Rub-Impact Fault Diagnosis Using an Effective IMF Selection Technique in Ensemble Empirical Mode Decomposition and Hybrid Feature Models





Abstract
:1. Introduction
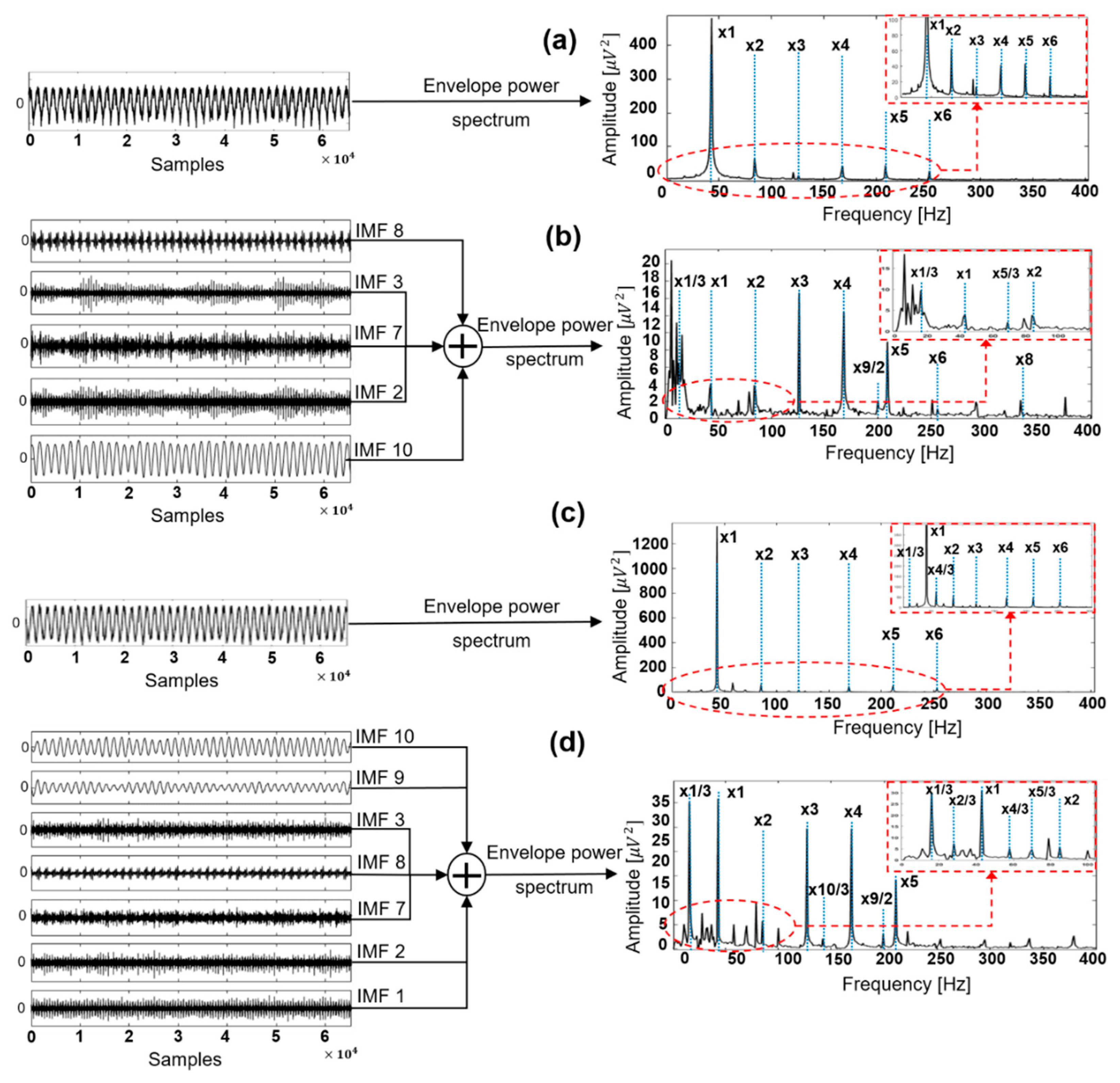
- This paper presents a new informative IMF selection procedure that can be used to select the modes obtained by EEMD in rubbing fault analysis. The proposed method includes a new quality criterion for mode evaluation that combines the degree-of-presence ratio (DPR) of rub impact and the Kullback–Leibler divergence (KLD), a statistical similarity metric [34]. An adaptive selection technique then utilizes a thresholding approach and the aforementioned criterion to adaptively select the most valuable IMFs. The selected informative signal-dominant IMFs carry intrinsic information about the important harmonics of rub-impact faults.
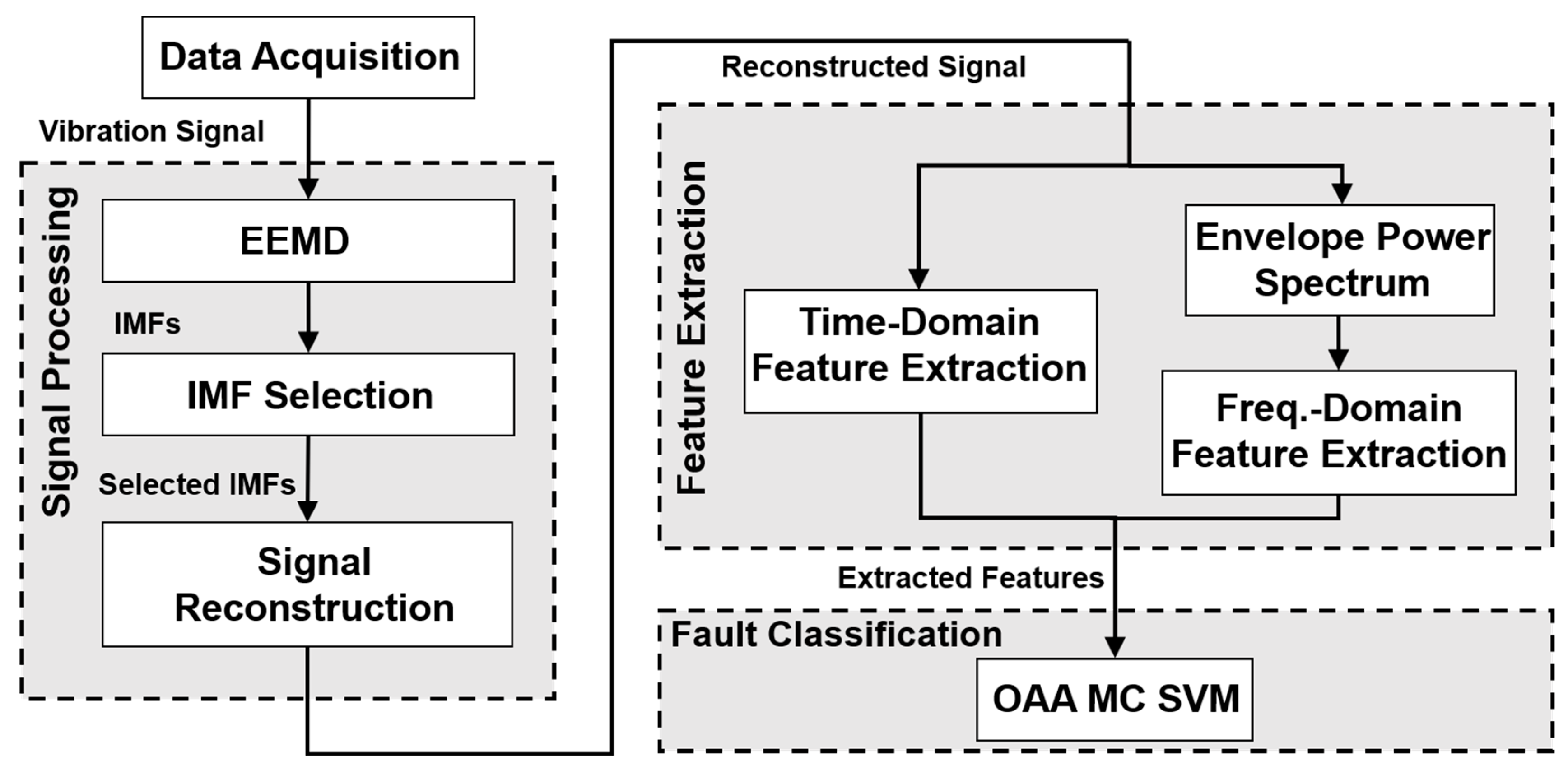
- Since the selected IMFs are highly effective at detecting rub-impact phenomena, this paper then extracts features for rub-impact fault diagnosis from the signal reconstructed using the selected components. Thus, a hybrid feature model that well-represents rub-impact fault conditions is presented in this study. Our hybrid feature model consists of four features directly extracted from the reconstructed signal in the time domain and three features extracted from the envelope power spectrum of this signal. This hybrid set of features is highly effective for representing each rub-impact fault condition, so these features are further used in a classifier for diagnosing rubbing faults with various intensities.
2. Proposed Rub-Impact Fault Feature Extraction Technique
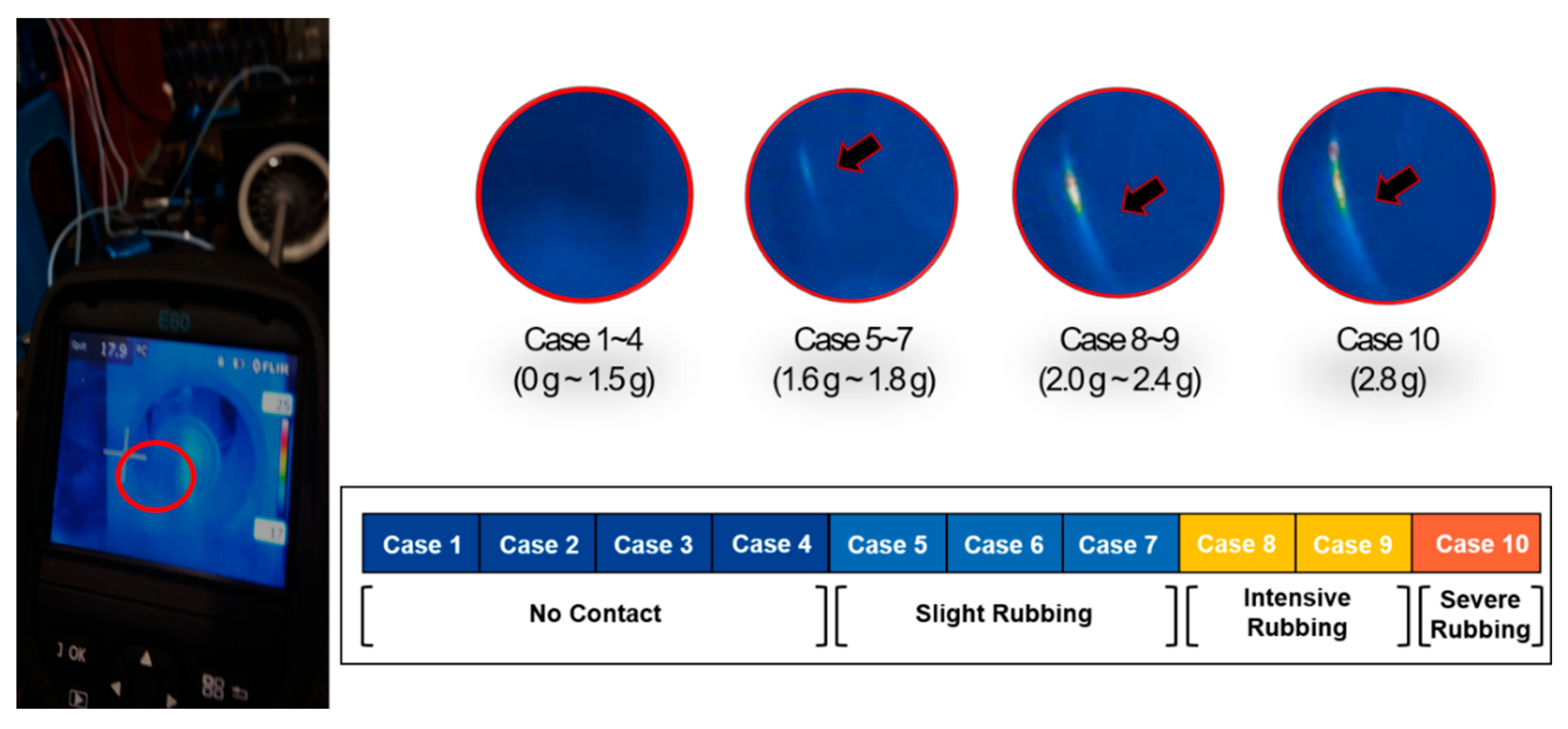
2.1. Data Acquisition
2.2. Empirical Mode Decomposition and Its Variant
2.2.1. Empirical Mode Decomposition
2.2.2. Ensemble Empirical Mode Decomposition
| Algorithm 1: EEMD Algorithm |
|
2.3. IMF Selection Procedure for Rubbing Fault Diagnosis
2.4. Feature Extraction and Configuration of Feature Set
3. Experimental Results and Discussion
3.1. Training and Testing Data Configuration
3.2. Validation of the Selected IMFs Using the Proposed Approach
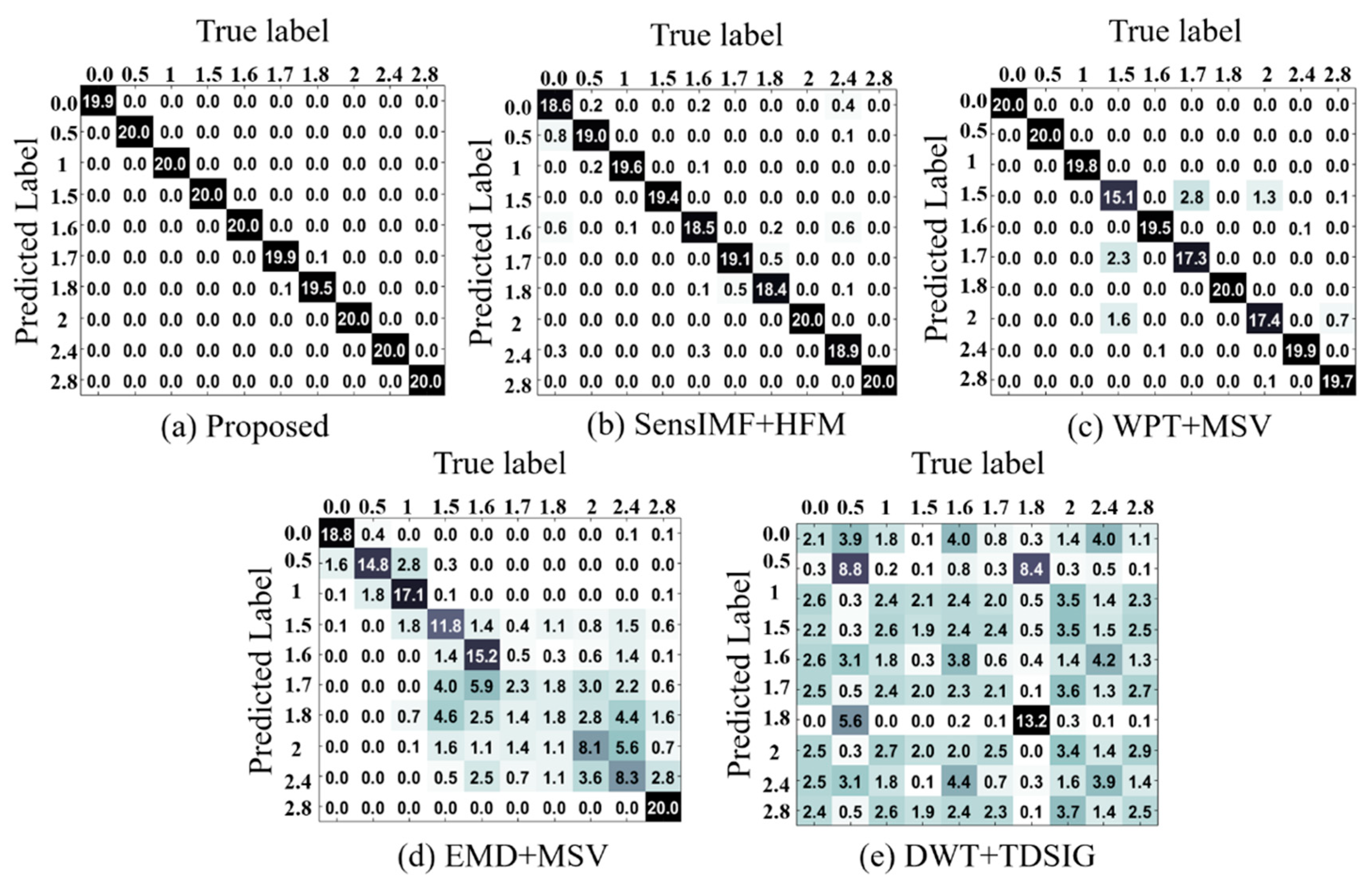
3.3. Performance Evaluation of the Proposed Rubbing Fault Feature Extraction Scheme with the New IMF Selection Procedure
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Zhang, Y.; Wen, B.; Leung, A.Y.T. Reliability Analysis for Rotor Rubbing. J. Vib. Acoust. 2002, 124, 58–62. [Google Scholar] [CrossRef]
- Rubio, E.; Jáuregui, J.C. Time-Frequency Analysis for Rotor-Rubbing Diagnosis; Citeseer: London, UK, 2011. [Google Scholar]
- Cong, F.; Chen, J.; Dong, G.; Huang, K. Experimental validation of impact energy model for the rub–impact assessment in a rotor system. Mech. Syst. Signal Process. 2011, 25, 2549–2558. [Google Scholar] [CrossRef]
- Lu, Y.; Meng, F.; Li, Y. Research on Rub Impact Fault Diagnosis Method of Rotating Machinery Based on Wavelet Packet and Support Vector Machine. In Measuring Technology and Mechatronics Automation; IEEE: Piscataway, NJ, USA, 2009; pp. 707–710. [Google Scholar]
- Zhihao, J.; Shangwei, J.; Wen, J.; Bangchun, W. Rubbing Fault Diagnosis of Rotary Machinery Based on Wavelet and Support Vector Machine. In 2009 First International Workshop on Database Technology and Applications; IEEE: Piscataway, NJ, USA, 2009; pp. 287–290. [Google Scholar]
- Roy, S.D.; Shome, S.K.; Laha, S.K. Impact of wavelets and filter on vibration-based mechanical rub detection using Neural Networks. In Proceedings of the 11th Annual IEEE India Conference (INDICON), Pune, India, 11–13 December 2014; IEEE: Piscataway, NJ, USA, 2014; pp. 1–6. [Google Scholar]
- Tse, P.W.; Yang, W.; Tam, H.Y. Machine fault diagnosis through an effective exact wavelet analysis. J. Sound Vib. 2004, 277, 1005–1024. [Google Scholar] [CrossRef]
- Bessous, N.; Zouzou, S.E.; Bentrah, W.; Sbaa, S.; Sahraoui, M. Diagnosis of bearing defects in induction motors using discrete wavelet transform. Int. J. Syst. Assur. Eng. Manag. 2018, 9, 335–343. [Google Scholar] [CrossRef]
- Bessam, B.; Menacer, A.; Boumehraz, M.; Cherif, H. Wavelet transform and neural network techniques for inter-turn short circuit diagnosis and location in induction motor. Int. J. Syst. Assur. Eng. Manag. 2017, 8, 478–488. [Google Scholar] [CrossRef]
- Deng, L.; Zhao, R. Fault feature extraction of a rotor system based on local mean decomposition and Teager energy kurtosis. J. Mech. Sci. Technol. 2014, 28, 1161–1169. [Google Scholar] [CrossRef]
- Niaoqing, H.; Min, C.; Xisen, W. The Application of Stochastic Resonance Theory for Early Detecting Rub-Impact Fault of Rotor System. Mech. Syst. Signal Process. 2003, 17, 883–895. [Google Scholar] [CrossRef]
- Wang, S.; Chen, X.; Li, G.; Li, X.; He, Z. Matching Demodulation Transform with Application to Feature Extraction of Rotor Rub-Impact Fault. IEEE Trans. Instrum. Meas. 2014, 63, 1372–1383. [Google Scholar] [CrossRef]
- Yang, Y.; Cheng, J.; Zhang, K. An ensemble local means decomposition method and its application to local rub-impact fault diagnosis of the rotor systems. Measurement 2012, 45, 561–570. [Google Scholar] [CrossRef]
- Yang, L.; Chen, X.; Wang, S.; Zuo, H. Rub-Impact Detection of Rotor Systems Using Time-Frequency Techniques. In Proceedings of the ASME 2016 International Mechanical Engineering Congress and Exposition, Phoenix, AZ, USA, 11–17 November 2016; American Society of Mechanical Engineers: New York, NY, USA, 2016; p. V04BT05A011. [Google Scholar]
- Huang, N.E.; Shen, Z.; Long, S.R.; Wu, M.C.; Shih, H.H.; Zheng, Q.; Yen, N.-C.; Tung, C.C.; Liu, H.H. The empirical mode decomposition and the Hilbert spectrum for nonlinear and non-stationary time series analysis. Proc. R. Soc. A 1998, 454, 903–995. [Google Scholar] [CrossRef]
- Lei, Y.; Lin, J.; He, Z.; Zuo, M.J. A review on empirical mode decomposition in fault diagnosis of rotating machinery. Mech. Syst. Signal Process. 2013, 35, 108–126. [Google Scholar] [CrossRef]
- Zhang, Y.; Zhang, C.; Sun, J.; Guo, J. Improved Wind Speed Prediction Using Empirical Mode Decomposition. Adv. Electr. Comput. Eng. 2018, 18, 3–10. [Google Scholar] [CrossRef]
- Zhu, J.; Sun, P.; Gao, Y.; Zheng, P. Clock Differences Prediction Algorithm Based on EMD-SVM. Chin. J. Electron. 2018, 27, 128–132. [Google Scholar] [CrossRef]
- Zhao, G.; Liang, Q.; Durrani, T.S. An EMD Based Sense-Through-Foliage Target Detection UWB Radar Sensor Networks. IEEE Access 2018, 6, 29254–29261. [Google Scholar] [CrossRef]
- Zhao, Y.; Liu, E.; Zhu, J.; Zhang, B.; Wang, J.; Tian, H. Rub-impact fault diagnosis of rotating machinery based on Hilbert-Huang transform. In Proceedings of the 2015 IEEE International Conference on Mechatronics and Automation (ICMA), Beijing, China, 2–5 August 2015; pp. 32–36. [Google Scholar]
- Yang, Y.; Zhang, S.; Han, Q.; Qu, Y. Vibration Fault analysis for rotor systems by using Hilbert spectrum. In Proceedings of the 2010 International Conference on Mechanic Automation and Control Engineering, Wuhan, China, 26–28 June 2010; pp. 2411–2414. [Google Scholar]
- Cheng, J.; Yu, D.; Tang, J.; Yang, Y. Local rub-impact fault diagnosis of the rotor systems based on EMD. Mech. Mach. Theory 2009, 44, 784–791. [Google Scholar] [CrossRef]
- Xiang, L.; Tang, G.; Hu, A. Analysis of Rotor Rubbing Fault Signal Based on Hilbert-Huang Transform. In Proceedings of the 2009 International Conference on Measuring Technology and Mechatronics Automation, Zhangjiajie, China, 11–12 April 2009; IEEE: Piscataway, NJ, USA, 2009; pp. 586–589. [Google Scholar]
- Li, Y.; Meng, F.; Lu, Y. Research on rub impact fault diagnosis method of rotating machinery based on EMD and SVM. In Proceedings of the 2009 International Conference on Mechatronics and Automation, Changchun, China, 9–12 August 2009; IEEE: Piscataway, NJ, USA, 2009; pp. 4806–4810. [Google Scholar]
- Wu, Z.; Huang, N.E. Ensemble empirical mode decomposition: A noise-assisted data analysis method. Adv. Adapt. Data Anal. 2009, 1, 1–41. [Google Scholar] [CrossRef]
- Qin, X.; Li, Q.; Dong, X.; Lv, S. The Fault Diagnosis of Rolling Bearing Based on Ensemble Empirical Mode Decomposition and Random Forest. Shock Vib. 2017, 2017, 1–9. [Google Scholar] [CrossRef] [Green Version]
- Yu, K.; Lin, T.R.; Tan, J.W. A bearing fault diagnosis technique based on singular values of EEMD spatial condition matrix and Gath-Geva clustering. Appl. Acoust. 2017, 121, 33–45. [Google Scholar] [CrossRef]
- Lei, Y.; He, Z.; Zi, Y. Application of the EEMD method to rotor fault diagnosis of rotating machinery. Mech. Syst. Signal Process. 2009, 23, 1327–1338. [Google Scholar] [CrossRef]
- Li, Z.; Shi, B. Research of Fault Diagnosis Based on Sensitive Intrinsic Mode Function Selection of EEMD and Adaptive Stochastic Resonance. Shock Vib. 2016, 2016, 1–12. [Google Scholar] [CrossRef]
- Lei, Y.; Zuo, M.J. Fault diagnosis of rotating machinery using an improved HHT based on EEMD and sensitive IMFs. Meas. Sci. Technol. 2009, 20, 125701. [Google Scholar] [CrossRef]
- Yi, C.; Wang, D.; Fan, W.; Tsui, K.-L.; Lin, J. EEMD-Based Steady-State Indexes and Their Applications to Condition Monitoring and Fault Diagnosis of Railway Axle Bearings. Sensors 2018, 18, 704. [Google Scholar] [CrossRef] [PubMed]
- Liao, Y.; Sun, P.; Wang, B.; Qu, L. Extraction of repetitive transients with frequency domain multipoint kurtosis for bearing fault diagnosis. Meas. Sci. Technol. 2018, 29, 055012. [Google Scholar] [CrossRef] [Green Version]
- Wang, D.; Tse, P.W.; Tsui, K.L. An enhanced Kurtogram method for fault diagnosis of rolling element bearings. Mech. Syst. Signal Process. 2013, 35, 176–199. [Google Scholar] [CrossRef]
- Komaty, A.; Boudraa, A.-O.; Augier, B.; Dare-Emzivat, D. EMD-Based Filtering Using Similarity Measure Between Probability Density Functions of IMFs. IEEE Trans. Instrum. Meas. 2014, 63, 27–34. [Google Scholar] [CrossRef] [Green Version]
- Kang, M.; Kim, J.; Kim, J.-M.; Tan, A.C.C.; Kim, E.Y.; Choi, B.-K. Reliable Fault Diagnosis for Low-Speed Bearings Using Individually Trained Support Vector Machines with Kernel Discriminative Feature Analysis. IEEE Trans. Power Electron. 2015, 30, 2786–2797. [Google Scholar] [CrossRef]
- Islam, M.M.M.; Khan, S.A.; Kim, J.-M. Multi-fault Diagnosis of Roller Bearings Using Support Vector Machines with an Improved Decision Strategy. In Advanced Intelligent Computing Theories and Applications; Huang, D.-S., Han, K., Eds.; Springer International Publishing: Cham, Switzerland, 2015; Volume 9227, pp. 538–550. ISBN 978-3-319-22052-9. [Google Scholar]
- He, D.; Li, R.; Zhu, J. Plastic Bearing Fault Diagnosis Based on a Two-Step Data Mining Approach. IEEE Trans. Ind. Electron. 2012, 3429–3440. [Google Scholar] [CrossRef]
- Chu, F.; Lu, W. Experimental observation of nonlinear vibrations in a rub-impact rotor system. J. Sound Vib. 2005, 283, 621–643. [Google Scholar] [CrossRef]
- Cha, S.-H. Comprehensive survey on distance/similarity measures between probability density functions. City 2007, 1, 1. [Google Scholar]
- Xia, Z.; Xia, S.; Wan, L.; Cai, S. Spectral Regression Based Fault Feature Extraction for Bearing Accelerometer Sensor Signals. Sensors 2012, 12, 13694–13719. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Han, T.; Yang, B.-S.; Choi, W.-H.; Kim, J.-S. Fault Diagnosis System of Induction Motors Based on Neural Network and Genetic Algorithm Using Stator Current Signals. Int. J. Rotating Mach. 2006, 2006, 1–13. [Google Scholar] [CrossRef] [Green Version]
- Randall, R.B.; Antoni, J. Rolling element bearing diagnostics—A tutorial. Mech. Syst. Signal Process. 2011, 25, 485–520. [Google Scholar] [CrossRef]
- Lei, Y.; Li, N.; Guo, L.; Li, N.; Yan, T.; Lin, J. Machinery health prognostics: A systematic review from data acquisition to RUL prediction. Mech. Syst. Signal Process. 2018, 104, 799–834. [Google Scholar] [CrossRef]
- Abdelrhman, A.M.; Leong, M.S.; Hee, L.M.; Ngui, W.K. Application of Wavelet Analysis in Blade Faults Diagnosis for Multi-Stages Rotor System. Appl. Mech. Mater. 2013, 393, 959–964. [Google Scholar] [CrossRef]
- Wu, X.; Kumar, V.; Ross Quinlan, J.; Ghosh, J.; Yang, Q.; Motoda, H.; McLachlan, G.J.; Ng, A.; Liu, B.; Yu, P.S.; et al. Top 10 algorithms in data mining. Knowl. Inf. Syst. 2008, 14, 1–37. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Displacement Sensors (3300 XL NSv) | Frequency range: 0 to 10 kHz Sensitivity: 7.87 V/mm (200 mV/mil) +12.5%/−20% |
| DAQ System (Pulse 3560 C) | Generator: Input/Output 4/2 ch. module Input/Output 5/1-ch. controller module Frequency range: 0 to 25.6 kHz |
| Parameters | Equations | Parameters | Equations |
|---|---|---|---|
| Root mean square | Square root of the amplitude | ||
| Skewness | Kurtosis | ||
| Mean frequency | RMS frequency | ||
| Frequency standard deviation |
| Class | 0.0 | 0.5 | 1.0 | 1.5 | 1.6 | 1.7 | 1.8 | 2.0 | 2.4 | 2.8 | |
|---|---|---|---|---|---|---|---|---|---|---|---|
| k | |||||||||||
| 1 | 0.12 | 0.23 | 0.92 | 1.2 | 0.75 | 1.44 | 1.47 | 2.24 | 0.78 | 1.64 | |
| 2 | 1.66 | 0.77 | 2.47 | 1.8 | 1.12 | 3.57 | 3.9 | 2.85 | 2.2 | 2.98 | |
| 3 | 2.3 | 3.86 | 20.6 | 19.2 | 2.52 | 21.9 | 7.24 | 28.3 | 2.44 | 20.4 | |
| 4 | 0.17 | 0.09 | 0.24 | 0.17 | 0.55 | 0.31 | 0.29 | 0.34 | 0.22 | 0.12 | |
| 5 | 0.38 | 0.23 | 0.21 | 0.17 | 0.9 | 0.12 | 0.32 | 0.25 | 0.21 | 0.32 | |
| 6 | 0.44 | 0.67 | 0.62 | 0.21 | 031 | 0.71 | 0.35 | 0.19 | 0.21 | 0.26 | |
| 7 | 1.71 | 7.48 | 5.75 | 3.39 | 1.34 | 3.79 | 6.41 | 4.46 | 1.45 | 12.2 | |
| 8 | 2.93 | 7.37 | 25.2 | 18.7 | 2.45 | 30.5 | 8.2 | 27.1 | 2.53 | 18.9 | |
| 9 | 0.96 | 12.2 | 17.5 | 34.0 | 6.37 | 25.8 | 12.6 | 51.1 | 8.12 | 29.0 | |
| 10 | 1.21 | 5.1 | 43.1 | 40.1 | 8.45 | 45.8 | 10.3 | 88.1 | 8.01 | 70.7 | |
| 11 | 0.61 | 0.3 | 0.16 | 0.32 | 0.12 | 0.28 | 0.17 | 0.15 | 0.95 | 0.43 | |
| 12 | 0.38 | 0.2 | 0.18 | 0.16 | 0.14 | 0.19 | 0.23 | 0.19 | 0.34 | 0.18 | |
| 13 | 0.23 | 0.26 | 0.22 | 0.24 | 0.25 | 0.23 | 0.28 | 0.17 | 0.22 | 0.25 | |
| 14 | 0.23 | 0.26 | 0.24 | 0.3 | 0.31 | 0.22 | 0.23 | 0.25 | 0.27 | 0.24 | |
| 15 | 0.23 | 0.26 | 0.27 | 0.25 | 0.42 | 0.30 | 0.24 | 0.24 | 0.31 | 0.27 | |
| 16 | 0.29 | 0.24 | 0.27 | 0.24 | 0.23 | 0.33 | 0.33 | 0.24 | 0.33 | 0.30 | |
| 17 | 0.23 | 0.3 | 0.23 | 0.24 | 0.41 | 0.23 | 0.28 | 0.24 | 0.27 | 0.29 | |
| 18 | - | - | - | - | - | - | 0.23 | - | - | - | |
| Classes | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| 0 | 0.5 | 1.0 | 1.5 | 1.6 | 1.7 | 1.8 | 2.0 | 2.4 | 2.8 | |
| Selected IMFs | 2,3,7 8,10 | 3,7,8 9,10 | 2,3,7 8,9,10 | 1,2,3,7,8,9,10 | 2,3,7,8,9,10 | 1,2,3,7 8,9,10 | 1,2,3,78,9,10 | 1,2,3,7 8,9,10 | 2,3,7 8,9,10 | 1,2,3,78,9,10 |
| Method | Average TPR (St.Dev) (%) | ACA (St.Dev) (%) | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| 0 | 0.5 | 1.0 | 1.5 | 1.6 | 1.7 | 1.8 | 2.0 | 2.4 | 2.8 | ||
| Proposed | 100 (0) | 100 (0) | 100 (0) | 100 (0) | 100 (0) | 99.5 (1.5) | 99.75 (1.1) | 100 (0) | 100 (0) | 100 (0) | 99.8 (0.14) |
| SensIMF + HFM | 95.9 (3.8) | 95.25 (1.1) | 98.25 (2.4) | 100 (0) | 93.0 (2.9) | 97.5 (2.5) | 96.6 (2.9) | 100 (0) | 97.5 (2.9) | 100 (0) | 96.6 (0.33) |
| WPT + MSV | 100 (0) | 100 (0) | 100 (0) | 78.6 (5.6) | 99.5 (1.5) | 88.2 (3.5) | 100 (0) | 88.6 (4.37) | 99.75 (1.1) | 99.75 (1.1) | 95.0 (0.7) |
| EMD + MSV | 99.7 (3.3) | 76.1 (7.7) | 89.1 (3.5) | 60.1 (9.8) | 78.4 (4.9) | 11.3 (4.9) | 8.8 (4.0) | 41.2 (10.6) | 42.7 (13.0) | 100 (0) | 60.0 (2.13) |
| DWT + TDSIG | 10.7 (14.3) | 44.8 (17.0) | 12.3 (15.1) | 9.44 (15.4) | 19.3 (19.1) | 10.6 (14.5) | 67.2 (12.8) | 17.4 (19.5) | 19.7 (21.2) | 12.5 (15.2) | 22.6 (3.06) |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Prosvirin, A.E.; Islam, M.; Kim, J.; Kim, J.-M. Rub-Impact Fault Diagnosis Using an Effective IMF Selection Technique in Ensemble Empirical Mode Decomposition and Hybrid Feature Models. Sensors 2018, 18, 2040. https://doi.org/10.3390/s18072040
Prosvirin AE, Islam M, Kim J, Kim J-M. Rub-Impact Fault Diagnosis Using an Effective IMF Selection Technique in Ensemble Empirical Mode Decomposition and Hybrid Feature Models. Sensors. 2018; 18(7):2040. https://doi.org/10.3390/s18072040
Chicago/Turabian StyleProsvirin, Alexander E., Manjurul Islam, Jaeyoung Kim, and Jong-Myon Kim. 2018. "Rub-Impact Fault Diagnosis Using an Effective IMF Selection Technique in Ensemble Empirical Mode Decomposition and Hybrid Feature Models" Sensors 18, no. 7: 2040. https://doi.org/10.3390/s18072040
APA StyleProsvirin, A. E., Islam, M., Kim, J., & Kim, J. -M. (2018). Rub-Impact Fault Diagnosis Using an Effective IMF Selection Technique in Ensemble Empirical Mode Decomposition and Hybrid Feature Models. Sensors, 18(7), 2040. https://doi.org/10.3390/s18072040