 2c,d shows that of pressure. The experimental apparatus and procedure were the same as those used in the second report [
19]. In general, the voltage and current of the solar cell have both photo and built-in electricity. The former and the latter causes were explained previously in the second report. Therefore, resistance can be estimated to be divided between the two cases. At a lesser elongation, by compression, the photovoltaic resistance is almost constant; however, the built-in voltaic resistance increases. At a greater elongation, by compression, both resistances decrease or remain constant. On the other hand, by elongation, both resistances have a peak in the linear elastic region of the MCF rubber, and then decrease in the plastic region. In contrast, tunneling theory is applicable to the MCF rubber solar cell. The transfer of electric current over the potential barrier of the rubber under compression as a one-dimensional Schrödinger equation is easier because of the decreasing size of the gap of the insulator, as shown previously in the first report [
17]. From the equations presented in the report, the resistance
R of the MCF rubber solar cell is given by Equation (1) with a transmitted probability of
T, where
eEo is the applied voltage,
e is the elementary charge,
γ is the wave number presented by Equation (2),
ħ is
h/2π,
h is Planck’s constant,
m is the mass of the electron,
Vo is the potential energy at region
γ for each
i-ordered pair of regions fabricated with non-conductive rubber sandwiched by conductive materials, and
ε is the energy of the electron. At each
i-ordered pair of regions, the transmitted current is given as the denominator of the middle expression of Equation (1) and approximately evaluated as
Tout, which is
T at the outlet of
n pairs of regions through which the electrons transfer.
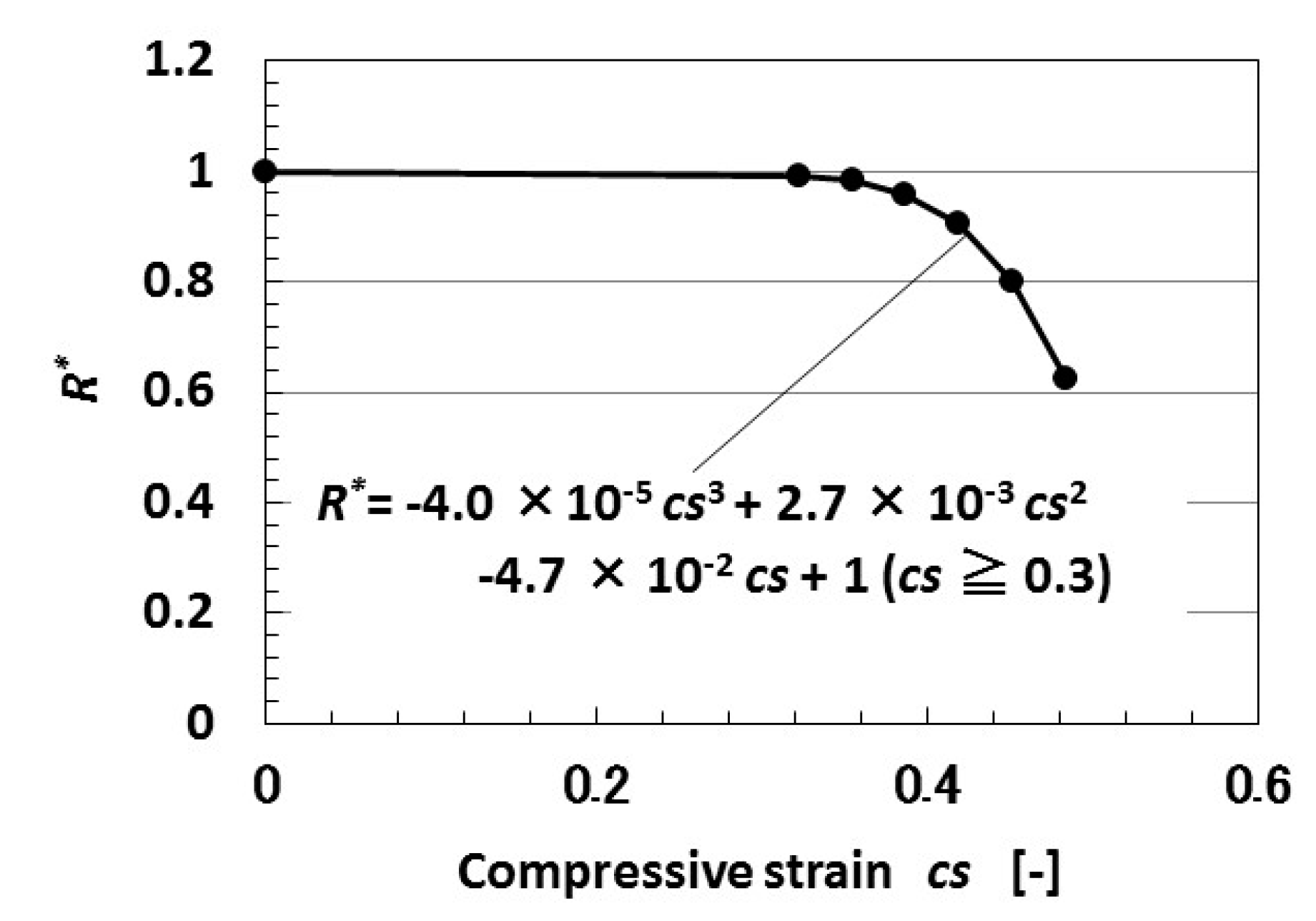
As a result, dimensionless resistance
R* (=
R/R∞,
R∞ the representative resistance) to compressive strain
cs is given by
Figure 3. At a high tensile strain, the resistances based on both the photovoltaic effect and built-in voltage decrease with increasing compressive strain. The tendencies in
Figure 2a,b can be explained by the theoretical results of
Figure 3. However, the properties of these resistances in
Figure 2c,d at low tensile strain cannot be explained by the present tunneling theory, and are due to the complicated fabrication of particles involved in the MCF rubber solar cell.
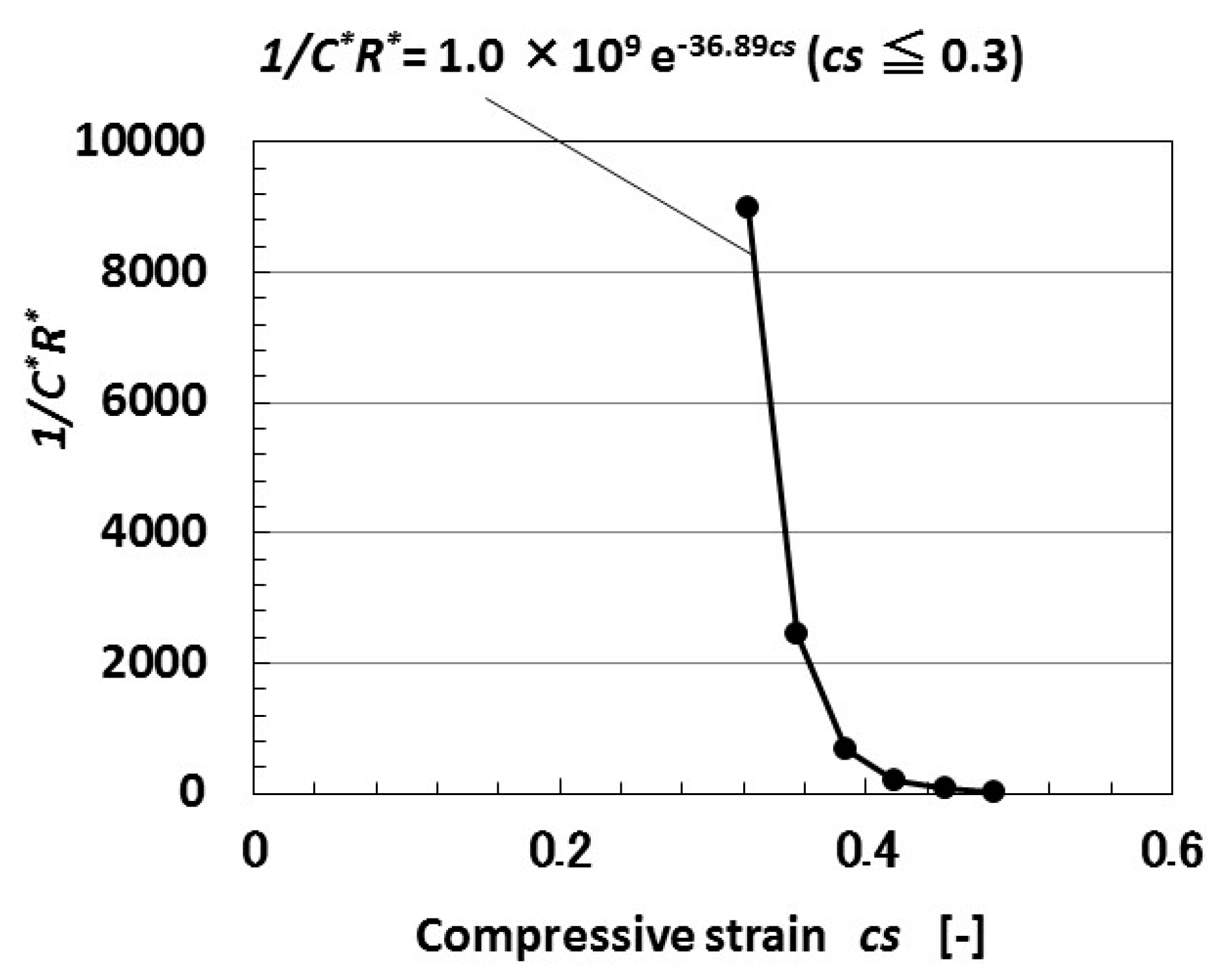
Second, we investigate the parameters of
C and
R. As metal particles facing each other can be assumed to have the same charge as the parts of an
n–
p-type semiconductor, the dimensionless capacitance
Cn* located at
n’s turn is presented as Equation (3), where
ε’ is the dielectric constant of the MCF rubber solar cell. The dimensionless capacitance
C* of the MCF rubber solar cell is calculated as that at the outlet of
n pairs of regions through which the electron transfers. As a result, 1/
C*R* is given by
Figure 4 as an exponential function of
cs.
On the other hand, electric current
I in the circuit of
Figure 1 is presented as Equation (4) with dimensionless factors of
C* and
R*, where
t* is the dimensionless time. The formula of Equation (4) presents that
I is an exponential function of 1/
C*R*.
By substituting the equation for 1/
C*R* shown in
Figure 4 to Equation (4), we find that
I contains an exponential function of
cs, and that
I decreases with increasing
cs. The theoretical results qualitatively coincide with the experimental results obtained in the second report [
19], in which the built-in current and photocurrent density decrease with increasing compressive strain. This tendency implies that the isolated layers of rubber or oleic acid among the particles and molecules in the
n–
p-type semiconductor dispersed in the MCF rubber solar cell are changed by compression. Therefore, we suggest that there exist thin layers among them. Based on this suggestion, we propose that
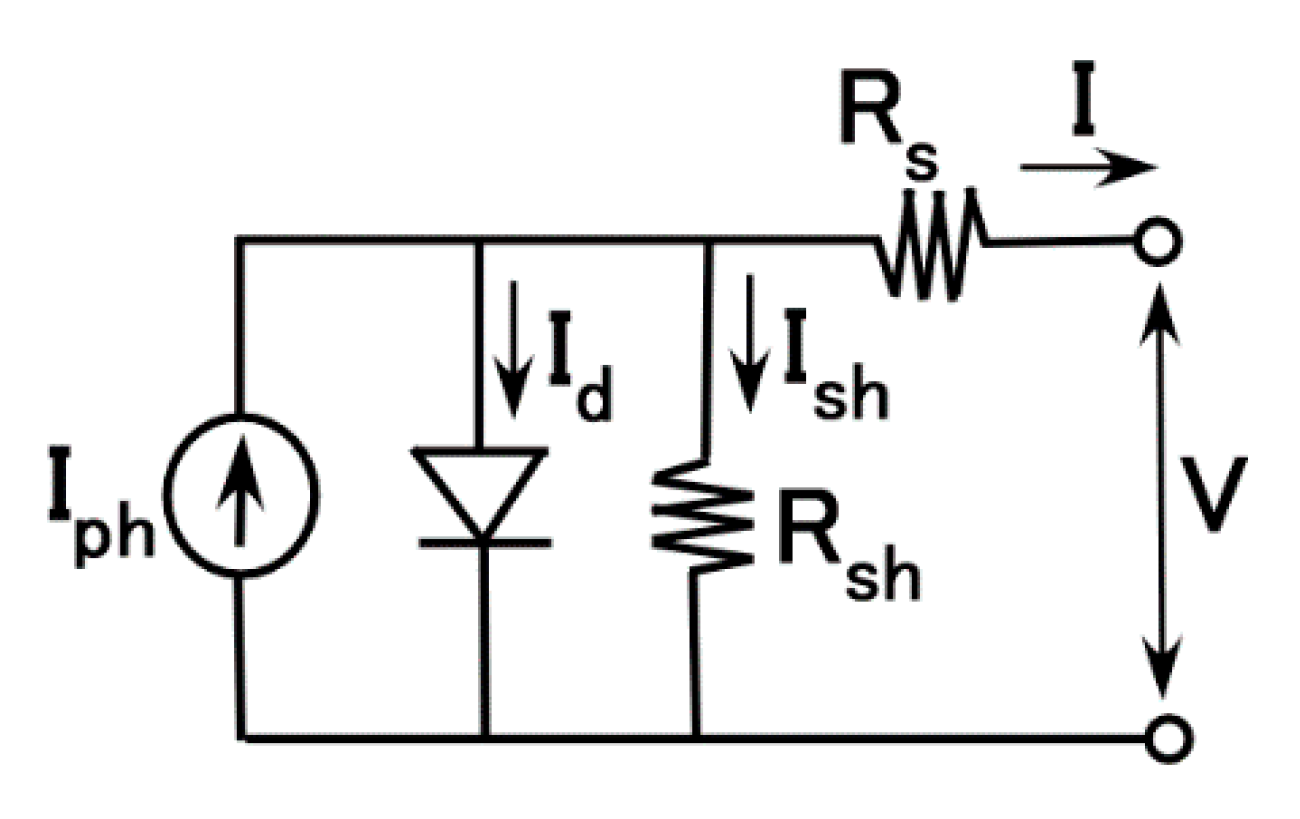
I is presented by Equation (5) in the case of another equivalent electric circuit; it is usually introduced in ordinary solar cells as shown by
Figure 5, where
IS is the reverse-bias saturation current,
Nd is the diode ideality factor (=
Vf/(
Vf −
Vi)),
Vf is the forward bias voltage,
Vi is the voltage drop at the thin isolated layer,
k is the Boltzmann constant,
Ta is the absolute temperature,
Iph is the photocurrent,
Id is the diode current,
Ish is the shunt current,
Rsh is the shunt resistance, and
Rs is the series resistance.
N denotes recombination in the
n–
p-type semiconductor; therefore, we can guess that in some of the
n-type and
p-type semiconductors of isoprene, oleic acid, and water molecules, the Ni particles recombine.
As a result, we can explain the photovoltaic property of the MCF rubber solar cell under elongation and compression by utilizing the equivalent electric circuit models shown in
Figure 1 and
Figure 5 as follows.
The isolated layers of rubber or oleic acid among the particles and molecules are not always thin; therefore,
I is generally presented by Equation (6) from the Shockley diode equation and Ohm’s law. As seen from the middle expression of Equation (6), the experimental data of the electric current
I includes the photocurrent
Iph and built-in current, which depends on
Id, and can be negative by the quantitative balance of
Iph,
Id, and
Ish under irradiation, as was presented in the previous two reports [
17,
19].
Id implies the dark current and is relevant to
Rsh. The dark current is generated by the influx of holes and electrons, which results from the existence of the depletion layer between the
n-type and
p-type semiconductors.
Id is a function of the diffusion potential
VD, which is presented by the difference in electron affinity between the
n-type and
p-type semiconductors. The difference in electron affinity denotes the Schottky barrier between heterogeneous materials. Therefore, by considering, in addition to the experimental results, that
I decreases with increasing
cs, the potential and electron affinity among isoprene, oleic acid, water molecules, and Ni particles are different enough to become a part of the semiconductor. In addition, the difference in potential and electron affinity, or
VD, changes by compression or elongation. Therefore, the photo and built-in currents change by compression or elongation, as shown in the previous reports [
17,
19].
On the other hand, NR-latex particles and oleic acid coated around Fe
3O
4 in MCF rubber can also be considered to have a spontaneous polarization of the dielectric. In that case, as the well-known formula at the field of ferroelectric material, the photocurrent
Iph is presented to be approximated to
J by Equation (7) as a function of glass factor
k1, which is dependent on the amplitude of spontaneous polarization, where
α is the optical absorption coefficient,
f is the frequency of light, and
Ir is the light intensity [
21]. This formula has been used at the case of explanation of anomalous photovoltaic effect, which is also called the bulk photovoltaic effect. As
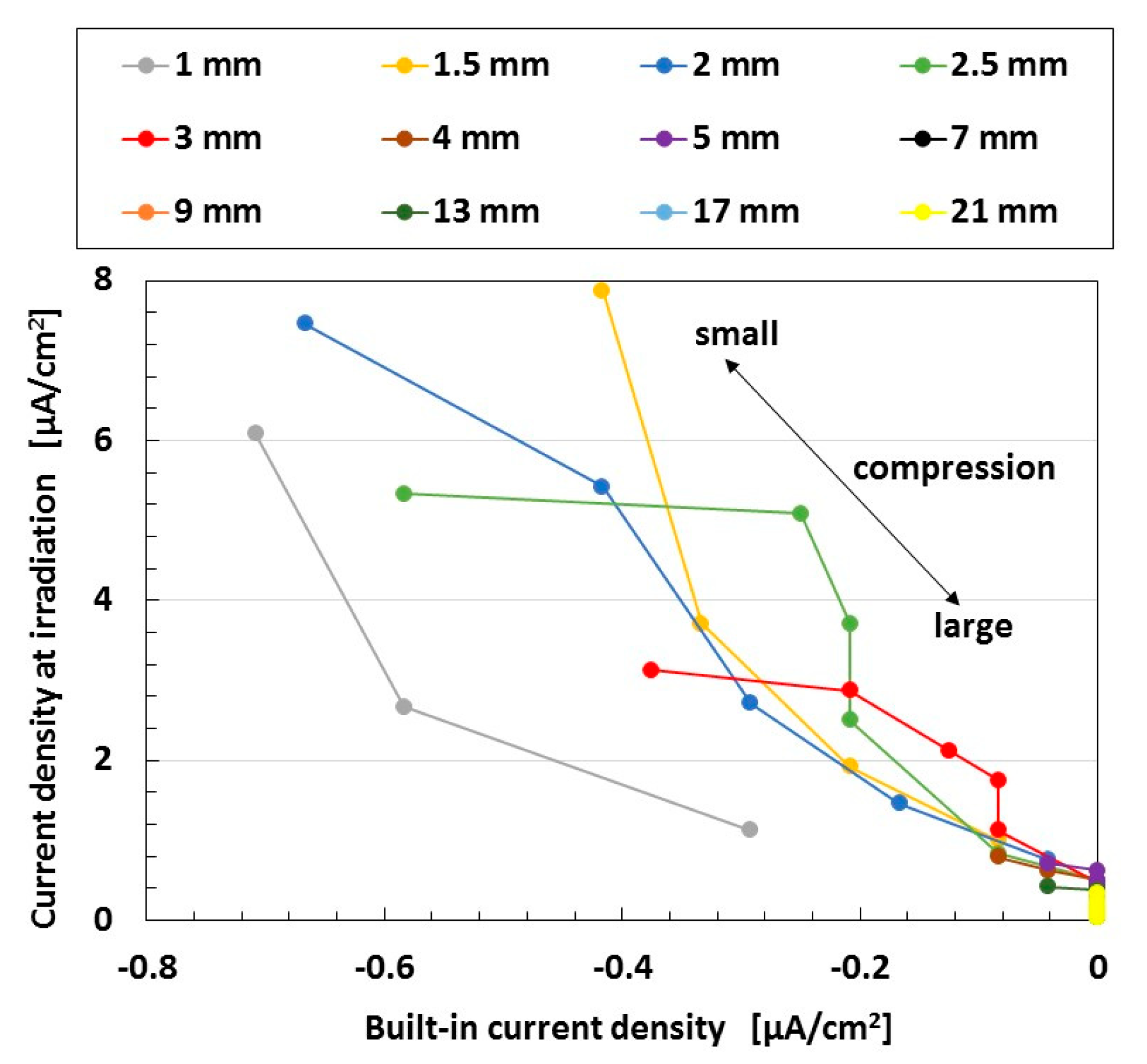
k1 is considered to be involved in the built-in current, the relation between the photo and built-in currents is linear, which coincides with the relation between the current at irradiation and the built-in current from the experimental data of the second report [
19], as shown in
Figure 6. In the figure, each line at each amplitude of tension is the change due to compression. As the compression increases, these currents decrease because of increased contact between the NR-latex particles and oleic acid as the distance between them decreases.
On the other hand, in the case of the equivalent electric circuit from
Figure 1,
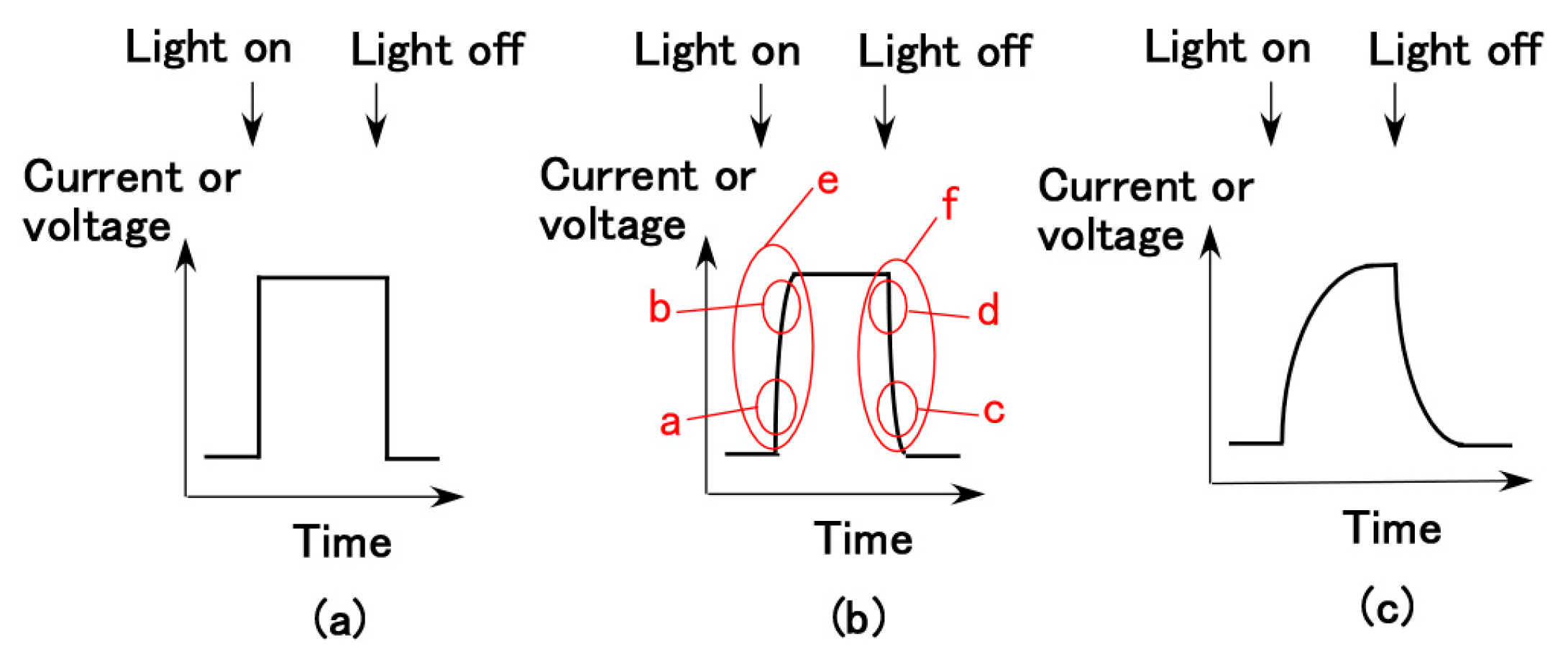
C R presents the time constant, which results in the degree of the rising and falling edges of the current or voltage curves as shown by
Figure 7, and which indicates the response time for irradiation. The response time is minimal enough to behave as in
Figure 7a. However, wet-type solar cells, such as dye-sensitized solar cells, have a delay to irradiation because of the oxidation–reduction reaction. The response time
t is generally divided into three types, as shown in Equation (8):
t1 based on
C and
R corresponding to
Figure 7b;
t2 based on the speed of carrier diffusion at deeper regions than the depletion layer corresponding to
Figure 7c; and
t3 based on the speed of carriers in the inner depletion layer corresponding to
Figure 7b.
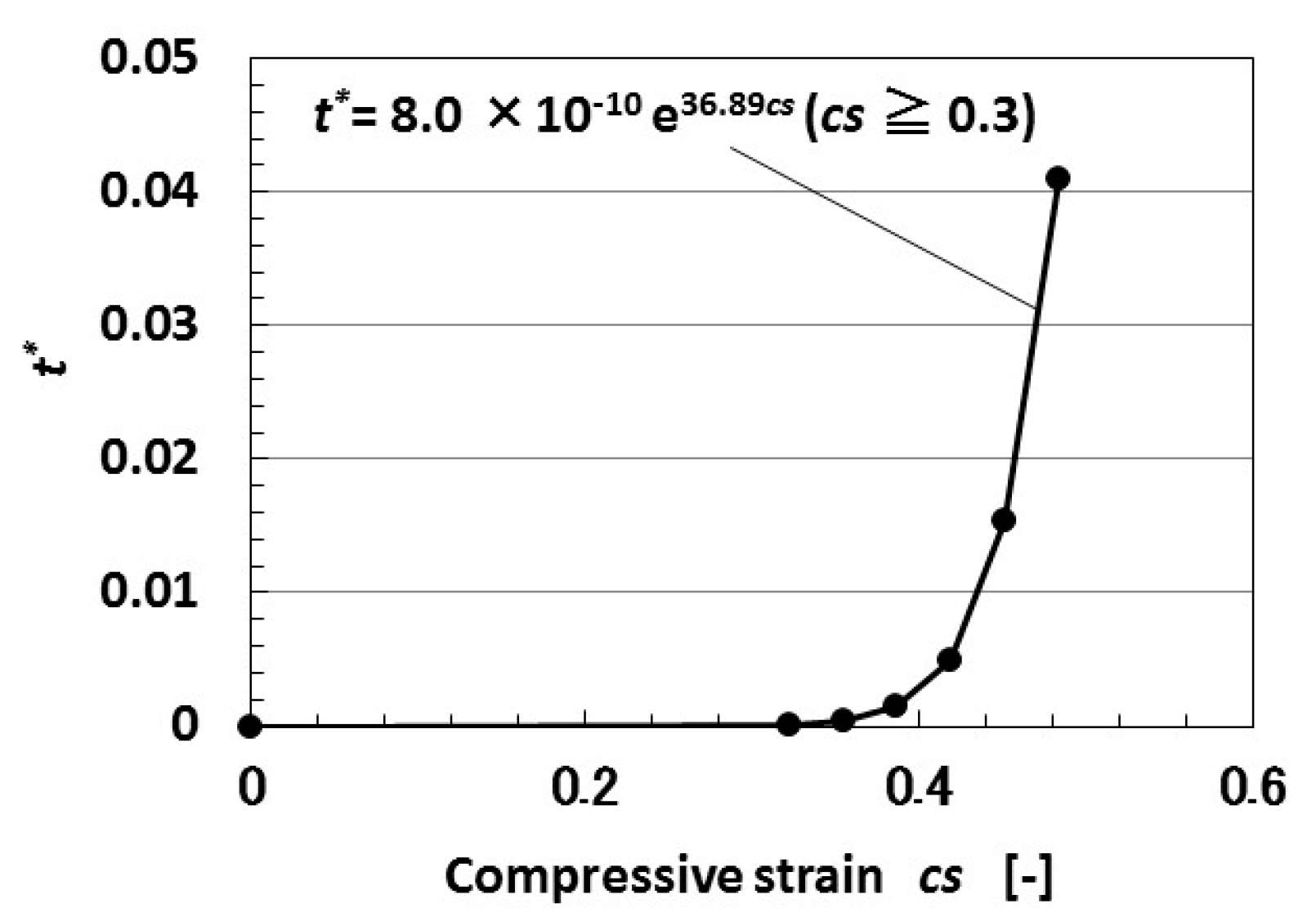
Regarding
t, the theoretical result of the dimensionless time constant
t* (=
C*R*) by the tunneling effect obtained from Equations (1) and (3) is shown by
Figure 8.
t* increases with increasing
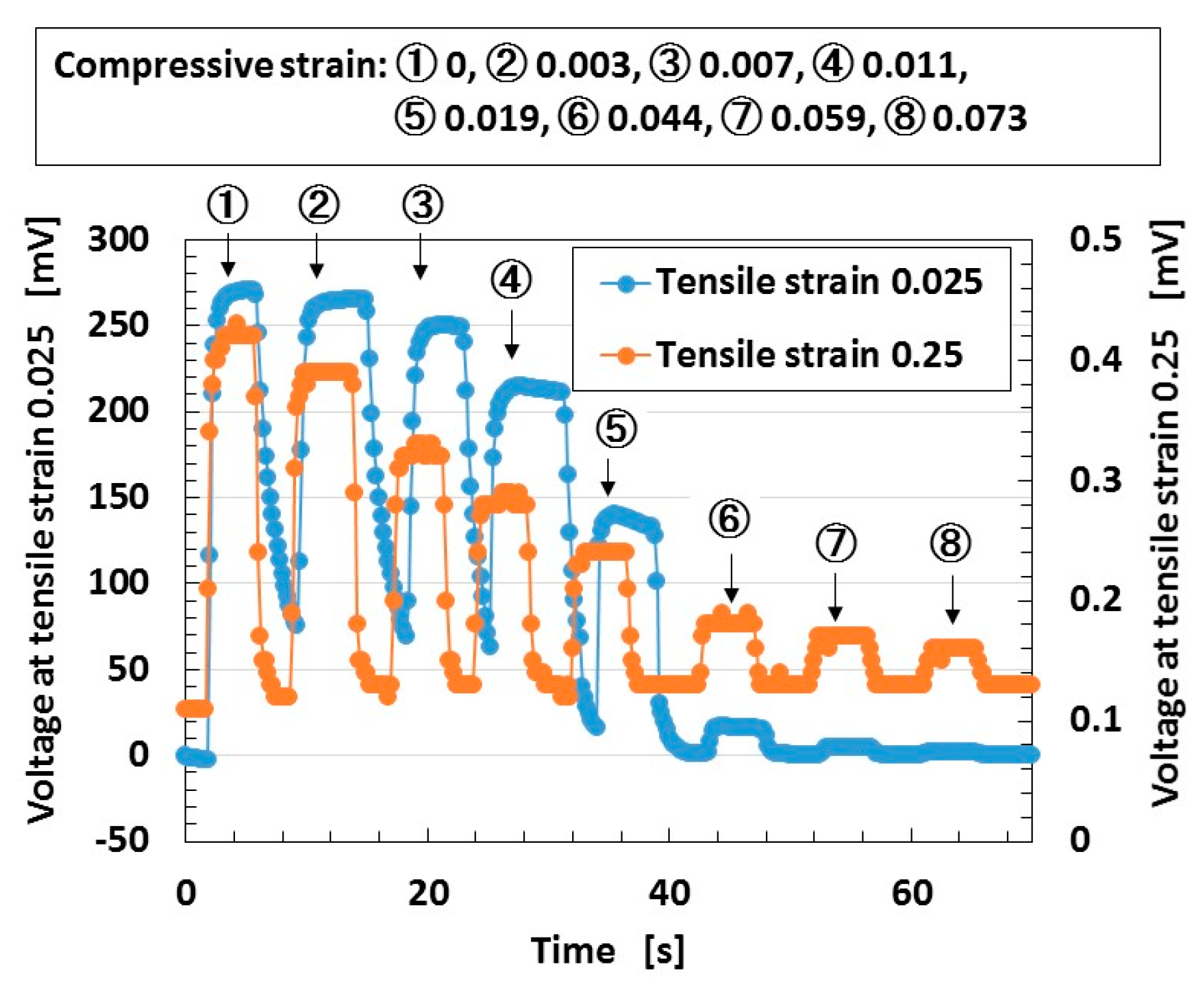
cs. In contrast, the experimental result of the voltage in wet-type MCF rubber solar cells under both elongation and compression is shown by
Figure 9.
Under tensile strains of 0.025 and 0.25, the MCF rubber solar cell was gradually compressed with increasing compression strain from ① to ⑧. The tendency as shown by
Figure 7c can be seen under smaller compressive strain, and the tendency changes to
Figure 7a through
Figure 7b with increasing compressive strain. This denotes that by the compression of the characteristics of reacting carriers of
n-type and
p-type semiconductors of isoprene, oleic acid, and water molecules, Ni particles change from state
t2 to states
t1 and
t3, and states
t1 and
t3 depreciate. The theoretical result of
Figure 8 correspond to the change in
t1 by compression. On the other hand, when the tensile strain increases, the tendency changes from
Figure 7c to
Figure 7b. This indicates that by elongation, the characteristics of the reacting carriers change from state
t2 to state
t1 or
t3.
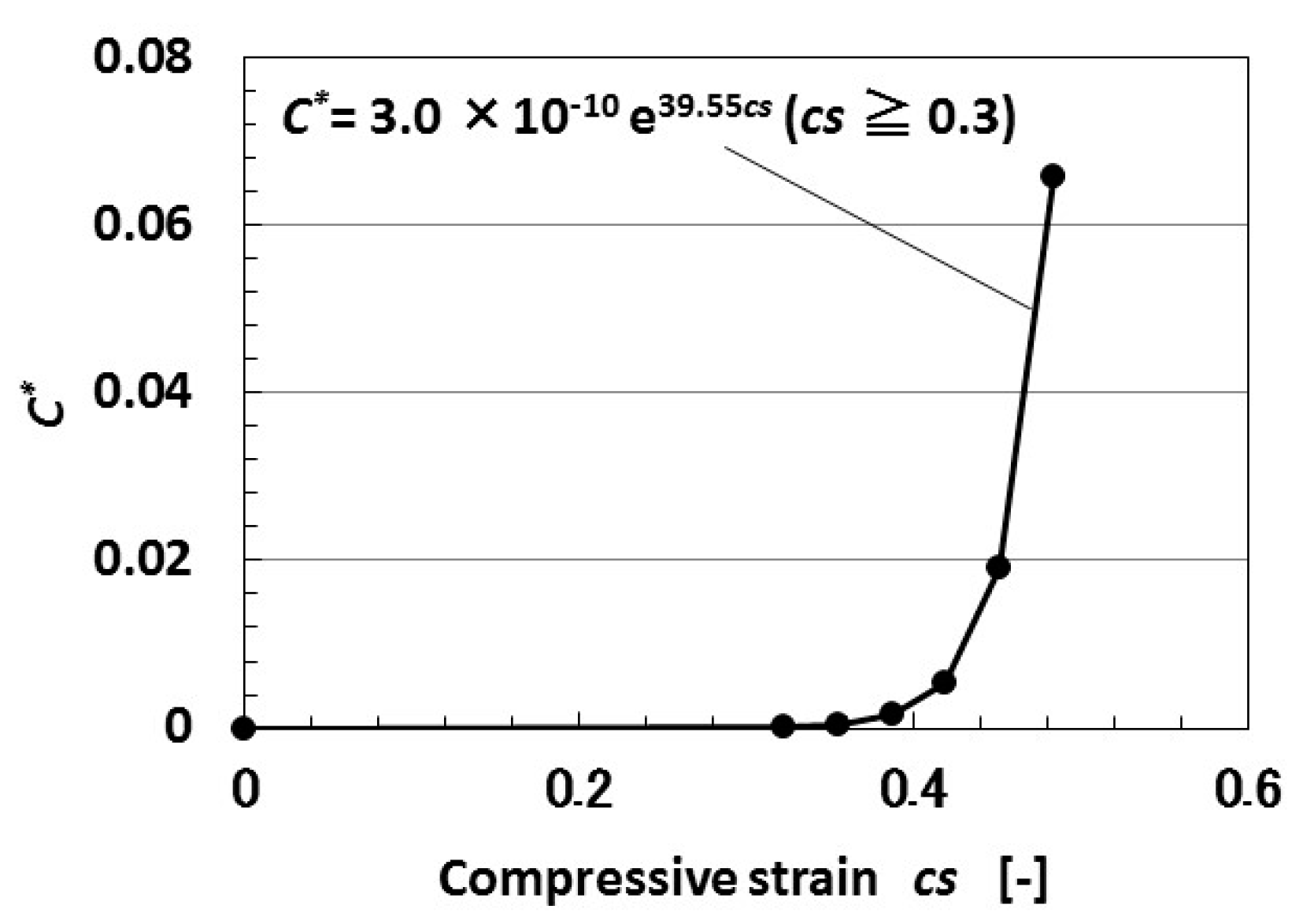
Finally, we investigate the charge of the MCF rubber solar cell by irradiation. The theoretical result of
C* by the tunneling effect obtained from Equations (1) and (3) is shown in
Figure 10. From the results of
Figure 2,
Figure 7 and
Figure 8 under irradiation, we can also obtain the same result that
C increases with increasing compression, as shown in
Figure 10.
On the other hand, as shown in
Figure 7b,
t changes as the light is switched on and off, because it can be considered geometrically that the curve shown in
Figure 7b,c cannot be delineated if
t is a constant value.
t at b in
Figure 7b is larger than
t at a,
t at d is larger than
t at c, and
t at e is larger than
t at f. State e in
Figure 7b corresponds to optical charging, and the state of f corresponds to optical discharging.
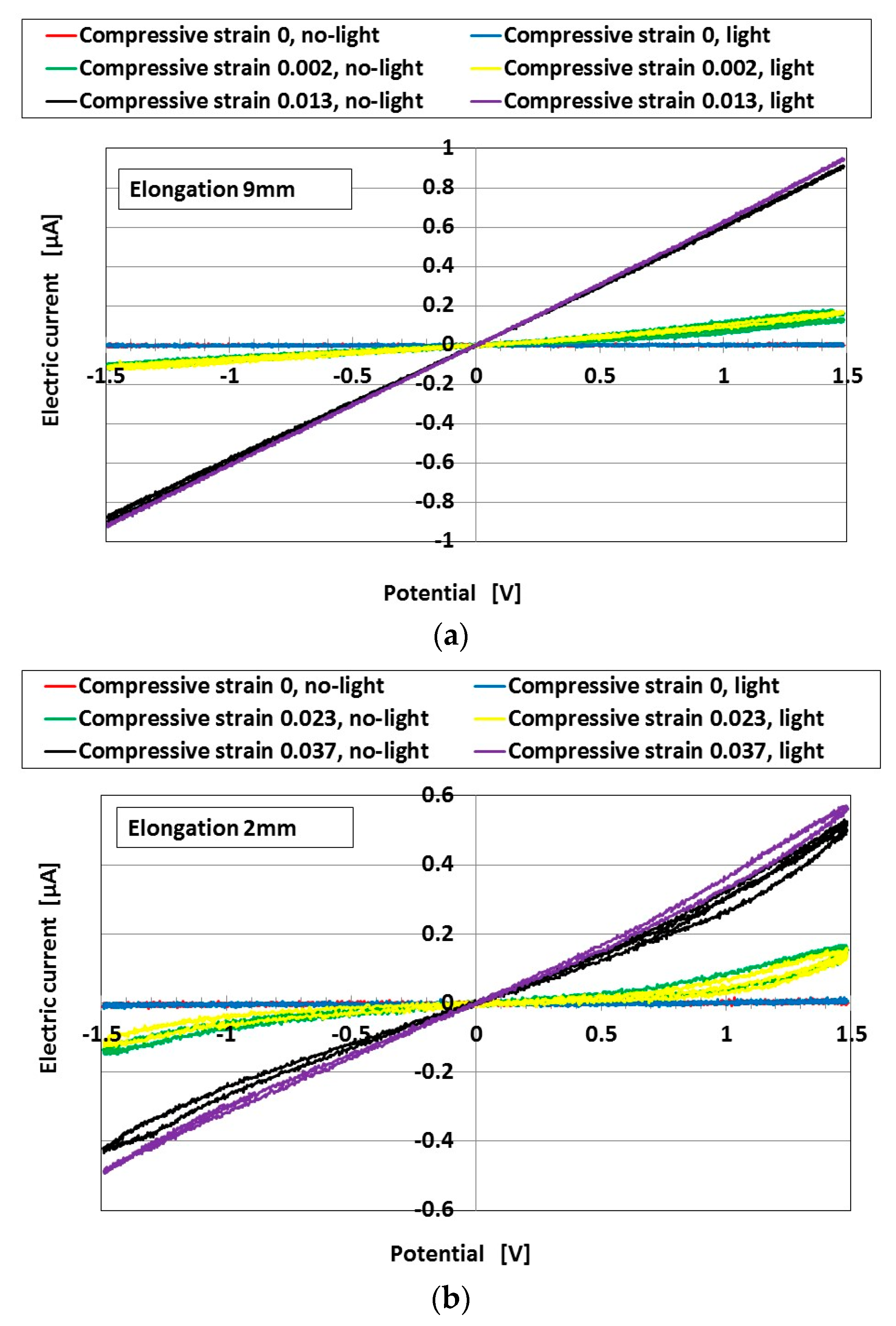
The capacitance described above is in relation to charging and discharging by illumination. It is effective to measure the cyclic voltammogram of the MCF rubber solar cell in order to investigate the relation of capacitance to compression and elongation. The series of cyclic voltammogram plots in
Figure 11 shows the relation between the electric current
I and voltage
V measured by potentiostat (HA-151B, Hokuto Denko Co. Ltd., Tokyo, Japan) and the
I–
V characteristics, at 50-mHz scan rates in the potential domain of −1.5–1.5 V, as shown by
Figure A5 in
Appendix B. The same experimental apparatus was used as the one for measuring photoelectricity under compression and elongation in the previous second report [
19]. “No-light” in the figure denotes the case without irradiation, and “light” denotes the case with irradiation. The tensile strength to elongate the MCF rubber and compression with strain were simultaneously applied to the MCF rubber. At small elongation or compression, the
I–
V curve was nonlinear, and the area surrounded by the electric current and voltage was small. The
I–
V characteristics were different from those of an ordinary solid-state, dye-sensitized solar cell or polymer solar cell [
12,
13,
22]. The MCF rubber solar cell is close to the
I–
V curve of a photodiode, as
I becomes larger at the largest
V. This is a typical property of MCF rubber solar cells, and it is suggested that it is possible to use the MCF rubber solar cell as a photodiode [
23,
24]. In particular, the curve becomes linear with increasing elongation or compression due to the heterojunction structure becoming deformed such that the distance between
A− and
D+ decreases. The linear tendency means that the MCF rubber solar cell becomes conductive.
On the other hand, from
Figure 11, the area of hysteresis of the
I–
V curve becomes larger with increasing compressive strain, and then decreases with increasing compressive strain. The area decreases with increasing elongation. This tendency indicates that
C becomes larger as the compression increases at small compressions, and then decreases with increasing elongation. The former tendency is coincident with the previously described results from
Figure 2,
Figure 7,
Figure 8 and
Figure 10. As shown in detail by
Figure 11, the area of hysteresis is not different between charging and discharging. This tendency coincides with the result that
C R is different between the states of charging and discharging, which can be derived from the previously described result in
Figure 7b, wherein
t at e is greater than
t at f.
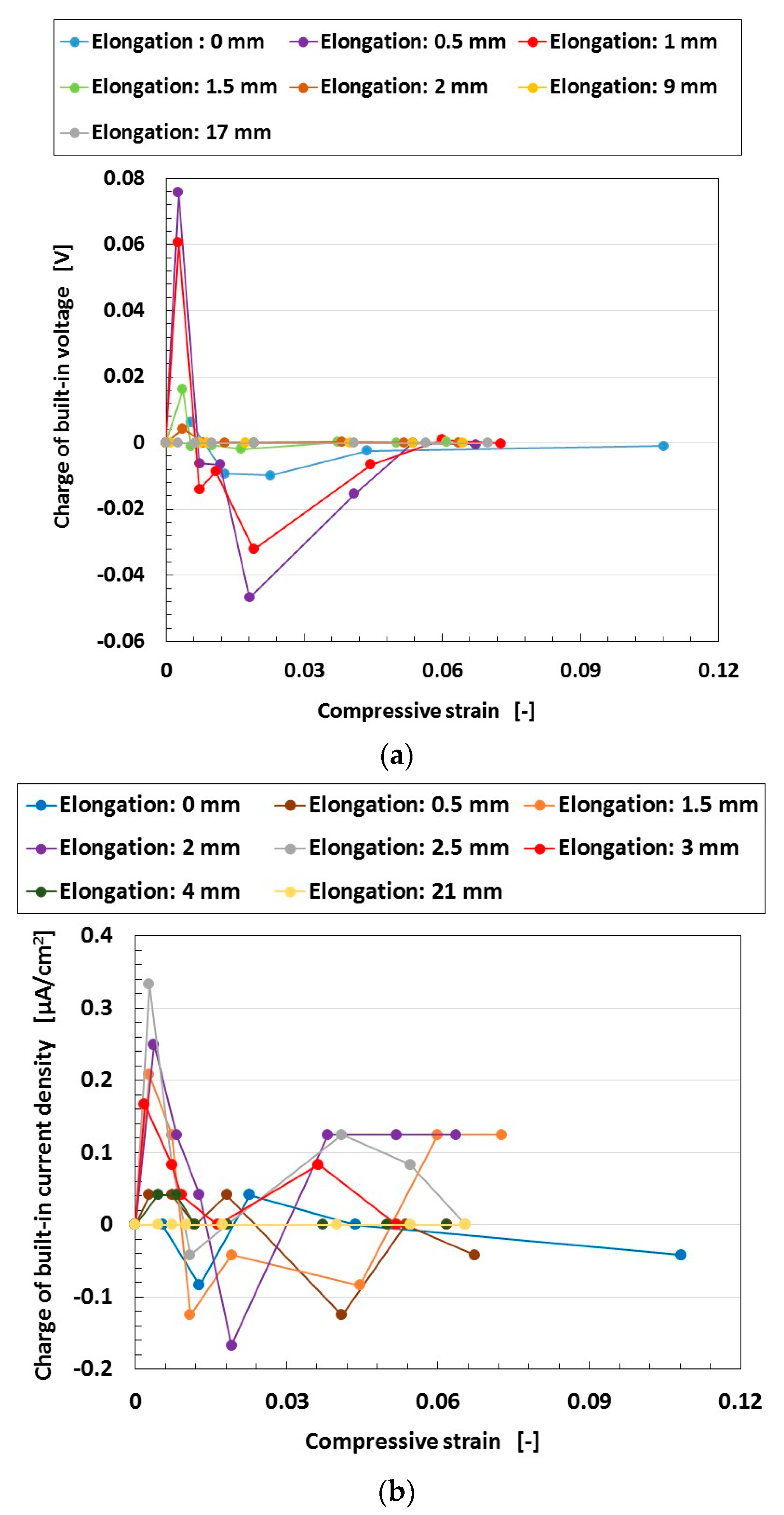
In conclusion, from the above-mentioned results, the wet-type MCF rubber solar cell under tension and compression can charge electricity. The voltage and current can be verified by other experimental results of charging, as shown by
Figure 12. The electricity charged in the MCF rubber solar cell can be evaluated with the enhancement of built-in electricity (built-in voltage and built-in current) by irradiation. From the figure, the charge in the built-in electricity increases with increasing compression at a small compressive strain, and then decreases as the compressive strain increases further. This tendency coincides with the result of
Figure 11. On the other hand, the charge in the built-in electricity increases at small elongations, and then decreases at larger elongations. The former tendency is found in the linear elastic region of the MCF rubber, and the latter at the plastic region. The former is a typical characteristic of the MCF rubber solar cell, and the MCF rubber solar cell might be used as an inner linear elastic region for engineering applications of H-Skin for robotics. The latter tendency coincides with the results of
Figure 11.
3. MCF Rubber Battery
We investigated the electric charging by irradiation on an MCF solar cell rubber. As seen from
Figure 11, the
I–
V characteristics at no-light can be suggested to have the same properties as those at irradiation, which is pointed out in
Section 2. Therefore, there exists the possibility of an electric storage system in the MCF rubber under no-light. This is effective enough to be utilized for many engineering applications of H-Skin, because the MCF rubber can have an electric charge regardless of irradiation. In contrast to the expectation that the MCF rubber solar cell becomes mere MCF rubber in the experimental circumstance without irradiation, MCF rubber can have an electric charge in the case involving other agents except for sensitized dye, provided that it has an oxidation–reduction reaction such as that in the MCF rubber solar cell. Therefore, we used various kinds of agents and their compounds, as shown in
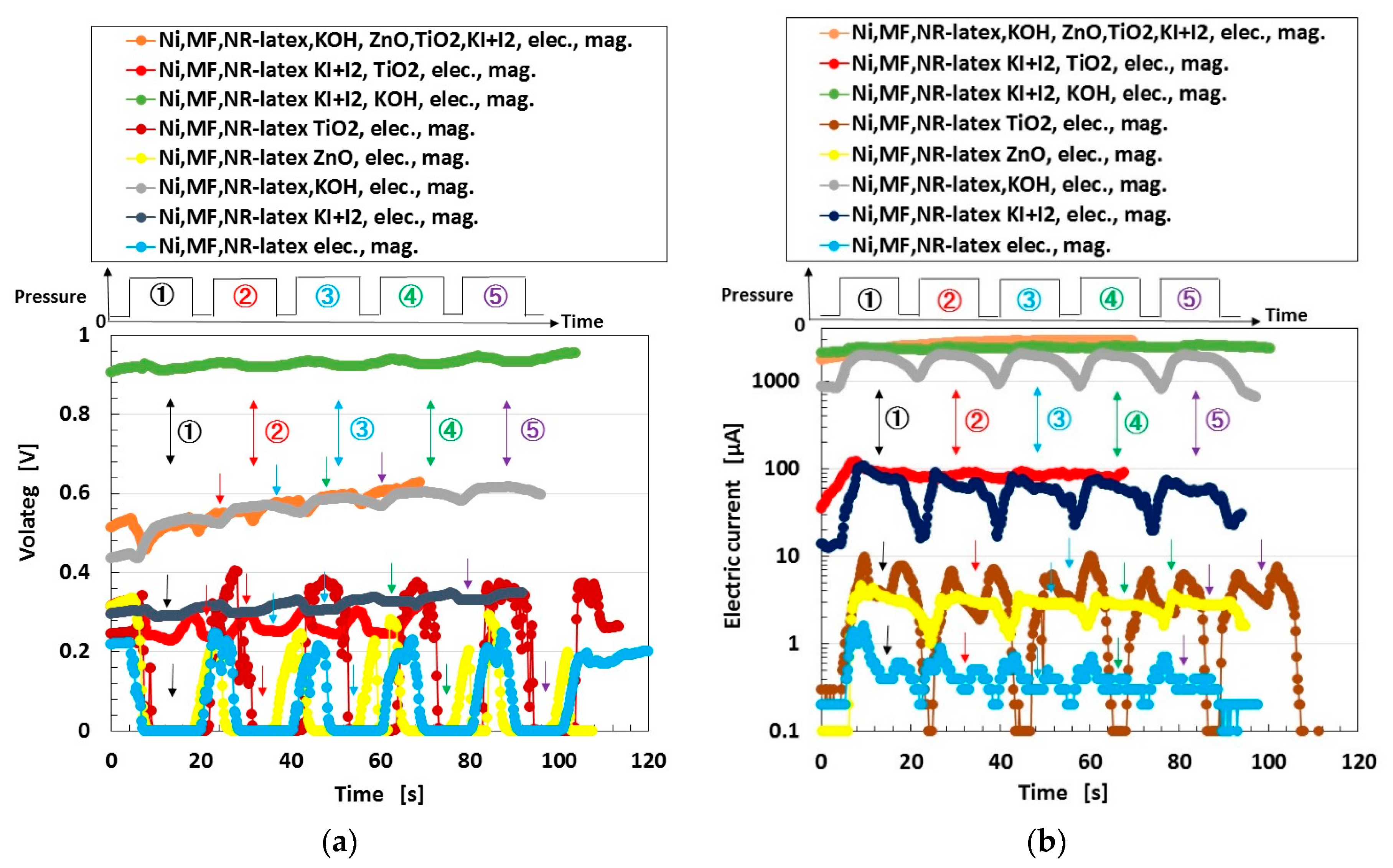
Figure 13. The electric storage system of MCF rubber corresponds to built-in electricity. The present MCF rubber corresponds to dry-type MCF rubber.
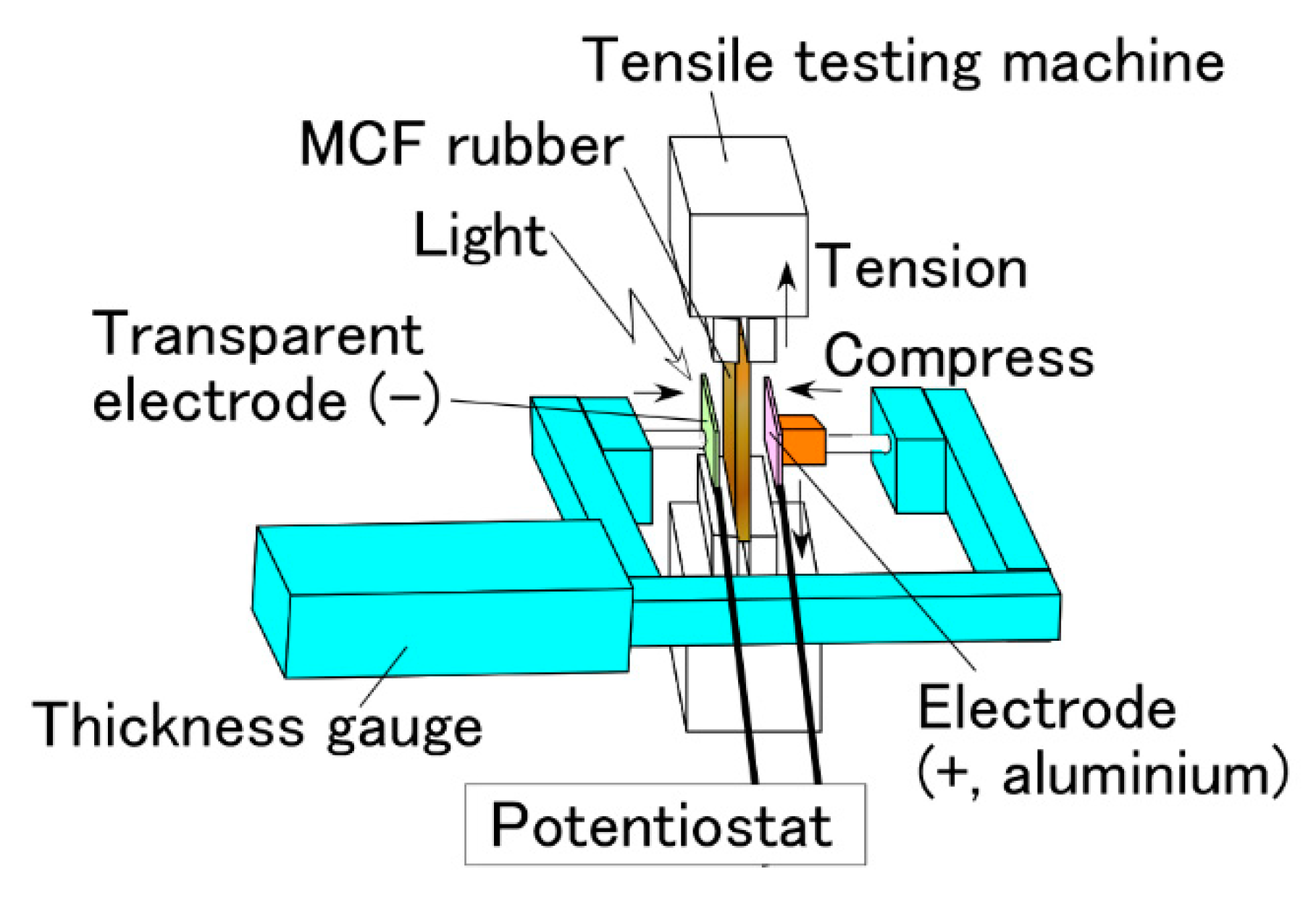
The electrolytically polymerized MCF rubber was around 15 mm × 19 mm × 1 mm in size (“elec.” in the figure denotes electrolytic polymerization); a constant electric field was applied at 6 V, and an electric current of 2.7 A was passed between stainless-steel plates with a 1-mm gap for 10 min under atmospheric conditions, and a 188-mT magnetic field was applied across the liquid (“mag.” in the figure denotes application of the magnetic field). The rod with a diameter of φ8 mm attached on a small automatic measuring tensile testing machine (SL-6002, IMADA-SS, Co. Ltd., Toyohashi, Japan) that was used previously [
19] was touched to one side of the aluminum electrodes between which the MCF rubber was sandwiched. The voltage and electric current between the electrodes were measured by a digital multi-meter (PC710, Sanwa Co. Ltd., Okayama, Japan). The figure shows the changes in voltage and electric current due to the application of step-like pressure with five repetitions from ① to ⑤. The arrows in the figure show the timing of the applied pressure. Each component of the used MCF rubber comprised 1.5 g of Ni, 0.75 g of MF, 4.5 g of NR-latex, 0.25 g of TiO
2, 0.25 g of ZnO, 0.75 g of potassium hydroxide, KOH with 1 g water, and 0.5 g of KI+I
2.
First, as seen from cases of “Ni, MF, NR-latex” and “Ni, MF, NR-latex, ZnO”, “Ni, MF, NR-latex, TiO
2”, and “Ni, MF, NR-latex, KI+I
2” (these cases are called “FC” for convenience), the voltage increased temporarily, and then decreased with increasing pressure, that is, it increased at lower pressure and decreased at higher pressure. The cause is due to the piezoelectric phenomenon that was clarified in the case of the “Ni, MF, NR-latex, ZnO” MCF rubber in the previous study [
25]. At low pressure, the positive and negative ions approach each other such that the voltage increases. At higher pressure, the positive and negative ions come into contact, and the Ni particles aggregate such that the electron can pass through the MCF rubber; therefore, voltage decreases. On the other hand, in the other cases of MCF rubber in
Figure 13 (these cases are called “LC” for convenience), even if the pressure was larger, the voltage changed according to the step-like shape of pressure. The cause was that the oxidation–reduction reaction in LC was larger than that in FC.
Next, regarding the electric current, in the case of FC, temporary decreasing can be seen. The cause is that the positive and negative ions come into contact and that electricity discharges. On the other hand, in the other case of LC, it changes according to the step-like shape of pressure.
Depending on the selection of the kinds of agents, we made an MCF rubber that had a larger amount of electricity that was comparable to an ordinary polymer battery: 1-V-order of voltage and 1-mA-order of electric current. The present MCF rubber is very flexible and elastic to compression and tension because of the NR-latex. The MCF rubber has such a small size and thickness, around 15 mm × 19 mm × 1 mm, that we can realize a lightweight battery. As a result, if we use many MCF rubbers, we can obtain a flexible and elastic battery with greater electric charging. Therefore, we can also realize H-Skin with electric charging that does not require irradiation.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}

















