Preload Monitoring of Bolted L-Shaped Lap Joints Using Virtual Time Reversal Method


Abstract
:1. Introduction
2. A Virtual Time Reversal Method
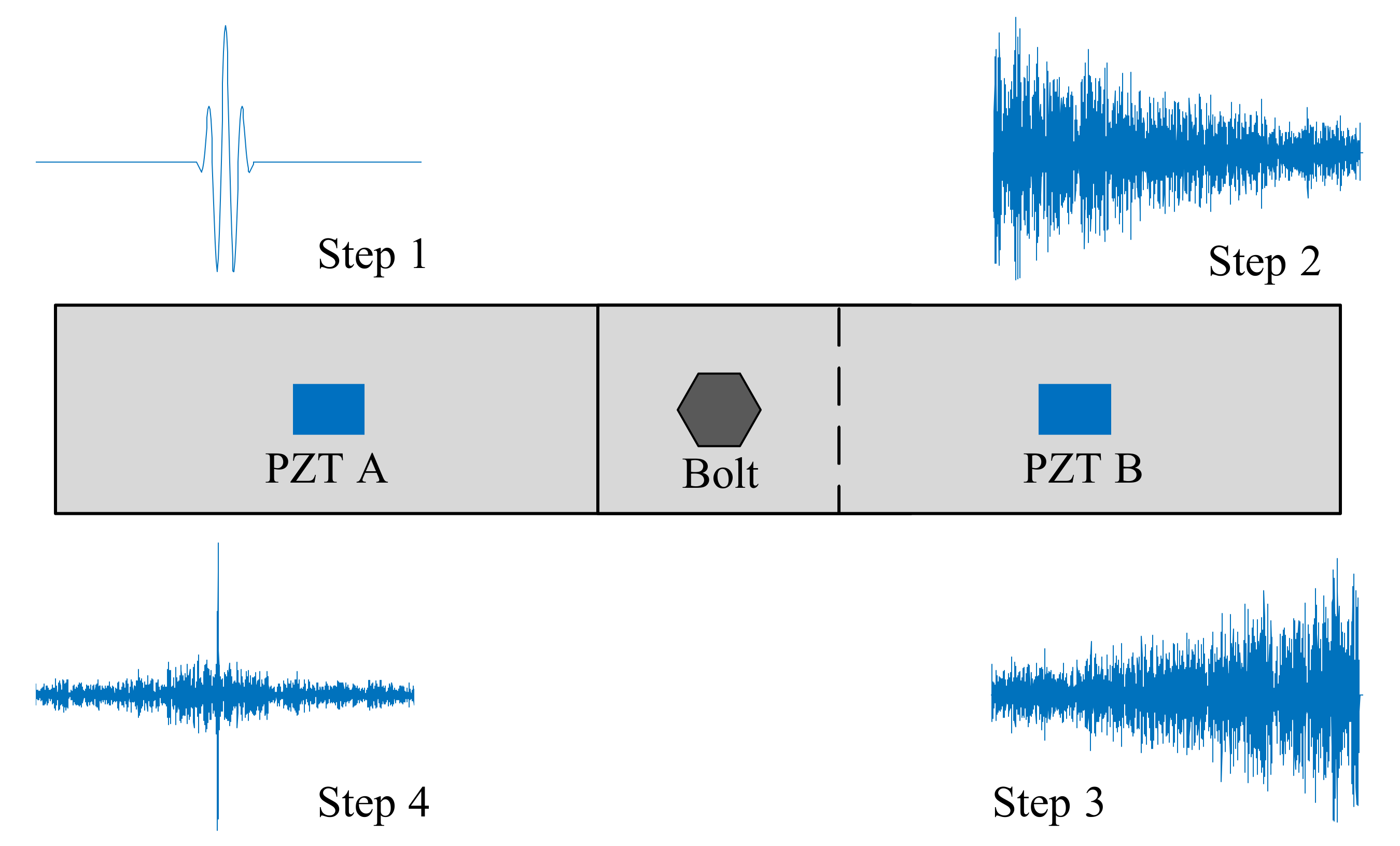
2.1. The Time Reversal Guided Wave Method
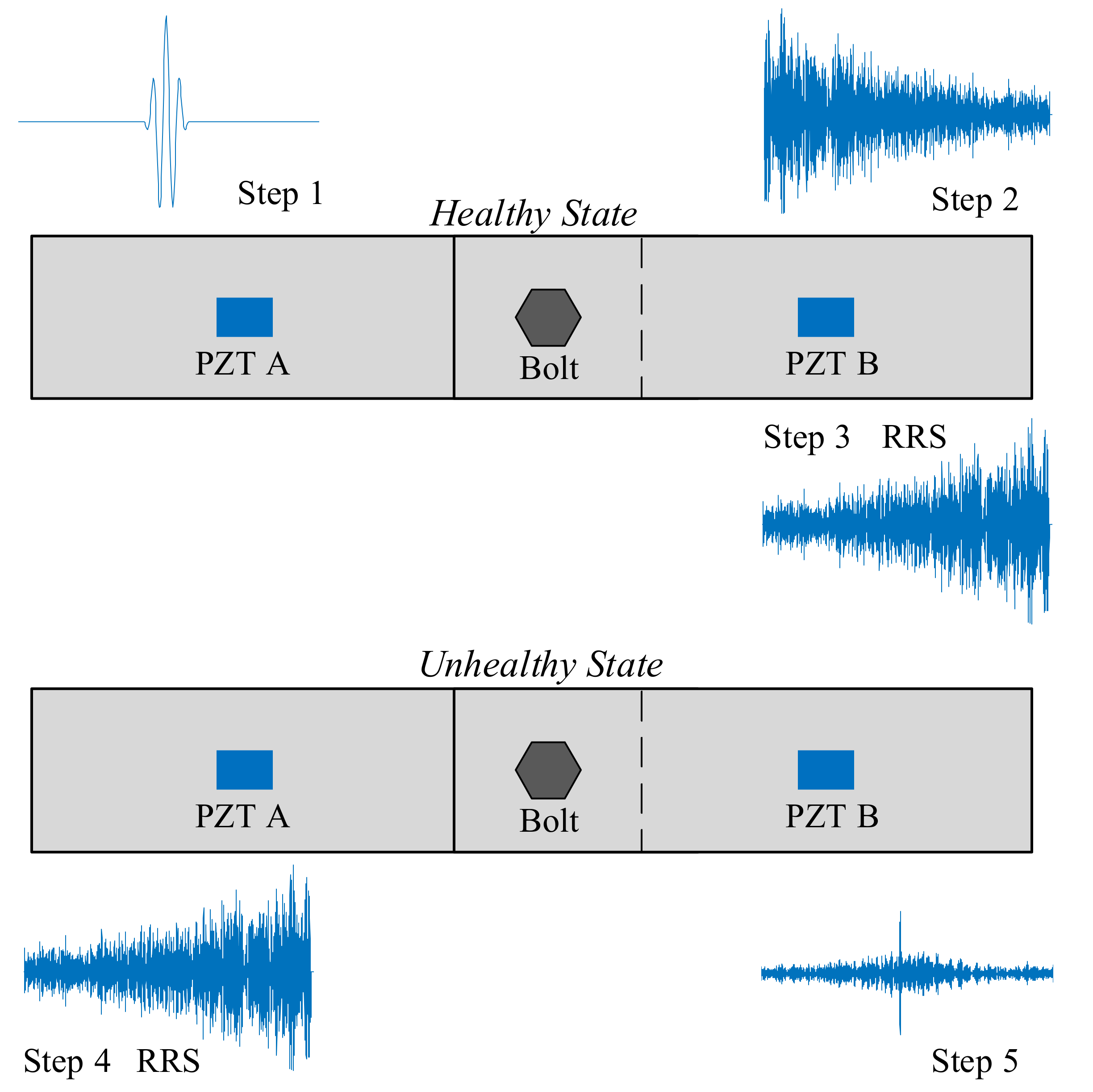
2.2. A Virtual Time Reversal Method for Bolt Preload Monitoring
3. Experimental Setup and Procedure
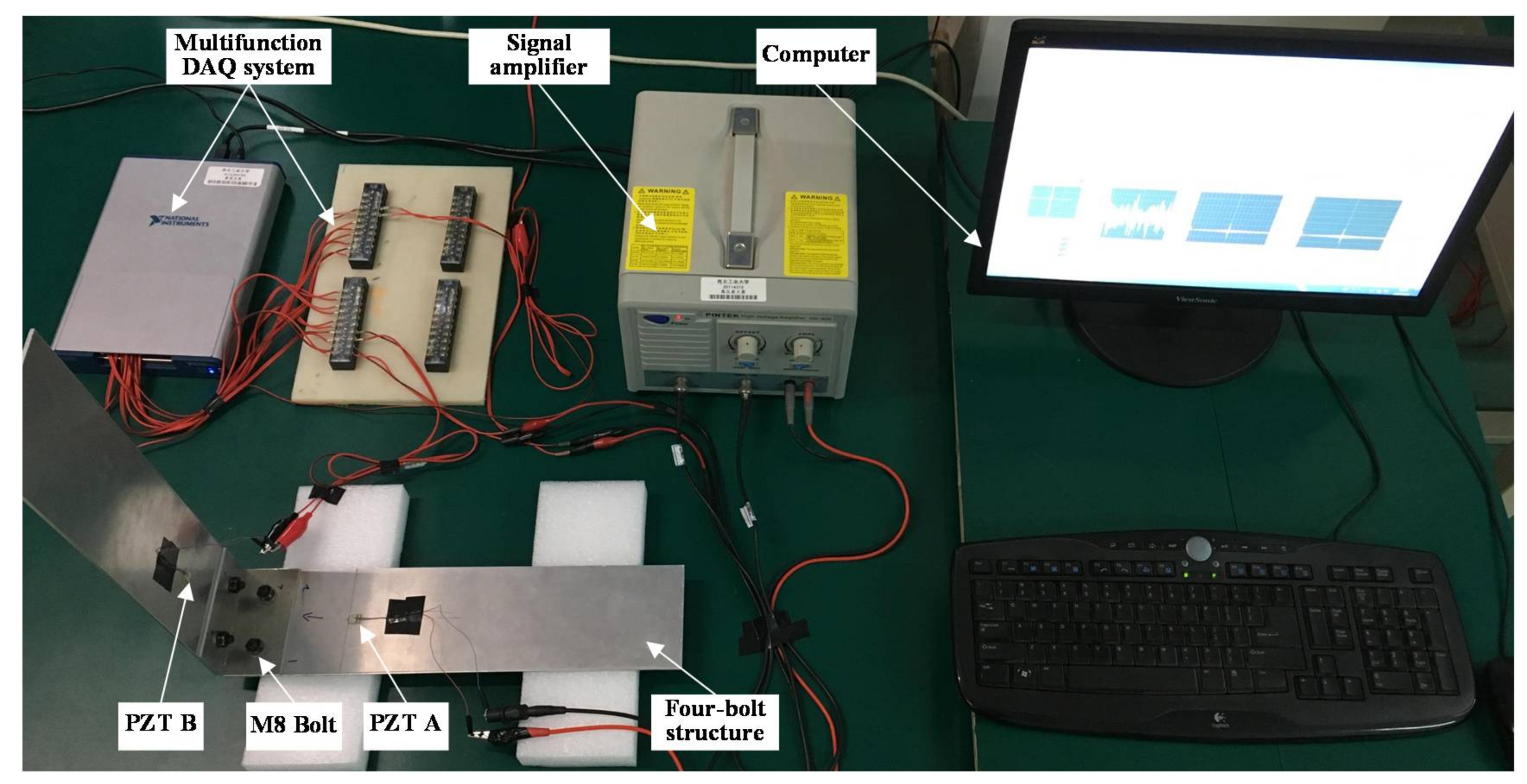
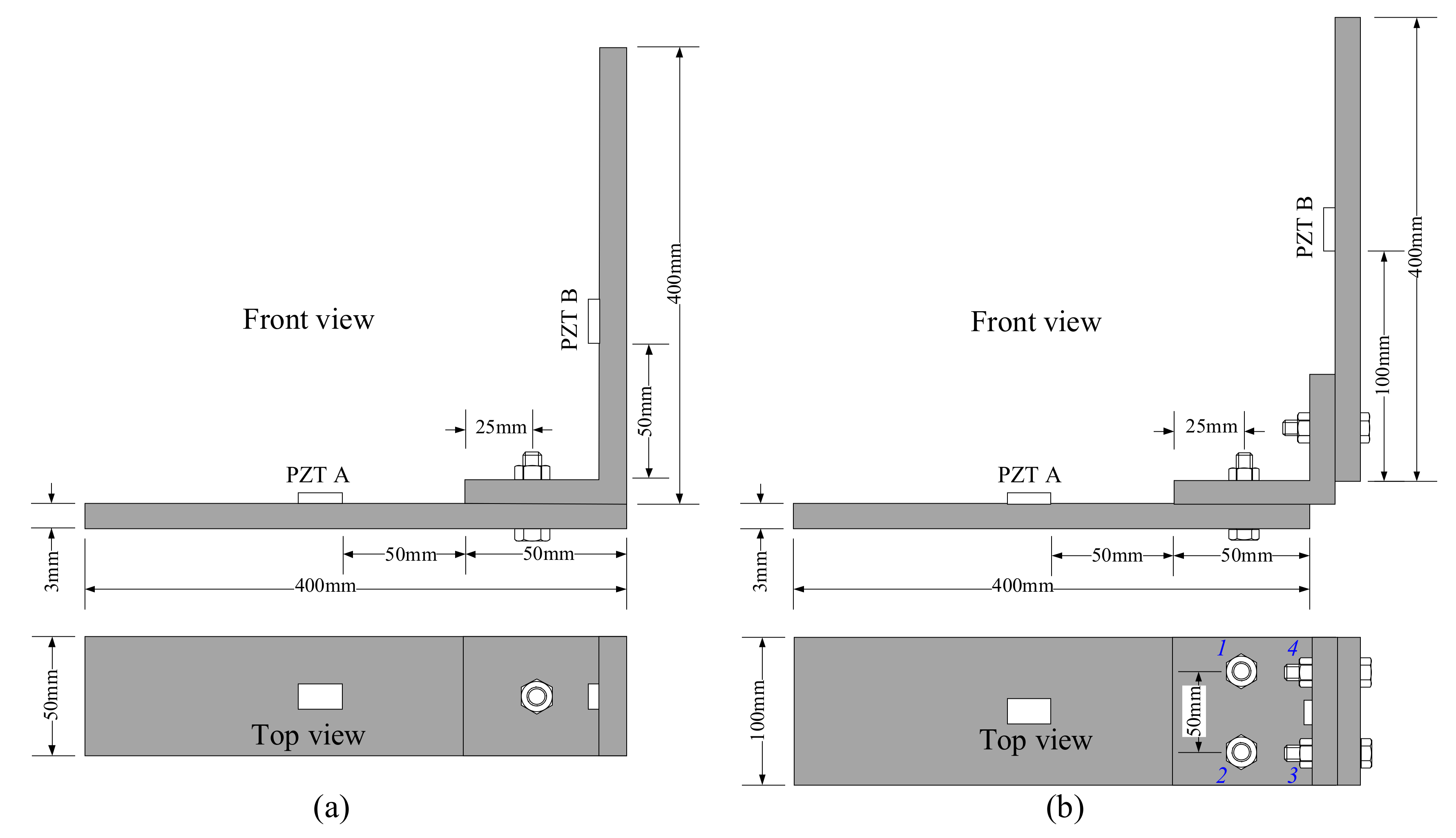
3.1. Experimental Setup and Specimens
3.2. Experimental Procedure
4. Results
4.1. Results of the Single Bolt Structure
4.1.1. The Time Reversal Method
4.1.2. The Virtual Time Reversal Method
4.2. Results of the Four-Bolt Structure
4.2.1. The Time Reversal Method
4.2.2. The Virtual Time Reversal Method
5. Discussion
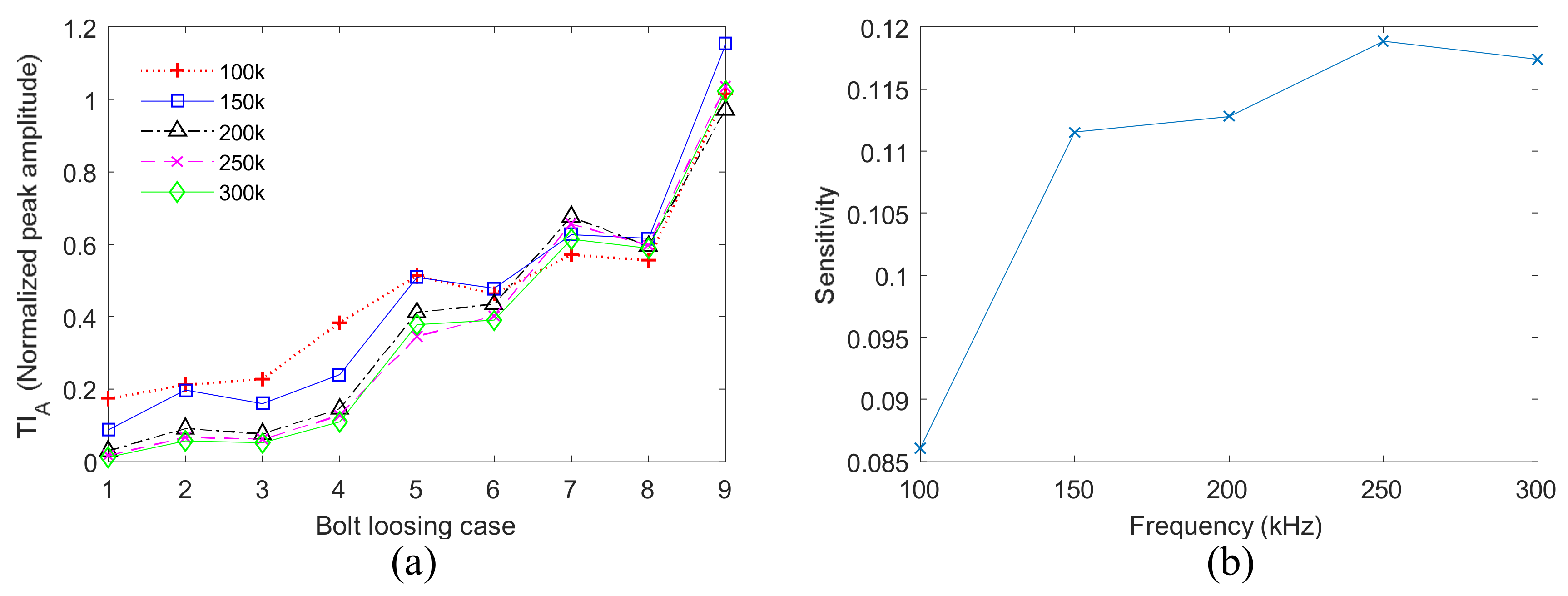
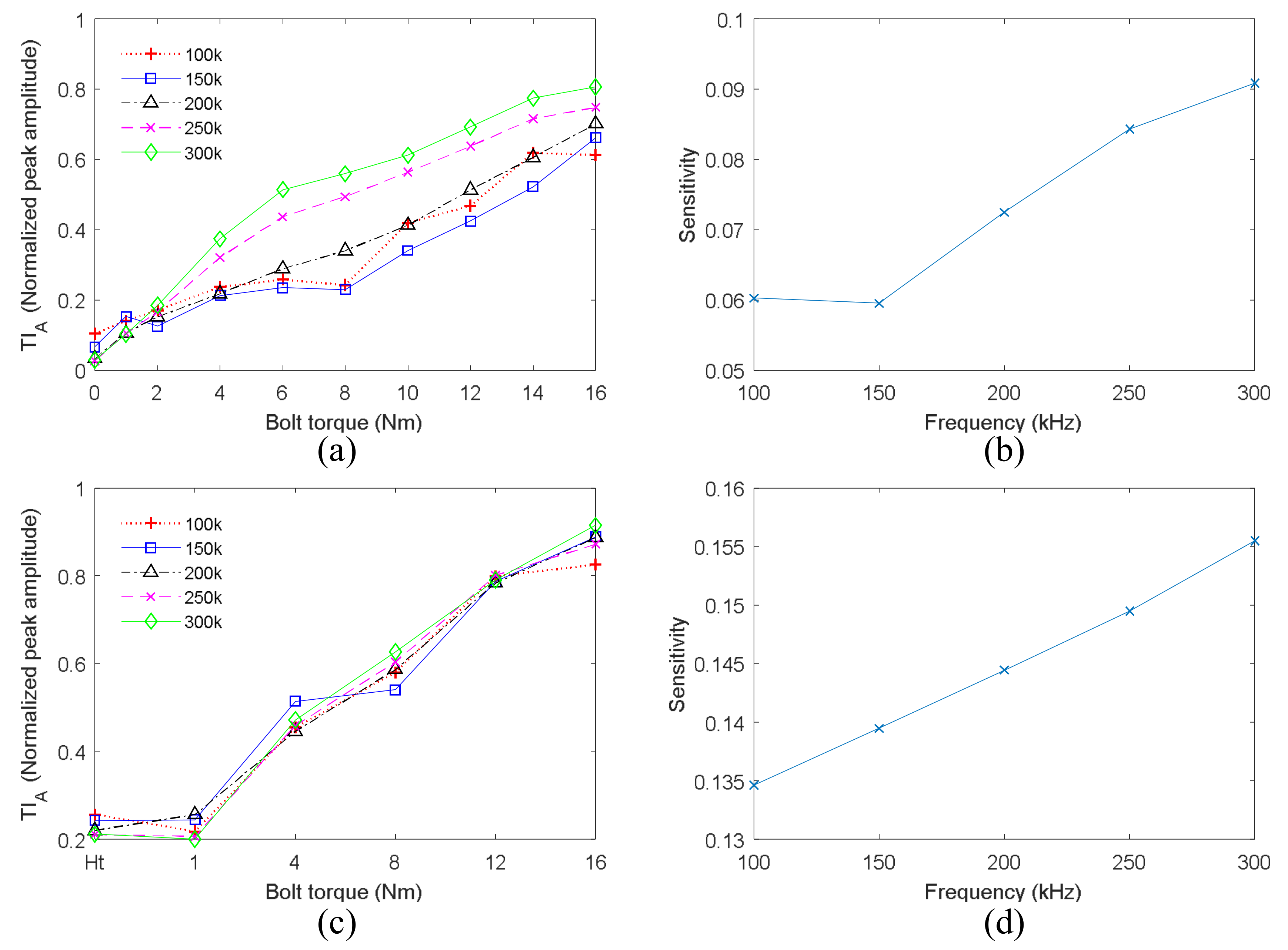
5.1. The Effect of Frequency
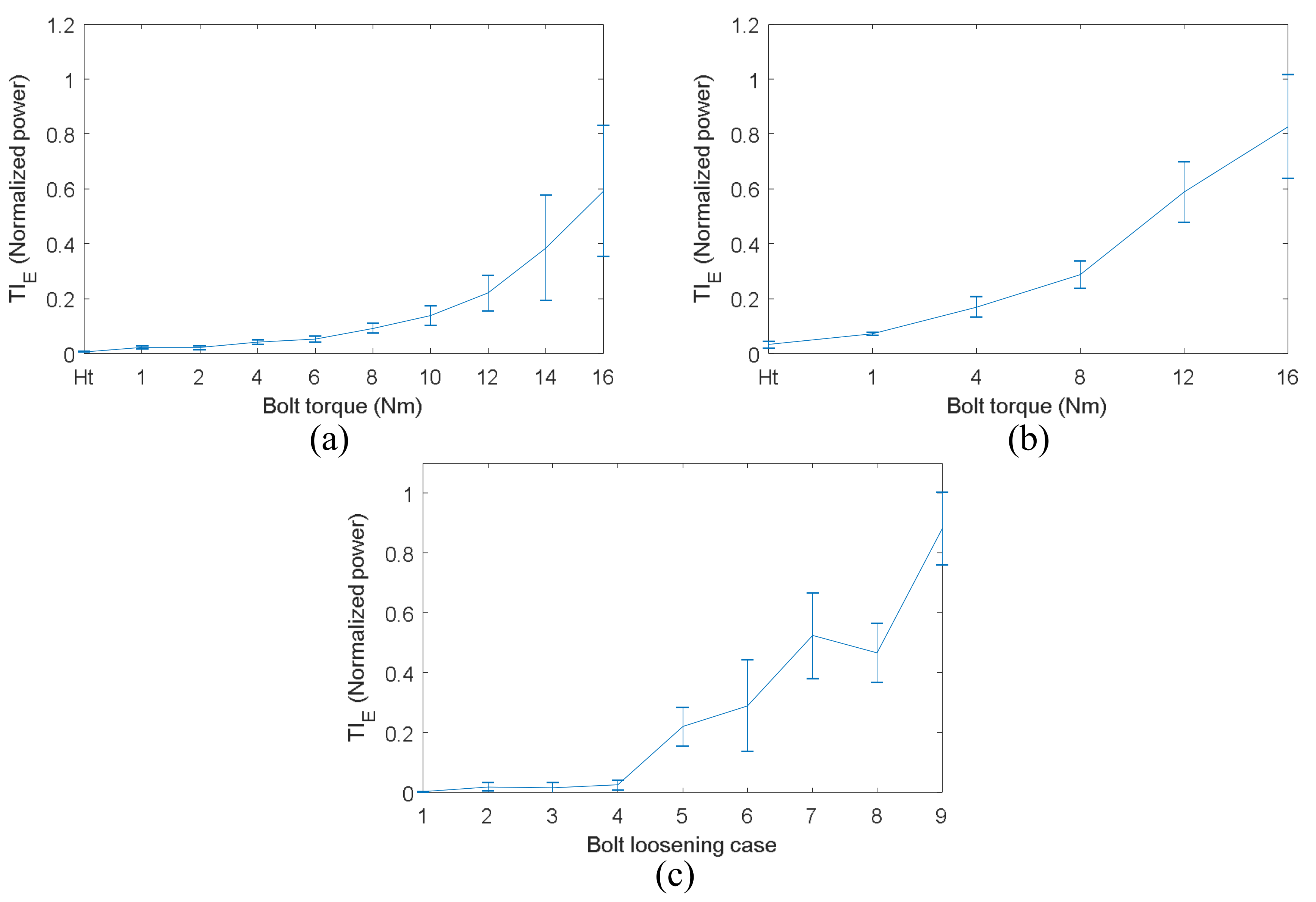
5.2. The Selection of Tightness Index
6. Conclusions
- (1)
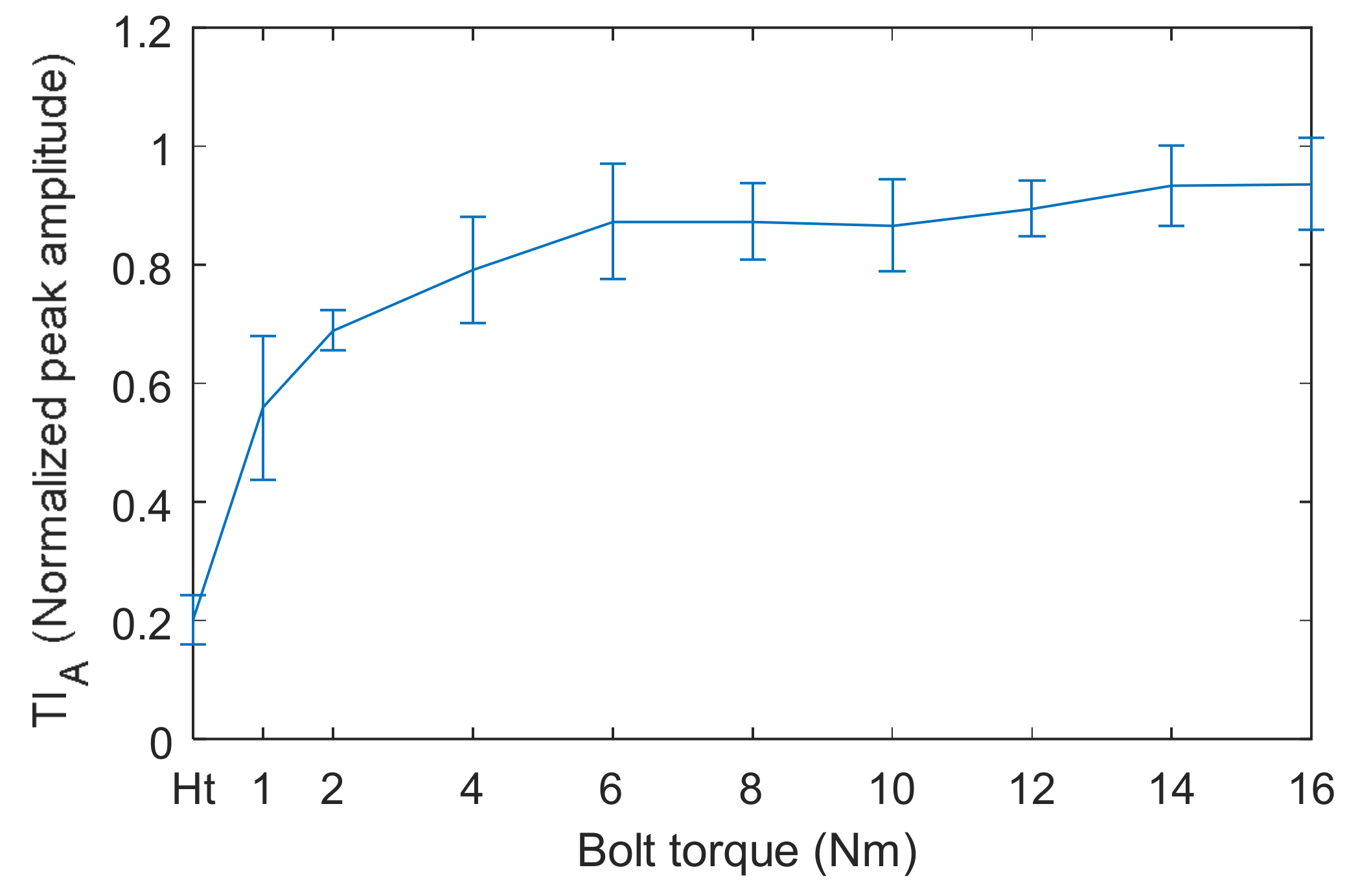
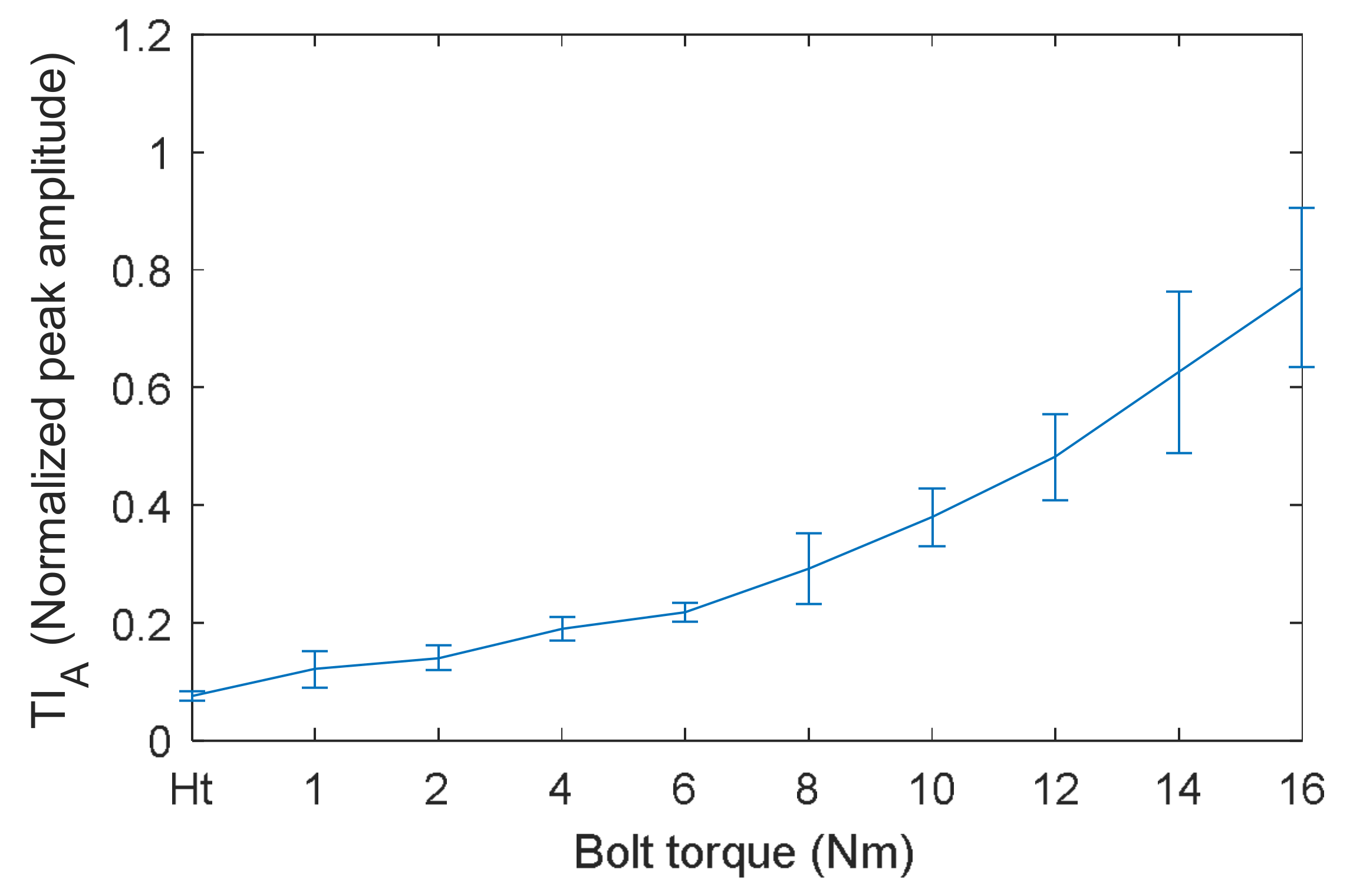
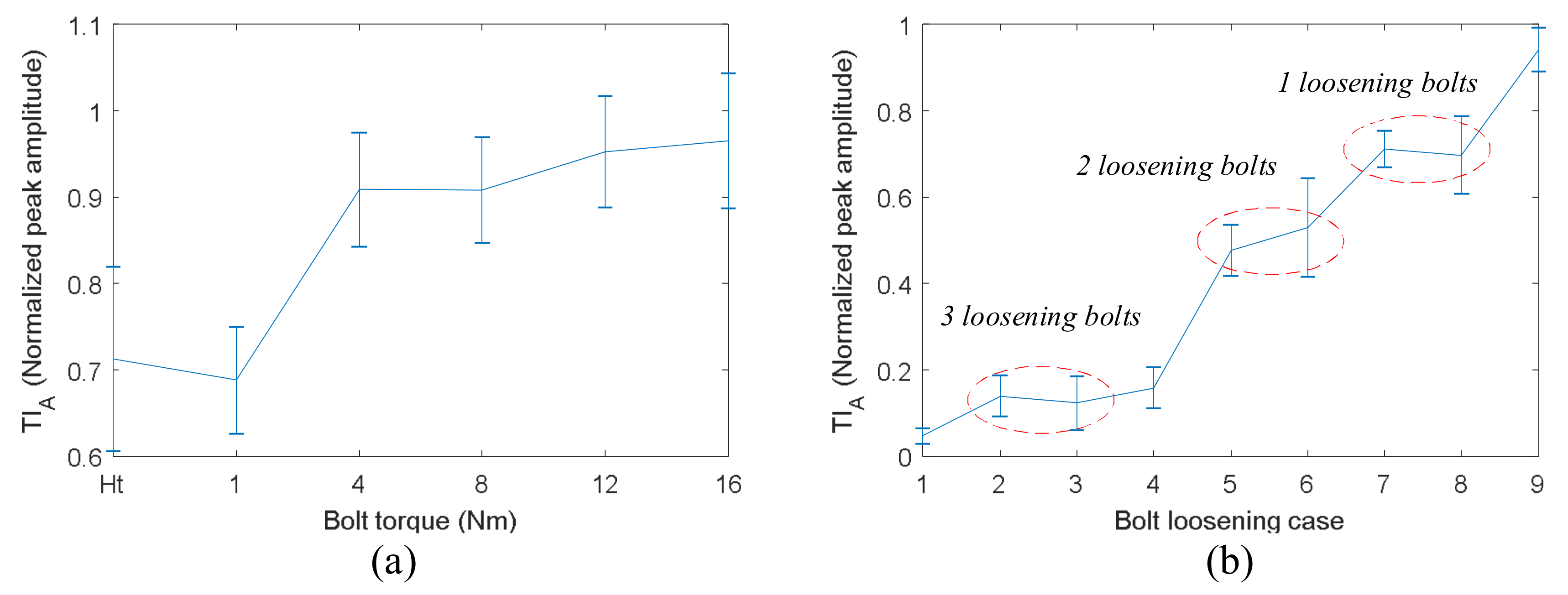
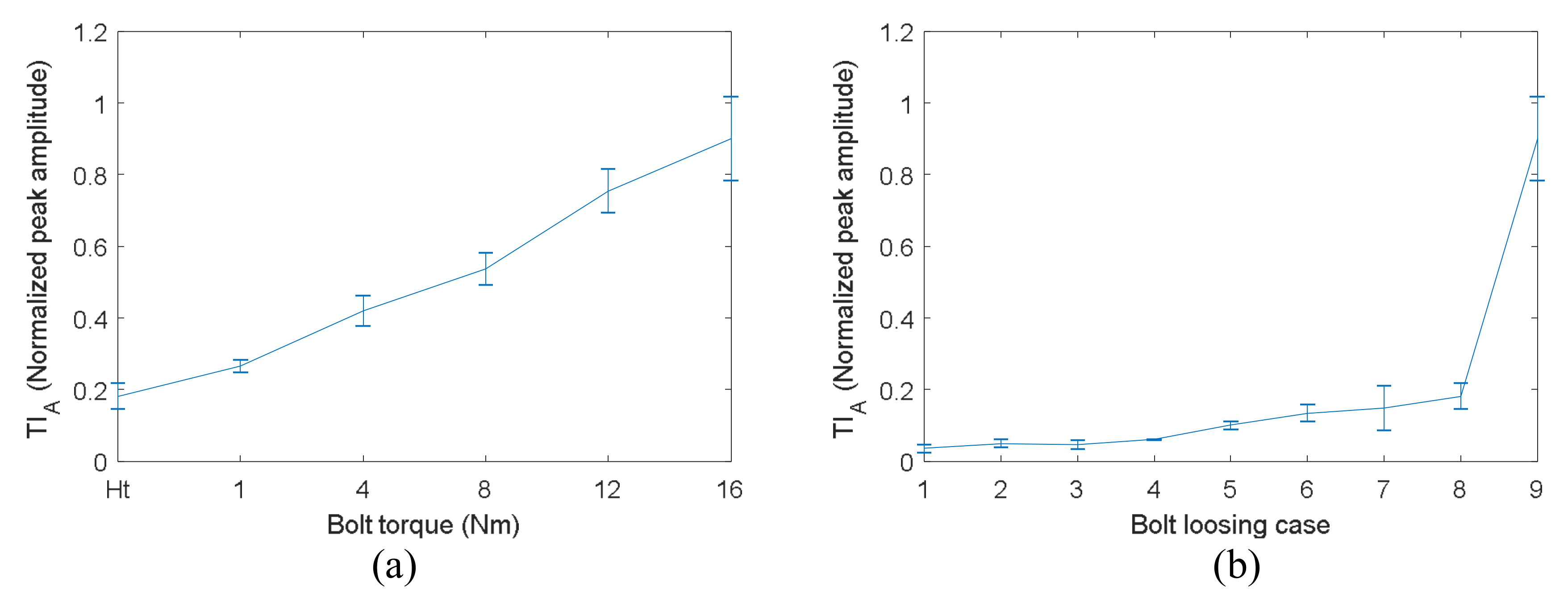
- The relationship between bolt torque and the peak amplitude of refocused wave packet measured by the VTR method is almost linear. Preload detection sensitivity is improved significantly compared with the TR method, especially at early stage of bolt loosening. The saturation phenomenon is completely overcome by the VTR method. The main reason is that both the amplitude and phase of time reversal operator in VTR change with bolt preload. Hence, the bolt preload not only affects the amplitude of wave packets, but also the refocusing capability.
- (2)
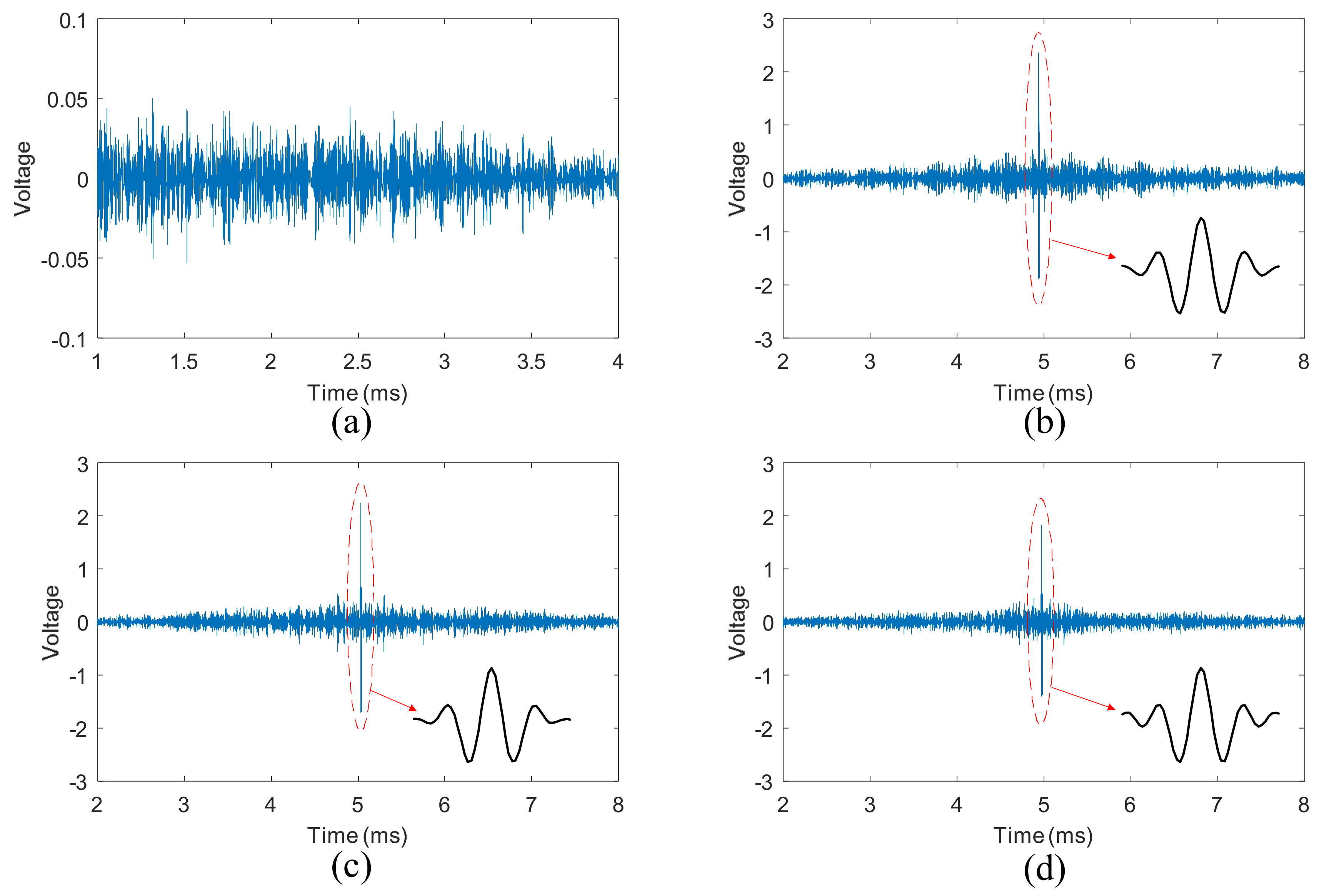
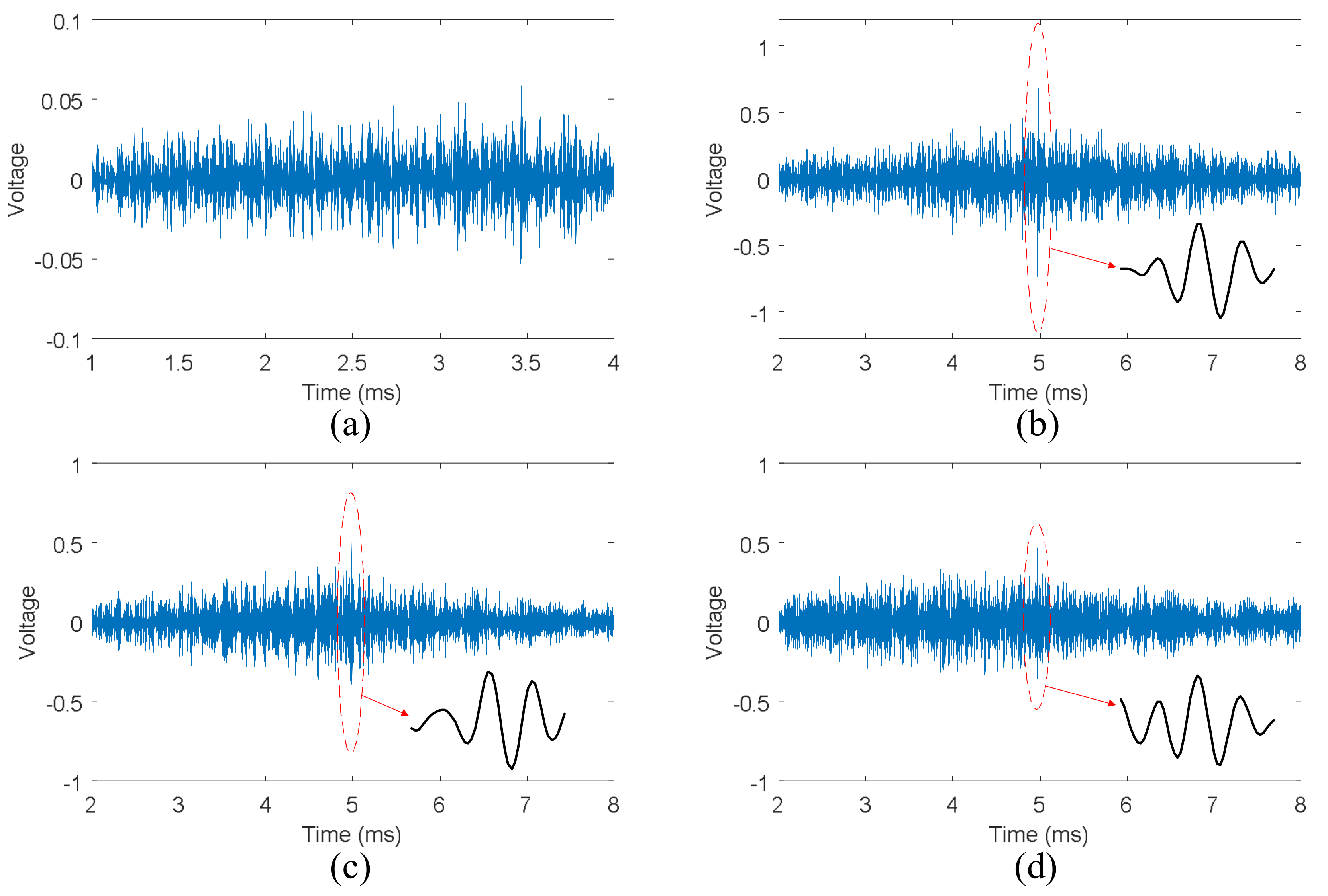
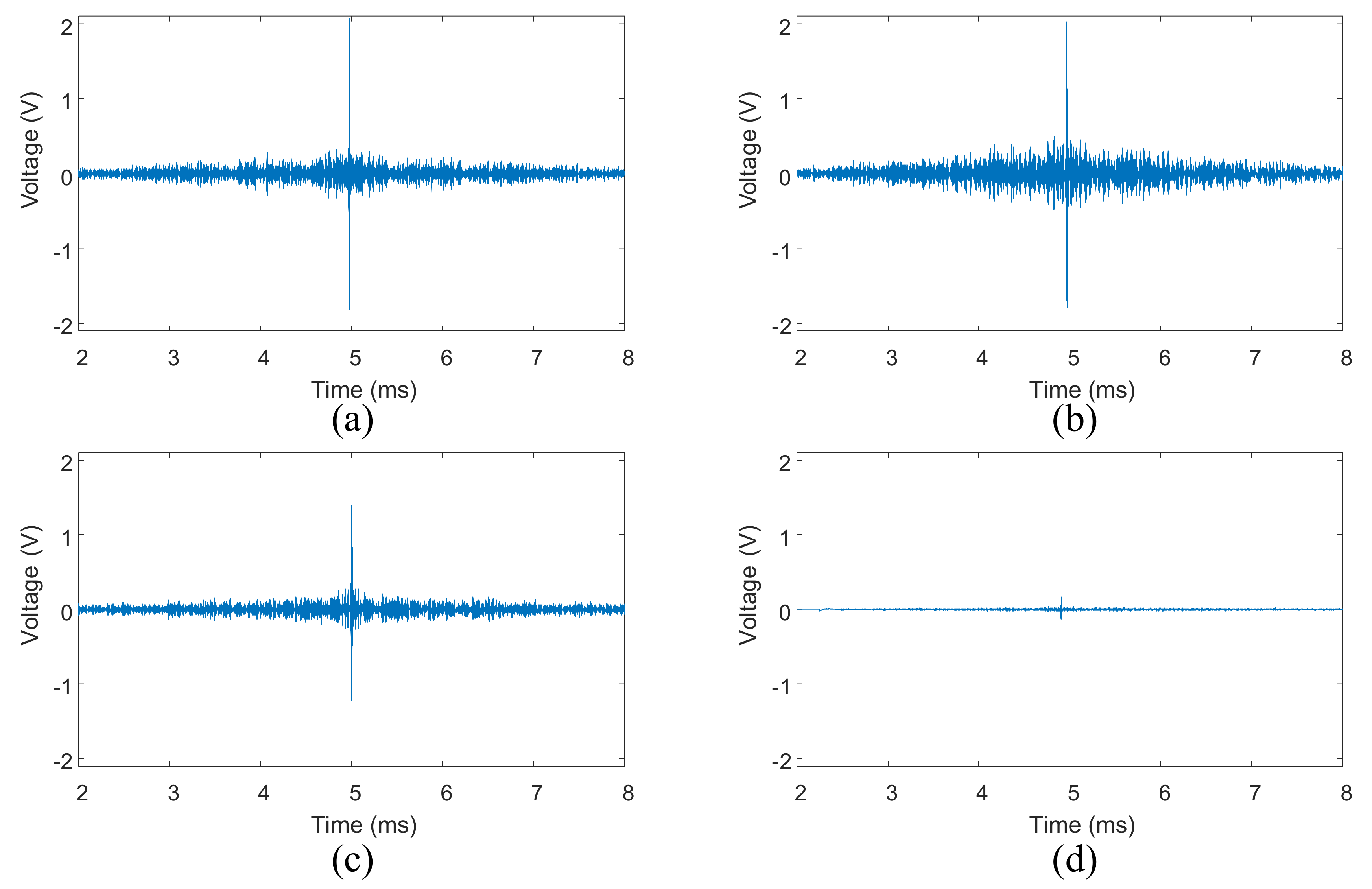
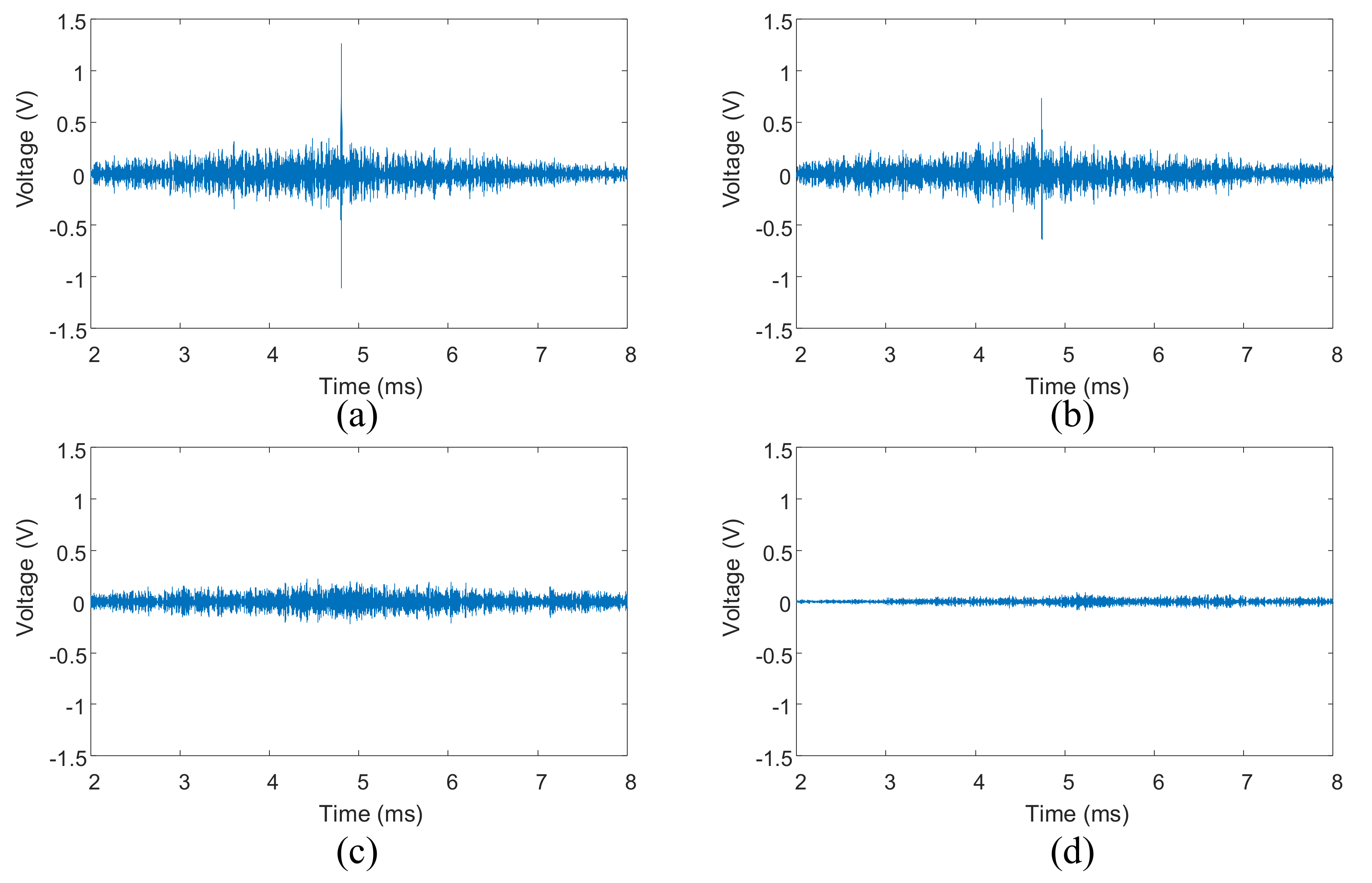
- For the VTR method, the original excitation tone burst signal can be refocused at the original source point when the bolt torque is close to healthy state. Nevertheless, the shape of the refocused signal is different from the tone burst signal. In addition, the VTR method almost loses refocusing capability when the loosening bolt number increases to 2. The results also show that the TR method is an effective method for detection of the number of loosening bolts.
- (3)
- The selections of guided wave frequency and tightness index are discussed. Detection sensitivity of VTR and TR methods generally increases with ultrasound frequency. The main reason is that ultrasound wave with smaller wavelength is more sensitive to true contact area, and the wavelength of the selected lamb wave decreases significantly with frequency. In addition, both wave energy and peak amplitude of refocused wave packet were used as tightness index. The sensitivity and accuracy of peak amplitude is better.
Author Contributions
Acknowledgments
Conflicts of Interest
References
- Zhu, L.; Hong, J.; Jiang, X. On controlling preload and estimating anti-loosening performance in threaded fasteners based on accurate contact modeling. Tribol. Int. 2016, 95, 181–191. [Google Scholar] [CrossRef]
- He, K.; Zhu, W.D. Detecting Loosening of Bolted Connections in a Pipeline Using Changes in Natural Frequencies. J. Vib. Acoust. 2014, 136, 8. [Google Scholar] [CrossRef]
- Giurgiutiu, V.; Lin, B.; Santoni-Bottai, G.; Cuc, A. Space application of piezoelectric wafer active sensors for structural health monitoring. J. Intell. Mater. Syst. Struct. 2011, 22, 1359–1370. [Google Scholar] [CrossRef]
- An, Y.K.; Sohn, H. Integrated impedance and guided wave based damage detection. Mech. Syst. Signal Process. 2012, 28, 50–62. [Google Scholar] [CrossRef]
- Perera, R.; Pérez, A.; García-Diéguez, M.; Zapico-Valle, J.L. Active Wireless System for Structural Health Monitoring Applications. Sensors 2017, 17, E2880. [Google Scholar] [CrossRef] [PubMed]
- Zagrai, A.; Doyle, D.; Gigineishvili, V. Piezoelectric wafer active sensor structural health monitoring of space structures. J. Intell. Mater. Syst. Struct. 2010, 21, 921–940. [Google Scholar] [CrossRef]
- Lowe, P.S.; Duan, W.; Kanfoud, J.; Gan, T.H. Structural Health Monitoring of Above-Ground Storage Tank Floors by Ultrasonic Guided Wave Excitation on the Tank Wall. Sensors 2017, 17. [Google Scholar] [CrossRef] [PubMed]
- Yang, J.; Chang, F.-K. Detection of bolt loosening in C–C composite thermal protection panels: I. Diagnostic principle. Smart Mater. Struct. 2006, 15, 581–590. [Google Scholar] [CrossRef]
- Wang, T.; Song, G.; Wang, Z.; Li, Y. Proof-of-concept study of monitoring bolt connection status using a piezoelectric based active sensing method. Smart Mater. Struct. 2013, 22. [Google Scholar] [CrossRef]
- Amerini, F.; Meo, M. Structural health monitoring of bolted joints using linear and nonlinear acoustic/ultrasound methods. Struct. Health Monit. 2011, 10, 659–672. [Google Scholar] [CrossRef]
- Yang, B.; Xuan, F.Z.; Xiang, Y.; Li, D.; Zhu, W.; Tang, X.; Xu, J.; Yang, K.; Luo, C. Lamb Wave-Based Structural Health Monitoring on Composite Bolted Joints under Tensile Load. Materials 2017, 10, 652. [Google Scholar] [CrossRef] [PubMed]
- Haynes, C.; Yeager, M.; Todd, M.; Lee, J.-R. Health Monitoring of Structural and Biological Systems 2014. In Monitoring Bolt Torque Levels through Signal Processing of Full-Field Ultrasonic Data; International Society for Optics and Photonics: Bellingham, WA, USA, 2014. [Google Scholar]
- Dworakowski, Z.; Ambrozinski, L.; Stepinski, T. Multi-stage temperature compensation method for Lamb wave measurements. J. Sound Vib. 2016, 382, 328–339. [Google Scholar] [CrossRef]
- Kedra, R.; Rucka, M. Research on assessment of bolted joint state using elastic wave propagation. J. Phys. Conf. Ser. 2015, 628. [Google Scholar] [CrossRef]
- Zagrai, A.; Doyle, D.; Arritt, B. Embedded nonlinear ultrasonics for structural health monitoring of satellite joints. Proc. SPIE 2008, 6935. [Google Scholar] [CrossRef]
- Doyle, D.; Zagrai, A.; Arritt, B.; Çakan, H. Damage detection in bolted space structures. J. Intell. Mater. Syst. Struct. 2010, 21, 251–264. [Google Scholar] [CrossRef]
- Doyle, D.; Zagrai, A.; Arritt, B. Bolted joint integrity for structural health monitoring of responsive space satellites. In Proceedings of the 50th AIAA SDM Conference, Palm Springs, CA, USA, 5 May 2009. [Google Scholar]
- Ing, R.K.; Fink, M. Time-reversed Lamb waves. In IEEE Transactions on Ultrasonics, Ferroelectrics, and Frequency Control; IEEE: Piscataway, NJ, USA, 1998. [Google Scholar]
- Watkins, R.; Jha, R. A modified time reversal method for Lamb wave based diagnostics of composite structures. Mech. Syst. Signal Process. 2012, 31, 345–354. [Google Scholar] [CrossRef]
- Cai, J.; Shi, L.; Yuan, S.; Shao, Z. High spatial resolution imaging for structural health monitoring based on virtual time reversal. Smart Mater. Struct. 2011, 20. [Google Scholar] [CrossRef]
- Poddar, B.; Kumar, A.; Mitra, M.; Mujumdar, P.M. Time reversibility of a Lamb wave for damage detection in a metallic plate. Smart Mater. Struct. 2011, 20. [Google Scholar] [CrossRef]
- Zeng, L.; Lin, J.; Huang, L.; Zhao, M. Amplitude Dispersion Compensation for Damage Detection Using Ultrasonic Guided Waves. Sensors 2016, 16, E1623. [Google Scholar] [CrossRef] [PubMed]
- Park, H.W.; Sohn, H.; Law, K.H.; Farrar, C.R. Time reversal active sensing for health monitoring of a composite plate. J. Sound Vib. 2007, 302, 50–66. [Google Scholar] [CrossRef]
- Zeng, L.; Lin, J.; Huang, L. A Modified Lamb Wave Time-Reversal Method for Health Monitoring of Composite Structures. Sensors 2017, 17. [Google Scholar] [CrossRef] [PubMed]
- Parvasi, S.M.; Ho, S.C.M.; Kong, Q.; Mousavi, R.; Song, G. Real time bolt preload monitoring using piezoceramic transducers and time reversal technique—A numerical study with experimental verification. Smart Mater. Struct. 2016, 25. [Google Scholar] [CrossRef]
- Wang, T.; Liu, S.; Shao, J.; Li, Y. Health monitoring of bolted joints using the time reversal method and piezoelectric transducers. Smart Mater. Struct. 2016, 25. [Google Scholar] [CrossRef]
- Jalalpour, M.; El-Osery, A.I.; Austin, E.M.; Reda Taha, M.M. Health monitoring of 90° bolted joints using fuzzy pattern recognition of ultrasonic signals. Smart Mater. Struct. 2014, 23. [Google Scholar] [CrossRef]
- He, K.; Zhu, W.D. Finite Element Modeling of Structures with L-Shaped Beams and Bolted Joints. J. Vib. Acoust. 2011, 133, 781–798. [Google Scholar] [CrossRef]
- Montoya, A.C.; Maji, A.K. An Assessment of Joint Rigidity with Ultrasonic Wave Energy. J. Nondestruct. Eval. 2011, 30, 122–129. [Google Scholar] [CrossRef]
- Montoya, A.; Doyle, D.; Maji, A.; Dumm, H.-P. Ultrasonic Evaluation of Bolted Connections in Satellites. Res. Nondestruct. Eval. 2014, 25, 44–62. [Google Scholar] [CrossRef]
- Park, H.W.; Kim, S.B.; Sohn, H. Understanding a time reversal process in Lamb wave propagation. Wave Motion 2009, 46, 451–467. [Google Scholar] [CrossRef]
- Xu, B.; Giurgiutiu, V. Single Mode Tuning Effects on Lamb Wave Time Reversal with Piezoelectric Wafer Active Sensors for Structural Health Monitoring. J. Nondestruct. Eval. 2007, 26, 123–134. [Google Scholar] [CrossRef] [Green Version]
- Zeng, L.; Lin, J.; Bao, J.; Joseph, R.P.; Huang, L. Spatial resolution improvement for Lamb wave-based damage detection using frequency dependency compensation. J. Sound Vib. 2017, 394, 130–145. [Google Scholar] [CrossRef]
- Lin, Q.; Li, B. Comparison of the influences of surface texture and boundary slip on tribological performances. Math. Probl. Eng. 2015. [Google Scholar] [CrossRef]
- Herdovics, B.; Cegla, F. Compensation of phase response changes in ultrasonic transducers caused by temperature variations. Struct. Health Monit. 2018. [Google Scholar] [CrossRef] [Green Version]
- Guo, J.; Li, B.; Liu, Z.; Hong, J.; Wu, X. Integration of geometric variation and part deformation into variation propagation of 3-D. assemblies. Int. J. Prod. Res. 2016, 54, 5708–5721. [Google Scholar] [CrossRef]
- Du, F.; Li, B.; Hong, J. Application of ultrasound technique to evaluate contact condition on the faying surface of riveted joints. J. Eng. Tribol. 2015, 229. [Google Scholar] [CrossRef]
- Sevillano, E.; Sun, R.; Perera, R. Damage detection based on power dissipation measured with PZT sensors through the combination of electro-mechanical impedances and guided waves. Sensors 2016, 16, 639. [Google Scholar] [CrossRef] [PubMed]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Case Number | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 |
|---|---|---|---|---|---|---|---|---|---|
| Hand tight bolt | All | 2,3,4 | 1,2,3 | 1,2 | 2,3 | 1,3 | 4 | 2 | None |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Du, F.; Xu, C.; Wu, G.; Zhang, J. Preload Monitoring of Bolted L-Shaped Lap Joints Using Virtual Time Reversal Method. Sensors 2018, 18, 1928. https://doi.org/10.3390/s18061928
Du F, Xu C, Wu G, Zhang J. Preload Monitoring of Bolted L-Shaped Lap Joints Using Virtual Time Reversal Method. Sensors. 2018; 18(6):1928. https://doi.org/10.3390/s18061928
Chicago/Turabian StyleDu, Fei, Chao Xu, Guannan Wu, and Jie Zhang. 2018. "Preload Monitoring of Bolted L-Shaped Lap Joints Using Virtual Time Reversal Method" Sensors 18, no. 6: 1928. https://doi.org/10.3390/s18061928
APA StyleDu, F., Xu, C., Wu, G., & Zhang, J. (2018). Preload Monitoring of Bolted L-Shaped Lap Joints Using Virtual Time Reversal Method. Sensors, 18(6), 1928. https://doi.org/10.3390/s18061928