Fusion of Infrared Thermal Image and Visible Image for 3D Thermal Model Reconstruction Using Smartphone Sensors



Abstract
:1. Introduction
2. Experimental Equipment
3. Methodology
3.1. Image Calibration
3.1.1. Normalization of Sensed Temperature
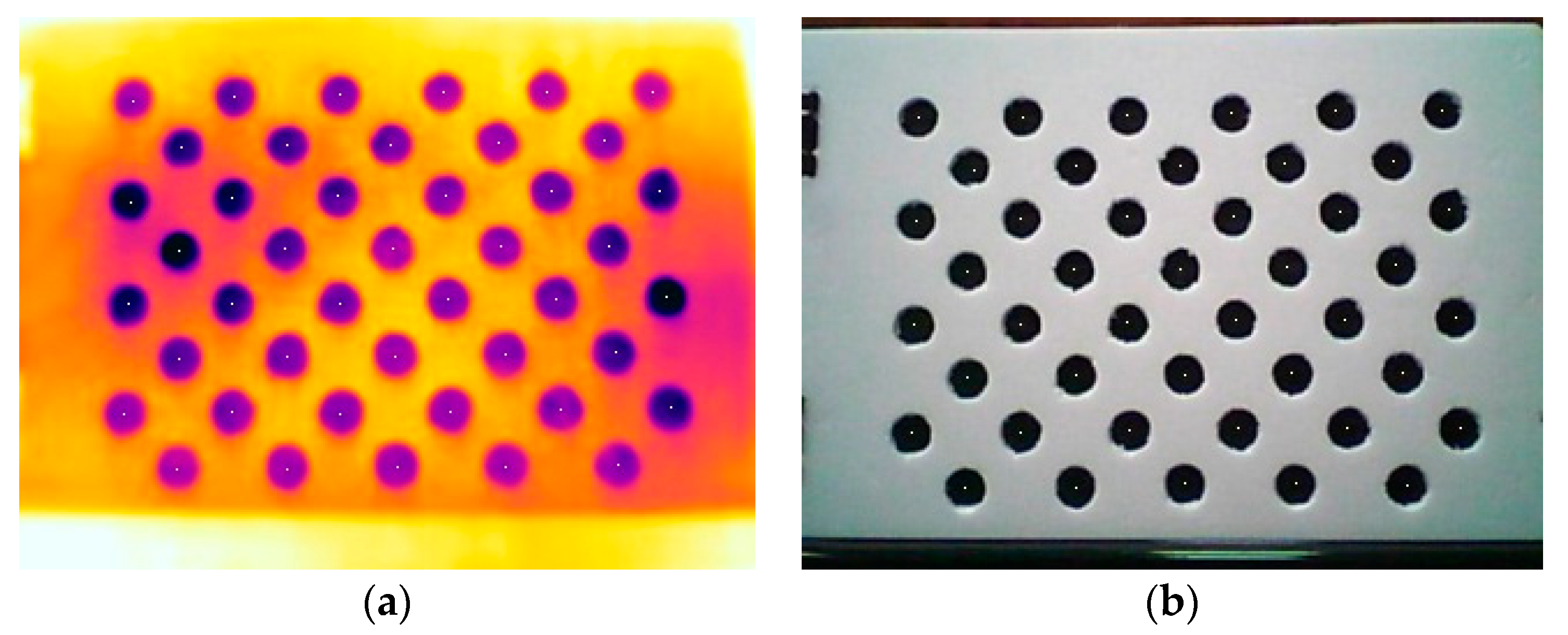
3.1.2. Geometric Translation
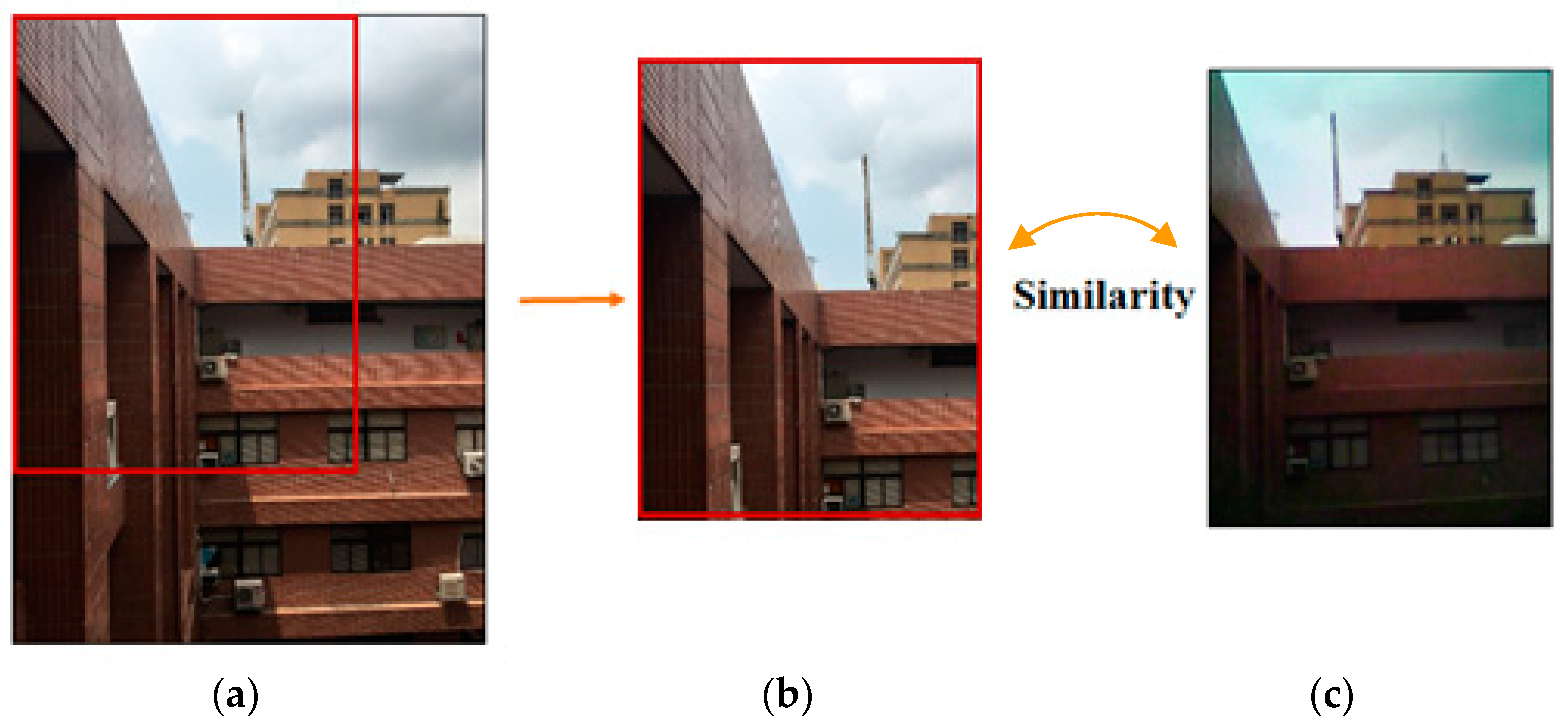
3.1.3. Image Registration
3.2. 3D Thermal Model Reconstruction
3.2.1. Extraction of Conjugate Features and Image Piecing
3.2.2. Structure from Motion (SFM)
3.2.3. Production of Dense Point Cloud
3.2.4. Creation of Geometric Entity
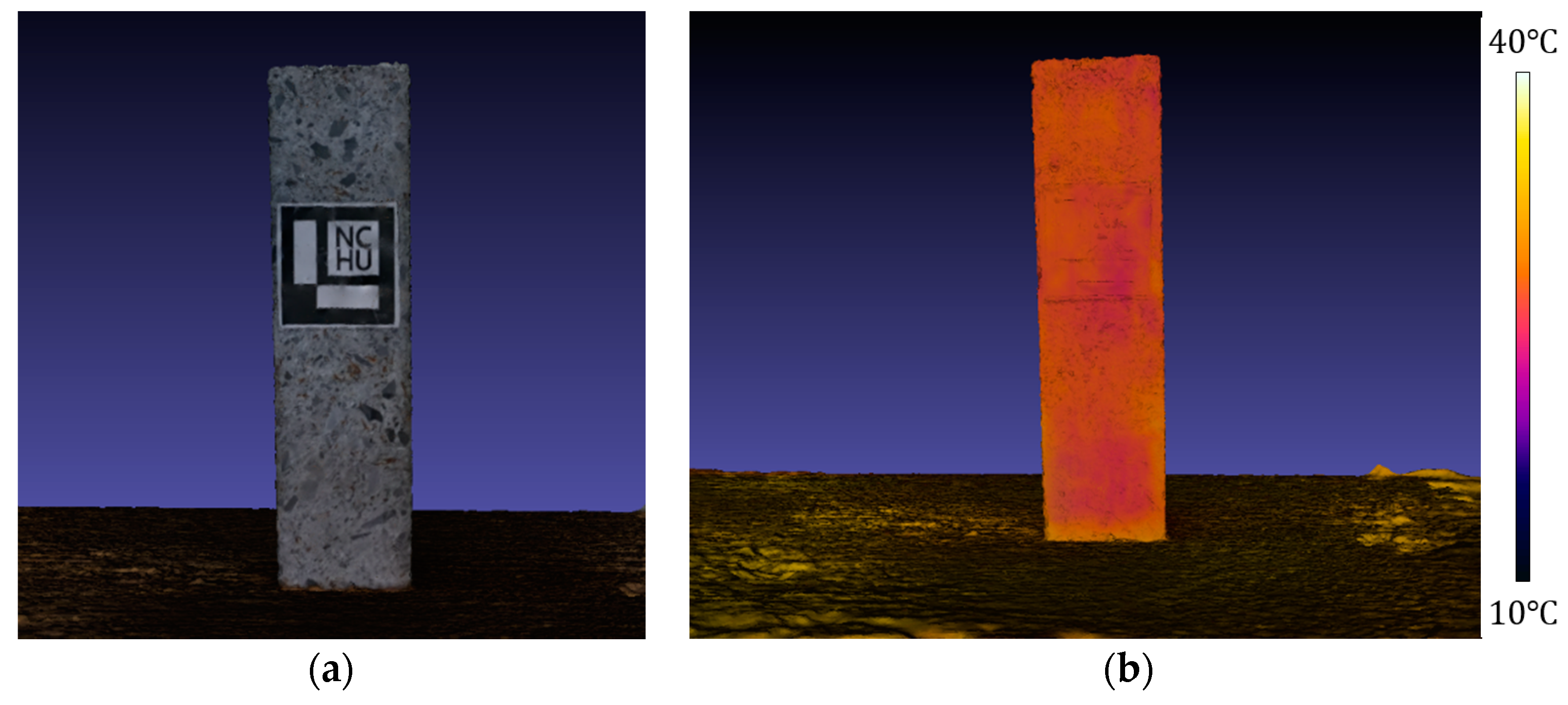
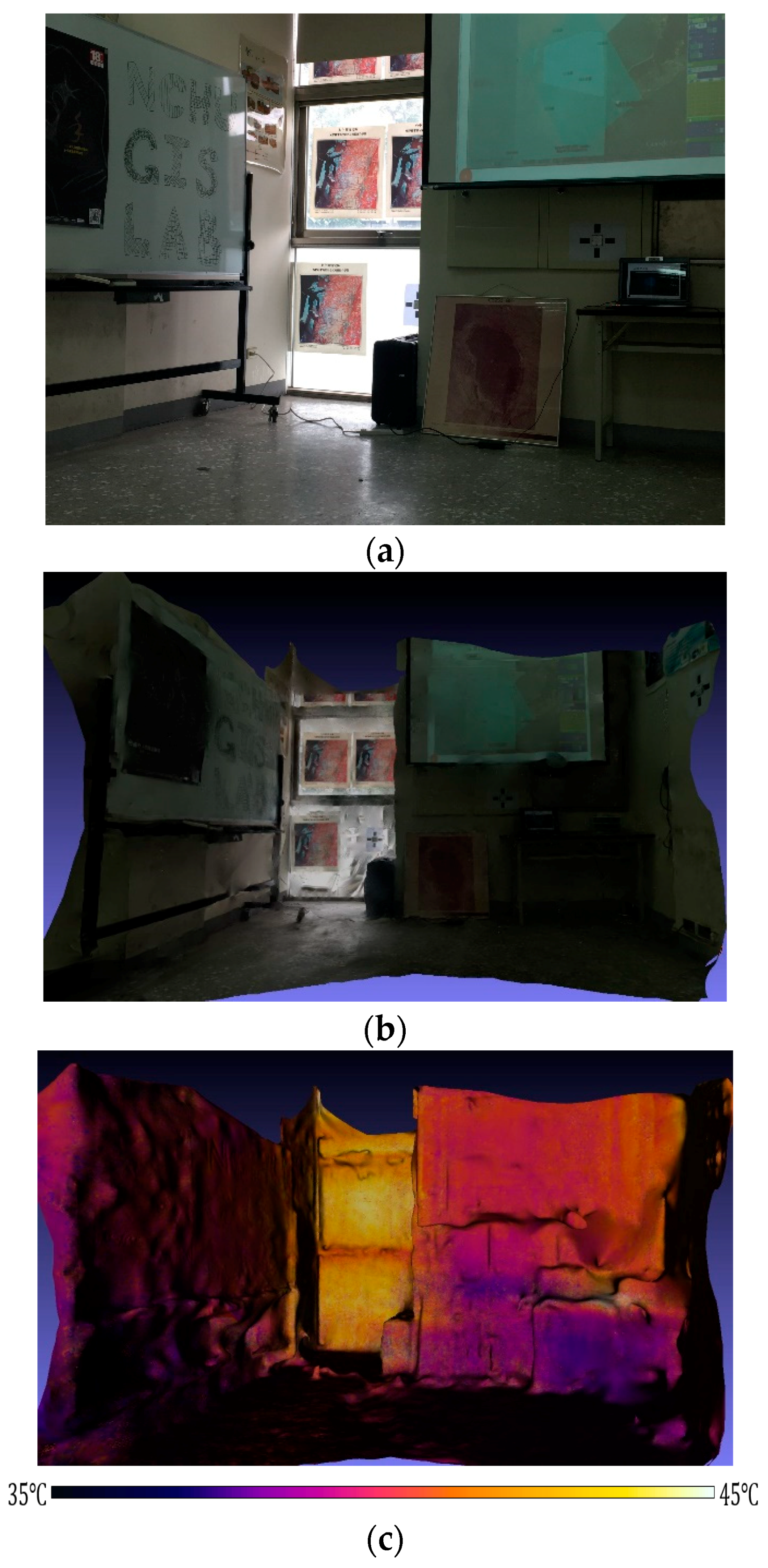
3.2.5. Temperature Information Texturing
4. Results and Discussion
4.1. Geometric Translation of Double Lenses of FLIR ONE
4.2. Image Registration of Visible Images of FLIR ONE and iPhone SE Images
4.3. 3D Thermal Model Reconstruction
4.4. Computational Time
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Oliveira, M.M. Image-based modeling and rendering techniques: A survey. RITA 2002, 9, 37–66. [Google Scholar]
- Yang, M.D.; Chao, C.F.; Lu, L.Y.; Huang, K.S.; Chen, Y.P. Image-based 3D scene reconstruction and exploration in augmented reality. Autom. Constr. 2013, 33, 48–60. [Google Scholar] [CrossRef]
- Nguyen, T.T.; Slaughter, D.C.; Max, N.; Maloof, J.N.; Sinha, N. Structured light-based 3D reconstruction system for plants. Sensors 2015, 15, 18587–18612. [Google Scholar] [CrossRef] [PubMed]
- Yandún Narváez, F.J.; Salvo del Pedregal, J.; Prieto, P.A.; Torres-Torriti, M.; AuatCheein, F.A. LiDAR and thermal images fusion for ground-based 3D characterisation of fruit trees. Biosyst. Eng. 2016, 151, 479–494. [Google Scholar] [CrossRef]
- Lowe, D.G. Distinctive image features from scale-invariant keypoints. Int. J. Comput. Vis. 2004, 60, 91–110. [Google Scholar] [CrossRef]
- Yang, Z. Fast Template Matching Based on Normalized Cross Correlation with Centroid Bounding. In Proceedings of the 2010 International Conference on Measuring Technology and Mechatronics Automation (ICMTMA), Changsha, China, 13–14 March 2010. [Google Scholar]
- Wu, C. Towards Linear-time Incremental Structure from Motion. In Proceedings of the 2013 International Conference on 3D Vision (3DV 2013), Seattle, WA, USA, 29 June–1 July 2013. [Google Scholar]
- Jancosek, M.; Pajdla, T. Exploiting visibility information in surface reconstruction to preserve weakly supported surfaces. Int. Sch. Res. Not. 2014, 2014, 1–20. [Google Scholar] [CrossRef] [PubMed]
- Giuliani, G.; Dao, H.; De Bono, A.; Chatenoux, B.; Allenbach, K.; De Laborie, P.; Rodila, D.; Alexandris, N.; Peduzzi, P. Live monitoring of earth surface (LiMES): A framework for monitoring environmental changes from earth observations. Remote Sens. Environ. 2017, 202, 222–233. [Google Scholar] [CrossRef]
- Manzo, C.; Mei, A.; Zampetti, E.; Bassani, C.; Paciucci, L.; Manetti, P. Top-down approach from satellite to terrestrial rover application for environmental monitoring of landfills. Sci. Total Environ. 2017, 584–585, 1333–1348. [Google Scholar] [CrossRef] [PubMed]
- Gulbe, L.; Caune, V.; Korats, G. Urban area thermal monitoring: Liepaja case study using satellite and aerial thermal data. Int. J. Appl. Earth Obs. Geoinf. 2017, 63, 45–54. [Google Scholar] [CrossRef]
- Roca, D.; Lagüela, S.; Díaz-Vilariño, L.; Armesto, J.; Arias, P. Low-cost aerial unit for outdoor inspection of building façades. Autom. Constr. 2013, 36, 128–135. [Google Scholar] [CrossRef]
- Natephra, W.; Motamedi, A.; Fukuda, T.; Yabuki, N. Integrating building information modeling and virtual reality development engines for building indoor lighting design. Vis. Eng. 2017, 5, 1–21. [Google Scholar] [CrossRef]
- Iwaszczuk, D.; Stilla, U. Camera pose refinement by matching uncertain 3D building models with thermal infrared image sequences for high quality texture extraction. ISPRS J. Photogramm. Remote Sens. 2017, 132, 33–47. [Google Scholar] [CrossRef]
- Rea, P.; Ottaviano, E. Design and development of an Inspection Robotic System for indoor applications. Robot. Comput.-Integr. Manuf. 2018, 49, 143–151. [Google Scholar] [CrossRef]
- Merchán, P.; Adán, A.; Salamanca, S.; Domínguez, V.; Chacón, R. Geometric and colour data fusion for outdoor 3D models. Sensors 2012, 12, 6893–6919. [Google Scholar] [CrossRef]
- Costanzo, A.; Minasi, M.; Casula, G.; Musacchio, M.; Buongiorno, M.F. Combined use of terrestrial laser scanning and IR thermography applied to a historical building. Sensors 2015, 15, 194–213. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Wang, X.; Witz, J.F.; Bartali, A.E.; Jiang, C. Infrared thermography coupled with digital image correlation in studying plastic deformation on the mesoscale level. Opt. Lasers Eng. 2016, 86, 264–274. [Google Scholar] [CrossRef]
- Capozzoli, L.; Rizzo, E. Combined NDT techniques in civil engineering applications: Laboratory and real test. Constr. Build. Mater. 2017, 154, 1139–1150. [Google Scholar] [CrossRef]
- Yang, M.D.; Su, T.C. Segmenting ideal morphologies of sewer pipe defects on CCTV images for automated diagnosis. Expert Syst. Appl. 2009, 36, 3562–3573. [Google Scholar] [CrossRef]
- Yang, M.D.; Su, T.C.; Pan, N.F.; Yang, Y.F. Systematic image quality assessment for sewer inspection. Expert Syst. Appl. 2011, 38, 1766–1776. [Google Scholar] [CrossRef]
- Yang, M.D.; Su, T.C.; Pan, N.F.; Liu, P. Feature extraction of sewer pipe defects using wavelet transform and co-occurrence matrix. Int. J. Wavel. Multiresolut. Inf. Process. 2011, 9, 211–225. [Google Scholar] [CrossRef]
- Su, T.C.; Yang, M.D.; Wu, T.C.; Lin, J.Y. Morphological segmentation based on edge detection for sewer pipe defects on CCTV images. Expert Syst. Appl. 2011, 38, 13094–13114. [Google Scholar] [CrossRef]
- Lagüela, S.; Armesto, J.; Arias, P.; Herráez, J. Automation of thermographic 3D modelling through image fusion and image matching techniques. Autom. Constr. 2012, 27, 24–31. [Google Scholar] [CrossRef]
- Ham, Y.; Golparvar-Fard, M. An automated vision-based method for rapid 3D energy performance modeling of existing buildings using thermal and digital imagery. Adv. Eng. Inform. 2013, 27, 395–409. [Google Scholar] [CrossRef]
- Rangel, J.; Soldan, S.; Kroll, A. 3D Thermal Imaging: Fusion of Thermography and Depth Cameras. In Proceedings of the 12th International Conference on Quantitative InfraRed Thermography (QIRT), Bordeaux, France, 7–11 July 2014. [Google Scholar]
- Adán, A.; Prado, T.; Prieto, S.A.; Quintana, B. Fusion of Thermal Imagery and LiDAR Data for Generating TBIM Models. In Proceedings of the 2017 IEEE Sensors, Glasgow, UK, 29 October–1 November 2017. [Google Scholar]
- Schramm, S.; Rangel, J.; Kroll, A. Data Fusion for 3D Thermal Imaging Using Depth and Stereo Camera for Robust Self-localization. In Proceedings of the 2018 IEEE Sensors Applications Symposium (SAS), Seoul, Korea, 12–14 March 2018. [Google Scholar]
- Kazi, A.M.; Ali, M.; Ayub, K.; Kalimuddin, H.; Zubair, K.; Kazi, A.N.; Artani, A.; Ali, S.A. Geo-spatial reporting for monitoring of household immunization coverage through mobile phones: Findings from a feasibility study. Int. J. Med. Inform. 2017, 107, 48–55. [Google Scholar] [CrossRef] [PubMed]
- Matarazzo, T.; Vazifeh, M.; Pakzad, S.; Santi, P.; Ratti, C. Smartphone data streams for bridge health monitoring. Procedia Eng. 2017, 199, 966–971. [Google Scholar] [CrossRef]
- Zhang, H.; Wei, Q.; Jiang, Z. 3D reconstruction of space objects from multi-views by a visible sensor. Sensors 2017, 17, 1689. [Google Scholar] [CrossRef] [PubMed]
- Lu, Y.; Wu, Z.; Chang, R.; Li, Y. Building Information Modeling (BIM) for green buildings: A critical review and future directions. Autom. Constr. 2017, 83, 134–148. [Google Scholar] [CrossRef]
- Lin, Y.H.; Tsai, K.T.; Lin, M.D.; Yang, M.D. Design optimization of office building envelope configurations for energy conservation. Appl. Energy 2016, 171, 336–346. [Google Scholar] [CrossRef]
- Yang, M.D.; Lin, M.D.; Lin, Y.H.; Tsai, K.T. Multiobjective optimization design of green building envelope material using a non-dominated sorting genetic algorithm. Appl. Therm. Eng. 2017, 111, 1255–1264. [Google Scholar] [CrossRef]
- Rajeev, P.; Sanjayan, J.G.; Seenuth, S.S. Assessment of thermal cracking in concrete roof tiles. Mater. Des. 2016, 107, 470–477. [Google Scholar] [CrossRef]
- Li, R.; Zeng, B.; Liou, M.L. A new three-step search algorithm for block motion estimation. IEEE Trans. Circuits Syst. Video Technol. 1994, 4, 438–442. [Google Scholar] [CrossRef]
- Bracewell, R. The Fourier Transform and Its Applications, 1st ed.; McGraw-Hill: New York, NY, USA, 1965; pp. 46–243. [Google Scholar]
- Wolf, P.R.; Dewitt, B.A. Elements of Photogrammetry with Applications in GIS, 3rd ed.; McGraw-Hill: New York, NY, USA, 2000; p. 214. ISBN 0-07-118454-6. [Google Scholar]
- Yu, H.; Lin, Z.; Pan, F. Applications and improve of H.264 in medical video compression. IEEE Trans. Circuits Syst. I 2005, 52, 2707–2716. [Google Scholar] [CrossRef]
- Lakamsani, P.; Zeng, B.; Liou, M. An Enhanced Three Step Search Motion Estimation Method and Its VLSI Architecture. In Proceedings of the IEEE International Symposium on Circuits and Systems, Circuits and Systems Connecting the World (ISCAS 96), Atlanta, GA, USA, 15 May 1996. [Google Scholar]
- VisualSFM: A Visual Structure from Motion System. Available online: http://ccwu.me/vsfm/ (accessed on 5 June 2018).
- Open Multi-View Stereo Reconstruction Library. Available online: http://cdcseacave.github.io/openMVS/ (accessed on 5 June 2018).
- Snavely, N.; Seitz, S.M.; Szeliski, R. Modeling the world from internet photo collections. Int. J. Comput. Vis. 2008, 80, 189–210. [Google Scholar] [CrossRef]
- Hartley, R.; Zisserman, A. Multiple View Geometry in Computer Vision, 2nd ed.; Cambridge University Press: Cambridge, UK, 2004. [Google Scholar]
- Lourakis, M.I.A.; Argyros, A.A. SBA: A software package for generic sparse bundle adjustment. ACM Trans. Math. Softw. 2006, 36. [Google Scholar] [CrossRef]
- Barnes, C.; Shechtman, E.; Finkelstein, A.; Goldman, D.B. A Randomized Correspondence Algorithm for Structural Image Editing. In Proceedings of the ACM SIGGRAPH 2009, New York, NY, USA, 3–7 August 2009. [Google Scholar]
- Laurentini, A. The visual hull concept for silhouette-based image understanding. IEEE Trans. Pattern Anal. Mach. Intell. 1994, 16, 150–162. [Google Scholar] [CrossRef] [Green Version]
- Vu, H.-H.; Labatut, P.; Pons, J.-P.; Keriven, R. High accuracy and visibility-consistent dense multiview stereo. IEEE Trans. Pattern Anal. Mach. Intell. 2012, 34, 889–901. [Google Scholar] [CrossRef] [PubMed]
- Lillesand, T.M.; Kiefer, R.W.; Chipman, J.W. Remote Sensing and Image Interpretation, 6th ed.; John Wiley & Sons: Edison, NJ, USA, 2008; p. 356. ISBN 978-0-470-05245-7. [Google Scholar]
- Whelan, T.; Ma, L.; Bondarev, E.; de With, P.H.N.; McDonald, J. Incremental and batch planar simplification of dense point cloud maps. Robot. Auton. Syst. 2015, 69, 3–14. [Google Scholar] [CrossRef] [Green Version]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| ID of Pair of Images | Geometric Translation in the Column Direction (Pixels) | Geometric Translation in the Row Direction (Pixels) |
|---|---|---|
| IMG_L_1 | 3.579 | −1.289 |
| IMG_L_2 | 4.777 | −1.095 |
| IMG_L_3 | 6.805 | −3.532 |
| IMG_L_4 | 5.789 | −3.193 |
| IMG_L_5 | 3.153 | −1.238 |
| IMG_L_6 | 6.210 | −2.764 |
| IMG_L_7 | 4.446 | −2.374 |
| IMG_L_8 | 4.274 | −2.737 |
| IMG_L_9 | 4.498 | −2.684 |
| IMG_L_10 | 4.177 | −2.305 |
| Average | 4.771 | −2.321 |
| Down Sampling Percentage | RMSE (Pixels) |
|---|---|
| 8% | 15.712 |
| 9% | 3.403 |
| 10% | 9.560 |
| 20% | 211.380 |
| 30% | 427.958 |
| 40% | 856.391 |
| 50% | 1064.691 |
| Down Sampling Percentage | RMSE (Pixels) |
|---|---|
| 9.20% | 2.818 |
| 9.22% | 2.738 |
| 9.24% | 1.846 |
| 9.26% | 2.041 |
| 9.28% | 2.564 |
| 9.30% | 2.629 |
| 9.40% | 2.831 |
| 9.60% | 4.230 |
| 9.80% | 6.712 |
| Case | NCC | NCC + TSS | ||
|---|---|---|---|---|
| NCC Index | Computational Time (s) | NCC Index | Computational Time (s) | |
| I | 0.955 | 321.188 | 0.977 | 1.676 |
| II | 0.957 | 323.016 | 0.995 | 1.584 |
| III | 0.963 | 321.089 | 0.991 | 1.721 |
| Step | Small Scale Scene | Medial Scale Scene | Large Scale Scene | |||
|---|---|---|---|---|---|---|
| No.(I) 1 | CT(s) 2 | No.(I) 1 | CT(s) 2 | No.(I) 1 | CT(s) 2 | |
| 81 | 219 | 202 | 508 | 51 | 69 |
| 165 | 231 | 192 | |||
| 486 | 1686 | 1091 | |||
| 912 | 167 | 2365 | |||
| 2650 | 31,453 | 36,323 | |||
| 131 | 311 | 373 | |||
| Total | 4563 | 34,356 | 40,413 | |||
| Scene | Step | No. of Points | No. of Silhouette Cones |
|---|---|---|---|
| Small scale | Structure from motion | 46,911 | - |
| Production of dense point cloud | 377,785 | - | |
| Creation of geometric entity | - | 753,627 | |
| Medial scale | Structure from motion | 10,515 | - |
| Production of dense point cloud | 270,368 | - | |
| Creation of geometric entity | - | 540,022 | |
| Large scale | Structure from motion | 735,440 | - |
| Production of dense point cloud | 13,587,715 | - | |
| Creation of geometric entity | - | 509,281 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, M.-D.; Su, T.-C.; Lin, H.-Y. Fusion of Infrared Thermal Image and Visible Image for 3D Thermal Model Reconstruction Using Smartphone Sensors. Sensors 2018, 18, 2003. https://doi.org/10.3390/s18072003
Yang M-D, Su T-C, Lin H-Y. Fusion of Infrared Thermal Image and Visible Image for 3D Thermal Model Reconstruction Using Smartphone Sensors. Sensors. 2018; 18(7):2003. https://doi.org/10.3390/s18072003
Chicago/Turabian StyleYang, Ming-Der, Tung-Ching Su, and Hung-Yu Lin. 2018. "Fusion of Infrared Thermal Image and Visible Image for 3D Thermal Model Reconstruction Using Smartphone Sensors" Sensors 18, no. 7: 2003. https://doi.org/10.3390/s18072003
APA StyleYang, M. -D., Su, T. -C., & Lin, H. -Y. (2018). Fusion of Infrared Thermal Image and Visible Image for 3D Thermal Model Reconstruction Using Smartphone Sensors. Sensors, 18(7), 2003. https://doi.org/10.3390/s18072003